JP3818708B2 - アクチュエータ - Google Patents
アクチュエータ Download PDFInfo
- Publication number
- JP3818708B2 JP3818708B2 JP30062596A JP30062596A JP3818708B2 JP 3818708 B2 JP3818708 B2 JP 3818708B2 JP 30062596 A JP30062596 A JP 30062596A JP 30062596 A JP30062596 A JP 30062596A JP 3818708 B2 JP3818708 B2 JP 3818708B2
- Authority
- JP
- Japan
- Prior art keywords
- rolling
- slide table
- rolling groove
- actuator body
- cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/08—Characterised by the construction of the motor unit
- F15B15/14—Characterised by the construction of the motor unit of the straight-cylinder type
- F15B2015/1495—Characterised by the construction of the motor unit of the straight-cylinder type with screw mechanism attached to the piston
Description
【発明の属する技術分野】
本発明は、駆動源の駆動作用下にアクチュエータボデイの軸線方向に沿ってスライドテーブルを往復動作させるアクチュエータに関する。
【0002】
【従来の技術】
従来から、ワーク等の搬送手段としてアクチュエータが用いられている。このアクチュエータは、ガイド部材の案内作用下に長尺なフレームに沿って移動テーブルを直線状に往復運動させることにより、前記移動テーブルに載置されたワークを搬送するものである。
【0003】
従来技術に係るアクチュエータは、駆動手段として圧力流体が用いられる流体圧アクチュエータと、駆動手段としてモータが用いられる電動アクチュエータとに大別される。
【0004】
流体圧アクチュエータでは、圧力流体の作用下にピストンを往復動作させ、前記ピストンに固定された移動テーブルを一体的に変位させる構成が採用されている。一方、電動アクチュエータでは、モータの回転駆動力をボールねじに伝達し、前記ボールねじの螺回作用下に移動テーブルを変位させる構成が採用されている。
【0005】
【発明が解決しようとする課題】
しかしながら、前記流体圧アクチュエータでは、移動テーブルを圧力流体の作用下に変位させているため、所定位置に高精度に位置決めすることができないという不都合がある。
【0006】
また、前記電動アクチュエータでは、移動テーブルをモータの回転駆動力によって変位させているため、ワークが重量物であると該モータに付与される負荷が大きくなって大型のモータを用いなければならず、装置全体が大型化するという不都合がある。
【0007】
本発明は、前記の不都合を克服するためになされたものであり、スライドテーブルを高精度に位置決めすることができるとともに、重量物からなるワークを円滑に変位させることが可能な駆動力を有するアクチュエータを提供することを目的とする。
【0008】
【課題を解決するための手段】
前記の目的を達成するために、本発明は、回転駆動部とシリンダ部とが併設されたアクチュエータボデイと、
前記回転駆動部に設けられ、駆動力伝達軸に対し回転駆動力を伝達する回転駆動源と、
前記シリンダ部に設けられ、圧力流体の作用下に変位するピストンを含むシリンダ機構と、
前記回転駆動源の駆動力および前記ピストンの押圧力が共に伝達され、前記アクチュエータボデイの長手方向に沿って変位自在に設けられたスライドテーブルと、
を備え、
前記シリンダ部は、前記ピストンが収装され前記アクチュエータボデイに一体的に膨出形成された断面矩形状のシリンダチューブと、一端部が前記ピストンに連結され他端部が前記シリンダチューブから外部に突出して前記スライドテーブルの屈曲部に連結されるピストンロッドとを有し、
前記アクチュエータボデイには、前記シリンダチューブに隣接し該アクチュエータボデイの長手方向に沿って延在する断面略矩形状の凹部が形成され、前記スライドテーブルの下面部には、前記凹部に対応する断面矩形状からなる軸受ブロックが固定され、前記軸受ブロックは、前記駆動力伝達軸との係合作用下に前記凹部に沿って該スライドテーブルと一体的に変位するように設けられ、
前記スライドテーブルが前記アクチュエータボデイの長手方向に沿って変位する際、該スライドテーブルを案内するガイド手段が設けられ、
前記ガイド手段は、前記回転駆動部に設けられ、前記アクチュエータボデイの前記凹部に形成された第1転動溝と、前記スライドテーブルに固定された前記軸受ブロックに形成され前記第1転動溝に対向する第2転動溝と、前記第2転動溝から所定距離離間して前記軸受ブロックに形成された第1転動穴と、前記第1転動溝、第2転動溝および第1転動穴からなる第1循環通路に沿って転動する複数の転動体とを有し、
前記第1転動溝と第2転動溝と第1転動穴とを結んだ仮想線が水平軸に対し所定角度傾斜して交差するように四方向に設けられ、
さらに、前記ガイド手段は、前記シリンダ部の前記スライドテーブルと前記シリンダチューブとの間に設けられ、前記スライドテーブルの下面に形成された第3転動溝と、前記第3転動溝に対向し前記シリンダチューブの上面に形成された第4転動溝と、前記第3転動溝から前記スライドテーブルの上側に向かって所定角度傾斜した部位に設けられた第2転動穴と、相互に対向する前記第3転動溝及び第4転動溝と前記第2転動穴とからなる第2循環通路に沿って転動する複数の他の転動体とを有することを特徴とする。
【0010】
本発明によれば、回転駆動部とシリンダ部とを併設し、回転駆動源の駆動力およびピストンの押圧力をスライドテーブルに共に伝達することにより、前記アクチュエータボデイの長手方向に沿ってスライドテーブルを変位させることができる。
【0011】
【発明の実施の形態】
本発明に係るアクチュエータについて好適な実施の形態を挙げ、添付の図面を参照しながら以下詳細に説明する。
【0012】
図1〜図3において、参照数字10は、本発明の実施の形態に係るアクチュエータを示す。このアクチュエータ10は、アルミニウム等の材料によって形成されたアクチュエータボデイ12と、前記アクチュエータボデイ12に沿って直線状に往復動作する断面L字状のスライドテーブル14とを有する。なお、前記アクチュエータボデイ12の表面には、硬質アルマイト処理を施すとよい。
【0013】
前記アクチュエータ10は、シリンダ部16とモータ部(回転駆動部)18とから構成され、前記シリンダ部16およびモータ部18はアクチュエータボデイ12の軸線方向に沿って略平行に併設される。図2に示されるように、前記アクチュエータボデイ12の下面20には、長手方向に沿って略平行に4条の取付用長溝22a〜22dが形成され、図示しない取付手段を前記取付用長溝22a〜22dに装着することにより、アクチュエータ10を他の部材に固定することができる。
【0014】
また、前記アクチュエータボデイ12の下面20に直交する一側面24には、一組のセンサ用長溝26a、26bが略平行に形成され、一方、前記一組のセンサ用長溝26a、26bに対向するスライドテーブル14のプレート部28には磁石30を装着するための一組の溝部32a、32bが形成される。前記センサ用長溝26a、26bの所定部位に装着されたセンサ34を介して磁石30の磁界を検知することにより、直線状に変位するスライドテーブル14の位置を検出することができる。
【0015】
シリンダ部16は、アクチュエータボデイ12と一体的に形成されその一部からなるシリンダチューブ36と、前記シリンダチューブ36の内部に形成されたシリンダ室38に収装される楕円形のピストン40と、一端部が前記ピストン40に連結され、他端部がシリンダチューブ36から外部に突出してスライドテーブル14の屈曲部42に連結されるピストンロッド44とを有する。なお、シリンダチューブ36には、シリンダ室38に圧力流体を供給するための一組の圧力流体出入ポート(図示せず)が形成される。
【0016】
モータ部18は、アクチュエータボデイ12の凹部46に沿って変位自在に設けられ、スライドテーブル14の下面部に固定される軸受ブロック48と、前記軸受ブロック48の軸線方向に沿ってボールねじ50が螺合するように形成されたねじ穴とを有する。
【0017】
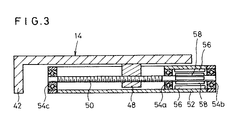
モータ部18の一端部には、モータが収納されたモータブロック52が設けられ、前記モータブロック52は、アクチュエータボデイ12と面一に形成される。前記モータの駆動軸はボールねじ50を延長して一体的に形成され、前記駆動軸は所定間隔離間する第1軸受部材54aおよび第2軸受部材54bによって回動自在に支持される。なお、ボールねじ50の一端部は、第3軸受部材54cによって回動自在に軸支される。
【0018】
この場合、前記モータとして、例えば、ACサーボモータまたはステッピングモータを用いると好適である。モータブロック52の内部には、該モータブロック52に固定されたステータコイル56と駆動軸に固定されたロータ58が設けられる。また、ボールねじ50に代替して送りねじを用いてもよい。
【0019】
図2に示されるように、アクチュエータボデイ12に形成された凹部46と軸受ブロック48との間には、前記凹部46の内壁面に形成されアクチュエータボデイ12の長手方向に沿って延在する第1転動溝60と、前記第1転動溝60に対向して軸受ブロック48に形成された第2転動溝62とが設けられる。さらに、該第2転動溝62から所定間隔離間する部位には、上側並びに下側に向かって所定角度傾斜し、軸受ブロック48の軸線方向に沿って貫通する第1転動穴(転動穴)64が形成される。
【0020】
この場合、第1転動溝60、第2転動溝62および第1転動穴64を結ぶ仮想線Tが、水平軸Hに対して所定角度θだけ傾斜して交差するように設けられる。前記第1転動溝60、第2転動溝62および第1転動穴64は、相互に連通して複数のボールベアリング(転動体)66が転動する循環軌道として機能するものである。なお、好適には、複数のボールベアリング66をアルミニウム材料によって形成するとよい。
【0021】
スライドテーブル14とシリンダチューブ36との間には、前記スライドテーブル14の下面に形成された第3転動溝68と、前記第3転動溝68に対向してシリンダチューブ36の上面に形成された第4転動溝70とが設けられる。さらに、前記第3転動溝68から上側に向かって所定角度傾斜した部位には、第2転動穴72が形成され、相互に対向する第3転動溝68、第4転動溝70並びに第2転動穴72とが連通して循環軌道が構成される。
【0022】
本実施の形態に係るアクチュエータ10は基本的には以上のように構成されるものであり、次にその動作並びに作用効果について説明する。
【0023】
図示しない電源に接続されたモータ部18が付勢され、モータの回転駆動力がボールねじ50に伝達される。前記ボールねじ50の螺回作用下に軸受ブロック48がアクチュエータボデイ12の長手方向に沿って変位し、前記軸受ブロック48と一体的にスライドテーブル14が直線状に変位する。
【0024】
前記モータ部18を付勢すると略同時にシリンダ部16を駆動させる。すなわち、図示しない圧力流体供給源を付勢し、前記圧力流体供給源から導出された圧力流体をシリンダチューブ36の一方の圧力流体出入ポートに導入する。前記圧力流体出入ポートを介してシリンダ室38に供給された圧力流体は、ピストン40を所定方向に押圧し、ピストン40に連結されたピストンロッド44を介してスライドテーブル14を直線状に変位させる。
【0025】
このように、駆動手段としてシリンダ部16とモータ部18とを併設し、圧力流体の作用下にピストン40を押圧する押圧力と、ボールねじ50を介して直線運動に変換されるモータの回転駆動力とを共にスライドテーブル14に伝達することにより、モータ部18の作用下にスライドテーブル14を高精度に位置決めすることができるとともに、シリンダ部16の作用下に重量物からなるワークを円滑に変位させることができる。
【0026】
また、本実施の形態に係るアクチュエータ10では、第1転動溝60、第2転動溝62および第1転動穴64を結ぶ仮想線Tを、水平軸Hに対して所定角度θだけ傾斜して交差するように四方向に設けることにより、循環軌道を転動するボールベアリング66の回転方向と該ボールベアリング66の進行方向(矢印方向)とが一致してその振動を最小限に抑制し、騒音を規制して高速循環させるという効果を得ることができる(図4A参照)。
【0027】
これに対して、図4Bに示されるように、第1転動溝60、第2転動溝62および転動穴65を結ぶ仮想線Tと水平軸Hとを略一致させて設けた場合、第1転動溝60、第2転動溝62によるボールベアリング66の回転方向と転動穴65によるボールベアリング66の回転方向とが平行になっていないため、矢印方向に沿って進行してきたボールベアリング66が転動穴65によってリターンする際に該ボールベアリング66に余分な負荷が付与される。この結果、ボールベアリング66による振動および騒音が発生する不具合がある。
【0029】
【発明の効果】
本発明によれば、以下の効果が得られる。
【0030】
すなわち、回転駆動部とシリンダ部とを併設し、回転駆動源の駆動力およびピストンの押圧力をスライドテーブルに共に伝達することにより、回転駆動部の作用下にスライドテーブルを高精度に位置決めすることができるとともに、シリンダ部の作用下に重量物からなるワークを円滑に変位させることができる。
【図面の簡単な説明】
【図1】本発明の実施の形態に係るアクチュエータを示す斜視図である。
【図2】図1に示すII−II線に沿った縦断面図である。
【図3】図1に示すIII−III線に沿った横断面図である。
【図4】図4Aは、本発明の実施の形態に係るアクチュエータの循環軌道を示す説明図であり、図4Bは、循環軌道の比較例を示す説明図である。
【符号の説明】
10…アクチュエータ 12…アクチュエータボデイ
14…スライドテーブル 16…シリンダ部
18…モータ部 40…ピストン
44…ピストンロッド 46…凹部
48…軸受ブロック 50…ボールねじ
52…モータブロック 54a〜54c…軸受部材
60、62、68、70…転動溝 64、65、72…転動穴
Claims (1)
- 回転駆動部とシリンダ部とが併設されたアクチュエータボデイと、
前記回転駆動部に設けられ、駆動力伝達軸に対し回転駆動力を伝達する回転駆動源と、
前記シリンダ部に設けられ、圧力流体の作用下に変位するピストンを含むシリンダ機構と、
前記回転駆動源の駆動力および前記ピストンの押圧力が共に伝達され、前記アクチュエータボデイの長手方向に沿って変位自在に設けられたスライドテーブルと、
を備え、
前記シリンダ部は、前記ピストンが収装され前記アクチュエータボデイに一体的に膨出形成された断面矩形状のシリンダチューブと、一端部が前記ピストンに連結され他端部が前記シリンダチューブから外部に突出して前記スライドテーブルの屈曲部に連結されるピストンロッドとを有し、
前記アクチュエータボデイには、前記シリンダチューブに隣接し該アクチュエータボデイの長手方向に沿って延在する断面略矩形状の凹部が形成され、前記スライドテーブルの下面部には、前記凹部に対応する断面矩形状からなる軸受ブロックが固定され、前記軸受ブロックは、前記駆動力伝達軸との係合作用下に前記凹部に沿って該スライドテーブルと一体的に変位するように設けられ、
前記スライドテーブルが前記アクチュエータボデイの長手方向に沿って変位する際、該スライドテーブルを案内するガイド手段が設けられ、
前記ガイド手段は、前記回転駆動部に設けられ、前記アクチュエータボデイの前記凹部に形成された第1転動溝と、前記スライドテーブルに固定された前記軸受ブロックに形成され前記第1転動溝に対向する第2転動溝と、前記第2転動溝から所定距離離間して前記軸受ブロックに形成された第1転動穴と、前記第1転動溝、第2転動溝および第1転動穴からなる第1循環通路に沿って転動する複数の転動体とを有し、
前記第1転動溝と第2転動溝と第1転動穴とを結んだ仮想線が水平軸に対し所定角度傾斜して交差するように四方向に設けられ、
さらに、前記ガイド手段は、前記シリンダ部の前記スライドテーブルと前記シリンダチューブとの間に設けられ、前記スライドテーブルの下面に形成された第3転動溝と、前記第3転動溝に対向し前記シリンダチューブの上面に形成された第4転動溝と、前記第3転動溝から前記スライドテーブルの上側に向かって所定角度傾斜した部位に設けられた第2転動穴と、相互に対向する前記第3転動溝及び第4転動溝と前記第2転動穴とからなる第2循環通路に沿って転動する複数の他の転動体とを有することを特徴とするアクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP30062596A JP3818708B2 (ja) | 1996-11-12 | 1996-11-12 | アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP30062596A JP3818708B2 (ja) | 1996-11-12 | 1996-11-12 | アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10141317A JPH10141317A (ja) | 1998-05-26 |
| JP3818708B2 true JP3818708B2 (ja) | 2006-09-06 |
Family
ID=17887121
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP30062596A Expired - Fee Related JP3818708B2 (ja) | 1996-11-12 | 1996-11-12 | アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3818708B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100340342B1 (ko) * | 1999-12-22 | 2002-06-12 | 최승환 | 슬라이드 실린더 |
| JP2002027732A (ja) * | 2000-07-06 | 2002-01-25 | Shinko Electric Co Ltd | リニアアクチュエータ |
| JP6325282B2 (ja) * | 2014-02-28 | 2018-05-16 | 株式会社アイエイアイ | センサユニット及びアクチュエータ |
| WO2015161846A1 (de) * | 2014-04-24 | 2015-10-29 | Schaeffler Technologies AG & Co. KG | Aktorvorrichtung für eine hydraulische betätigungsvorrichtung und entsprechende hydraulische betätigungsvorrichtung |
| CN108150630A (zh) * | 2018-02-08 | 2018-06-12 | 东莞市顺纳电子有限公司 | 一种无杆往返驱动器 |
-
1996
- 1996-11-12 JP JP30062596A patent/JP3818708B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10141317A (ja) | 1998-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3488686B2 (ja) | アクチュエータ | |
| JP3695784B2 (ja) | 電動アクチュエータ | |
| JP3899617B2 (ja) | アクチュエータ | |
| JP4491702B2 (ja) | リニアアクチュエータ | |
| JP2000088070A (ja) | 電動アクチュエータ | |
| EP0987468A2 (en) | Electric actuator | |
| WO2005103516A1 (ja) | 軸受ブッシュ及びこれを用いた複合運動装置 | |
| US20050011291A1 (en) | Electric actuator | |
| JP2011106489A (ja) | アクチュエータ | |
| JP3818708B2 (ja) | アクチュエータ | |
| KR100616461B1 (ko) | 액츄에이터 | |
| JPH07101699A (ja) | バランサ | |
| JP3165115B2 (ja) | アクチュエータ | |
| CN113182864A (zh) | 一种传动轴总成散热装置的自动加工设备 | |
| JP2000170865A (ja) | プレス機のリニアモ―タ―式のテ―ブル及びプレス機 | |
| JP2000065179A (ja) | リニアモーター | |
| JPH088322Y2 (ja) | アクチュエータ | |
| JP4567926B2 (ja) | ガイド装置 | |
| JP3657561B2 (ja) | 非接触シーリング構造をもつ部品吸着ヘッド | |
| JPH0340038U (ja) | ||
| JP3710098B2 (ja) | 電動アクチュエータ | |
| JPH0525003U (ja) | スライドアクチユエータ | |
| WO2020116420A1 (ja) | シリンダ装置 | |
| JPH0344392Y2 (ja) | ||
| JPH0527338U (ja) | 直線作動ユニツト |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050607 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050803 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060207 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060407 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060516 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060613 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |