JP2020184836A - 固定子およびモータ - Google Patents
固定子およびモータ Download PDFInfo
- Publication number
- JP2020184836A JP2020184836A JP2019088270A JP2019088270A JP2020184836A JP 2020184836 A JP2020184836 A JP 2020184836A JP 2019088270 A JP2019088270 A JP 2019088270A JP 2019088270 A JP2019088270 A JP 2019088270A JP 2020184836 A JP2020184836 A JP 2020184836A
- Authority
- JP
- Japan
- Prior art keywords
- stator
- magnetic strips
- inner diameter
- magnetic
- small
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/02—Details of the magnetic circuit characterised by the magnetic material
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/16—Stator cores with slots for windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/03—Machines characterised by aspects of the air-gap between rotor and stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
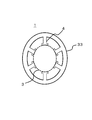
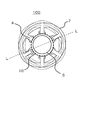
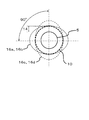
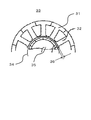
【解決手段】モータ100は、回転子5と、固定子7とを含む。固定子7は、複数のティース部4を備えた磁性薄帯1が複数積層されて形成されている。磁性薄帯1は、複数のティース部4の先端部分に沿って形成された楕円形状の内径部3を有する。積層された磁性薄帯1のうち、少なくとも1つの磁性薄帯が、他の磁性薄帯に対して水平方向に所定角度ずれており、かつ、積層された磁性薄帯1の全てのティース部4の位置が一致している。
【選択図】図2
Description
2 積層体
3 磁性薄帯の内径部
4、32 ティース部
5、35 回転子
7、33、33a 固定子
10、34、34a 固定子の内径部
14、36 エアギャップ
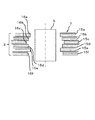
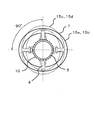
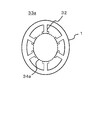
15a、15b、15c、15d、15e、15f 小積層体
16a、16b、16c、16d、16e、16f 小積層体の内径部
31 電磁鋼板
Claims (7)
- 複数のティース部を備えた磁性薄帯が複数積層された固定子であって、
前記磁性薄帯は、
前記複数のティース部の先端部分に沿って形成された楕円形状の内径部を有し、
積層された前記磁性薄帯のうち、少なくとも1つの磁性薄帯が、他の磁性薄帯に対して水平方向に所定角度ずれており、かつ、積層された前記磁性薄帯の全ての前記ティース部の位置が一致している、
固定子。 - 積層された前記磁性薄帯は、前記磁性薄帯を水平方向に前記所定角度ずらさずに積層させた複数の小積層体に分けられ、
前記複数の小積層体のうち、少なくとも1つの小積層体が、他の小積層体に対して水平方向に所定角度ずれており、かつ、積層された前記磁性薄帯の全ての前記ティース部の位置が一致している、
請求項1に記載の固定子。 - 前記小積層体1つあたりの厚みは、0.06mm以上である、
請求項2に記載の固定子。 - 前記所定角度は、互いに隣り合う前記ティース部の為す角度、または、互いに隣り合う前記ティース部の為す角度の整数倍の角度である、
請求項1から3のいずれか1項に記載の固定子。 - 前記磁性薄帯は、非晶質薄帯またはナノ結晶薄帯である、
請求項1から4のいずれか1項に記載の固定子。 - 前記磁性薄帯の1つあたりの厚みは、0.01乃至0.06mmである、
請求項1から5のいずれか1項に記載の固定子。 - 請求項1から6のいずれか1項に記載の固定子と、
回転子と、を含む、
モータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019088270A JP7209260B2 (ja) | 2019-05-08 | 2019-05-08 | 固定子およびモータ |
| US16/836,950 US11601021B2 (en) | 2019-05-08 | 2020-04-01 | Stator and motor |
| CN202010252648.3A CN111917198B (zh) | 2019-05-08 | 2020-04-01 | 定子以及马达 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019088270A JP7209260B2 (ja) | 2019-05-08 | 2019-05-08 | 固定子およびモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020184836A true JP2020184836A (ja) | 2020-11-12 |
| JP7209260B2 JP7209260B2 (ja) | 2023-01-20 |
Family
ID=73045578
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019088270A Active JP7209260B2 (ja) | 2019-05-08 | 2019-05-08 | 固定子およびモータ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11601021B2 (ja) |
| JP (1) | JP7209260B2 (ja) |
| CN (1) | CN111917198B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2023139637A1 (ja) * | 2022-01-18 | 2023-07-27 | ||
| JP2024122001A (ja) * | 2023-02-28 | 2024-09-09 | トヨタ自動車株式会社 | 回転機 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3785329A4 (en) * | 2018-04-25 | 2022-01-12 | PPC Broadband, Inc. | COAXIAL CABLE CONNECTORS HAVING A GROUNDED PORT |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007174827A (ja) * | 2005-12-22 | 2007-07-05 | Nissan Motor Co Ltd | 電動機の固定子構造 |
| JP2009112096A (ja) * | 2007-10-29 | 2009-05-21 | Toyota Industries Corp | ステータコアの固定方法および電動圧縮機 |
| JP2018093704A (ja) * | 2016-12-06 | 2018-06-14 | パナソニック株式会社 | 鉄心およびモータ |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5334894A (en) * | 1991-05-14 | 1994-08-02 | Shinko Electric Co., Ltd. | Rotary pulse motor |
| JP3678102B2 (ja) | 2000-02-02 | 2005-08-03 | 株式会社日立製作所 | 電動機 |
| JP2003304655A (ja) * | 2002-04-10 | 2003-10-24 | Nippon Steel Corp | 回転電機のステータ鉄心構造 |
| JP3938726B2 (ja) * | 2002-07-12 | 2007-06-27 | 株式会社日立産機システム | 永久磁石式回転電機およびそれを用いた圧縮機 |
| CN101375484A (zh) * | 2006-01-24 | 2009-02-25 | 株式会社安川电机 | 电动机定子的分裂铁芯、电动机定子、永磁式同步电动机以及利用分裂铁芯冲压模的冲压方法 |
| WO2008044740A1 (en) * | 2006-10-13 | 2008-04-17 | Mitsui High-Tec, Inc. | Laminated iron core, and its manufacturing method |
| JP5171224B2 (ja) * | 2007-11-22 | 2013-03-27 | 三菱電機株式会社 | 回転電機 |
| CN102035277B (zh) * | 2009-10-07 | 2014-08-20 | 阿斯莫有限公司 | 电动机 |
| US9601950B2 (en) * | 2011-05-26 | 2017-03-21 | Mitsubishi Electric Corporation | Permanent magnet motor |
| US8963396B2 (en) * | 2011-09-26 | 2015-02-24 | Pangolin Laser Systems, Inc. | Electromechanical device and assembly method |
| US9270144B2 (en) * | 2011-09-26 | 2016-02-23 | William R. Benner, Jr. | High torque low inductance rotary actuator |
| JP5844205B2 (ja) | 2012-04-10 | 2016-01-13 | 住友重機械工業株式会社 | ステータコアおよびそれを用いた回転電動機 |
| US9106122B2 (en) * | 2013-01-25 | 2015-08-11 | Everette Energy, LLC | Single phase switched reluctance machine with short flux path |
| WO2017090571A1 (ja) * | 2015-11-27 | 2017-06-01 | 日本電産株式会社 | モータおよびモータの製造方法 |
| CN108155730B (zh) * | 2016-12-06 | 2022-02-25 | 松下电器产业株式会社 | 铁芯和电机 |
| JP6586436B2 (ja) * | 2017-04-25 | 2019-10-02 | 東芝三菱電機産業システム株式会社 | 回転電機およびその回転子 |
| CN110637408B (zh) * | 2017-05-23 | 2022-11-15 | 三键有限公司 | 层叠钢板及制造方法、发动机及层叠钢板用胶粘剂组合物 |
| CN108390478A (zh) * | 2018-05-31 | 2018-08-10 | 广东美芝制冷设备有限公司 | 定子铁芯、定子和电机 |
-
2019
- 2019-05-08 JP JP2019088270A patent/JP7209260B2/ja active Active
-
2020
- 2020-04-01 US US16/836,950 patent/US11601021B2/en active Active
- 2020-04-01 CN CN202010252648.3A patent/CN111917198B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007174827A (ja) * | 2005-12-22 | 2007-07-05 | Nissan Motor Co Ltd | 電動機の固定子構造 |
| JP2009112096A (ja) * | 2007-10-29 | 2009-05-21 | Toyota Industries Corp | ステータコアの固定方法および電動圧縮機 |
| JP2018093704A (ja) * | 2016-12-06 | 2018-06-14 | パナソニック株式会社 | 鉄心およびモータ |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2023139637A1 (ja) * | 2022-01-18 | 2023-07-27 | ||
| WO2023139637A1 (ja) * | 2022-01-18 | 2023-07-27 | 三菱電機株式会社 | ロータリ圧縮機 |
| JP7584682B2 (ja) | 2022-01-18 | 2024-11-15 | 三菱電機株式会社 | ロータリ圧縮機 |
| JP2024122001A (ja) * | 2023-02-28 | 2024-09-09 | トヨタ自動車株式会社 | 回転機 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111917198A (zh) | 2020-11-10 |
| CN111917198B (zh) | 2024-07-12 |
| JP7209260B2 (ja) | 2023-01-20 |
| US20200358323A1 (en) | 2020-11-12 |
| US11601021B2 (en) | 2023-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5186036B2 (ja) | Ipmモータの回転子及びそれを用いたipmモータ | |
| JP4840215B2 (ja) | 永久磁石式回転電機及びそれを用いた圧縮機 | |
| JP5859297B2 (ja) | 回転電機 | |
| JP5181827B2 (ja) | アキシャルギャップモータ及びそれを用いたファン装置 | |
| JP2008245440A (ja) | 誘導機 | |
| JP7209260B2 (ja) | 固定子およびモータ | |
| JP2008245346A (ja) | 整流子電動機およびそれを用いた電気掃除機 | |
| JPWO2014102950A1 (ja) | 回転電機 | |
| JP2011174103A (ja) | 鉄心用磁性材及びその製造方法、鉄心 | |
| JP2005304177A (ja) | 電動機および電動機の回転子に用いられるエンドプレート | |
| JP2010045870A (ja) | 回転機 | |
| JP2001303213A (ja) | 高効率モータ用の無方向性電磁鋼板 | |
| JP6069475B2 (ja) | 回転電機 | |
| TWI552486B (zh) | Axial air gap motor | |
| JP2010263714A (ja) | モータ用鉄心及びその製造方法 | |
| JP2020072626A (ja) | 回転電機のステータコア | |
| JP2003264946A (ja) | モータのステータ鉄心 | |
| JP2010068548A (ja) | 電動機 | |
| JP2001025181A (ja) | ステータコア材料及びそれを搭載したモータ | |
| JP2005354806A (ja) | 電動機用回転子、電動機用回転子の製造方法 | |
| JP5120019B2 (ja) | 電動機用固定子鉄心 | |
| JP2020178411A (ja) | 固定子鉄心およびモータ | |
| JP5152957B2 (ja) | ステータ鉄心と電動機のステータおよび電動機 | |
| JP5445003B2 (ja) | 電動機用固定子鉄心 | |
| JP2017099149A (ja) | 回転電機、回転電機の鉄心及び回転電機の鉄心の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20190625 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20191021 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220922 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220927 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221223 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7209260 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |