JP3632073B2 - 医療用磁気装置 - Google Patents
医療用磁気装置 Download PDFInfo
- Publication number
- JP3632073B2 JP3632073B2 JP2001071241A JP2001071241A JP3632073B2 JP 3632073 B2 JP3632073 B2 JP 3632073B2 JP 2001071241 A JP2001071241 A JP 2001071241A JP 2001071241 A JP2001071241 A JP 2001071241A JP 3632073 B2 JP3632073 B2 JP 3632073B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- coil
- medical
- magnetic field
- patient
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00876—Material properties magnetic
Description
【発明の属する技術分野】
この発明は、少なくとも1個以上のコイルを患者の周囲に配置し、患者の体内に磁場を発生させ、また制御することで、体内に挿入した磁力に反応する器具を誘導し、またエネルギーを与えて、診断、治療などの医療行為を行う、医療用機械器具である。
【0002】
【従来の技術】
体内の磁石を装着した医療器具を牽引するために、体表から磁石をあてるのみでは、有効な磁力を発生することは容易ではなく、また十分な磁力を与えることができても、距離の3乗に反比例する磁場の原理から、体内の管腔内の自由な位置にとどめて誘導することは、不可能に近く、これまで医療の場において実用化できなかった。
器具の誘導が容易な平行磁場を発生するためには、大型の空芯コイルを井桁状に組み合わせ、内部に患者を収容する必要があった。しかし装置全体が巨大化するため体内の器具の位置の確認に必要なX線透視装置やCTと干渉し、またコイル自体がX線を遮るために体内の器具の位置が確認できず、有効な磁場を発生するための電力も大きく、また周囲への漏れ磁束も大きいため周囲の器具への影響があり、安全性を含めて実用化が非常に難しかった。
更に通常の医療行為を施行中、磁気装置の補助が必要、またその応用が手技を促進すると考えられる場合でも、装置の汎用性がないため、検査室、検査手技、患者、また検査の一時期などの必要に応じた、容易かつ一時的な適用が難しかった。
以上のような理由から、磁気装置の医療の場での実際の応用は、現在まで不可能であった。
【0003】
【発明が解決しようとする課題】
磁気を応用した医療器材を、従来の医療器具との併用を可能又は容易とし、高度な誘導を含む磁気の有効利用を行う。また目的に応じて、装置の小型化、高効率化、低消費電力化、低漏れ磁束化を行い、実際の医療での汎用性を向上して実用可能な医療装置とする。
【0004】
【課題を解決するための手段】
上記課題を解決するために、本発明に係る医療用磁気装置においては、対象物を囲むように配置され、他の装置との干渉を防止するように互いに対向する複数の支持部材と、それぞれ支持部材に支持され、対象物内に磁場を形成し、かつ、磁束の流れを規定し磁束の漏れを減少させるように連結されている複数のコイルと、を備え、コイルの形成する磁場を制御することによって、対象物内に配置した磁性体の誘導を行うことを特徴としている。ここで、支持部材は磁性体を有することが好ましい。
少なくとも1個以上の空芯又は鉄芯コイルを、その間隔を目的にあわせて患者の体外に配置して、各コイルの通電電流の強度と位相、周波数を制御することにより、目的に応じた強度と方向、作用の磁場を患者体内に発生させ、体内に挿入した磁力に反応する器具の誘導や、診断、治療を行う。
(1)平面または曲面上に少なくとも1個以上のコイルを配置し、このコイルを対向させるまたは単独に用い、収容した患者の体内に磁場を発生させる。
(2)鉄芯コイルの目的とする磁場を発生する反対側で、他の鉄芯コイルの鉄芯と連結して、周囲への漏れ磁束を減じる。
以上のような基本的コイル配列および構造を持った装置を、単独または複合して用いることで、患者体内の磁気に反応する器材を介して医療行為を行う。
【0005】
【発明の実施の形態】
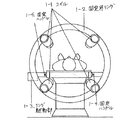
図1、2の様に、単一平面内に4個のコイル(1−1、2−1)を固定用リング(1−2、2−2)上に配列し、中心を空洞としたものを基本器具(リングA)として、2個を対向させ、2つのリングAの穴を通して患者を収容する。それぞれのコイルの組み合わせと間隔、角度を調節して、通電電流、電圧、極性、周波数、波形を制御して、患者体内に磁場を形成して、体内に挿入した器具の誘導を行い、診断、治療といった、医療行為を行う。リングAの間隔をとることで、CT装置や、X線透視装置との干渉を防止する。
リングA内のコイル数は目的にあわせて設定し、また複数の中から使用するものを選択することも可能である。たとえば図1、2の4個のコイルのうち、対向する2個のみをコイルとし、残りを1組のX線透視装置とすれば、磁力による誘導のX線透視での確認と操作が容易となり、またこの形の装置は、CアームX線透視装置のアームを延長し、コイルを装備することで製作できるため普及が容易である。平面に限らずに必要に応じて曲面上に配置することも可能である。コイル数が多ければ、より高度な制御が可能であり、反対に単純な制御であれば、1個のコイルでも可能である。
またリングAを1個単独に使用して、単純な制御を行うことも可能で、リングAを追加するなどリングAを3個以上使用することや、目的に適したコイルを補助コイルとして単独、又複数で追加することで、更に高度な制御を行う。
リングAの様にリング状、枠状としなくても、複数、又は単独のコイルを、患者周囲にたとえば自在アームを使用して配置し、それぞれのコイルの組み合わせと間隔、角度を調節し、通電電流、電圧、極性、周波数、波形を制御して、患者体内に磁場を形成して、体内に挿入した器具の誘導を行い、診断、治療といった、医療行為を行う。間隔を十分にとることで、CT装置や、X線透視装置との干渉を防止する。
コイルに磁性体を組み合わせることで、鉄芯コイルとすれば、磁場強度は5〜10倍となり、高効率化、低消費電力化が可能である。また複数のコイルの鉄芯外側を磁性体で連結した図3、4のような装置においては、患者医療行為を行う外側で鉄芯が連結されるため、周囲に対する漏れ磁束を大幅に減少させることが可能となり、結果として装置全体、部屋全体の磁気シールドを行わなくても漏れ磁束は100分の1程度まで減少する。磁気シールドを追加すれば、1000分の1〜10000分の1まで漏れ磁束は低下し、地磁気レベルまで低下させることが可能である。
医療行為の種類、目的に応じて、連結する鉄芯コイルの組み合わせを選択することで、制御能、磁場強度が向上する。例えば図5、6の様に、対向するコイルを磁性体で連結することで、一組となり制御されるコイルの組数が増えるため、それぞれを単独に制御を行うことで、患者用の空間を十分確保して、高い磁場強度、制御能、操作性の向上が可能である。
図7、8のように、鉄芯コイルの鉄芯をCリング状として、その磁極を患者に向け、患者の周囲に少なくとも一個以上を配置することで、X線透視装置等の装置を併用しつつ、患者周囲に充分な空間が確保されることにより、鉄芯コイルの存在によって医療行為が障害されずに施行可能である。また患者の体軸方向に強い磁場を発生させることが可能であり、磁気シールドを行うことで、漏れ磁束を減少させ通常の医療器具の使用が可能となる。
C型アームを単独に用いて患者を収容すれば、一軸方向への磁場を形成することが可能で、その制御およびC型磁気アームの角度、位置の調整によって、三次元的な磁場の形成が可能である。簡易な構造であるため、Cリング状の鉄芯コイルを支持装置に取り付け、回転、上下、伸縮を可能とした図9、10のごときポータブル磁界発生装置では、既存の医療器具、患者の状態、医療手技の種類、タイミングに応じて、自由に磁気装置を使用した、医療行為が可能となる。また磁気シールドを施せば、地磁気レベルまで漏れ磁束を軽減でき、磁気装置の医療領域における幅広い適応が可能である。
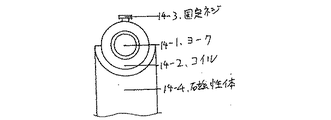
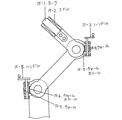
鉄芯コイルを使用することによって、その鉄芯を例えば、コイル内で、ヨークが自由に移動、伸縮可能にし、必要時にたとえば固定ネジで固定することで、図11、12の様に伸縮構造とすれば、患者体内に発生させる磁場の強度、範囲を制御しつつ、併用器具、患者、目的などに対する汎用性を向上することが可能である。また伸縮機構を、磁力を発生するヨークを、別の筒状の磁性体で収容した図13、14の様にすることで、周囲への漏れ磁束を更に軽減し、また周囲機材や医療関係者との干渉を減じ、漏れ磁束を更に低減する事が可能である。また蝶番構造でコイルをささえる図15の様なアーム型とすれば、患者に対してその距離や位置の調節もより自由度が大きく、自在アームとして患者周囲の目的の位置に目的のコイルを配置することもできる。
Cリング状の鉄芯コイルを用いた、図16のごとき磁界発生装置の磁力は、以下のごとく計算される。この際、C型の磁性体ヨークにNターンの励磁巻線を装着し、電流iで励磁するものとする。C型ヨークの磁路長をL2とし、磁界が発生する空隙部分の長さをL1、ヨークの断面積をS1、空隙部分の断面積をS2、ヨークの比透磁率をμとする。
磁気回路の考えにおいて、起磁力Vmと磁束φ、磁気抵抗(リラクタンス)Rmの関係は、
Vm=φ・Rm (1)
となるので、発生磁束φは起磁力Vmと磁気抵抗Rmから算出できる。Nターンの巻線に電流iを流しているので、起磁力はVm=Niであり、磁気抵抗はヨーク部分と空隙部分とにわけて下記のように算出される。ただしここで、μ0は真空の透磁率である。
Rm=L1/(μ0・μ・S1)+L2/(μ0・S2) (2)
これらより、ヨーク、空隙部分に発生する磁束φは、
φ=Vm/Rm=Ni/Rm (3)
と計算できる。
ゆえに、空隙部分に発生する磁界Hは
H=φ/(μ0・S2) (4)
であるから、φに(2),(3)式を代入して、以下のように計算できる。

ここに1200ターンのコイルを巻いて100Aの電流を流すと、発生磁界は約40kA/m(=約5kOe)である。この磁界が、細径のガイドワイアーに装着可能な1mm×1mm×3mmの角柱状希土類磁石に発生させる磁気トルクは、約12g・cmとなる。太径のガイドワイアーに装着可能な2.5mm×2.5mm×10mmの角柱希土類磁石では、その約20倍の磁気トルクが発生し、医療操作に十分な磁気トルクを発生させる事が可能である。
L2: C型ヨークの磁路長
S1: ヨーク断面積
S2: 空隙部分断面積
μ: ヨークの比透磁率
i: 電流
【0006】
【発明の効果】
これまでのCTやX線透視装置との併用が可能となり、患者の体の大きさ、医療手技、必要な器材による当該装置への影響も少ない。磁場の強度、発生範囲も自由に設定可能で、周囲への磁力の影響を著しく低減し、地磁気レベルとすることが可能であるため、使用や導入、適応における自由度が著しく増大する。従来の医療手技においても、必要に応じて容易に磁気応用医療器材の利用が可能となる。また高効率化で低消費電力化が可能で、非常に高い磁場強度を形成することも容易である。
これらを通して、これまで不可能であった医療領域における磁気駆動を含めた磁気装置の、実際的な適用が可能となり、新たな医療手技が開発され、更にこれまで難しかった医療手技がより容易、高精度、高効果、安全に行えるなどの高い効果がある。
【図面の簡単な説明】
【図1】単一平面内に4個のコイルを固定用リング上に配列したリングAの正面図
【図2】単一平面内に4個のコイルを固定用リング上に配列したリングAの側面図
【図3】複数のコイルの鉄芯外側を磁性体で連結した装置の正面図
【図4】複数のコイルの鉄芯外側を磁性体で連結した装置の側面図
【図5】対向した鉄芯コイルを連結した装置の側面図
【図6】対向した鉄芯コイルを連結した装置の正面図
【図7】鉄芯コイルの鉄芯をCリング状とし磁極を患者に向けた装置の正面図
【図8】鉄芯コイルの鉄芯をCリング状とし磁極を患者に向けた装置の側面図
【図9】Cリング状の鉄芯コイルを支持装置に取り付けたポータブル磁界発生装置の側面図
【図10】Cリング状の鉄芯コイルを支持装置に取り付けたポータブル磁界発生装置の正面図
【図11】コイル内のヨークを移動、伸縮可能にして固定ネジで固定した伸縮機構の断面図
【図12】コイル内のヨークを移動、伸縮可能にして固定ネジで固定した伸縮機構の正面図
【図13】磁力を発生するヨークを、別の筒状の磁性体で収容した伸縮機構の断面図
【図14】磁力を発生するヨークを、別の筒状の磁性体で収容した伸縮機構の正面図
【図15】蝶番構造でコイルをささえるアーム型位置調整機構
【図16】Cリング状鉄芯コイルの側面図
【符号の説明】
1−1 コイル 1−2 固定用リング
1−3 リング駆動部 1−4 固定ハンドル
2−1 コイル 2−2 固定用リング
2−3 リング駆動部 2−4 固定ハンドル
3−1 コイル 3−2 磁性体
4−1 コイル 4−2 磁性体
5−1 コイル 5−2 磁性体
6−1 コイル 6−2 磁性体
7−1 鉄芯コイル 8−1 鉄芯コイル
9−1 Cリング鉄芯状コイル
9−2 スパーギヤ 9−3 ピニオンギヤ
9−4 角度調整手段 9−5 スパーギヤ
9−6 ピニオンギヤ 9−7 駆動手段
9−8 スパイラルギヤ 9−9 ピニオンギヤ
9−10 ピニオンギヤ
9−11 ウォーム&ウォームホイール
9−12 ウォームホイール 9−13 ウォームギヤ
9−14 カウンターウェイト
10−1 Cリング状鉄芯コイル
10−2 スパーギヤ 10−3 ピニオンギヤ
10−4 カウンターウェイト
10−5 スパーギヤ
11−1 ヨーク 11−2 コイル
11−3 磁性体 11−4 固定ネジ
12−1 ヨーク 12−2 コイル
12−3 磁性体 12−4 固定ネジ
13−1 ヨーク 13−2 コイル
13−3 固定ネジ 13−4 磁性体
13−5 ハンドル
14−1 ヨーク 14−2 コイル
14−3 固定ネジ 14−4 磁性体
15−1 ヨーク 15−2 コイル
15−3 ハンドル 15−4 ウォーム
15−5 ウォームホイール 15−6 ウォームホイール
15−7 ウォーム 15−8 ハンドル
L1 磁界が発生する空隙部分の長さ
L2 C型ヨークの磁路長
S1 ヨーク断面積
S2 空隙部分断面積
μ ヨークの透磁率
i 電流比
N コイルの巻数
Claims (2)
- 対象物を囲むように配置され、他の装置との干渉を防止するように所定の間隔をおいて互いに対向する複数の支持部材と、
それぞれ前記支持部材に支持され、前記対象物内に磁場を形成し、かつ、磁束の流れを規定し磁束の漏れを減少させるように連結されている複数のコイルと、を備え、
前記コイルの形成する磁場を制御することによって、前記対象物内に配置した磁性体の誘導を行うことを特徴とする医療用磁気装置。 - 前記支持部材は磁性体を有する請求項1項記載の医療用磁気装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001071241A JP3632073B2 (ja) | 2001-02-07 | 2001-02-07 | 医療用磁気装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001071241A JP3632073B2 (ja) | 2001-02-07 | 2001-02-07 | 医療用磁気装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002233575A JP2002233575A (ja) | 2002-08-20 |
| JP3632073B2 true JP3632073B2 (ja) | 2005-03-23 |
Family
ID=18928993
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001071241A Expired - Fee Related JP3632073B2 (ja) | 2001-02-07 | 2001-02-07 | 医療用磁気装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3632073B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009119236A1 (ja) * | 2008-03-26 | 2009-10-01 | テルモ株式会社 | 治療装置 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4147315B2 (ja) | 2002-09-13 | 2008-09-10 | Hoya株式会社 | 磁気アンカー遠隔誘導システム |
| CN100393378C (zh) * | 2003-11-17 | 2008-06-11 | 陈克雄 | 中医全息动态平衡定点治疗机 |
| JP2005319274A (ja) * | 2004-04-06 | 2005-11-17 | Pentax Corp | 内視鏡用把持装置及び磁気アンカー遠隔誘導システム |
| US20070299550A1 (en) * | 2004-09-28 | 2007-12-27 | Osaka University | Three-Dimensional Guidance System And Method , And Drug Delivery System |
| US8232798B2 (en) * | 2005-09-08 | 2012-07-31 | Koninklijke Philips Electronics N.V. | Magnetic tracking system for an imaging system |
| JP4893626B2 (ja) * | 2005-09-30 | 2012-03-07 | 日立金属株式会社 | 磁界制御方法および磁界発生装置 |
| JP2007151605A (ja) * | 2005-11-30 | 2007-06-21 | Mitsuo Ochi | 磁気誘導装置および磁性複合体の誘導システム |
| JP4671287B2 (ja) * | 2005-12-22 | 2011-04-13 | 独立行政法人国立がん研究センター | 磁気発生装置 |
| EP2083915A2 (en) * | 2006-06-14 | 2009-08-05 | Enjoy Spol. S.R.O. | Device for attenuating cellular metabolism |
| CN100463706C (zh) * | 2007-03-30 | 2009-02-25 | 天津大学 | 磁性药物引导装置 |
| WO2010041714A1 (ja) * | 2008-10-10 | 2010-04-15 | 学校法人自治医科大学 | 内視鏡的粘膜下層剥離術(esd)用外科手術システム及び外科手術方法 |
| CN101884824A (zh) * | 2010-07-02 | 2010-11-17 | 华中科技大学 | 三维扫描式大梯度电磁引导装置 |
| CA2964459A1 (en) | 2014-10-15 | 2016-04-21 | Vincent Suzara | Magnetic field structures, field generators, navigation and imaging for untethered robotic device enabled medical procedure |
| AT517737B1 (de) * | 2015-10-02 | 2018-07-15 | Pontemed Ag | Magnetische Stimulationsvorrichtung |
| EP4134991A1 (en) * | 2016-08-10 | 2023-02-15 | IUCF-HYU (Industry-University Cooperation Foundation Hanyang University) | Magnetic tube system |
| JP6942340B2 (ja) * | 2017-08-04 | 2021-09-29 | 国立大学法人広島大学 | 磁場誘導装置 |
| KR20200143671A (ko) * | 2018-02-06 | 2020-12-24 | 스티미트 아게 | 전기 자기 유도 장치 및 표적 조직 활성화 방법 |
-
2001
- 2001-02-07 JP JP2001071241A patent/JP3632073B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009119236A1 (ja) * | 2008-03-26 | 2009-10-01 | テルモ株式会社 | 治療装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002233575A (ja) | 2002-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3632073B2 (ja) | 医療用磁気装置 | |
| JP6791928B2 (ja) | 磁気共鳴イメージングによる放射線治療のためのシステム及び方法 | |
| US6201394B1 (en) | MRI apparatus | |
| US8958864B2 (en) | Combined radiation therapy and magnetic resonance unit | |
| US6437571B1 (en) | MRI apparatus | |
| JP4826929B2 (ja) | 磁界発生装置 | |
| KR20210013563A (ko) | 자기 공명 이미징 시스템을 위한 b0 자석 방법들 및 장치들 | |
| WO2001009633A3 (en) | Magnetic resonance imaging controlled by the position of a moveable rf coil | |
| US8487269B2 (en) | Combined radiation therapy and magnetic resonance unit | |
| US20130197351A1 (en) | Beam deflection arrangement within a combined radiation therapy and magnetic resonance unit | |
| JP2000201902A (ja) | 調整可能な磁気共鳴撮像磁石 | |
| US20130046169A1 (en) | Mri-guided nanoparticle cancer therapy apparatus and methodology | |
| DK1018936T3 (da) | Magnetisk orienterbart fjernstyringssystem og fremgangsmåder til brug deraf | |
| WO1999023934A2 (en) | Articulated magnetic guidance systems and devices and methods for magnetically-assisted surgery | |
| JP2002078701A (ja) | 医用診察装置 | |
| JP2006068501A (ja) | 磁気誘導医療システム | |
| JPH11128204A (ja) | 磁気的対象をナビゲートする方法及びmr装置 | |
| JP5933567B2 (ja) | 医療機器 | |
| US20130109920A1 (en) | Arrangement and method for navigating an endoscopic capsule | |
| JP5226319B2 (ja) | 磁気粒子の空間分布を定めるための配置および方法 | |
| EP4005519A1 (en) | Magnetic drive system and microrobot control method using same | |
| KR20210124562A (ko) | 이동형 마이크로로봇 제어장치 | |
| JPH1028682A (ja) | 診断用磁気共鳴装置のための磁石装置 | |
| CN109330684A (zh) | 一种用于脑血管介入治疗的磁导航装置及磁导航方法 | |
| JP2008517673A (ja) | 画像誘導によるカニューレまたは針の挿入および抜去のための装置および方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040601 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041124 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |