JP2023094367A - ハブユニット軸受 - Google Patents
ハブユニット軸受 Download PDFInfo
- Publication number
- JP2023094367A JP2023094367A JP2021209803A JP2021209803A JP2023094367A JP 2023094367 A JP2023094367 A JP 2023094367A JP 2021209803 A JP2021209803 A JP 2021209803A JP 2021209803 A JP2021209803 A JP 2021209803A JP 2023094367 A JP2023094367 A JP 2023094367A
- Authority
- JP
- Japan
- Prior art keywords
- cap
- rib
- outer ring
- groove
- hub unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Landscapes
- Sealing Of Bearings (AREA)
- Rolling Contact Bearings (AREA)
Abstract
【課題】外輪へのキャップの圧入によるエンコーダとセンサとの間のギャップの変化を抑制可能なハブユニット軸受を提供する。【解決手段】キャップは、金属製の芯金と、合成樹脂製のキャップ本体と、を有し、キャップ本体は、全体が有底円筒状であり、円筒状の筒部と、筒部の開口を塞ぐ底板部と、を有し、芯金は、インボード側部分が筒部に結合固定され、アウトボード側部分が外輪のインボード端部に圧入嵌合され、底板部のアウトボード側面は、芯金の径方向内側に、設けられた低剛性部と、低剛性部の径方向内側に、設けられた高剛性部と、を有する。【選択図】図2
Description
本発明は、自動車の車輪を懸架装置に対して回転自在に支持するために使用されるハブユニット軸受に関する。
自動車の車輪(従動輪)を懸架装置に対して回転自在に支持するハブユニット軸受に、ABS等の制御に必要な車輪の回転速度を検出する為の回転速度検出装置を組み合わせて成る、回転速度検出装置付のハブユニット軸受が、従来から広く使用されている。
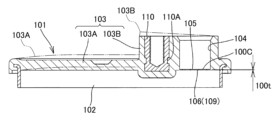
図13は、特許文献1に記載された、センサホルダ部を有するキャップを備えたハブユニット軸受の縦断面図である。図14は、特許文献1に記載された、センサホルダ部を有するキャップに磁気センサを装着した状態を示す縦断面斜視図である。図15は、特許文献1に記載された、センサホルダ部を有するキャップの断面図を示す。
図13に示すように、特許文献1のハブユニット軸受111は、外周面に内輪軌道面112Aが形成された内輪112と、内周面に外輪軌道面113Aが形成された外輪113と、内輪軌道面112A及び外輪軌道面113A間を転動する転動体114,114を有する軸受を有する。また、ハブユニット軸受111は、上記軸受のインボード側に位置して支持部材117により内輪112に固定された、N極とS極を一定間隔で周方向に交互に並べてなる磁気エンコーダ116と、磁気エンコーダ116の磁極に対向して磁気エンコーダ116の回転を検知する磁気センサ100Aと、上記軸受のアウトボード側に配置したシール部材115と、を備える。
また、ハブユニット軸受111は、上記軸受のインボード側を密封するように外輪113に取り付けられるキャップ101を備え、キャップ101は、磁気センサ100Aを保持するセンサホルダ部103Bを有する。
図13~図15に示すように、キャップ101は、外輪113に圧入される、鋼板を円筒状に成形した芯金102と、合成樹脂製のキャップ本体103と、からなる。キャップ本体103は、芯金102と外周部が結合された本体部103Aと、磁気センサ100Aを取り付けるための取付ボルト100Bが螺合するインサートナット110を保持するとともに、磁気センサ100Aが挿入されるセンサ取付穴104が形成されたセンサホルダ部103Bと、を有する。
また、キャップ101は、磁気センサ100Aを保持した状態で、磁気センサ100Aに対向する樹脂面105及びその裏面106により形成される厚さ100tの仕切壁100Cを隔てて、磁気センサ100Aが磁気エンコーダ116に対向し、磁気センサ100Aに対向する樹脂面105の裏面106は、中間品の盛上げ部が除去加工された除去加工部109である。ここで、キャップ101は射出成形品であり、芯金102及びナット110がインサート品である。なお、ナット110の周溝110Aに合成樹脂が入り込んでいるので、ナット110の抜け止めがされる。
磁気センサ100Aがキャップ101を貫通するか貫通しないかに関係なく、樹脂製のキャップ101は通常、本体部103A(底板部)の中央付近にゲートが設けられた固定型と可動型とを組み合わせてなるキャビティ内に、溶融樹脂を注入してアキシアルドロー成形が行われる。ゲートから注入された溶融樹脂が全体に回りやすいように、また、成形品の肉厚をなるべく一定にしてひけを防ぎつつ強度を持たせる為に、キャップ101のアウトボード側面(軸受内部空間側)には、リブが設けられることがある。
溶融樹脂の成型収縮量は、芯金102の温度変化(線膨張係数)による収縮より大きいので、上記工程で成形されたキャップ101の本体部103Aは全周で芯金102から径方向に引っ張られ、比較的平坦になる。しかし、キャップ101を外輪113の内周に圧入すると芯金102が収縮し、全周で芯金102から径方向内側に押される様になり、図16に二点鎖線で示す様に、キャップ101の本体部103Aは軸方向内側(インボード側)から見て、凸面になる。なお、不図示であるが、キャップ101の本体部103Aは、凹面になる場合もある。
キャップ101の変形は、剛性が高いセンサホルダ部103B付近の変形は比較的の少ないものの、本体部103Aが凸面になると磁気エンコーダ116と磁気センサ100A間のギャップが拡大し、磁束信号が弱まり、センサ出力精度が低下する虞がある。また、本体部103Aが凹面になると、磁気エンコーダ116と磁気センサ100Aが接触し、破損の虞がある。
本発明は、上述の様な事情に鑑み、外輪へのキャップの圧入によるエンコーダとセンサとの間のギャップの変化を抑制可能なハブユニット軸受を提供することを目的とする。
本発明の上記目的は、以下の構成によって達成される。
(1) 内周面に複列の外輪軌道面が形成された外輪と、
外周面に複列の内輪軌道面が形成された内輪と、
前記複列の内輪軌道面と、前記複列の外輪軌道面と、の間に転動自在に配置された複数の転動体と、
前記外輪のインボード側端部に固定され、前記外輪のインボード側の開口を塞ぐキャップと、
を備えるハブユニット軸受であって、
前記キャップは、金属製の芯金と、合成樹脂製のキャップ本体と、を有し、
前記キャップ本体は、全体が有底円筒状であり、円筒状の筒部と、前記筒部の開口を塞ぐ底板部と、を有し、
前記芯金は、インボード側部分が前記筒部に結合固定され、アウトボード側部分が前記外輪のインボード端部に圧入嵌合され、
前記底板部のアウトボード側面は、
前記芯金の径方向内側に、設けられた低剛性部と、
前記低剛性部の径方向内側に、設けられた高剛性部と、
を有する、
ハブユニット軸受。
(2) 前記低剛性部は、全周にわたって凹設された溝部であり、
前記高剛性部は、凸設されたリブである、
(1)に記載のハブユニット軸受。
(3) 前記リブは、前記溝部によって切断され、前記芯金とは接続していない、
(2)に記載のハブユニット軸受。
(4) 前記溝部の軸方向寸法は径方向寸法よりも大きい、
(2)又は(3)に記載のハブユニット軸受。
(5) 前記リブは、
互いに径方向に離間して同心に配置され、それぞれ周方向に延びる複数の周方向リブと、
径方向に隣り合う前記周方向リブを接続するように、径方向に延びる径方向リブと、
を含み、
隣り合う前記周方向リブ及び前記径方向リブの間には、凹設されたリブ溝が画定され、
前記溝部の軸方向寸法は、前記リブ溝の軸方向寸法よりも大きい
(2)~(4)のいずれか1つに記載のハブユニット軸受。
(1) 内周面に複列の外輪軌道面が形成された外輪と、
外周面に複列の内輪軌道面が形成された内輪と、
前記複列の内輪軌道面と、前記複列の外輪軌道面と、の間に転動自在に配置された複数の転動体と、
前記外輪のインボード側端部に固定され、前記外輪のインボード側の開口を塞ぐキャップと、
を備えるハブユニット軸受であって、
前記キャップは、金属製の芯金と、合成樹脂製のキャップ本体と、を有し、
前記キャップ本体は、全体が有底円筒状であり、円筒状の筒部と、前記筒部の開口を塞ぐ底板部と、を有し、
前記芯金は、インボード側部分が前記筒部に結合固定され、アウトボード側部分が前記外輪のインボード端部に圧入嵌合され、
前記底板部のアウトボード側面は、
前記芯金の径方向内側に、設けられた低剛性部と、
前記低剛性部の径方向内側に、設けられた高剛性部と、
を有する、
ハブユニット軸受。
(2) 前記低剛性部は、全周にわたって凹設された溝部であり、
前記高剛性部は、凸設されたリブである、
(1)に記載のハブユニット軸受。
(3) 前記リブは、前記溝部によって切断され、前記芯金とは接続していない、
(2)に記載のハブユニット軸受。
(4) 前記溝部の軸方向寸法は径方向寸法よりも大きい、
(2)又は(3)に記載のハブユニット軸受。
(5) 前記リブは、
互いに径方向に離間して同心に配置され、それぞれ周方向に延びる複数の周方向リブと、
径方向に隣り合う前記周方向リブを接続するように、径方向に延びる径方向リブと、
を含み、
隣り合う前記周方向リブ及び前記径方向リブの間には、凹設されたリブ溝が画定され、
前記溝部の軸方向寸法は、前記リブ溝の軸方向寸法よりも大きい
(2)~(4)のいずれか1つに記載のハブユニット軸受。
本発明のハブユニット軸受によれば、外輪へのキャップの圧入によるエンコーダとセンサとの間のギャップの変化を抑制可能なハブユニット軸受を提供できる。
[第一実施形態]
本発明の第一実施形態に係るハブユニット軸受について、図1~図3を用いて詳細に説明する。図1は、第一実施形態に係るハブユニット軸受の断面図である。図2は、第一実施形態に係るキャップの断面図である。図3は、第一実施形態に係るキャップのアウトボード側面の要部拡大図である。
本発明の第一実施形態に係るハブユニット軸受について、図1~図3を用いて詳細に説明する。図1は、第一実施形態に係るハブユニット軸受の断面図である。図2は、第一実施形態に係るキャップの断面図である。図3は、第一実施形態に係るキャップのアウトボード側面の要部拡大図である。
なお、ハブユニット軸受に関して、本明細書及び特許請求の範囲の全体で、軸方向に関して「外」とは、自動車への組み付け状態で車体の幅方向外側となる、図1の左側を言い、「アウトボード側」とも称す。また、反対に車体の幅方向中央側となる、図1の右側を、軸方向に関して「内」と言い、「インボード側」とも称す。
本実施形態のハブユニット軸受1は、従動輪用であり、外輪2と、内輪3と、複数の転動体4、4と、を主に備える。
外輪2は、外周面に静止側フランジ7を、内周面に複列(2列)の外輪軌道面8a、8bを、それぞれ有している。外輪2は、使用時に、静止側フランジ7を、懸架装置のナックルに結合固定する事により、この懸架装置に支持された状態で回転しない。
内輪3は、ハブ輪9と内輪部材10とにより構成されており、外輪2の径方向内側に外輪2と同軸(同芯)に配置されている。
ハブ輪9には、外輪2の軸方向外側(アウトボード側)開口から軸方向外方に突出した部分に、径方向外側に延出して、車輪(駆動輪)及びディスクロータ等の制動用回転部材を支持固定するための円輪状の回転側フランジ11が設けられている。具体的に、回転側フランジ11には複数の挿通孔11aが設けられ、各挿通孔11aには、ハブボルト17がセレーション嵌合されている。なお、回転側フランジ11の複数の挿通孔11aを雌ねじ孔とし、ハブボルトを螺合することで、車輪(駆動輪)及びディスクロータ等の制動用回転部材を支持固定することもできる。
また、ハブ輪9の外周面のうち、外輪2の軸方向外側(アウトボード側)列の外輪軌道面8aと対向する部分には、アウトボード側列(一方の列)の内輪軌道面12aが設けられている。また、ハブ輪9の外周面のうち、外輪2の軸方向内側(インボード側)列の外輪軌道面8bと対向する軸方向内端部には、小径段部13が設けられている。
内輪部材10の外周面には、インボード側列(他方の列)の内輪軌道面12bが設けられている。内輪部材10は、そのアウトボード側端面を小径段部13の段差面に突き当てた状態でハブ輪9の小径段部13の外周面に外嵌されると共に、そのインボード側端面が加締め部24によって結合固定されることで、ハブ輪9に固定されている。
転動体4、4は、アウトボード側列の外輪軌道面8aと内輪軌道面12aとの間部分、及び、インボード列の外輪軌道面8bと内輪軌道面12bとの間部分に、1対の保持器6,6により保持された状態で転動自在に設けられている。
外輪2の内周面のアウトボード側端部には、シールリング5が支持固定されている。シールリング5は、外輪2の内周面とハブ輪9の外周面との間に存在する、複数の転動体4、4が設けられた内部空間18の軸方向外端開口を塞いでいる。シールリング5は、ハブ輪9の外周面のうち、内輪軌道面12aのアウトボード側の大径段部20に摺接する。
内輪部材10のインボード側端部には、円環状のエンコーダ14が支持固定されている。エンコーダ14は、支持環26と、エンコーダ本体27と、から構成されている。支持環26は、SUS430等のフェライト系ステンレス鋼板やSPCC等の圧延鋼板など、磁性体の金属板に、プレス加工を施す事により、断面L字形で全体を円環状に形成されている。支持環26のアウトボード側部分が、内輪部材10に外嵌固定されている。エンコーダ本体27は、フェライト粉末等の磁性体をゴムや熱可塑性樹脂に混入してなる永久磁石により全体を円輪状に造られたもので、支持環26のインボード側面に添着固定されている。エンコーダ本体27のインボード側面(被検出面)には、S極とN極が円周方向に関して交互に且つ等ピッチで着磁されている。
外輪2のインボード端部には、外輪2のインボード側の開口を塞ぐ、有底円筒状のキャップ30が固定される。
キャップ30は、金属製の芯金40と、合成樹脂製のキャップ本体50と、を有する。
キャップ本体50は、合成樹脂を射出成形(アキシャルドロー成形)する事により、全体が有底円筒状に造られており、円筒状の筒部51と、筒部51の軸方向を向く開口を塞ぐ底板部53と、を備えている。
キャップ本体50を構成する合成樹脂材としては、例えばポリアミド66樹脂に、繊維状の強化材として、グラスファイバー、カーボンファイバー、或いは金属繊維を複合させた繊維強化ポリアミド樹脂材料を使用している。又、必要に応じて、ポリアミド樹脂に、非晶性芳香族ポリアミド樹脂(変性ポリアミド6T/6I)、低吸水脂肪族ポリアミド樹脂(ポリアミド11樹脂、ポリアミド12樹脂、ポリアミド610樹脂、ポリアミド612樹脂)を適宜加える事で、より耐水性を向上させても良い。
芯金40は、ステンレス鋼板や圧延鋼板等の金属から造られており、断面L字形で、全体が円環状に形成されている。芯金40のアウトボード側部分は、外輪2の内周面のインボード側端部に圧入嵌合される。また、芯金40のインボード側部分は、筒部51に結合固定されている。すなわち、芯金40のインボード側端部から径方向外側に折り曲がるように設けられたフランジ部は、キャップ本体50の筒部51の内部にモールド固定されている。
筒部51のアウトボード側面の径方向外側端部には、アウトボード側に突出する凸部51aが全周にわたって設けられる。凸部51aと芯金40との径方向における間には、Oリング(不図示)を係止するための係止溝51bが設けられる。
底板部53は、全体が略円板状に構成されている。底板部53の中心軸よりも径方向外側にずれた位置には、他の部分よりも軸方向の肉厚が大きくなった(軸方向両側に向けて膨出した)厚肉部55が設けられている。
厚肉部55は、エンコーダ本体27の被検出面と軸方向に対向する部分に、厚肉部55を軸方向に貫通する挿入孔57が設けられている。挿入孔57は、センサ(不図示であるが図13及び図14の磁気センサ100Aと同等のもの)を挿入する為のもので、挿入孔57の内周面は、センサの外径寸法よりも僅かに大きい内径寸法を有している。
厚肉部55の径方向内側部には、インサートナット59がモールド固定されている。インサートナット59は、アウトボード端部に底部を設けた有底円筒状の袋ナットであり、内周面に雌ねじが形成されている。そして、センサを挿入孔57内に挿入した状態で、センサのフランジ部に設けられた固定孔を貫通するボルト(不図示)をインサートナット59に螺合することで、センサは挿入孔57内に固定される。
底板部53のアウトボード側面は、芯金40の径方向内側に全周にわたって凹設された溝部61と、溝部61の径方向内側に凸設されたリブ63と、を有する。
溝部61は、芯金40から径方向内側に離れた位置に設けられている。溝部61は、底板部53のアウトボード側面からインボード側に向かって凹設されており、その軸方向寸法Dは、径方向寸法R(図3参照)よりも大きい(D>R)。これにより、芯金40の収縮をより吸収できる。
リブ63は、周方向に延びる周方向リブ63aと、径方向に延びる径方向リブ63bと、を含む。本実施形態のリブ63は、互いに径方向に離間して同心に配置された複数の周方向リブ63aと、径方向に隣り合う周方向リブ63a同士を接続する複数の径方向リブ63bと、を備える。
隣り合う周方向リブ63a及び径方向リブ63bの間には、インボード側に向かう凹溝であるリブ溝65が画定される。本実施形態においては、リブ溝65の軸方向寸法dよりも溝部61の軸方向寸法Dが大きく設定されている(d<D)。これにより、芯金40の収縮を、溝部61でより多く吸収できる。
さらに、本実施形態においては、複数の周方向リブ63aのうち、最も径方向外側に位置する周方向リブ63aが、溝部61と径方向において接続する(隣接する)。すなわち、リブ63は、溝部61によって切断され、径方向外側に位置する芯金40とは接続していない。
このように、キャップ30は、径方向内側から径方向外側に向かって順に、リブ63による高剛性部、溝部61による低剛性部、芯金40による高剛性部を有することになる。したがって、キャップ30を外輪2の内周面に圧入した際に芯金40が収縮したとしても、リブ63による高剛性部が収縮せず、溝部61の径方向の収縮によって吸収する構造とすることができる。この結果、外輪2へのキャップ30の圧入によるエンコーダ14とセンサとの間のギャップの変化を抑制可能である。
[第一実施形態の変形例]
図4は、第一実施形態の変形例に係るキャップの断面図である。
図4は、第一実施形態の変形例に係るキャップの断面図である。
本実施形態においては、リブ溝65の軸方向寸法dは、溝部61の軸方向寸法Dと略等しい。したがって、底板部53のうち溝部61が形成された部分の肉厚が、第一実施形態と比べて厚くなるので、外輪2へのキャップ30の圧入による収縮を溝部61の径方向の収縮により吸収する効果は低下するものの、成形時にゲートをキャップ30の中心側へ設けた場合の、キャップ30の径方向外側の成形性を向上させることができる。
[第二実施形態]
図5は、第二実施形態に係るキャップの断面図である。図6は、第二実施形態に係るキャップのアウトボード側面の要部拡大図である。
図5は、第二実施形態に係るキャップの断面図である。図6は、第二実施形態に係るキャップのアウトボード側面の要部拡大図である。
本実施形態においては、複数の周方向リブ63aのうち最も径方向外側に位置する周方向リブ63aが溝部61と径方向において接続しておらず(隣接しておらず)、代わりに径方向リブ63bが溝部61と径方向において接続している。この構造においても、リブ63は、溝部61によって切断され、径方向外側に位置する芯金40とは接続していない。
本実施形態では、径方向リブ63bを溝部61の内径まで設けることにより、キャップ30の成形性を維持し、リブ63による高剛性部の剛性をある程度維持しつつ、射出成形後のキャップ30の移動型からの離脱性を高めている。
すなわち、射出成形は固定型と移動型を組み合わせてなるキャビティ内に固定型に設けられたゲート(図5において符号Gで示された台形部分)から溶融樹脂を注入して行なわれる。樹脂には成形収縮があるため、成形品は移動型の外面部に係止された状態で固定型から抜かれ、移動型の移動に伴い突出するエジェクターピンに押されることで、移動型から離脱する。成形品と移動型の係止力は、径が大きいため成形収縮量が多く、また図1~図4の例の場合は、周方向距離の大きい径方向外側の周方向リブ63aの移動型との接触面積が増大して離脱時の離脱抵抗が高くなるので、エジェクターピンの押圧力が高くなり、成形品の変形の虞がある。
これに対し、本実施形態では最も外側の周方向リブ63aをなくしているので、移動型との接触面積が減少し、エジェクターピンの押圧力を下げることが出来、成形品の変形を抑制することができる。
[第二実施形態の変形例]
図7は、第二実施形態の変形例に係るキャップの断面図である。図8は、第二実施形態の変形例に係るキャップのアウトボード側面の要部拡大図である。
図7は、第二実施形態の変形例に係るキャップの断面図である。図8は、第二実施形態の変形例に係るキャップのアウトボード側面の要部拡大図である。
本実施形態においては、リブ溝65の軸方向寸法dは、溝部61の軸方向寸法Dと略等しい。したがって、底板部53のうち溝部61が形成された部分の肉厚が、第二実施形態と比べて厚くなるので、外輪2へのキャップ30の圧入による収縮を溝部61の径方向の収縮により吸収する効果は低下するものの、成形時にゲートをキャップ30の中心側へ設けた場合の、キャップ30の径方向外側の成形性を向上させることができる。
[第三実施形態]
図9は、第三実施形態に係るキャップの断面図である。図10は、第三実施形態に係るキャップのアウトボード側面の要部拡大図である。
図9は、第三実施形態に係るキャップの断面図である。図10は、第三実施形態に係るキャップのアウトボード側面の要部拡大図である。
本実施形態においては、第二実施形態(図5~図6参照)における溝部61と接続する径方向リブ63bをなくした形状とされている。したがって、最も外側の周方向リブ63aと、溝部61と、の間には、第二の溝部67が形成される。この構造においても、リブ63は、溝部61及び第二の溝部67によって切断され、径方向外側に位置する芯金40とは接続していない。ここで、溝部61の軸方向寸法Dは第二の溝部67の軸方向寸法Lよりも大きく(D>L)、第二の溝部67の軸方向寸法Lはリブ溝65の軸方向寸法dと略等しい。
本実施形態によれば、第二実施形態に比べて、最も外側の径方向リブ63bをなくしているので、エジェクターピンの押圧力を下げることが出来、成形品の変形を抑制することができる。
[第三実施形態の変形例]
図11は、第三実施形態の変形例に係るキャップの断面図である。図12は、第三実施形態の変形例に係るキャップのアウトボード側面の要部拡大図である。
図11は、第三実施形態の変形例に係るキャップの断面図である。図12は、第三実施形態の変形例に係るキャップのアウトボード側面の要部拡大図である。
本実施形態においては、リブ溝65の軸方向寸法dは、溝部61の軸方向寸法Dと略等しい。さらに、溝部61の軸方向寸法Dは、第二の溝部67の軸方向寸法Lと略等しい。したがって、溝部61と第二の溝部67とは径方向に滑らかに接続して一体的に形成される。
このような構成においては、底板部53のうち溝部61が形成された部分の肉厚が、第三実施形態と比べて厚くなるので、外輪2へのキャップ30の圧入による収縮を溝部61の径方向の収縮により吸収する効果は低下するものの、成形時にゲートをキャップ30の中心側へ設けた場合の、キャップ30の径方向外側の成形性を向上させることができる。
尚、本発明は、上述した実施形態に限定されるものでなく、適宜、変形及び改良が可能である。
例えば、上述した実施形態においては、センサを挿入するための挿入孔57は厚肉部55を貫通する貫通孔として説明したが、挿入孔57は非貫通であっても構わない。
また、キャップ30は、必ずしもセンサを支持する機能を有さなくてもよく、例えば、キャップ30端面の軸方向位置を保証したい場合にも、本願発明は好適である。
1 ハブユニット軸受
2 外輪
3 内輪
4 転動体
5 シールリング
6 保持器
7 静止側フランジ
8a、8b 外輪軌道面
9 ハブ輪
10 内輪部材
11 回転側フランジ
12a、12b 内輪軌道面
13 小径段部
14 エンコーダ
18 内部空間
20 大径段部
24 加締め部
26 支持環
27 エンコーダ本体
30 キャップ
40 芯金
50 キャップ本体
51 筒部
51a 凸部
51b 係止溝
53 底板部
55 厚肉部
57 挿入孔
59 インサートナット
61 溝部
63 リブ
63a 周方向リブ
63b 径方向リブ
65 リブ溝
67 溝部
2 外輪
3 内輪
4 転動体
5 シールリング
6 保持器
7 静止側フランジ
8a、8b 外輪軌道面
9 ハブ輪
10 内輪部材
11 回転側フランジ
12a、12b 内輪軌道面
13 小径段部
14 エンコーダ
18 内部空間
20 大径段部
24 加締め部
26 支持環
27 エンコーダ本体
30 キャップ
40 芯金
50 キャップ本体
51 筒部
51a 凸部
51b 係止溝
53 底板部
55 厚肉部
57 挿入孔
59 インサートナット
61 溝部
63 リブ
63a 周方向リブ
63b 径方向リブ
65 リブ溝
67 溝部
Claims (5)
- 内周面に複列の外輪軌道面が形成された外輪と、
外周面に複列の内輪軌道面が形成された内輪と、
前記複列の内輪軌道面と、前記複列の外輪軌道面と、の間に転動自在に配置された複数の転動体と、
前記外輪のインボード側端部に固定され、前記外輪のインボード側の開口を塞ぐキャップと、
を備えるハブユニット軸受であって、
前記キャップは、金属製の芯金と、合成樹脂製のキャップ本体と、を有し、
前記キャップ本体は、全体が有底円筒状であり、円筒状の筒部と、前記筒部の開口を塞ぐ底板部と、を有し、
前記芯金は、インボード側部分が前記筒部に結合固定され、アウトボード側部分が前記外輪のインボード端部に圧入嵌合され、
前記底板部のアウトボード側面は、
前記芯金の径方向内側に、設けられた低剛性部と、
前記低剛性部の径方向内側に、設けられた高剛性部と、
を有する、
ハブユニット軸受。 - 前記低剛性部は、全周にわたって凹設された溝部であり、
前記高剛性部は、凸設されたリブである、
請求項1に記載のハブユニット軸受。 - 前記リブは、前記溝部によって切断され、前記芯金とは接続していない、
請求項2に記載のハブユニット軸受。 - 前記溝部の軸方向寸法は径方向寸法よりも大きい、
請求項2又は3に記載のハブユニット軸受。 - 前記リブは、
互いに径方向に離間して同心に配置され、それぞれ周方向に延びる複数の周方向リブと、
径方向に隣り合う前記周方向リブを接続するように、径方向に延びる径方向リブと、
を含み、
隣り合う前記周方向リブ及び前記径方向リブの間には、凹設されたリブ溝が画定され、
前記溝部の軸方向寸法は、前記リブ溝の軸方向寸法よりも大きい
請求項2~4のいずれか1項に記載のハブユニット軸受。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021209803A JP2023094367A (ja) | 2021-12-23 | 2021-12-23 | ハブユニット軸受 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021209803A JP2023094367A (ja) | 2021-12-23 | 2021-12-23 | ハブユニット軸受 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2023094367A true JP2023094367A (ja) | 2023-07-05 |
Family
ID=87001416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021209803A Pending JP2023094367A (ja) | 2021-12-23 | 2021-12-23 | ハブユニット軸受 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2023094367A (ja) |
-
2021
- 2021-12-23 JP JP2021209803A patent/JP2023094367A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012014622A1 (ja) | 自動二輪車の車輪支持構造 | |
| CN100497974C (zh) | 具有转速检测装置的滚动轴承单元 | |
| US9784319B2 (en) | Rolling bearing unit with rotational speed detecting device | |
| WO2017150562A1 (ja) | 車輪用軸受装置 | |
| JP5115967B2 (ja) | 回転速度検出装置付き車輪用軸受装置 | |
| JP2023094367A (ja) | ハブユニット軸受 | |
| JP2003013982A (ja) | エンコーダ付軸受ユニット | |
| JP2006275200A (ja) | 転がり軸受装置のカバー及びこれを用いた転がり軸受装置 | |
| CN116802410A (zh) | 配备有带沟槽和双急转弯的密封装置的车轮轴承 | |
| JP2024007913A (ja) | ハブユニット軸受 | |
| JP2023139836A (ja) | 従動輪用加締めハブユニット軸受 | |
| JP4829683B2 (ja) | 車輪用軸受装置 | |
| JP4628395B2 (ja) | 回転速度検出装置付き車輪用軸受装置 | |
| JP2006064145A (ja) | 車輪用軸受装置 | |
| JPH07317753A (ja) | 車輪用軸受ユニット | |
| JP2024013043A (ja) | ハブユニット軸受 | |
| JP2004044664A (ja) | 転がり軸受ユニット | |
| JP7327103B2 (ja) | アンギュラ玉軸受用保持器及びアンギュラ玉軸受 | |
| JP2023029119A (ja) | 車輪用軸受装置 | |
| JP2024013044A (ja) | ハブユニット軸受 | |
| JP2023011383A (ja) | ハブユニット軸受 | |
| JP2018076875A (ja) | 軸受キャップ及び転がり軸受ユニット | |
| JP2023072403A (ja) | 保持器及びハブユニット軸受 | |
| WO2024053511A1 (ja) | 車輪用軸受装置 | |
| US20220099139A1 (en) | Sensor bearing unit |