JP2019178590A - 自動ドアおよび自動ドアの制御方法 - Google Patents
自動ドアおよび自動ドアの制御方法 Download PDFInfo
- Publication number
- JP2019178590A JP2019178590A JP2018069696A JP2018069696A JP2019178590A JP 2019178590 A JP2019178590 A JP 2019178590A JP 2018069696 A JP2018069696 A JP 2018069696A JP 2018069696 A JP2018069696 A JP 2018069696A JP 2019178590 A JP2019178590 A JP 2019178590A
- Authority
- JP
- Japan
- Prior art keywords
- door
- opening operation
- opening
- automatic
- protection area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 22
- 238000001514 detection method Methods 0.000 claims abstract description 106
- 230000008569 process Effects 0.000 claims abstract description 10
- 230000000670 limiting effect Effects 0.000 abstract description 8
- 230000004048 modification Effects 0.000 description 58
- 238000012986 modification Methods 0.000 description 58
- 230000004913 activation Effects 0.000 description 8
- 239000004065 semiconductor Substances 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 240000004050 Pentaglottis sempervirens Species 0.000 description 2
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 241000287107 Passer Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
Images


















Abstract
Description
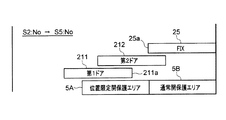
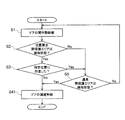
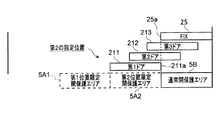
次に、以上のように構成された自動ドアシステム1を適用した自動ドア2の制御方法について説明する。図3は、本実施形態による自動ドア2の動作例を示すフローチャートである。図3のフローチャートは、必要に応じて繰り返される。図4は、本実施形態による自動ドア2の動作例を示す平面図である。図3の初期状態において、第1ドア211および第2ドア212は、図4に示すように全閉状態のドア21の位置にあるものとする。
次に、ドアの移動速度を減少させることで開作動を制限する第1の変形例について説明する。図10は、本実施形態の第1の変形例による自動ドア2の動作例を示すフローチャートである。
次に、ドアの移動速度を増加させることで開作動を制限しない第2の変形例について説明する。図11は、本実施形態の第2の変形例による自動ドア2の動作例を示すフローチャートである。
次に、ドアの移動距離に基づいてドアが指定位置に到達したと判断する第3の変形例について説明する。図12は、本実施形態の第3の変形例による自動ドア2の動作例を示すフローチャートである。
次に、ドアの移動時間に基づいてドアが指定位置に到達したと判断する第4の変形例について説明する。図13は、本実施形態の第4の変形例による自動ドア2の動作例を示すフローチャートである。
次に、三重引き戸の開作動を制御する第5の変形例について説明する。図14は、本実施形態の第5の変形例による自動ドア2の動作例を示す平面図である。図15は、図14に続く、本実施形態の第5の変形例による自動ドア2の動作例を示す平面図である。図16は、図15に続く、本実施形態の第5の変形例による自動ドア2の動作例を示す平面図である。図17は、図16に続く、本実施形態の第5の変形例による自動ドア2の動作例を示す平面図である。
次に、ワイドオープンドアの開作動を制御する第6の変形例について説明する。図18は、本実施形態の第6の変形例による自動ドア2の動作例を示す平面図である。図19は、図18に続く、本実施形態の第6の変形例による自動ドア2の動作例を示す平面図である。図20は、図19に続く、本実施形態の第6の変形例による自動ドア2の動作例を示す平面図である。
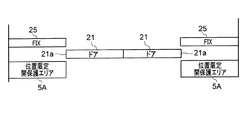
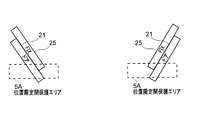
次に、スライドグライドドアの開作動を制御する第7の変形例について説明する。図21は、本実施形態の第7の変形例による自動ドア2の動作例を示す平面図である。図22は、図21に続く、本実施形態の第7の変形例による自動ドア2の動作例を示す平面図である。図23は、図22に続く、本実施形態の第7の変形例による自動ドア2の動作例を示す平面図である。図24は、図23に続く、本実施形態の第7の変形例による自動ドア2の動作例を示す平面図である。
21 ドア
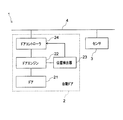
24 ドアコントローラ
Claims (9)
- ドアの開行程において前記ドアが指定位置に到達したと判断される前は、前記ドアの開側に設定された人又は物体を検知するセンサが検知状態になった場合に、前記ドアの開作動を制限し、
前記開行程において前記ドアが前記指定位置に到達したと判断された後は、前記センサが検知状態となっても前記開作動を制限しない制御を行う制御部を備えた自動ドア。 - 前記指定位置は、前記ドアの戸尻が固定部の戸先に一致した位置である、請求項1に記載の自動ドア。
- 前記制御部は、前記ドアの移動距離に基づいて、前記ドアが前記指定位置に到達したと判断する、請求項1に記載の自動ドア。
- 前記制御部は、前記ドアの移動時間に基づいて、前記ドアが前記指定位置に到達したと判断する、請求項1に記載の自動ドア。
- 前記制御部は、前記ドアを停止させることで前記開作動を制限する、請求項1に記載の自動ドア。
- 前記制御部は、前記ドアの移動速度を減少させることで前記開作動を制限する、請求項1に記載の自動ドア。
- 前記少なくとも一部の領域は、前記指定位置に到達した前記ドアのドア面に面する領域である、請求項1に記載の自動ドア。
- 前記制御部は、前記ドアの移動速度を増加させることで前記開作動を制限しない、請求項1に記載の自動ドア。
- ドアの開行程において前記ドアが指定位置に到達したと判断される前は、前記ドアの開側に設定された人又は物体を検知するセンサが検知状態になった場合に、前記ドアの開作動を制限し、
前記開行程において前記ドアが前記指定位置に到達したと判断された後は、前記センサが検知状態となっても前記開作動を制限しない、自動ドアの制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018069696A JP7108445B2 (ja) | 2018-03-30 | 2018-03-30 | 自動ドアおよび自動ドアの制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018069696A JP7108445B2 (ja) | 2018-03-30 | 2018-03-30 | 自動ドアおよび自動ドアの制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019178590A true JP2019178590A (ja) | 2019-10-17 |
| JP7108445B2 JP7108445B2 (ja) | 2022-07-28 |
Family
ID=68278116
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018069696A Active JP7108445B2 (ja) | 2018-03-30 | 2018-03-30 | 自動ドアおよび自動ドアの制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7108445B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023149092A1 (ja) * | 2022-02-02 | 2023-08-10 | オプテックス株式会社 | 自動ドアシステム |
| JP7425902B2 (ja) | 2020-07-07 | 2024-01-31 | ナブテスコ株式会社 | 自動ドア装置、通知制御装置、および自動ドアの通知方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008291598A (ja) * | 2007-05-28 | 2008-12-04 | Nabtesco Corp | 自動ドア、自動ドアセンサ及び自動ドア用調整装置 |
| JP2012219522A (ja) * | 2011-04-08 | 2012-11-12 | Mitsui Kinzoku Act Corp | ドア開閉装置 |
| WO2018043511A1 (ja) * | 2016-08-29 | 2018-03-08 | ナブテスコ株式会社 | 自動ドア、自動ドアセンサおよび自動ドアの開閉方法 |
-
2018
- 2018-03-30 JP JP2018069696A patent/JP7108445B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008291598A (ja) * | 2007-05-28 | 2008-12-04 | Nabtesco Corp | 自動ドア、自動ドアセンサ及び自動ドア用調整装置 |
| JP2012219522A (ja) * | 2011-04-08 | 2012-11-12 | Mitsui Kinzoku Act Corp | ドア開閉装置 |
| WO2018043511A1 (ja) * | 2016-08-29 | 2018-03-08 | ナブテスコ株式会社 | 自動ドア、自動ドアセンサおよび自動ドアの開閉方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7425902B2 (ja) | 2020-07-07 | 2024-01-31 | ナブテスコ株式会社 | 自動ドア装置、通知制御装置、および自動ドアの通知方法 |
| JP7425901B2 (ja) | 2020-07-07 | 2024-01-31 | ナブテスコ株式会社 | 自動ドア装置、通知制御装置、および自動ドアの通知方法 |
| WO2023149092A1 (ja) * | 2022-02-02 | 2023-08-10 | オプテックス株式会社 | 自動ドアシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7108445B2 (ja) | 2022-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109312594B (zh) | 自动门、自动门传感器以及自动门的开闭方法 | |
| EP1607562A1 (en) | Control device of opening and closing member | |
| US20180298671A1 (en) | Vehicle opening and closing apparatus | |
| JP5043354B2 (ja) | モータ制御装置及びモータのデューティ制御方法 | |
| JP2019178590A (ja) | 自動ドアおよび自動ドアの制御方法 | |
| JP2019052468A (ja) | 開閉体駆動装置 | |
| JP2012101921A (ja) | エレベータのドア制御装置 | |
| JP4734716B2 (ja) | 開閉体の開閉制御装置 | |
| JP2003027832A (ja) | 車両用開閉体の自動開閉装置 | |
| JP2009127347A (ja) | 自動ドア駆動装置及び自動ドア装置 | |
| US8456111B2 (en) | Linear drive for sliding doors or the like | |
| WO2017014247A1 (ja) | 開閉制御装置 | |
| JP7201403B2 (ja) | 自動ドアシステム、自動ドアセンサ、自動ドア装置および自動ドアシステムの制御方法 | |
| JP2003193745A (ja) | 自動ドア | |
| JP2022001733A (ja) | 自動ドアセンサ、自動ドアシステムおよび自動ドアセンサの制御方法 | |
| KR102299494B1 (ko) | 차량의 윈도 제어 장치 및 그 방법 | |
| JP6855256B2 (ja) | 自動ドア装置、自動ドアセンサおよび自動ドア装置の制御方法 | |
| JP6804406B2 (ja) | 挟み込み検出装置 | |
| JP2013060775A (ja) | 自動扉制御装置、自動扉システム及び自動扉制御方法 | |
| JP2020084436A (ja) | 自動ドアシステム、自動ドアセンサ、自動ドア装置および自動ドアシステムの制御方法 | |
| JP7253935B2 (ja) | 検知装置、自動ドアシステムおよび自動ドアシステムの制御方法 | |
| JP7062468B2 (ja) | 自動ドアシステムおよび自動ドアセンサの制御方法 | |
| JP2000314271A (ja) | 自動ドアの開扉保持用制御方法 | |
| JP2005008386A (ja) | エレベータのドア制御装置 | |
| JP6492706B2 (ja) | 車両窓開閉装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210302 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220325 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220621 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220715 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7108445 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |