JP3634005B2 - 現在位置算出装置 - Google Patents
現在位置算出装置 Download PDFInfo
- Publication number
- JP3634005B2 JP3634005B2 JP13953595A JP13953595A JP3634005B2 JP 3634005 B2 JP3634005 B2 JP 3634005B2 JP 13953595 A JP13953595 A JP 13953595A JP 13953595 A JP13953595 A JP 13953595A JP 3634005 B2 JP3634005 B2 JP 3634005B2
- Authority
- JP
- Japan
- Prior art keywords
- current position
- candidate point
- reliability
- vehicle
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000004364 calculation method Methods 0.000 title claims description 21
- 238000013500 data storage Methods 0.000 claims description 4
- 238000001514 detection method Methods 0.000 claims description 2
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 238000000034 method Methods 0.000 description 42
- 230000008569 process Effects 0.000 description 40
- 238000012545 processing Methods 0.000 description 29
- 238000010586 diagram Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000012217 deletion Methods 0.000 description 2
- 230000037430 deletion Effects 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images







Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Description
【産業上の利用分野】
本発明は、車両等の移動体に搭載され、該移動体の走行距離、進行方位などを測定して、これにより、当該移動体の現在位置を算出する現在位置算出装置に関するものである。
【0002】
【従来技術】
従来より、道路上を走行する車両の現在位置を算出する現在位置算出装置において、該車両の現在位置は、ジャイロ等の方位センサにより測定した車両の進行方向と、車速センサまたは距離センサにより測定した車両の走行距離とに基づいて算出されている。
【0003】
また、車両の走行距離は、一般的には、トランスミッションの出力軸、または、タイヤの回転数を計測して、その回転数に、タイヤ1回転あたりに車両が進む距離である距離係数を乗ずることにより求められている。
【0004】
さらに、このように車両の進行方向と走行距離から求めた現在位置の誤差を補正するために、特開昭63−148115号公報に記載のように、道路に整合するように、求められた車両の現在位置を修正する、いわゆる、マップマッチングの技術が知られており、このマップマッチングの技術により、現在位置算出の精度を高めることができる。
【0005】
【発明が解決しようとする課題】
しかしながら、車両の仮想現在位置に対して所定の範囲内に位置するすべての道路を検索する処理を実行することが必要であり、そのために要する時間は、当該所定の範囲内に位置する道路の密度に依存し、特に、道路が市街地内に存在するものであった場合には、処理時間が著しく長くなる。さらに、道路上に求められた現在位置候補点の信頼度を算出するために要する処理時間も長くなる。
【0006】
道路を検索するための処理時間および信頼度を算出するための処理時間が、著しく長くなることにより、装置が実行すべき他の処理、たとえば、方位センサのデータの読み取り、車速センサまたは距離センサのデータの読み取り、或いは、車速センサまたは距離センサのデータに基づく車両の走行距離の算出などを適切に行うことができない場合があるという問題点があった。
【0007】
本発明は、マップマッチングの精度を損なうことなく、その処理負荷を軽減することができる現在位置算出装置を提供することを目的とする。
【0008】
【課題を解決する手段】
本発明の目的は、車両に搭載され、該車両の現在位置を算出する現在位置算出装置であって、
車両の進行方位を検出する方位検出手段と、
車両の走行距離を算出する距離算出手段と、
道路データを格納した道路データ格納手段と、
前記進行方位および前記走行距離に基づき得られた相対変位に基づいて、車両の現在位置を仮想現在位置として推定し、該仮想現在位置を前記道路データ格納手段の道路データと照合して、道路上の現在位置の候補点をその信憑性を示す信頼度とともに算出し、該信頼度の最も高い候補点を現在位置と認定するマップマッチング手段とを備え、
該マップマッチング手段は、前記信頼度の最も高い候補点以外の候補点についても次回の仮想現在位置の推定およびそれに伴う候補点の算出を行い、その際、算出された信頼度が予め定めた程度より低い候補点を削除することを特徴とする現在位置算出装置により達成される。
【0009】
この装置において、前記予め定めた程度より低い候補点は、例えば、前記最も信頼度の高い候補点の信頼度に比べて予め定められた量以上低い信頼度を有する候補点である。
【0010】
前記マップマッチング手段は、好ましくは、前記仮想現在位置の周辺の道路に対する距離、およびその道路方位と車両方位との方位差に基づいて、当該道路上に求まる候補点の信頼度を算出する。
【0011】
前記マップマッチング手段は、道路外にある仮想現在位置に対応する道路上の候補点がみつからないとき、当該道路外にある仮想現在位置を候補点とし、該道路外の候補点を削除するか否かを判定する際に用いる前記予め定められた程度を、道路上の候補点に比べて削除されや易いように設定することもできる。
【0012】
【作用】
マップマッチング処理においては、原則的には、車両の現在位置に対して新たに求められた相対走行距離および進行方位に基づいて、仮想現在位置を算出し、この仮想現在位置を付近の道路データと対照して、最も確からしい(信頼度が最も高い)と判断される道路上の位置を求め、これを現在位置と認定する。しかし、誤差による誤認定を防止するために、最も確からしいと判断された現在位置の候補点以外の候補点のデータを直ちに破棄せず、その候補点についてもそれに基づく新たな候補点を算出し、これらの候補点の中から最も確からしい候補点を現在位置と認定する。
【0013】
このように最も確からしい候補点以外の候補点のデータも保持して、これらから新たな候補点を求めると、保持すべきデータが相当数に増大する可能性がある。これは、リアルタイムに処理すべきマップマッチング処理の実行においてプロセッサに過大な処理負荷を課すおそれがある。特に、市街地のように道路が密集している地域では、この問題が顕著となる。本発明では、候補点に関して与えられたその信憑性を示す信頼度を検査して、信頼度が予め定めた程度より低い候補点を削除する。
【0014】
これによって、マップマッチング処理の信頼性を維持しながら、その処理における処理対象の数、すなわち処理負荷を軽減し、処理実行に要する時間を短縮することが可能となる。
【0015】
【実施例】
以下、添付図面に基づいて、本発明の実施例につき詳細に説明を加える。
【0016】
図1は、本発明の実施例にかかる現在位置算出装置の構成を示すブロックダイヤグラムである。図1に示すように、この現在位置算出装置10は、車両のヨーレイトを検出することで進行方位変化を検出する角速度センサ11と、地磁気を検出することで車両の進行方位を検出する地磁気センサ12と、車両のトランスミッションの出力軸の回転に比例した時間間隔でパルスを出力する車速センサ13を備えている。
【0017】
また、現在位置周辺の地図や現在位置を示すマーク等を表示するディスプレイ17と、ディスプレイ17に表示する地図の縮尺切り替えの指令をユーザに(運転者)から受け付けるスイッチ14と、デジタル地図データを記憶しておくCD−ROM15と、そのCD−ROM15から地図データを読みだすためのドライバ16とを備えている。また、以上に示した各周辺装置の動作の制御を行うコントローラ18を備えている。本実施例において、上述したディジタル地図データには、複数の線分の端部を示す座標から構成される道路データ、或いは、該道路の道幅を示す道路幅データ、道路が高速道路或いは一般道路であるかを示す高速道路フラグなどが含まれる。
【0018】
コントローラ18は、角速度センサ11の信号(アナログ)をデジタル信号に変換するA/D変換器19と、地磁気センサ12の信号(アナログ)をデジタル信号に変換するA/D変換器20と、車速センサ13から出力されるパルス数を0.1秒毎にカウントするカウンタ26と、スイッチ14の押圧の有無を入力するパラレルI/O21と、CD−ROM15から読みだされた地図データを転送するDMA(Direct Memory Access)コントローラ22と、ディスプレイ17に地図画像を表示する表示プロセッサ23とを有する。
【0019】
また、コントローラ18は、さらに、マイクロプロセッサ24と、メモリ25とを有する。マイクロプロセッサ24は、A/D変換器19を介して得た角速度センサ11の信号、A/D変換器20を介して得た地磁気センサ12の信号、カウンタ26がカウントした車速センサ13の出力パルス数、パラレルI/O21を介して入力するスイッチ14の押圧の有無、DMAコントロ−ラ22を介して得たCD−ROM15からの地図データを受け入れて、それら信号に基づいて処理を行い、車両の現在位置を算出して、それを表示プロセッサ23を介してディスプレイ17に表示させる。この車両位置の表示は、図2に示すように、すでにディスプレイ17に表示している地図上に矢印マ−ク等を重畳して表示することにより行う。これにより、ユーザは、地図上で車両の現在位置を知ることができる。メモリ25は、このような動作を実現するための処理(後述)の内容を規定するプログラムなどを格納したROMと、マイクロプロセッサ24が処理を行う場合にワ−クエリアとして使用するRAMとを含んでいる。
【0020】
以下、このように構成された現在位置算出装置10の動作について説明する。
【0021】
装置10の動作は、全般的に、車両の進行方位及び走行距離を算出する処理と、算出された進行方位及び距離から車両の現在位置を決定する処理と、得られた車両位置および方位を表示する処理との三つの処理に分けることができるため、これらについて順次説明する。
【0022】
図3に、車両の進行方位及び走行距離を算出する処理の流れを説明する。
【0023】
この処理は、一定周期、たとえば100mS毎に起動され実行されるマイクロプロセッサ24のルーチンである。
【0024】
このルーチンでは、最初、A/D変換器19から角速度センサ11の出力値を読み込む(ステップ301)。この角速度センサ11の出力値には、方位変化が出力されるので、車両の進行方向の相対的な値しか検出できない。このため、次に、A/D変換器20から地磁気センサ12の出力値を読み込み(ステップ302)、この地磁気センサ12の出力値により算出された絶対方位と角速度センサ11から出力される方位変化(角速度出力)とを用いて、車両の推定方位を決定する(ステップ303)。
【0025】
この方位の決定は、たとえば、長い時間、車速が低い時には、角速度センサの誤差が大きいので、一定時間以上車速が低い場合には、地磁気センサ方位のみを利用するという方法により行う。
【0026】
次に、車速センサ13の出力するパルス数を、0.1秒毎に、カウンタ26で計数して、その計数値を読み込む(ステップ304)。この読み込んだ値に、距離係数を乗算することで、0.1秒間に進んだ距離を求める(ステップ305)。
【0027】
次に、このようにして求められた0.1秒間あたりの走行距離値を、前回得られた値に積算して、車両の走行距離が20mとなったかどうかを調べ(ステップ306)、20mに満たない場合(ステップ306でノー(No))、今回の処理を終了して、新たな処理を開始する。
【0028】
走行距離算出処理の結果、積算された走行距離が一定距離、例えば20mとなった場合(ステップ306でイエス(Yes))、その時点での進行方向と走行距離(20m)とを出力する(ステップ307)。ステップ307では、さらに、積算距離を初期化して、新たに走行距離の積算を開始する。
【0029】
次に、算出された進行方位および走行距離に基づいて、車両の仮想現在位置を算出し、算出された仮想現在位置に基づき、車両の候補点を求める処理について説明する。
【0030】
図4に、この処理の流れを示す。
【0031】
本処理は、図3からの進行方位および走行距離が出力されるのを受けて起動され、実行されるマイクロプロセッサ24のルーチンである。すなわち、本処理は、車両が20m進む毎に起動される。
【0032】
さて、この処理では、まず、先のステップ307で出力されたセンサデータ、すなわち進行方位と走行距離とを読み込む(ステップ41)。
【0033】
ついで、マップマッチング処理を行う(ステップ42)。これは、後に詳述するように、候補点の信頼度の算出処理を含む。
【0034】
次に、このマップマッチング処理で得られた最も信頼度の高い候補点である表示候補点の信頼度より一定の値Qだけ低い信頼度の値Pを求める(ステップ43)。このPの値は、信頼度の最大値を100とした場合、40〜50程度の予め定めた値である。候補点が後述するマッチング状態かフリー状態かに応じてQの値を切り替えるようにしてもよい。その場合、フリー状態候補点の方が削除されやすくなるように、フリー状態候補点に対するQ値をマッチング状態の候補点に対するQ値に比べて高くする。
【0035】
ついで、表示候補点以外の候補点の信頼度を上記の求めたPの値と比較する(ステップ44)。その信頼度がP値以上であれば(ステップ44,No)、そのままステップ46へ移行し、P値より小さければ(ステップ44,Yes)、ステップ45へ進む。ステップ45では、当該候補(および後述する各種情報)をメモリから削除する。この削除によって、次のマップマッチング処理においてこの候補点から新たな候補点を求める処理が省略され、処理負担を軽減することができる。
【0036】
表示候補点以外のすべての候補点について、ステップ44以降の処理を繰り返して、本処理を終了する(ステップ46)。
【0037】
図5に、マップマッチング処理の詳細を示す。
【0038】
マップマッチング処理においては、まず、車両の移動量を緯度経度方向、別々に、それぞれ求める。さらに、これらの各方向における移動量を、前回の車両の候補点を求める処理で得られた車両の候補点の位置に加算して、現在車両が存在すると推定される位置である仮想現在位置(A)を求める(ステップ421)。この候補点の詳細については後述する。もし、装置の始動直後など、前回の車両の候補点を求める処理で得られた候補点が存在しない場合には、別途設定された位置を、前回得られた候補点の位置として用いて仮想現在位置(A)を求める。
【0039】
次に、得られた仮想現在位置(A)の周辺の地図の道路データを、CD−ROM15から、ドライバ16およびDMAコントローラ23を介して読み出す(ステップ422)。このとき、仮想現在位置(A)を得るために用いた候補点が道路上の候補点であれば、当該仮想現在位置(A)から距離検索範囲D内の線分であってその道路を表す線分またはこれにつながる線分を選択する。道路上の候補点でない候補点(フリー状態の候補点)の場合には、当該仮想現在位置(A)から距離検索範囲D内の線分を選択する。この際、当該仮想現在位置を得るために用いた候補点に関する信頼度(前回補正されたもの)に基づいて、道路の検索範囲Dを可変としてもよい。すなわち、信頼度の高い候補点から得た仮想現在位置に関しては、より狭い範囲内に含まれる線分を選択し、逆に信頼度の低い候補点から得た仮想現在位置に関しては、より広い範囲に含まれる線分を選択する。信頼度に基づいて、検索範囲を可変とする理由は、信頼度が小さい場合には、前回求めた現在位置の精度に対する信憑性が低いと考えられるので、より広い範囲を検索して道路を探す方が、正しい現在位置を求める上で適当であるからである。
【0040】
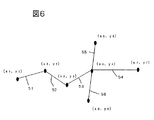
なお、前述したように、本実施例においては、道路データとして、図6に示すように、2点間を結ぶ複数の線分51ないし55で近似し、それら線分を、その始点と終点の座標によって表したものなどを用いている。たとえば、線分53は、その始点(x3、y3)と終点(x4、y4)によって表現される。
【0041】
次に、ステップ422で取り出された線分の中から、その線分の方位が、求められている進行方向と、所定値以内にある線分だけを選択し(ステップ423)、さらに、取り出されたn個すべての線分に対して、仮想現在位置(A)から垂線をおろし、その垂線L(n)の長さを求める(ステップ424)。
【0042】
次に、これら垂線の長さに基づき、ステップ423で選択されたすべての線分に対して、以下の式によりに定義されるエラーコスト値ec(n)を算出する。
【0043】
ec(n)=α×|θcar−θ(n)|+β|L(n)|
ここに、θcarは仮想現在位置(A)における車両方位、θ(n)は、線分の方位、L(n)は、仮想現在位置(A)から線分までの距離、すなわち垂線の長さ、αおよびβは、重み係数である。これら重み係数の値は、進行方向と道路の方位のずれと現在位置と道路のずれのどちらを、現在位置の属する道路を選択する上で重視するかによって変化させてよい。たとえば、進行方向と方位が近い道路を重視する場合は、αを大きくするようにする。
【0044】
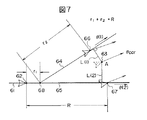
ここで、候補点につき説明を加える。装置の始動直後など、初期的な状態においては、仮想現在位置(A)は、ユーザ(運転者)がスイッチ14を用いて所定の情報を入力することなどにより、一意的に定まり、かつ、これは道路に対応する線分上に位置する。しかしながら、車両が走行した後には、ジャイロなどのセンサの誤差などにより、仮想現在位置(A)が、道路に対応する線分に存在しなくなる場合がある。その結果、たとえば、図7に示すように、道路が分岐している場合、すなわち、道路に対応する線分61の節点68から、二つの線分64および65があらわれる場合に、いずれの線分に対応する道路上に車両が存在するかを明確にすることができない場合が多い。
【0045】
したがって、このような場合に、本実施例においては、考えられ得る二つの線分上に存在する所定の点を候補点として設定し、これらの現在位置、エラーコスト、後述する累算エラーコストなどを、それぞれ、メモリ25のRAMの所定の領域に記憶するように構成されている。なお、説明を容易にするため、以下の説明においては、特に複数の候補点であることを明示しない限り、単一の候補点から、新たな一以上の候補点を生成することとする。
【0046】
ついで、算出されたエラーコストec(n)と、前回の処理で得られた候補点に関連する累算エラーコストesとにしたがって、下記の式により定義される、今回の処理における累算エラーコストes(n)を算出する(ステップ425)。
【0047】
es(n)=(1−k)×es+k×ec(n)
ここに、kは、0より大きく1より小さな重み係数である。この累算エラーコストes(n)は、前回以前の処理において算出されたエラーコストを、今回の処理において算出されるエラーコストにどのくらい反映させるかを表わしている。
【0048】
さらに、算出された累算エラーコストes(n)に基づき、下記の式に定義される信頼度trst(n)を算出する(ステップ425)。
【0049】
trst(n)=100/(1+es(n))
この式から明らかなように、累算エラーコストec(n)が大きくなるのにしたがって、信頼度trst(n)は減少し、0(ゼロ)に近づく。その一方、これが小さくなるのにしたがって、信頼度trst(n)は増大し、その値は、100に近づく。
【0050】
このような処理をすることにより、ある候補点に対する現在位置Aより所定の範囲内に存在するn個の線分に関連する信頼度trst(n)が求められる。信頼度は、このように、選択された各線分に対して算出されるものであるが、本明細書中では、便宜上、その線分上に求められる候補に対する信頼度としても扱う。
【0051】
ついで、ある候補点から、対応する線分に沿って、車両の進行した距離Rに対応する長さだけ進められた点を、新たな候補点C(n)とする(ステップ426)。したがって、ある候補点の位置する線分或いはこれに接続された線分であって、その方位と車両方位との差が所定値以下であるような線分の本数がnである場合には、n個の新たな候補点C(n)が生成されることになる。後述するフリー状態の候補点が存在する場合、候補点の位置する線分が存在せず、この候補点に対する次の候補点の算出時(ステップ422〜426)には対応する仮想現在位置から所定範囲D内のすべての線分を取り出すので、候補点の数が多くなりうる。
【0052】
最後に、これらの候補点から、最も信頼度の高い候補点を表示候補として選出し、この表示データ候補点データを出力する(ステップ427)。より具体的には、最も信頼度の値の大きな候補点Cを、表示候補点CD、すなわち、ディスプレイ17上に表示するための候補点として、その位置、累算エラーコスト、信頼度、後述するマッチング状態であるかフリー状態であるかを示す状態フラグなどを、メモリ25のRAMの所定の領域に記憶するとともに、表示候補点以外の他の候補点の位置、累算エラーコスト、信頼度、状態フラグなども、RAMの所定の領域に記憶する。
【0053】
ここで、具体的な道路を例に挙げて、マップマッチングの作用を考える。たとえば、図7に示すように、線分61上に存在したある候補点62に対して、現在位置Aが、点63に示す位置に表わされるとする。このような場合に、現在位置Aから、候補点62が位置する線分61に接続された線分であって、その方位と車両方位との差が所定値以下であるような線分64、65を取り出し、現在位置Aから、線分64、65までの距離L(1)、L(2)を算出するともに、算出された距離、線分64、65の角度θ(1)、θ(2)および車両方位θcarなどに基づき、関連するエラーコスト、累算エラーコスト、信頼度を算出する。さらに、図3のステップ307で求められた車両の走行距離Rに基づき、ある候補点62から、線分61および64、或いは、線分61および65に沿って、走行距離Rに対応する長さだけ進められた位置を算出し、この位置に対応する点を、それぞれ候補点66、67とする。
【0054】
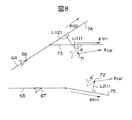
さらに、図8に示すように、線分64上の候補点66に対して、新たな現在位置Aが、点71に示す位置に表わされ、その一方、線分65上の候補点67に対して、新たな現在位置A’が、点72に示す位置に表わされるとする。この場合には、現在位置Aから、線分64に接続された線分であって、その方位と車両方位との差が所定値以下であるような線分73、74を取り出すとともに、新たな現在位置A’から、線分65に接続された線分であって、その方位と車両方位との差が所定値以下であるような線分75を取り出す。ついで、現在位置Aから、線分73、74までのそれぞれの距離L1(1)およびL1(2)を算出するともに、現在位置A’から、線分75までの距離L2(1)を算出する。さらに、現在位置Aに関連して算出された距離、線分73、74の角度θ1(1)およびθ1(2)ならびに車両方位θcarなどに基づき、関連するエラーコスト、累算エラーコストおよび信頼度を算出するとともに、現在位置A’に関連して算出された距離、線分75の角度θ2(1)および車両方位θcarなどに基づき、関連するエラーコスト、累算エラーコストおよび信頼度を算出する。
【0055】
さらに、図3のステップ307で求められた車両の走行距離Rに基づき、候補点66から、線分64および73、或いは、線分64および74に沿って、若しくは、候補点67から、線分65および75に沿って、車両の走行距離Rに対応する長さだけ進められた位置を算出し、この位置に対応する点を、それぞれ新たな候補点とする。図9は、このように新たに求められた候補点81ないし83を示している。
【0056】
ここで、候補点のマッチング状態およびフリー状態について説明する。ある線分上に位置する候補点に対する現在位置Aから、該候補点が位置する線分或いは、これに接続された線分であって、その方位と車両の進行方位との差が所定値以下であるような線分が存在しない場合が考えられる。この場合には、現在位置A自体を、当該候補点から算出された次の候補点として取り扱う。本実施例においては、このようにして得られた候補点を、フリー状態の候補点と称する。これに対して、それ以外の状態、すなわち、ある線分上に位置する候補点に対する現在位置Aから、該候補点が位置する線分或いはこれに接続された線分であって、その方位と車両の進行方位との差が所定値以下であるような線分が存在し、その結果、特定の線分上に次の候補点が存在し得る状態をマッチング状態と称する。
【0057】
また、候補点が位置する線分或いはこれに接続された線分であって、その方位と車両の進行方位との差が所定値以下であるような線分が存在しない場合に、ステップ425で算出すべきエラーコストec(n)には、マッチング状態である場合に得られるエラーコストの値よりも大きな一定の値が与えられる。
【0058】
なお、このフリー状態候補点を基に新たな候補点を求める際には、フリー状態の候補点に対する仮想現在位置そのものを新たなフリー状態の候補点とするとともに、その仮想現在位置から所定の範囲D内に、その方位と車両の進行方位との差が所定値以下の線分が存在する場合には、仮想現在位置から当該線分におろされた垂線とこの線分との交点をも、候補点とする。
【0059】
以上の説明から容易に予測されるように、マップマッチング処理を実行するための処理時間は、道路データに対応する道路の密度に依存し、特に、読み出された地図データに対応する地図が、市街地であった場合など、道路の密度が大きい場合などでは、この処理時間は、非常に大きくなる。したがって、本実施例においては、図4で前述したように、表示候補点の信頼度より所定量以上低い信頼度を有する候補点を削除することにより、処理負担を軽減し、処理時間の増大を防止することができる。候補点の削除は信頼度に基づいて行うので、マップマッチングの精度を維持しながら、処理負担の軽減を行うことができる。
【0060】
図5のステップ427で得られた表示候補点は、図10に示すフローチャートに基づく処理によりディスプレイ17の画面上に表示される。
【0061】
本処理は、1秒毎に起動され実行されるマイクロプロセッサ24のルーチンである。
【0062】
最初、スイッチ14が押圧により地図の縮尺の変更を指示されているかを、パラレルI/O21の内容を見て判断する(ステップ1301)。もし、押されていれば(ステップ1301でYes)、それに対応して、所定の縮尺フラグを設定する(ステップ1302)。
【0063】
次に、表示候補点の位置および方位を示すデータを、メモリ25のRAMの所定の領域から読み出し(ステップ1303)、ステップ1302で切り替えられた縮尺フラグの内容に応じた縮尺の地図をディスプレイ17に、例えば、図2に示すような状態で表示する(ステップ1304)。
【0064】
そして、地図に重畳して、表示候補点の位置およびその方位を、たとえば、先に示した図2のように、矢印記号“↑”を用いて表示する(ステップ1305)。そして最後に、これらに重畳して、北を示す北マークと、縮尺に対応した距離マークとを、図2のように表示する(ステップ1306)。
【0065】
なお、本実施例においては、上記のように矢印記号を用いて車両位置および方向を示したが、車両位置および方向の表示形態は、位置および進行方向が、表示状態が明確に示されるものであれば、その形態は任意でよい。また、北マーク等も同様である。
【0066】
本実施例によれば、各候補点の信頼度に基づいて、候補点を削除するようにしたので、
マップマッチング処理の信頼性を維持しながら、多大な処理時間を要する処理を減じることができ、したがって、現在位置の算出に要する処理時間を減少させることが可能となる。
【0067】
本明細書において、手段とは、必ずしも物理的手段を意味するものではなく、各手段の機能が、ソフトウエアによって実現される場合も包含する。また、一つの手段の機能が二以上の物理的手段により実現されても、二以上の手段の機能が一つの物理的手段により実現されてもよい。
【0068】
【発明の効果】
本発明によれば、マップマッチングの精度を損なうことなく、その処理負荷を軽減することができる現在位置算出装置を提供することが可能となる。
【図面の簡単な説明】
【図1】図1は、本発明の実施例にかかる現在位置算出装置の構成を示すブロックダイヤグラムである。
【図2】図2は、本実施例にかかる地図および現在位置の表示例を示す図である。
【図3】図3は、車両の進行方位および走行距離を算出する処理を示すフローチャートである。
【図4】図4は、本実施例にかかる所定走行距離毎に実行されるメイン処理を示すフローチャートである。
【図5】図5は、図4に示した1ステップ(マップマッチング処理)の詳細処理を示すフローチャートである。
【図6】図6は、本実施例にかかる道路データの一例を説明するための図である。
【図7】図7は、道路に対応する線分、仮想現在位置および候補点を説明するための図である。
【図8】図8は、道路に対応する線分、仮想現在位置および候補点を説明するための図である。
【図9】図9は、道路に対応する線分、仮想現在位置および候補点を説明するための図である。
【図10】図10は、本実施例にかかる現在位置表示処理を示すフローチャートである。
【符号の説明】
10 現在位置算出装置
11 角速度センサ
12 地磁気センサ
13 車速センサ
14 スイッチ
15 CD−ROM
16 CD−ROM読み取りドライバ
17 ディスプレイ
18 コントローラ
Claims (3)
- 車両に搭載され、該車両の現在位置を算出する現在位置算出装置であって、
車両の進行方位を検出する方位検出手段と、
車両の走行距離を算出する距離算出手段と、
道路データを格納した道路データ格納手段と、
前回算出した候補点のうち、第1の閾値以上の信頼度を有する候補点に対して、当該候補点と前記進行方位および前記走行距離から求めた相対変位とに基づいて車両の仮想現在位置を推定し、推定した仮想現在位置に対して、当該仮想現在位置を前記道路データ格納手段に格納されている道路データと照合して、道路上の現在位置の候補点をその信憑性を示す信頼度と共に算出し、信頼度の最も高い候補点を現在位置と認定するマップマッチング手段と
を備え、
当該マップマッチング手段は、
推定した仮想現在位置が道路外にあり、当該仮想現在位置に対する道路上の候補点が見つからない場合に、当該仮想現在位置をそのまま候補点として算出し、
前記仮想現在位置がそのまま候補点となった候補点に対して適用する信頼度の閾値を、前記第1の閾値よりも高い第2の閾値とすること
を特徴とする現在位置算出装置。 - 前記第1の閾値は、最も高い信頼度を有する候補点の信頼度から第1の値だけ低い信頼度であり、
前記第2の閾値は、前記最も高い信頼度を有する候補点の信頼度から前記第1の値よりも小さい第2の値だけ低い信頼度であること
を特徴とする請求項1記載の現在位置算出装置。 - 前記マップマッチング手段は、
前記仮想現在位置の周辺の道路に対する距離、およびその道路方位と車両方位との方位差に基づいて、当該道路上に求まる候補点の信頼度を算出する請求項1または2記載の現在位置算出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13953595A JP3634005B2 (ja) | 1995-06-06 | 1995-06-06 | 現在位置算出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13953595A JP3634005B2 (ja) | 1995-06-06 | 1995-06-06 | 現在位置算出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH08334346A JPH08334346A (ja) | 1996-12-17 |
| JP3634005B2 true JP3634005B2 (ja) | 2005-03-30 |
Family
ID=15247546
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP13953595A Expired - Lifetime JP3634005B2 (ja) | 1995-06-06 | 1995-06-06 | 現在位置算出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3634005B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4594785B2 (ja) * | 2005-04-08 | 2010-12-08 | クラリオン株式会社 | ナビゲーション装置 |
| JP2008268814A (ja) * | 2007-04-25 | 2008-11-06 | Hitachi Ltd | 地図表示装置 |
| JP5684039B2 (ja) * | 2011-05-02 | 2015-03-11 | 株式会社豊田中央研究所 | 存在確率分布推定装置及びプログラム |
| JP6758760B2 (ja) * | 2016-09-23 | 2020-09-23 | アルパイン株式会社 | ナビゲーション装置 |
-
1995
- 1995-06-06 JP JP13953595A patent/JP3634005B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH08334346A (ja) | 1996-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3545839B2 (ja) | 現在位置算出装置 | |
| JP3634006B2 (ja) | 現在位置算出装置 | |
| JP3634005B2 (ja) | 現在位置算出装置 | |
| JP3679450B2 (ja) | 現在位置算出装置および現在位置算出方法 | |
| JP3859743B2 (ja) | 現在位置算出装置 | |
| JP3596943B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3599422B2 (ja) | 現在位置算出装置 | |
| JP3660389B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3599420B2 (ja) | 現在位置算出装置 | |
| JP3569028B2 (ja) | 現在位置算出装置 | |
| JP3758710B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3693383B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3660392B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3764508B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3798444B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3545838B2 (ja) | 現在位置算出装置 | |
| JP3682091B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3587904B2 (ja) | 現在位置算出装置 | |
| JP3573525B2 (ja) | 現在位置算出装置 | |
| JP3596944B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3656662B2 (ja) | 現在位置算出装置 | |
| JP3545837B2 (ja) | 現在位置算出装置 | |
| JP3792270B2 (ja) | 現在位置算出システムおよび現在位置算出方法 | |
| JP3596941B2 (ja) | 現在位置算出装置 | |
| JP3679826B2 (ja) | 現在位置算出システムおよび現在位置算出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040901 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040907 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041105 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041214 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041222 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090107 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 9 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 9 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 9 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 9 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |