JP2019149202A - エクストラミッシブ空間撮像デジタル眼鏡装置または拡張介在ビジョン - Google Patents
エクストラミッシブ空間撮像デジタル眼鏡装置または拡張介在ビジョン Download PDFInfo
- Publication number
- JP2019149202A JP2019149202A JP2019091204A JP2019091204A JP2019149202A JP 2019149202 A JP2019149202 A JP 2019149202A JP 2019091204 A JP2019091204 A JP 2019091204A JP 2019091204 A JP2019091204 A JP 2019091204A JP 2019149202 A JP2019149202 A JP 2019149202A
- Authority
- JP
- Japan
- Prior art keywords
- implementation
- space
- user
- light
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 title abstract description 78
- 239000012636 effector Substances 0.000 abstract description 199
- 230000003190 augmentative effect Effects 0.000 description 298
- 239000011521 glass Substances 0.000 description 253
- 230000001953 sensory effect Effects 0.000 description 230
- 238000001514 detection method Methods 0.000 description 226
- 238000000034 method Methods 0.000 description 179
- 210000003811 finger Anatomy 0.000 description 131
- 238000012545 processing Methods 0.000 description 129
- 210000001508 eye Anatomy 0.000 description 95
- 230000007613 environmental effect Effects 0.000 description 90
- 230000009471 action Effects 0.000 description 68
- 230000033001 locomotion Effects 0.000 description 67
- 230000003993 interaction Effects 0.000 description 60
- 210000003813 thumb Anatomy 0.000 description 43
- 230000000007 visual effect Effects 0.000 description 41
- 230000002441 reversible effect Effects 0.000 description 37
- 230000035807 sensation Effects 0.000 description 37
- 230000009466 transformation Effects 0.000 description 36
- 230000006870 function Effects 0.000 description 34
- 230000000694 effects Effects 0.000 description 33
- 238000005286 illumination Methods 0.000 description 33
- 239000013589 supplement Substances 0.000 description 33
- 238000010586 diagram Methods 0.000 description 29
- 210000003128 head Anatomy 0.000 description 29
- 230000003287 optical effect Effects 0.000 description 29
- 238000005259 measurement Methods 0.000 description 25
- 230000008569 process Effects 0.000 description 24
- 238000013461 design Methods 0.000 description 23
- 239000000123 paper Substances 0.000 description 23
- 238000012549 training Methods 0.000 description 22
- 230000004044 response Effects 0.000 description 21
- 238000006073 displacement reaction Methods 0.000 description 20
- 241000282414 Homo sapiens Species 0.000 description 19
- 210000004247 hand Anatomy 0.000 description 19
- 239000011324 bead Substances 0.000 description 18
- 238000004458 analytical method Methods 0.000 description 16
- 230000008859 change Effects 0.000 description 16
- 238000012544 monitoring process Methods 0.000 description 16
- 238000013507 mapping Methods 0.000 description 15
- 235000003166 Opuntia robusta Nutrition 0.000 description 14
- 244000218514 Opuntia robusta Species 0.000 description 14
- 238000004891 communication Methods 0.000 description 14
- 230000006854 communication Effects 0.000 description 14
- 210000004027 cell Anatomy 0.000 description 13
- 238000013528 artificial neural network Methods 0.000 description 12
- 238000001125 extrusion Methods 0.000 description 12
- 238000013519 translation Methods 0.000 description 12
- 210000003414 extremity Anatomy 0.000 description 11
- 239000012530 fluid Substances 0.000 description 11
- 230000001404 mediated effect Effects 0.000 description 11
- 210000002683 foot Anatomy 0.000 description 10
- 230000000670 limiting effect Effects 0.000 description 10
- 230000000712 assembly Effects 0.000 description 9
- 238000000429 assembly Methods 0.000 description 9
- 230000006399 behavior Effects 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 9
- 230000015572 biosynthetic process Effects 0.000 description 9
- 230000002452 interceptive effect Effects 0.000 description 9
- 238000003825 pressing Methods 0.000 description 9
- 238000003786 synthesis reaction Methods 0.000 description 9
- 239000002131 composite material Substances 0.000 description 8
- 230000010354 integration Effects 0.000 description 8
- 239000011159 matrix material Substances 0.000 description 8
- 238000010422 painting Methods 0.000 description 8
- 230000035945 sensitivity Effects 0.000 description 8
- 239000007787 solid Substances 0.000 description 8
- 230000006641 stabilisation Effects 0.000 description 8
- 230000003068 static effect Effects 0.000 description 8
- 101100274557 Heterodera glycines CLE1 gene Proteins 0.000 description 7
- 239000004927 clay Substances 0.000 description 7
- 238000001228 spectrum Methods 0.000 description 7
- 238000012360 testing method Methods 0.000 description 7
- 238000000844 transformation Methods 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 6
- 230000000875 corresponding effect Effects 0.000 description 6
- 238000010891 electric arc Methods 0.000 description 6
- 238000007689 inspection Methods 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 239000000203 mixture Substances 0.000 description 6
- 238000013439 planning Methods 0.000 description 6
- 238000005096 rolling process Methods 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 230000000295 complement effect Effects 0.000 description 5
- 239000000428 dust Substances 0.000 description 5
- 238000011156 evaluation Methods 0.000 description 5
- 239000004744 fabric Substances 0.000 description 5
- 210000005224 forefinger Anatomy 0.000 description 5
- 239000003550 marker Substances 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 210000000869 occipital lobe Anatomy 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 238000011105 stabilization Methods 0.000 description 5
- KRQUFUKTQHISJB-YYADALCUSA-N 2-[(E)-N-[2-(4-chlorophenoxy)propoxy]-C-propylcarbonimidoyl]-3-hydroxy-5-(thian-3-yl)cyclohex-2-en-1-one Chemical compound CCC\C(=N/OCC(C)OC1=CC=C(Cl)C=C1)C1=C(O)CC(CC1=O)C1CCCSC1 KRQUFUKTQHISJB-YYADALCUSA-N 0.000 description 4
- 230000003044 adaptive effect Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 230000001413 cellular effect Effects 0.000 description 4
- 239000003086 colorant Substances 0.000 description 4
- 230000036461 convulsion Effects 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000004424 eye movement Effects 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 4
- 230000001965 increasing effect Effects 0.000 description 4
- 230000035515 penetration Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000002085 persistent effect Effects 0.000 description 4
- 239000000047 product Substances 0.000 description 4
- 239000005060 rubber Substances 0.000 description 4
- 238000012163 sequencing technique Methods 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 230000000638 stimulation Effects 0.000 description 4
- 230000000153 supplemental effect Effects 0.000 description 4
- 230000001960 triggered effect Effects 0.000 description 4
- 238000003466 welding Methods 0.000 description 4
- 238000002679 ablation Methods 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 230000009172 bursting Effects 0.000 description 3
- 208000018747 cerebellar ataxia with neuropathy and bilateral vestibular areflexia syndrome Diseases 0.000 description 3
- 229940112822 chewing gum Drugs 0.000 description 3
- 235000015218 chewing gum Nutrition 0.000 description 3
- 230000001186 cumulative effect Effects 0.000 description 3
- 238000013480 data collection Methods 0.000 description 3
- 238000010410 dusting Methods 0.000 description 3
- 210000005069 ears Anatomy 0.000 description 3
- 210000000887 face Anatomy 0.000 description 3
- 238000007667 floating Methods 0.000 description 3
- 235000013305 food Nutrition 0.000 description 3
- 230000004927 fusion Effects 0.000 description 3
- 239000000976 ink Substances 0.000 description 3
- 238000007726 management method Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000002503 metabolic effect Effects 0.000 description 3
- 238000010606 normalization Methods 0.000 description 3
- 239000003973 paint Substances 0.000 description 3
- 230000036961 partial effect Effects 0.000 description 3
- 239000000843 powder Substances 0.000 description 3
- 238000003892 spreading Methods 0.000 description 3
- 230000007480 spreading Effects 0.000 description 3
- 238000000551 statistical hypothesis test Methods 0.000 description 3
- 238000003860 storage Methods 0.000 description 3
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 2
- 241000270722 Crocodylidae Species 0.000 description 2
- 101150027068 DEGS1 gene Proteins 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 241001481166 Nautilus Species 0.000 description 2
- 241000475481 Nebula Species 0.000 description 2
- 206010000269 abscess Diseases 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 210000000617 arm Anatomy 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000004040 coloring Methods 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 239000004567 concrete Substances 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 230000001351 cycling effect Effects 0.000 description 2
- LNNWVNGFPYWNQE-GMIGKAJZSA-N desomorphine Chemical compound C1C2=CC=C(O)C3=C2[C@]24CCN(C)[C@H]1[C@@H]2CCC[C@@H]4O3 LNNWVNGFPYWNQE-GMIGKAJZSA-N 0.000 description 2
- 230000005670 electromagnetic radiation Effects 0.000 description 2
- 230000002708 enhancing effect Effects 0.000 description 2
- 239000012634 fragment Substances 0.000 description 2
- 239000003292 glue Substances 0.000 description 2
- 239000010439 graphite Substances 0.000 description 2
- 229910002804 graphite Inorganic materials 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000003760 hair shine Effects 0.000 description 2
- 239000011121 hardwood Substances 0.000 description 2
- 230000036541 health Effects 0.000 description 2
- 238000001093 holography Methods 0.000 description 2
- 230000001788 irregular Effects 0.000 description 2
- 210000002414 leg Anatomy 0.000 description 2
- 238000007477 logistic regression Methods 0.000 description 2
- 239000004579 marble Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000002156 mixing Methods 0.000 description 2
- 238000010295 mobile communication Methods 0.000 description 2
- 210000003205 muscle Anatomy 0.000 description 2
- 230000006855 networking Effects 0.000 description 2
- 230000001537 neural effect Effects 0.000 description 2
- 238000012015 optical character recognition Methods 0.000 description 2
- 210000000056 organ Anatomy 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 230000037081 physical activity Effects 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 230000001737 promoting effect Effects 0.000 description 2
- 210000001747 pupil Anatomy 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000009877 rendering Methods 0.000 description 2
- 230000008439 repair process Effects 0.000 description 2
- 238000005316 response function Methods 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 238000010187 selection method Methods 0.000 description 2
- 230000020341 sensory perception of pain Effects 0.000 description 2
- 238000007493 shaping process Methods 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- 230000003595 spectral effect Effects 0.000 description 2
- 239000004575 stone Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 230000009182 swimming Effects 0.000 description 2
- 238000012800 visualization Methods 0.000 description 2
- 210000000707 wrist Anatomy 0.000 description 2
- 241000372033 Andromeda Species 0.000 description 1
- 206010003805 Autism Diseases 0.000 description 1
- 208000020706 Autistic disease Diseases 0.000 description 1
- NBGBEUITCPENLJ-UHFFFAOYSA-N Bunazosin hydrochloride Chemical compound Cl.C1CN(C(=O)CCC)CCCN1C1=NC(N)=C(C=C(OC)C(OC)=C2)C2=N1 NBGBEUITCPENLJ-UHFFFAOYSA-N 0.000 description 1
- 208000033748 Device issues Diseases 0.000 description 1
- 241000282816 Giraffa camelopardalis Species 0.000 description 1
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 description 1
- GVGLGOZIDCSQPN-PVHGPHFFSA-N Heroin Chemical compound O([C@H]1[C@H](C=C[C@H]23)OC(C)=O)C4=C5[C@@]12CCN(C)[C@@H]3CC5=CC=C4OC(C)=O GVGLGOZIDCSQPN-PVHGPHFFSA-N 0.000 description 1
- 235000015842 Hesperis Nutrition 0.000 description 1
- 241000282412 Homo Species 0.000 description 1
- 235000012633 Iberis amara Nutrition 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 208000000114 Pain Threshold Diseases 0.000 description 1
- 241001233278 Scalopus aquaticus Species 0.000 description 1
- 241000593989 Scardinius erythrophthalmus Species 0.000 description 1
- 241000555745 Sciuridae Species 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 206010047571 Visual impairment Diseases 0.000 description 1
- 239000008186 active pharmaceutical agent Substances 0.000 description 1
- 238000004873 anchoring Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000003416 augmentation Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000037237 body shape Effects 0.000 description 1
- 210000005252 bulbus oculi Anatomy 0.000 description 1
- 230000000981 bystander Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 235000014510 cooky Nutrition 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000002790 cross-validation Methods 0.000 description 1
- 108010038204 cytoplasmic linker protein 190 Proteins 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000005034 decoration Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000000280 densification Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 230000003467 diminishing effect Effects 0.000 description 1
- 230000026058 directional locomotion Effects 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000008846 dynamic interplay Effects 0.000 description 1
- 210000002310 elbow joint Anatomy 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 230000008921 facial expression Effects 0.000 description 1
- 210000003746 feather Anatomy 0.000 description 1
- 230000005057 finger movement Effects 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 210000000245 forearm Anatomy 0.000 description 1
- 238000005194 fractionation Methods 0.000 description 1
- 238000009432 framing Methods 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 238000003702 image correction Methods 0.000 description 1
- 230000001976 improved effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 210000004936 left thumb Anatomy 0.000 description 1
- 235000013490 limbo Nutrition 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 239000010813 municipal solid waste Substances 0.000 description 1
- 238000003058 natural language processing Methods 0.000 description 1
- 210000002569 neuron Anatomy 0.000 description 1
- 230000003040 nociceptive effect Effects 0.000 description 1
- 201000005111 ocular hyperemia Diseases 0.000 description 1
- 230000037040 pain threshold Effects 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 238000009428 plumbing Methods 0.000 description 1
- 238000005381 potential energy Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000010223 real-time analysis Methods 0.000 description 1
- 230000002207 retinal effect Effects 0.000 description 1
- 210000004935 right thumb Anatomy 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 239000005336 safety glass Substances 0.000 description 1
- 238000007665 sagging Methods 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000006748 scratching Methods 0.000 description 1
- 230000002393 scratching effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 230000008786 sensory perception of smell Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 230000003997 social interaction Effects 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000004936 stimulating effect Effects 0.000 description 1
- 230000009469 supplementation Effects 0.000 description 1
- 230000008093 supporting effect Effects 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000017105 transposition Effects 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
- 238000007794 visualization technique Methods 0.000 description 1
- 230000004584 weight gain Effects 0.000 description 1
- 235000019786 weight gain Nutrition 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/013—Eye tracking input arrangements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
- G06F3/04815—Interaction with a metaphor-based environment or interaction object displayed as three-dimensional, e.g. changing the user viewpoint with respect to the environment or object
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
- G06F3/0482—Interaction with lists of selectable items, e.g. menus
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
- G06F3/04842—Selection of displayed objects or displayed text elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/014—Head-up displays characterised by optical features comprising information/image processing systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B2027/0178—Eyeglass type
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0179—Display position adjusting means not related to the information to be displayed
- G02B2027/0187—Display position adjusting means not related to the information to be displayed slaved to motion of at least a part of the body of the user, e.g. head, eye
Abstract
Description
本願は、2013年1月3日出願の米国仮特許出願整理番号第61/748,468号および2013年12月16日出願の米国仮特許出願整理番号第61/916,773号に関連し、米国特許法第119条e項に基づきこれらの特許出願の国内優先権の利益を主張する。なお、これらの特許出願の全内容は本願に参照することにより、本願に明確に援用される。

アイコンはソフトウェア・アプリケーションおよび/またはデータを表現し得る。一実装では、アイコンは、バブル・アイコンまたは任意形状のアイコンにより表現され得る。一実装では、バブル・アイコンはバブルに類似した半透光性球体である。アイコンはアプリケーション・ロゴを含み得る。例えばバブル・アイコン内に、3次元の不透明またはほとんど不透明なアプリケーション・ロゴが存在し得る。1つの設計例では、ロゴと、包囲する球体と、の比は、およそ1:5であってよい。ともに、バブル・アイコンおよびアプリケーション・ロゴは、例えば(例えば少なくとも部分的に)ユーザの画像を反射すること、太陽光を反射すること、バブル上での空気流をシミュレートし、バブル形状を軽微に変化させること、他の物理的オブジェクトがバブルを押圧することをシミュレートし、その形状を軽微に変化させること、および/またはその他の同等物などの、バブル状の挙動を引き出す、および/または係る挙動に関連付けられた、効果を含み得る。
一実装では、x軸が視野域802の底部(例えばグリッドの下方ライン)に沿って存在する。以下は、フォルダ・レベルにおける進行例である。ここでは、一実装では、以下の動作を有する方法が使用される。
エンド・アプリケーションは、アイコンのツリーのリーフを提供(表示)するよう構成されたソフトウェア・アプリケーションである。例えば一実装では、アイコンのツリーは、N分木のツリー(例えば各ノードは最多でN個の子を有する)であってよい。他の実装では、ノードは異なる最大個数の子を有してもよく、無制限個数の子を有してもよく、および/またはその他の子を有してもよい。
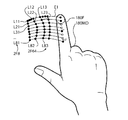
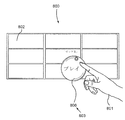
「セッティング・セレクション・テクニック(Settings Selection Technique)」ジェスチャは、一実装では、アプリケーション内に文脈上設定が、それらの設定を使用を希望する各アプリケーション内に存在すること、を含む。選択方法および設定アイコンに対する場所の一例は、以下のようである。すなわち、3×3グリッドの最も右側の縦列の上方半分において、事前決定された時間(例えば2秒)にわたり手を視野域に入れることにより、アイコンが選択され得る。次にバブルが上方右側セルに現れるであろう。このバブルは、例えばフィンガー・セレクション(Finger Selection)方法を介して選択され得る(図11A参照)。
レベル5は、様々な実装における、テーマおよびジェスチャのための実装を提供する。例えば、追加的な相互作用技術は、画像またはビデオを射撃することを示すためのシューティング・ゲームで使用されるガン・ハンド・モーション(gun hand motion)を含み得る。他の例は、アイコンの平坦デスクトップの並行的両手上昇および下降(parallel two−handed raising and lowering)を含む。そこでは、アイコンが視野域下方から上向きに入り、再び下降して視野域から取り外される。選択肢は、仮想的ノブを回転させて、連続的な設定(例えば輝度)を変更することを含む。他の選択肢は、ズーム特徴を使用することを含む。ここでは、掌が上向きの平たい手(例えば掌は、カム・トゥ・ズーム運動(Come to Zoom motion)が起動されるまで、事前決定された時間を平たい状態で費やす)の状態から、(「こっちへ来い」の自然のジェスチャと同様の)同時に曲げられた指の状態へと、動くことにより、ズームが行われる。他の実装は、1本指のみを使用する(残余の指(1本または2本以上の)が静止的に曲げられている間に、1本の指が真っ直ぐの状態から曲げられた状態に変化する)。他の実装は、視野域から手を取り除くことによりズーム・レベルを一定に保持するための能力を含む。他の選択肢はズーム・アウト・ジェスチャ(Zoom Out Gesture)を含む。このジェスチャは、このジェスチャが、事前決定された時間(例えば1秒)にわたり全部の指が曲げられた(例えば拳へと握り締めた)状態から開始される点を除き、カム・トゥ・ズーム・ジェスチャ(Come to Zoom gesture)と同等であってよい。ズーム・アウトは、指が伸ばされたとき、行われる。他の選択肢は親指立てジェスチャを含む。親指立てジェスチャは、ソーシャル・ネットワーク上の画像の嗜好(承認を示す)のめたに、またはネイティブ・オペレーティングシステム内での嗜好のために使用され得る。
以下の付記は、装置の実施例に関するさらなる説明として提供される。以下の付記のうちの1以上は、以下の付記のうちのいずれかの他の1以上と、および/またはいずれかの他の付記および/もしくは請求項の組み合わせおよび並び替えのサブセクションすなわち一部と、組み合せ可能である。以下の付記のいずれかの1項は、他の付記と、またはいずれかの他の付記のいずれかの部分と、組み合わされなくても、それ自体の真価を有する。
付記(1):センサ信号およびエフェクタ信号を第1の空間と交換するよう構成された第1のインターフェース・モジュールと、エフェクタ信号を第2の空間と交換するよう構成された第2のインターフェース・モジュールと、を含むインターフェース・アセンブリを含み、前記エフェクタ信号は、前記第1の空間および前記第2の空間のうちの少なくとも1つにおいて少なくとも部分的にユーザ提示可能である、検出および表示装置。
付記(2):第1の空間から受け取った感覚現象を表現する少なくとも1つのセンサ信号にインターフェース接続するよう構成された第1のインターフェース・モジュールと、前記第1の空間および前記第2の空間に対して感覚現象を表現する少なくとも1つのエフェクタ信号にインターフェース接続するよう構成された第2のインターフェース・モジュールと、を含むインターフェース・アセンブリを含む、検出および表示装置。
付記(3):前記少なくとも1つのセンサ信号および前記少なくとも1つのエフェクタ信号は、少なくとも部分的に、前記第1の空間および前記第2の空間のうちの少なくとも1つにおけるユーザ感覚消費に対して提示可能である、本段落に記載のいずれかの付記に記載の装置。
付記(4):前記インターフェース・アセンブリに動作可能に連結され、前記インターフェース・アセンブリにインターフェース接続された前記少なくとも1つのセンサ信号と、前記インターフェース・アセンブリにインターフェース接続された前記少なくとも1つのエフェクタ信号と、を処理するよう構成された処理装置をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記(5):前記第1の空間から受け取った感覚現象から導出された前記少なくとも1つのセンサ信号を伝送するよう構成されると共に、前記第2の空間から受け取った感覚現象から導出された前記少なくとも1つのセンサ信号を伝送するようにも構成された、感覚現象センサをさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記(6):感覚現象に関連付けられた前記少なくとも1つのエフェクタ信号を前記第1の空間に伝送するよう構成されると共に、感覚現象に関連付けられた前記少なくとも1つのエフェクタ信号を前記第2の空間に伝送するようにも構成された、感覚現象エフェクタをさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記(7):前記インターフェース・アセンブリは、前記第1の空間から前記感覚現象センサを介して受け取った感覚現象を表現し、且つ前記第2の空間から受け取った感覚現象も表現する、少なくとも1つのセンサ信号にインターフェース接続するよう構成されると共に、感覚現象を表現する前記少なくとも1つのエフェクタ信号を感覚現象エフェクタを介して前記第1の空間に、および前記第2の空間に、インターフェース接続するようにも構成された、本段落に記載のいずれかの付記に記載の装置。
付記(8):前記第1の空間はユーザによりアクセス可能となるよう構成され、前記第2の空間は単一ユーザによりアクセス可能となるよう構成された、本段落に記載のいずれかの付記に記載の装置。
付記(9):前記少なくとも1つのセンサ信号は、音響感覚現象、視覚感覚現象、および接触知感覚現象のうちのいずれかの1つから導出される、本段落に記載のいずれかの付記に記載の装置。
付記(10):前記少なくとも1つのエフェクタ信号は、音響感覚現象、視覚感覚現象、および接触知感覚現象のうちのいずれかの1つから導出される、本段落に記載のいずれかの付記に記載の装置。
付記(11):前記感覚現象センサおよび前記感覚現象エフェクタは、感覚現象から導出されたセンサ信号を前記第1の空間から伝送するよう構成された第1の感覚現象センサと、感覚現象に関連付けられたエフェクタ信号を前記第1の空間に伝送するよう構成された第1の感覚現象エフェクタと、を含む、本段落に記載のいずれかの付記に記載の装置。
付記(12):前記感覚現象センサおよび前記感覚現象エフェクタは、感覚現象を有するエフェクタ信号を前記第2の空間に伝送するよう構成された第2の感覚現象エフェクタと、感覚現象から導出されたセンサ信号を前記第2の空間から伝送するよう構成された第2の感覚現象センサと、を含む、本段落に記載のいずれかの付記に記載の装置。
付記(13):前記第1の感覚現象センサおよび前記第1の感覚現象エフェクタは、前記第1の空間内の前記ユーザの視野域の方向に対向し、前記第2の感覚現象エフェクタおよび前記第2の感覚現象センサは、前記第2の空間内の前記ユーザの眼に向かう方向に対向する、本段落に記載のいずれかの付記に記載の装置。
付記(14):前記処理装置は前記センサ信号を前記第1の空間と前記第2の空間との間で転送するよう構成された、本段落に記載のいずれかの付記に記載の装置。
付記(15):前記処理装置は前記エフェクタ信号を前記第1の空間と前記第2の空間との間で転送するよう構成された、本段落に記載のいずれかの付記に記載の装置。
付記(16):前記インターフェース・アセンブリは、前記第1の感覚現象センサにより受け取った感覚現象から導出されたセンサ信号を前記第1の空間から伝送するよう構成された第1の感覚現象センサにインターフェース接続するよう構成された第1のインターフェース・モジュールと、感覚現象に関連付けられたエフェクタ信号を前記第1の空間に伝送するよう構成された第1の感覚現象エフェクタにインターフェース接続するよう構成された第2のインターフェース・モジュールと、を含む、本段落に記載のいずれかの付記に記載の装置。
付記(17):前記インターフェース・アセンブリは、感覚現象を有するエフェクタ信号を前記第2の空間に伝送するよう構成された第2の感覚現象エフェクタにインターフェース接続するよう構成された第3のインターフェース・モジュールと、前記第2の感覚現象センサにより受け取った前記感覚現象から導出されたセンサ信号を前記第2の空間から伝送するよう構成された第2の感覚現象センサにインターフェース接続するよう構成された第4のインターフェース・モジュールと、を含む、本段落に記載のいずれかの付記に記載の装置。
付記(18):前記処理装置は、第1の感覚現象センサから受け取ったセンサ信号を第2の感覚現象エフェクタを介して前記第2の空間に転送するよう構成された、本段落に記載のいずれかの付記に記載の装置。
付記(19):前記処理装置は、第2の感覚現象センサから受け取ったセンサ信号を第1の感覚現象エフェクタを介して前記第1の空間に転送するよう構成された、本段落に記載のいずれかの付記に記載の装置。
付記(20):ユーザが装着することを支援するよう構成されたユーザ装着可能なインターフェースをさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記(21):前記第1の空間から受け取った感覚現象から導出された前記少なくとも1つのセンサ信号を伝送するよう構成されると共に、前記第2の空間から受け取った感覚現象から導出された前記少なくとも1つのセンサ信号を伝送するようにも構成された感覚現象センサと、感覚現象に関連付けられた前記少なくとも1つのエフェクタ信号を前記第1の空間に伝送するよう構成されると共に、感覚現象に関連付けられた前記少なくとも1つのエフェクタ信号を前記第2の空間に伝送するようにも構成された感覚現象エフェクタと、のうちのいずれかの1つを固定的に支持するよう構成されたフレーム・アセンブリをさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記(22):頭部搭載可能アセンブリ、デジタル眼鏡、LiDARユニット、ビジョン・システム、光センサ、ディスプレイ・ユニット、着脱可能シェード、赤外線送信器、赤外線受信器、およびジオフォンのうちのいずれかの1つを固定的に支持するよう構成されたフレーム・アセンブリをさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記(23):第1の空間から、および第2の空間から、受け取った少なくとも1つの感覚現象を表現するセンサ信号を受け取ることと、少なくとも1つのエフェクタ現象を表現するエフェクタ信号を前記第1の空間に、および前記第2の空間に、提供することと、を含む方法。
付記(24):前記センサ信号および前記エフェクタ信号を処理すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記(25):前記センサ信号を前記第1の空間と前記第2の空間との間で転送すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記(26):前記エフェクタ信号を前記第1の空間と前記第2の空間との間で転送すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記(27):第1の空間および第2の空間にインターフェース接続するよう構成されたインターフェース・アセンブリであって、前記第1の空間および前記第2の空間に関連付けられたセンサ信号およびエフェクタ信号を伝達するよう構成されたインターフェース・アセンブリと、前記インターフェース・アセンブリに動作可能に連結された処理装置であって、前記インターフェース・アセンブリにより伝達された前記センサ信号および前記エフェクタ信号を処理するよう構成された処理装置と、前記センサ信号および前記エフェクタ信号に対して操作を実行することを前記処理装置に命じるよう構成されたプログラム命令のシーケンスを含む処理用プログラムを有形的に具体化するよう構成されたメモリ・アセンブリと、を含む、表示装置。
付記(28):第1の空間から導出された現象を表示するよう構成された第1のインターフェース・セクションと、第2の空間から導出された現象を表示するよう構成された第2のインターフェース・セクションと、を含むユーザ・インターフェース。
付記(29):第1の空間に動作可能にインターフェース接続するよう構成された第1の現象インターフェースと、第2の空間に動作可能にインターフェース接続するよう構成された第2の現象インターフェースと、を含む装置。
付記(30):前記第1の現象インターフェースは、それぞれが前記第1の空間に動作可能にインターフェース接続するよう構成された、第1の感覚現象エフェクタおよび第1の感覚現象センサを含む、本段落に記載のいずれかの付記に記載の装置。
付記(31):第2の現象インターフェースは、それぞれが前記第2の空間に動作可能にインターフェース接続するよう構成された、第2の感覚現象エフェクタおよび第2の感覚現象センサを含む、本段落に記載のいずれかの付記に記載の装置。
付記(32):前記第1の現象インターフェースおよび前記第2の現象インターフェースに動作可能に連結するよう構成されると共に、前記第1の感覚現象エフェクタ、前記第1の感覚現象センサ、前記第2の感覚現象エフェクタ、および前記第2の感覚現象センサと動作可能に相互作用するようさらに構成された、処理アセンブリをさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記(33):本段落に記載のいずれかの付記に記載の装置のためのマニフォールダイザであって、前記装置の装着者の身体部分のジェスチャを検知するためのジェスチャ・センサと、前記ジェスチャ・センサにより検出された多様体開始ジェスチャに応答する多様体生成器と、前記装着者と多様体とのコンタクトを検出するための多様体コンタクト検出器と、前記多様体コンタクト生成器の出力に応答する多様体表示生成器と、を含む、マニフォールダイザ。
付記(34):本段落に記載のいずれかの付記に記載のマニフォールダイザを含み、実質的に連続的な多様体継続ジェスチャに応答する多様体集成器をさらに含む、トポスカルプタ。
付記(35):本段落に記載のいずれかの付記に記載のマニフォールダイザを含む、仮想的な装置または実際の装置の出力を表示するための、マニフォールダイズされた表示生成器。
付記(36):前記多様体表示生成器は、前記デジタル眼鏡の前記装着者に可視である3次元拡張介在環境に埋め込まれた硬質な平面パッチを含む2次元多様体を表示する、本段落に記載のいずれかの付記に記載のマニフォールダイズされた表示生成器。
付記(37):3次元ビジョン・システム、プロセッサ、およびディスプレイを含み、前記プロセッサは露光集成器を含み、前記露光集成器は前記3次元ビジョン・システムからの入力に応答する、アバコグラフィック・ユーザ・インターフェース。
付記(38):多様体寸法センサと、前記多様体寸法センサの出力に応答するジェスチャ・センサと、を含む、本段落に記載のいずれかの付記に記載のユーザ・インターフェース。
付記(39):現実世界物理的オブジェクトは2次元多様体を含み、前記多様体寸法センサは、ジェスチャが、アバコグラフに沿って、前記多様体内からアバコグラフまで、または前記多様体上にはない3次元空間内からアバコグラフまで、作られたかどうかを判定する、本段落に記載のいずれかの付記に記載のユーザ・インターフェース。
付記(40):空間内に多様体を生成するための3次元スカルプティング・システムであって、3次元ビジョン・システムと、露光を蓄積する露光集成器と、前記露光集成器の出力を表示するためのディスプレイと、を含むシステム。
付記(41):前記露光集成器の露光蓄積を起動するためのジェスチャを検知するためのジェスチャ・センサをさらに含む、本段落に記載のいずれかの付記に記載のシステム。
付記(42)前記ジェスチャ・センサは前記露光集成器の露光蓄積を停止するためのジェスチャを検出する、本段落に記載のいずれかの付記に記載のシステム。
付記(43):前記露光集成器は、3次元空間内で一時的に発光する多様体を生成する、本段落に記載のいずれかの付記に記載のシステム。
付記(44):ユーザの身体部分の、前記一時的に発光する多様体により画成される経路に対する接触を判定するための接触センサをさらに含む、本段落に記載のいずれかの付記に記載のシステム。
付記(45):露光バッファの割り当て、およびクリアを行うことと、露光器の露光強度の度合いを検知することと、露光器の、3次元空間における位置を検知することと、前記露光器の前記位置に関連する前記露光強度に比例する量を前記露光バッファに加えることと、を含む、アバコグラフィック構成のための方法。
付記(46):露光強度の前記度合いはジェスチャ・センサにより決定されるバイナリ量である、本段落に記載のいずれかの付記に記載の方法。
付記(47):前記露光器は光源であり、前記露光強度は前記光源の照明の度合いである、本段落に記載のいずれかの付記に記載の方法。
付記(48):前記露光器は指先であり、前記露光強度は連続的に変動するハンド・ジェスチャにより決定される、本段落に記載のいずれかの付記に記載の方法。
付記(49):人差し指および親指の「銃」ジェスチャを検知するジェスチャ・センサにより、アバコグラフィック構成を起動すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記(50):前記露光強度は、前記親指と前記人差し指との間の角度により連続的に変動する、本段落に記載のいずれかの付記に記載の方法。
付記(51):トポスカルプティング・バッファの割り当て、およびクリアを行うことと、露光器の露光強度の度合いを検知することと、露光器の、3次元空間における位置を検知することと、前記露光器の前記位置に関連する前記露光強度に比例する量を前記トポスカルプティング・バッファに加えることと、を含む、トポスカルプティングのための方法。
付記(52):前記位置を検知することは、前記方法のユーザの身体部分の平坦部分の、進行中のトポスカルプチャへの接触を、最も近い時点における前記トポスカルプチャとの接点において、検知することを含み、前記露光強度は前記接触を検知することの出力に比例する、本段落に記載のいずれかの付記に記載の方法。
付記(53):スキャン可能な対象物を閲覧するためのスペースグラス装置であって、空間撮像カメラと、前記空間撮像カメラの少なくとも1つの出力に応答するプロセッサと、ホログラフィック・ビデオ・ディスプレイ、立体的ビデオ・ディスプレイ、アレマック(aremac)、立体ディスプレイからなる群より選択される空間撮像ディスプレイと、を含み、前記空間撮像ディスプレイはプロセッサの少なくとも1つの出力に応答し、前記スキャン可能な対象物のうちの少なくともいくつかから導出されたアイ・ポイント画像を提供する、スペースグラス装置。
付記(54):前記空間撮像カメラは3Dカメラを含む、本段落に記載のいずれかの付記に記載の装置。
付記(55):前記プロセッサは接触検出器を含む、本段落に記載のいずれかの付記に記載の装置。
付記(56):前記プロセッサは射影変換侵入検出器を含む、本段落に記載のいずれかの付記に記載の装置。
付記(57):前記プロセッサは球形状体積侵入検出器を含む、本段落に記載のいずれかの付記に記載の装置。
付記(58):前記プロセッサはバブル・メタファー生成器を含む、本段落に記載のいずれかの付記に記載の装置。
付記59:前記プロセッサは、バブル・メニューと、前記装置のユーザの身体の1部分からrより小さい距離に配置された半径rの球体の体積への侵入に応答するバブル・メニュー選択器と、をシミュレートし、前記ユーザの前記身体の前記一部は、前記体積への侵入の度合いにおいて統計的に有意である、本段落に記載のいずれかの付記に記載の装置。
付記60:スペースグラスのための共有拡張介在現実システムであって、前記共有拡張介在現実システムの第1のユーザにより使用されるための第1のスペースグラスであって、第1の空間撮像カメラを含む、第1のスペースグラスと、前記共有拡張介在現実システムの第2のユーザにより使用されるための第2のスペースグラスであって、前記第2のスペースグラスは第2の空間撮像カメラを含み、前記第1の空間撮像カメラおよび前記第2の空間撮像カメラは対象物の空間撮像を行うよう構成された、第2のスペースグラスと、前記第1の空間撮像カメラおよび前記第2の空間撮像カメラからからのスキャニングを多重化するための空間撮像マルチプレクサと、を含む、システム。
付記61:前記空間撮像マルチプレクサは時分割マルチプレクサである、本段落に記載のいずれかの付記に記載の共有拡張介在現実システム。
付記62:前記デジタル眼鏡の装着者の単眼または両眼により閲覧されるためのデジタル眼鏡装置であって、複数の異なる方向から光を検知するための少なくとも1つのセンサと、前記センサからの少なくとも1つの入力に応答するプロセッサと、前記プロセッサの出力に応答するディスプレイと、を含み、前記ディスプレイはアイ・ポイント画像を提供する、デジタル眼鏡装置。
付記63:前記センサは3Dカメラである、本段落に記載のいずれかの付記に記載のデジタル眼鏡装置。
付記64:前記センサは3Dカメラは3DHDRを実施する、本段落に記載のいずれかの付記に記載のデジタル眼鏡装置。
付記65:前記3Dカメラは、共有コンピュータ介在現実環境内の他の参加者により装着される他の3Dカメラと共同作業する時分割マルチプレクサを含む、本段落に記載のいずれかの付記に記載のデジタル眼鏡装置。
付記66:前記3Dカメラは、共有コンピュータ介在現実環境内の他の参加者により装着される他の3Dカメラと共同作業する可変振幅マルチプレクサを含み、前記可変振幅マルチプレクサは、対象物の略同等の取得を、前記対象物の異なる度合いの照明に応答して、提供する、本段落に記載のいずれかの付記に記載のデジタル眼鏡装置。
付記67:前記プロセッサは、コンピュータ介在現実を共有する少なくとも1人の参加者の照明器により生成されるライトスペースに応答する合成アパーチャ撮像構築器を含む、本段落に記載のいずれかの付記に記載のデジタル眼鏡装置。
付記68:1以上のスペースグラスであって、前記スペースグラスのビュー表示内の対象物を空間撮像するための、スペースグラスを含むスペースグラス・システムであって、少なくとも1つの3Dカメラと、前記少なくとも1つの3Dカメラからの少なくとも1つの入力に応答するプロセッサと、前記プロセッサの出力に応答するディスプレイであって、前記対象物内に存在する空間情報に応答してアイタップ視点描画を提供する、ディスプレイと、をさらに含む、スペースグラス・システム。
付記69:前記プロセッサはコンパラメトリック合成器を含む、本段落に記載のいずれかの付記に記載のシステム。
付記70:第1のスペースグラスおよび第2のスペースグラスをさらに含み、前記プロセッサは前記第2のスペースグラスとともに使用される、本段落に記載のいずれかの付記に記載のシステム。
付記71:第1のスペースグラスおよび第2のスペースグラスをさらに含み、前記プロセッサは前記第2のスペースグラスとともに使用され、前記第1のスペースグラスおよび前記第2のスペースグラスは2人の別個のユーザにより装着され、前記プロセッサはスーパーポジメトリック合成器を含む、本段落に記載のいずれかの付記に記載のシステム。
付記72:ライトスペース分析眼鏡と、前記ライトスペース分析眼鏡の出力に応答するプロセッサと、前記プロセッサの出力に応答するライトスペース合成眼鏡と、ライトスペース・コリニアライザと、を含む空間撮像装置。
付記73:環境内の第1の環境オブジェクトを、少なくとも1つのセンサを介して追跡することと、少なくとも1つの環境オブジェクト識別子を前記第1の環境オブジェクトに割り当てることと、前記第1の環境オブジェクトに関連付けられた少なくとも1つの空間座標を特定することと、前記少なくとも1つの空間座標に基づいて、座標系と前記環境オブジェクト識別子とを関連付けることと、を含むジェスチャ認識プロセッサにより実装される方法。
付記74:第2の環境オブジェクトのジェスチャを前記少なくとも1つのセンサを介して前記座標系にマッピングすること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記75:ジェスチャをマッピングすることは、前記第2の環境オブジェクトに関連付けられた点群を生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記76:ジェスチャをマッピングすることは、前記第2の環境オブジェクトの少なくとも1つの第2の環境オブジェクト空間座標を特定することと、前記第2の環境オブジェクト空間座標と、前記第1の環境オブジェクトの前記空間座標と、の間の関係を判定することと、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記77:前記関係は相対的変位を含む、本段落に記載のいずれかの付記に記載の方法。
付記78:前記関係は相対的配向を含む、本段落に記載のいずれかの付記に記載の方法。
付記79:前記センサは深度カメラを含む、本段落に記載のいずれかの付記に記載の方法。
付記80:前記少なくとも1つの第2の環境オブジェクト空間座標を特定することは、前記第2の環境オブジェクトに関連する深度マップを生成することを含む、本段落に記載のいずれかの付記に記載の方法。
付記81:前記第2の環境オブジェクトに関連付けられた前記深度マップと、少なくとも1つの補足的な深度マップと、を組み合わせることにより、拡張深度マップを生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記82:第2の環境オブジェクト空間座標と、前記第1の環境オブジェクトの前記空間座標と、の間の関係を判定することは、前記第2の環境オブジェクトに関連付けられた前記深度マップと、第1の環境オブジェクト深度マップと、を比較すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記83:前記第1の環境オブジェクトはフレームである、本段落に記載のいずれかの付記に記載の方法。
付記84:前記第1の環境オブジェクトは表面である、本段落に記載のいずれかの付記に記載の方法。
付記85:前記表面はテーブル表面である、本段落に記載のいずれかの付記に記載の方法。
付記86:前記表面は壁部である、本段落に記載のいずれかの付記に記載の方法。
付記87:前記表面はディスプレイ・スクリーンである、本段落に記載のいずれかの付記に記載の方法。
付記88:前記第2の環境オブジェクトはユーザ身体部分である、本段落に記載のいずれかの付記に記載の方法。
付記89:前記ユーザ身体部分はユーザの掌および親指であり、少なくとも1つの第2の環境オブジェクト空間座標を特定することは、前記ユーザの掌および親指の少なくとも1つの相対的位置を特定することを含む、本段落に記載のいずれかの付記に記載の方法。
付記90:第1の環境オブジェクトを環境内で追跡することは、前記第1の環境オブジェクトに関連付けられた少なくとも1つの点群を生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記91:前記第1の環境オブジェクトに関連付けられた前記少なくとも1つの点群と、少なくとも1つの補足的な点群と、を組み合わせることにより、拡張点群を生成すること、本段落に記載のいずれかの付記に記載の方法。
付記92:少なくとも1つの入力センサと、少なくとも1つの出力ディスプレイと、前記少なくとも1つの入力センサおよび前記少なくとも1つの出力ディスプレイに通信可能に連結された少なくとも1つの計算デバイスと、を含み、前記少なくとも1つの計算デバイスは、前記少なくとも1つの入力センサを介して、少なくとも1つの外肢の空間的位置を判定することと、前記空間的位置に基づいて少なくとも1つの表示項目を選択することと、前記少なくとも1つの出力ディスプレイを介して前記少なくとも1つの表示項目を提示することと、を含む、プロセッサ可読プログラム命令を発行するよう構成された、装置。
付記93:少なくとも1つの第1の環境オブジェクトおよび第2の環境オブジェクトの相対的空間位置を検出するよう構成された少なくとも1つのセンサと、前記相対的空間位置を認識すること、および少なくとも1つの表示構成要素を構成すること、を行うよう構成されたプログラム命令を発行する少なくとも1つの計算デバイスと、前記少なくとも1つのディスプレイ構成要素を表示するよう構成された少なくとも1つの出力ディスプレイと、を含む、装置。
付記94:前記少なくとも1つのセンサは、深度マップを生成するよう構成された深度カメラを含む、本段落に記載のいずれかの付記に記載の装置。
付記95:前記計算デバイスは前記深度マップに基づいて前記相対的空間位置を認識する、本段落に記載のいずれかの付記に記載の装置。
付記96:前記計算デバイスは、前記第1の環境オブジェクトに関連付けられた第1の点群と、前記第2の環境オブジェクトに関連付けられた第2の点群と、に基づいて前記相対的空間位置を認識する、本段落に記載のいずれかの付記に記載の装置。
付記97:前記計算デバイスは、前記第1の点群と前記第2の点群との交差に基づいて前記相対的空間位置をタッチ・ジェスチャとして認識する、本段落に記載のいずれかの付記に記載の装置。
付記98:前記少なくとも1つの表示構成要素は仮想的キーボードを含み、前記第2の環境オブジェクトはユーザ身体部分を含む、本段落に記載のいずれかの付記に記載の装置。
付記99:前記第1の物理的オブジェクトは表面であり、前記仮想的キーボードは、前記少なくとも1つの出力ディスプレイ内の前記表面に関連付けられた座標系に固定された、本段落に記載のいずれかの付記に記載の装置。
付記100:前記相対的空間位置は相対的空間動作をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記101:前記相対的空間動作はスワイプを含む、本段落に記載のいずれかの付記に記載の装置。
付記102:前記スワイプはバンチト・スワイプである、本段落に記載のいずれかの付記に記載の装置。
付記103:前記相対的空間動作はムービング・スクイーズおよびポッピング・スクイーズのうちの少なくとも1つを含む、本段落に記載のいずれかの付記に記載の装置。
付記104:前記第1の環境オブジェクトは表面を含み、前記少なくとも1つの計算デバイスは、前記表面を追跡するよう構成され、前記少なくとも1つの出力ディスプレイは、少なくとも1つの媒体提示を前記追跡される表面に固定するよう構成された、本段落に記載のいずれかの付記に記載の装置。
付記105:前記少なくとも1つの媒体提示は立体的提示に固定される、本段落に記載のいずれかの付記に記載の装置。
付記106:前記少なくとも1つの媒体提示はアプリケーション・データを含む、本段落に記載のいずれかの付記に記載の装置。
付記107:前記相対的空間位置は、前記表面と前記少なくとも1つの媒体提示との間の関連を示す、本段落に記載のいずれかの付記に記載の装置。
付記108:前記相対的空間位置は、前記少なくとも1つの媒体提示の前記表面へのドラッグ・アンド・ドロップを含む、本段落に記載のいずれかの付記に記載の装置。
付記109:前記第2の環境オブジェクトはジェスチャを示す手を含み、前記第1の環境オブジェクトは仮想的環境内の仮想的モデルを含み、前記少なくとも1つの計算デバイスは、前記ジェスチャを示す手と前記仮想的モデルとの間のいずれかの接点をスカルプトすることにより前記仮想的モデルを表現する前記少なくとも1つの表示構成要素を構成するためのプログラム命令を発行する、本段落に記載のいずれかの付記に記載の装置。
付記110:前記少なくとも1つの計算デバイスは、少なくとも1つの一意的な識別子を、前記第1の環境オブジェクトおよび前記第2の環境オブジェクトのうちの少なくとも1つに関連付けるためのプログラム命令を発行し、前記一意的な識別子は、ユーザに関連付けられたソーシャル・ネットワーク・データに接続された、本段落に記載のいずれかの付記に記載の装置。
付記111:少なくとも1つの一意的な識別子を関連付けるための前記プログラム命令は、前記少なくとも1つの出力ディスプレイを介して前記第1の環境オブジェクトおよび前記第2の環境オブジェクトのうちの少なくとも1つにマーカを適用するための命令を含む、本段落に記載のいずれかの付記に記載の装置。
付記112:前記計算デバイスは前記一意的な識別子を認識するためのプログラム命令を発行するよう構成され、前記出力ディスプレイは、前記ユーザに関連づけられた前記ソーシャル・ネットワーク・データのうちの少なくともいくつかを表示するよう構成された、本段落に記載のいずれかの付記に記載の装置。
付記113:前記少なくとも1つのセンサは親指立てジェスチャを検出するよう構成され、前記少なくとも1つの計算デバイスは、フィードバックと、前記一意的IDと、を関連付けるためのプログラム命令を発行する、本段落に記載のいずれかの付記に記載の装置。
付記114:眼鏡として構成された、本段落に記載のいずれかの付記に記載の装置。
付記115:ユーザ・インターフェースを管理するプロセッサにより実装される方法であって、少なくとも1つのジェスチャ追跡センサを介して選択されるよう構成された複数のアイコンを、少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために提供することと、前記複数のアイコンのうちから選択されたアイコンを選択することを示すユーザ・ジェスチャ・データを、前記少なくとも1つのジェスチャ追跡センサを介して受け取ることと、前記選択されたアイコンの前記選択に基づいてアイコンの階層にアクセスすることと、前記選択されたアイコンに基づいて、前記少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために前記アイコンの階層の一部を提供することと、を含む方法。
付記116:表示のために前記複数のアイコンを提供することは、前記少なくとも1つのジェスチャ追跡センサがアイコン呼出ジェスチャを検知したときに、さらに行われる、本段落に記載のいずれかの付記に記載の方法。
付記117:前記アイコン呼出ジェスチャは、開いた手を少なくとも閾値の時間的期間にわたり提示することを含む、本段落に記載のいずれかの付記に記載の方法。
付記118:前記複数のアイコンは少なくとも1つのサイクル・バブル・アニメーションを使用して提示される、本段落に記載のいずれかの付記に記載の方法。
付記119:前記アイコンは壁部バブル・アイコンである、本段落に記載のいずれかの付記に記載の方法。
付記120:前記ユーザ・ジェスチャ・データは相対的手運動マウスオーバー予備選択を含む、本段落に記載のいずれかの付記に記載の方法。
付記121:前記ユーザ・ジェスチャ・データはスクイーズ・トゥ・ムーブ平行移動を含む、本段落に記載のいずれかの付記に記載の方法。
付記122:前記ユーザ・ジェスチャ・データはスクイーズ・トゥ・ポップ選択を含む、本段落に記載のいずれかの付記に記載の方法。
付記123:前記複数のアイコンのうちの少なくとも1つはアプリケーション・ロゴを含む、本段落に記載のいずれかの付記に記載の方法。
付記124:前記少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために前記アイコンの階層の一部を提供することは、前記ユーザ・ジェスチャ・データに応答して前記選択されたアイコンの少なくとも1つのアニメーションを表示すること、を含む、本段落に記載のいずれかの付記に記載の方法。
付記125:前記前記少なくとも1つのアニメーションは内向き/ローロデックス・サイクルを含む、本段落に記載のいずれかの付記に記載の方法。
付記126:前記アイコンの階層はフォルダ・レベルおよびアプリケーション/ファイル・レベルを含む、本段落に記載のいずれかの付記に記載の方法。
付記127:前記アイコンの階層は設定レベルを含む、本段落に記載のいずれかの付記に記載の方法。
付記128:前記アイコンの階層は少なくとも1つの表示パラメータに関連付けられた設定サブレベルをさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記129:前記少なくとも1つの表示パラメータは連続的表示パラメータを含み、前記少なくとも1つのジェスチャ追跡センサを介して、前記少なくとも1つの表示パラメータに関連付けられた前記少なくとも1つの設定サブレベル・アイコンの選択を受け取ることと、前記設定サブレベル・アイコンと、少なくとも1つのユーザ身体部分と、の相対的空間位置を判定することと、前記出力ディスプレイを介して、前記設定サブレベル・アイコンから前記ユーザ身体部分まで延びる線を含むインターフェース要素を提供することと、前記相対的空間位置に基づいて前記少なくとも1つの表示パラメータと、前記線の長さと、を調節することと、をさらに含む、本段落に記載のいずれかの付記に記載の方法。
付記130:メモリと、前記メモリに連結され、且つ前記メモリに格納された複数のプログラム命令を発行するよう構成されたプロセッサと、を含み、前記プログラム命令は、環境内における第1の環境オブジェクトを少なくとも1つのセンサを介して追跡することと、少なくとも1つの環境オブジェクト識別子を前記第1の環境オブジェクトに割り当てることと、前記第1の環境オブジェクトに関連付けられた少なくとも1つ空間座標を特定することと、座標系と、前記環境オブジェクト識別子と、を、前記少なくとも1つの空間座標に基づいて関連付けることと、を含む、ジェスチャ認識装置。
付記131:第2の環境オブジェクトのジェスチャを前記少なくとも1つのセンサを介して前記座標系にマッピングすること、をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記132:ジェスチャをマッピングすることは、前記第2の環境オブジェクトに関連付けられた点群を生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記133:ジェスチャをマッピングすることは、前記第2の環境オブジェクトの少なくとも1つの第2の環境オブジェクト空間座標を特定することと、前記第2の環境オブジェクト空間座標と、前記第1の環境オブジェクトの前記空間座標と、の間の関係を判定することと、をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記134:前記関係は相対的変位を含む、本段落に記載のいずれかの付記に記載の装置。
付記135:前記関係は相対的配向を含む、本段落に記載のいずれかの付記に記載の装置。
付記136:前記センサは深度カメラを含む、本段落に記載のいずれかの付記に記載の装置。
付記137:前記少なくとも1つの第2の環境オブジェクト空間座標を特定することは、前記第2の環境オブジェクトに関連する深度マップを生成することを含む、本段落に記載のいずれかの付記に記載の装置。
付記138:前記第2の環境オブジェクトに関連付けられた前記深度マップと、少なくとも1つの補足的な深度マップと、を組み合わせることにより、拡張深度マップを生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記139:第2の環境オブジェクト空間座標と、前記第1の環境オブジェクトの前記空間座標と、の間の関係を判定することは、前記第2の環境オブジェクトに関連付けられた前記深度マップと、第1の環境オブジェクト深度マップと、を比較すること、をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記140:前記第1の環境オブジェクトはフレームである、本段落に記載のいずれかの付記に記載の装置。
付記141:前記第1の環境オブジェクトは表面である、本段落に記載のいずれかの付記に記載の装置。
付記142:前記表面はテーブル表面である、本段落に記載のいずれかの付記に記載の装置。
付記143:前記表面は壁部である、本段落に記載のいずれかの付記に記載の装置。
付記144:前記表面はディスプレイ・スクリーンである、本段落に記載のいずれかの付記に記載の装置。
付記145:前記第2の環境オブジェクトはユーザ身体部分である、本段落に記載のいずれかの付記に記載の装置。
付記146:前記ユーザ身体部分はユーザの掌および親指であり、少なくとも1つの第2の環境オブジェクト空間座標を特定することは、前記ユーザの掌および親指の少なくとも1つの相対的位置を特定することを含む、本段落に記載のいずれかの付記に記載の装置。
付記147:第1の環境オブジェクトを環境内で追跡することは、前記第1の環境オブジェクトに関連付けられた少なくとも1つの点群を生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記148:前記第1の環境オブジェクトに関連付けられた前記少なくとも1つの点群と、少なくとも1つの補足的な点群と、を組み合わせることにより、拡張点群を生成すること、本段落に記載のいずれかの付記に記載の装置。
付記149:メモリと、前記メモリに連結され、且つ前記メモリに格納された複数のプログラム命令を発行するよう構成されたプロセッサと、を含み、前記プログラム命令は、少なくとも1つのジェスチャ追跡センサを介して選択されるよう構成された複数のアイコンを、少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために提供することと、前記複数のアイコンのうちから選択されたアイコンを選択することを示すユーザ・ジェスチャ・データを、前記少なくとも1つのジェスチャ追跡センサを介して受け取ることと、前記選択されたアイコンの前記選択に基づいてアイコンの階層にアクセスすることと、前記選択されたアイコンに基づいて、前記少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために前記アイコンの階層の一部を提供することと、を含む、ユーザ・インターフェース管理装置。
付記150:表示のために前記複数のアイコンを提供することは、前記少なくとも1つのジェスチャ追跡センサがアイコン呼出ジェスチャを検知したときに、さらに行われる、本段落に記載のいずれかの付記に記載の装置。
付記151:前記アイコン呼出ジェスチャは、開いた手を少なくとも閾値の時間的期間にわたり提示することを含む、本段落に記載のいずれかの付記に記載の装置。
付記152:前記複数のアイコンは少なくとも1つのサイクル・バブル・アニメーションを使用して提示される、本段落に記載のいずれかの付記に記載の装置。
付記153:前記アイコンは壁部バブル・アイコンである、本段落に記載のいずれかの付記に記載の装置。
付記154:前記ユーザ・ジェスチャ・データは相対的手運動マウスオーバー予備選択を含む、本段落に記載のいずれかの付記に記載の装置。
付記155:前記ユーザ・ジェスチャ・データはスクイーズ・トゥ・ムーブ平行移動を含む、本段落に記載のいずれかの付記に記載の装置。
付記156:前記ユーザ・ジェスチャ・データはスクイーズ・トゥ・ポップ選択を含む、本段落に記載のいずれかの付記に記載の装置。
付記157:前記複数のアイコンのうちの少なくとも1つはアプリケーション・ロゴを含む、本段落に記載のいずれかの付記に記載の装置。
付記158:前記少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために前記アイコンの階層の一部を提供することは、前記ユーザ・ジェスチャ・データに応答して前記選択されたアイコンの少なくとも1つのアニメーションを表示すること、を含む、本段落に記載のいずれかの付記に記載の装置。
付記159:前記前記少なくとも1つのアニメーションは内向き/ローロデックス・サイクルを含む、本段落に記載のいずれかの付記に記載の装置。
付記160:前記アイコンの階層はフォルダ・レベルおよびアプリケーション/ファイル・レベルを含む、本段落に記載のいずれかの付記に記載の装置。
付記161:前記アイコンの階層は設定レベルを含む、本段落に記載のいずれかの付記に記載の装置。
付記162:前記アイコンの階層は少なくとも1つの表示パラメータに関連付けられた設定サブレベルをさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記163:前記少なくとも1つの表示パラメータは連続的表示パラメータを含み、前記少なくとも1つのジェスチャ追跡センサを介して、前記少なくとも1つの表示パラメータに関連付けられた前記少なくとも1つの設定サブレベル・アイコンの選択を受け取ることと、前記設定サブレベル・アイコンと、少なくとも1つのユーザ身体部分と、の相対的空間位置を判定することと、前記出力ディスプレイを介して、前記設定サブレベル・アイコンから前記ユーザ身体部分まで延びる線を含むインターフェース要素を提供することと、前記相対的空間位置に基づいて前記少なくとも1つの表示パラメータと、前記線の長さと、を調節することと、をさらに含む、本段落に記載のいずれかの付記に記載の装置。
付記164:ジェスチャ認識非一時的媒体であって、前記媒体に連結されたプロセッサにより発行可能であり、且つ、環境内の第1の環境オブジェクトを、少なくとも1つのセンサを介して追跡することと、少なくとも1つの環境オブジェクト識別子を前記第1の環境オブジェクトに割り当てることと、前記第1の環境オブジェクトに関連付けられた少なくとも1つの空間座標を特定することと、前記少なくとも1つの空間座標に基づいて、座標系と前記環境オブジェクト識別子とを関連付けることと、を前記プロセッサに実行させるプログラム命令を含む、媒体。
付記165:第2の環境オブジェクトのジェスチャを前記少なくとも1つのセンサを介して前記座標系にマッピングすること、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記166:ジェスチャをマッピングすることは、前記第2の環境オブジェクトに関連付けられた点群を生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記167:ジェスチャをマッピングすることは、前記第2の環境オブジェクトの少なくとも1つの第2の環境オブジェクト空間座標を特定することと、前記第2の環境オブジェクト空間座標と、前記第1の環境オブジェクトの前記空間座標と、の間の関係を判定することと、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記168:前記関係は相対的変位を含む、本段落に記載のいずれかの付記に記載の媒体。
付記169:前記関係は相対的配向を含む、本段落に記載のいずれかの付記に記載の媒体。
付記170:前記センサは深度カメラを含む、本段落に記載のいずれかの付記に記載の媒体。
付記171:前記少なくとも1つの第2の環境オブジェクト空間座標を特定することは、前記第2の環境オブジェクトに関連する深度マップを生成することを含む、本段落に記載のいずれかの付記に記載の媒体。
付記172:前記第2の環境オブジェクトに関連付けられた前記深度マップと、少なくとも1つの補足的な深度マップと、を組み合わせることにより、拡張深度マップを生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記173:第2の環境オブジェクト空間座標と、前記第1の環境オブジェクトの前記空間座標と、の間の関係を判定することは、前記第2の環境オブジェクトに関連付けられた前記深度マップと、第1の環境オブジェクト深度マップと、を比較すること、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記174:前記第1の環境オブジェクトはフレームである、本段落に記載のいずれかの付記に記載の媒体。
付記175:前記第1の環境オブジェクトは表面である、本段落に記載のいずれかの付記に記載の媒体。
付記176:前記表面はテーブル表面である、本段落に記載のいずれかの付記に記載の媒体。
付記177:前記表面は壁部である、本段落に記載のいずれかの付記に記載の媒体。
付記178:前記表面はディスプレイ・スクリーンである、本段落に記載のいずれかの付記に記載の媒体。
付記179:前記第2の環境オブジェクトはユーザ身体部分である、本段落に記載のいずれかの付記に記載の媒体。
付記180:前記ユーザ身体部分はユーザの掌および親指であり、少なくとも1つの第2の環境オブジェクト空間座標を特定することは、前記ユーザの掌および親指の少なくとも1つの相対的位置を特定することを含む、本段落に記載のいずれかの付記に記載の媒体。
付記181:第1の環境オブジェクトを環境内で追跡することは、前記第1の環境オブジェクトに関連付けられた少なくとも1つの点群を生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記182:前記第1の環境オブジェクトに関連付けられた前記少なくとも1つの点群と、少なくとも1つの補足的な点群と、を組み合わせることにより、拡張点群を生成すること、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記183:ユーザ・インターフェース管理媒体であって、前記媒体に連結されたプロセッサにより発行可能であり、且つ、少なくとも1つのジェスチャ追跡センサを介して選択されるよう構成された複数のアイコンを、少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために提供することと、前記複数のアイコンのうちから選択されたアイコンを選択することを示すユーザ・ジェスチャ・データを、前記少なくとも1つのジェスチャ追跡センサを介して受け取ることと、前記選択されたアイコンの前記選択に基づいてアイコンの階層にアクセスすることと、前記選択されたアイコンに基づいて、前記少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために前記アイコンの階層の一部を提供することと、を前記プロセッサに実行させるためのプログラム命令を含む、媒体。
付記184:表示のために前記複数のアイコンを提供することは、前記少なくとも1つのジェスチャ追跡センサがアイコン呼出ジェスチャを検知したときに、さらに行われる、本段落に記載のいずれかの付記に記載の媒体。
付記185:前記アイコン呼出ジェスチャは、開いた手を少なくとも閾値の時間的期間にわたり提示することを含む、本段落に記載のいずれかの付記に記載の媒体。
付記186:前記複数のアイコンは少なくとも1つのサイクル・バブル・アニメーションを使用して提示される、本段落に記載のいずれかの付記に記載の媒体。
付記187:前記アイコンは壁部バブル・アイコンである、本段落に記載のいずれかの付記に記載の媒体。
付記188:前記ユーザ・ジェスチャ・データは相対的手運動マウスオーバー予備選択を含む、本段落に記載のいずれかの付記に記載の媒体。
付記189:前記ユーザ・ジェスチャ・データはスクイーズ・トゥ・ムーブ平行移動を含む、本段落に記載のいずれかの付記に記載の媒体。
付記190:前記ユーザ・ジェスチャ・データはスクイーズ・トゥ・ポップ選択を含む、本段落に記載のいずれかの付記に記載の媒体。
付記191:前記複数のアイコンのうちの少なくとも1つはアプリケーション・ロゴを含む、本段落に記載のいずれかの付記に記載の媒体。
付記192:前記少なくとも1つの頭部搭載型出力ディスプレイを介して表示するために前記アイコンの階層の一部を提供することは、前記ユーザ・ジェスチャ・データに応答して前記選択されたアイコンの少なくとも1つのアニメーションを表示すること、を含む、本段落に記載のいずれかの付記に記載の媒体。
付記193:前記前記少なくとも1つのアニメーションは内向き/ローロデックス・サイクルを含む、本段落に記載のいずれかの付記に記載の媒体。
付記194:前記アイコンの階層はフォルダ・レベルおよびアプリケーション/ファイル・レベルを含む、本段落に記載のいずれかの付記に記載の媒体。
付記195:前記アイコンの階層は設定レベルを含む、本段落に記載のいずれかの付記に記載の媒体。
付記196:前記アイコンの階層は少なくとも1つの表示パラメータに関連付けられた設定サブレベルをさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記197:前記少なくとも1つの表示パラメータは連続的表示パラメータを含み、前記少なくとも1つのジェスチャ追跡センサを介して、前記少なくとも1つの表示パラメータに関連付けられた前記少なくとも1つの設定サブレベル・アイコンの選択を受け取ることと、前記設定サブレベル・アイコンと、少なくとも1つのユーザ身体部分と、の相対的空間位置を判定することと、前記出力ディスプレイを介して、前記設定サブレベル・アイコンから前記ユーザ身体部分まで延びる線を含むインターフェース要素を提供することと、前記相対的空間位置に基づいて前記少なくとも1つの表示パラメータと、前記線の長さと、を調節することと、をさらに含む、本段落に記載のいずれかの付記に記載の媒体。
付記(198):前記アイコンはアバコグラフである、請求項115に記載の方法。
付記(199):前記アイコンはアバコグラフから導出される、請求項115に記載の方法。
付記(200):前記アイコンはトポスカルプチャである、請求項115に記載の方法。
付記(201):前記アイコンはそれぞれ、アバコグラフィック露光の1つの軌跡に対応する、請求項115に記載の方法。
付記(202):前記アイコンはそれぞれ、アバコグラフ上のビーズである、請求項115に記載の方法。
付記(203):前記アイコンは、選択されたとき、前記アバコグラフに沿って移動可能として描画される、請求項134に記載の方法。
100 光センサ
110 着脱可能シェード
120 センサ・インターフェース・ユニット
130 表面
140 パブリック対象物
141 多様体
142 身体部分
143 身体部分
144 軌跡
145 身体部分
145 多様体
146 多様体
147 身体部分
150 ネットワーク接続
160 コンピュータ
170 投影
180AM アバコグラフィック多様体、または多様体
180DEG デジタル眼鏡、眼鏡、または空間撮像眼鏡
180D ディスプレイ、ディスプレイ・ユニット、またはステレオ・ディスプレイ
180F 指
180G ジオフォン
180H ヘッド・ストラップ
180IMU 慣性センサ
180IRR 赤外線受信器
180IRT 赤外線送信器
180L LiDARユニット
180MD 手
180MS 手
180M マインドストラップ
180O オブジェクト
180P オブジェクト
180Q オブジェクト
180T テザークリップ
180TT 親指
180U ユーザ
180VR 可視光受信器
180VT 可視光送信器
180V ビジョン・システム
180 デジタル眼鏡
180U ユーザ
181BB オブジェクト
181DEG 眼鏡、デジタル眼鏡、または空間撮像眼鏡
181G ジオフォン
181IRR 受信器
181L LiDARユニット
181MD 手
181MS 手
181M メニュー選択
181SM スパット・メニュー
181U ユーザ
181 ディスプレイ・ユニット
182 ジオフォン
183 頭部搭載可能アセンブリ
184 慣性測定ユニット
185 赤外線受信器
186 赤外線送信器
187 LiDARユニット
188 後頭部バンド
189 クリップ
190 デジタル眼鏡
191 可視光受信器
192 可視光送信器
193 ビジョン・システム
194 ジオフォン
195 赤外線受信器
196 デジタル眼鏡
197 LiDARユニット
198 眼または裸眼
199A 右眼アイ・ポイント
199B 左眼アイ・ポイント
200 ツール・ポイント
201 描画ツール
202 仮想的対象物
203 ジオフォン・センサ
204 慣性測定ユニット
240 パブリック対象物
2D8 ランプ
2F8 ランプ
330 食料品
331 バーナ
334 レンジ上面
340 シークレット対象物
341 流し台
400 接触検出器
401 射影変換侵入検出器
402 合流性センサ
403 ビデオ軌道安定化プログラム
404 コンパラメトリック合成器
405 スーパーポジメトリック合成器
406 コンパラメトリック分析プログラム
407 スーパーポジメトリック分析器
408 スーパーポジメトリック空間撮像プログラム
409 コンパラメトリック合成器
410 空間撮像マルチプレクサ
411 時分割マルチプレクサ
412 共同作業的ジェスチャ・ベース・インターフェース
413 ジェスチャ追跡検出器
414 ニューラル・ネットワーク
415 最適オプティマイザ
416 傾斜降下器
417 正規化器
418 オーバーフロー・ペナライザ
419 人間ジェスチャ認識プログラム
420 バブル・メタファー生成器
421 球形体積侵入評価器
422 体積侵入検出器
423 バブル破裂プログラム
424 学習ソフトウェア
430 パターン
500 パルス列信号
502 動作
504 動作
506 動作
508 動作
509 パルス列信号
510 微弱照度信号
511 微弱照度信号
513 方法
520 中間照度信号
521 中間照度信号
530 強力照度信号
531 強力照度信号
540 微弱照度信号
541 微弱照度信号
550 中間照度信号
551 中間照度信号
560 強力照度信号
561 強力照度信号
570 第1の時間スロット
571 第2の時間スロット
572 第3の時間スロット
573 第4の時間スロット
574 第5の時間スロット
575 第6の時間スロット
580 方法
582 動作
584 動作
586 動作
588 動作
600 オブジェクト
601 表面
602 認識可能表面テクスチャ
603 画像アイコン
610 ジェスチャ入力
611 ジェスチャ入力
612 ジェスチャ入力
630 ワイヤレス通信モジュール
631 ワイヤレス通信モジュール
632 ワイヤレス通信モジュール
700 実際のオブジェクト
710 手
720 破裂するバブル
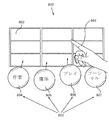
800 ユーザ・インターフェース
801 ユーザー
802 ビュー表示
803 バルブ・セット
804 作業バブル
805 媒体バブル
806 プレイ・バブル
807 ソーシャル・バブル
808 設定バブル
810 設定タイプ
811 設定タイプ
811 設定タイプ
813 設定タイプ
8×8 8
902 インターフェース・アセンブリ
903 第1のインターフェース・モジュール
904 センサ信号
905 第2のインターフェース・モジュール
906 エフェクタ信号
907 処理用プログラムまたはプログラム
908 処理装置
909 メモリ・アセンブリまたは非一時的機械可読ストレージ媒体
910 第1の感覚現象センサまたは感覚現象センサ
911 電子ネットワーク接続
912 第1の感覚現象エフェクタまたは感覚現象エフェクタ
914 第2の感覚現象エフェクタまたは感覚現象エフェクタ
916 第2の感覚現象センサまたは感覚現象センサ
1000 第1の拡張介在現実空間
1002 第2の拡張介在現実空間
1100 方法
1102 動作
1104 動作
1106 動作
1108 動作
1110 動作
1300 装置または表示装置
1302 第1の現象インターフェース
1304 処理アセンブリ
1306 第2の現象インターフェース
1308 深度マップ
1C10 位相センサ
1C20 マニプレー
1C30 持続検出器
1C40 マニプレー終止器
1C50 ジェスチャ・センサ
1C60 オブジェクト削除器
1C70 スパット・メニュー
1C80 部分多様体移動器
1C90 多様体移動器
2B00 対象物
2B05 対象物
2B06 対象物
2B10 対象物
2B11 コーナー
2B12 コーナー
2B13 コーナー
2B14 コーナー
2B15 対象物
2B16 対象物
2B20 対象物
2B25 対象物
2B26 対象物
2B30 対象物
2B35 対象物
2B36 対象物
2C10 プロセス
2C15 プロセス変数
2C20 加算器
2C25 エラー信号
2C30 運動プロセッサ
2C35 プロセッサ
2C40 処理済み運動信号
2C45 加算器
2C50 信号
2C55 量
2C60 量
2C70 信号
2D21 光線
2D22 光線
2D23 可視光線
2D24 光線
2D32 光線
2D34 光線
2D40 露光
2D51 文字露光
2D55 文字露光
2D60 文字露光
2D70 テーブルトップ表面
2D90 露光
2D91 アバコグラフ
2D92 アバコグラフ
2E10 アバコグラフ
2E11 微弱露光
2E12 露光
2E13 露光
2F64 ランプ
1EE10 音響侵害入力
1EE20 視覚侵害入力
1EE25 音響侵害センサ
1EE30 視覚侵害センサ
1EE35 多次元侵害信号
1EE40 ノード
1EE45 接続
1EE50 ノード
1EE60 接続
1EE70 ノード
1EE80 接触信号
1EE85 接触信号
1EE90 接触信号
1EE91 侵入検出器
1EE92 タッチ検出器
1EE93 押出検出器
1EE94 信号
1EE95 信号
1EE96 信号
1EE97 ジェスチャ・センサ
1EE98 様々な出力信号
2G110 メタブルなラベル
2G120 オブジェクト
2G130 メタブルな円形オブジェクト
2G140 オブジェクト
2G150 オブジェクト
2G160 トポスカルプト用杖
2G161 リング
2G162 トリガ
2G163 着脱可能グリップ
2G164 ハンドル
2G165 シャフト
2G168 アバコグラフ
2G169 追加的装置または装置
2G181 多様体
2G182 多様体
2G184 多様体
2G189 多様体
2G190 ジェスチャ・バンド
2G193 オブジェクト
2G199 中指
Claims (1)
- 明細書および/または図面に記載の発明。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361748468P | 2013-01-03 | 2013-01-03 | |
| US61/748,468 | 2013-01-03 | ||
| US201361916773P | 2013-12-16 | 2013-12-16 | |
| US61/916,773 | 2013-12-16 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015551242A Division JP2016509292A (ja) | 2013-01-03 | 2014-01-03 | エクストラミッシブ空間撮像デジタル眼鏡装置または拡張介在ビジョン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019149202A true JP2019149202A (ja) | 2019-09-05 |
| JP2019149202A5 JP2019149202A5 (ja) | 2020-04-23 |
Family
ID=51016608
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015551242A Pending JP2016509292A (ja) | 2013-01-03 | 2014-01-03 | エクストラミッシブ空間撮像デジタル眼鏡装置または拡張介在ビジョン |
| JP2019091204A Pending JP2019149202A (ja) | 2013-01-03 | 2019-05-14 | エクストラミッシブ空間撮像デジタル眼鏡装置または拡張介在ビジョン |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015551242A Pending JP2016509292A (ja) | 2013-01-03 | 2014-01-03 | エクストラミッシブ空間撮像デジタル眼鏡装置または拡張介在ビジョン |
Country Status (8)
| Country | Link |
|---|---|
| US (8) | US9720505B2 (ja) |
| EP (1) | EP2951811A4 (ja) |
| JP (2) | JP2016509292A (ja) |
| KR (1) | KR20150103723A (ja) |
| CN (1) | CN105027190B (ja) |
| AU (1) | AU2014204252B2 (ja) |
| CA (1) | CA2896985A1 (ja) |
| WO (1) | WO2014106823A2 (ja) |
Families Citing this family (509)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8730156B2 (en) * | 2010-03-05 | 2014-05-20 | Sony Computer Entertainment America Llc | Maintaining multiple views on a shared stable virtual space |
| US9733091B2 (en) * | 2007-05-31 | 2017-08-15 | Trx Systems, Inc. | Collaborative creation of indoor maps |
| US9158116B1 (en) | 2014-04-25 | 2015-10-13 | Osterhout Group, Inc. | Temple and ear horn assembly for headworn computer |
| US9352411B2 (en) | 2008-05-28 | 2016-05-31 | Illinois Tool Works Inc. | Welding training system |
| US9280913B2 (en) * | 2009-07-10 | 2016-03-08 | Lincoln Global, Inc. | Systems and methods providing enhanced education and training in a virtual reality environment |
| US9400390B2 (en) | 2014-01-24 | 2016-07-26 | Osterhout Group, Inc. | Peripheral lighting for head worn computing |
| US9366867B2 (en) | 2014-07-08 | 2016-06-14 | Osterhout Group, Inc. | Optical systems for see-through displays |
| US9715112B2 (en) | 2014-01-21 | 2017-07-25 | Osterhout Group, Inc. | Suppression of stray light in head worn computing |
| US11064910B2 (en) | 2010-12-08 | 2021-07-20 | Activbody, Inc. | Physical activity monitoring system |
| US8670023B2 (en) * | 2011-01-17 | 2014-03-11 | Mediatek Inc. | Apparatuses and methods for providing a 3D man-machine interface (MMI) |
| JP5785753B2 (ja) * | 2011-03-25 | 2015-09-30 | 京セラ株式会社 | 電子機器、制御方法および制御プログラム |
| US9597587B2 (en) | 2011-06-08 | 2017-03-21 | Microsoft Technology Licensing, Llc | Locational node device |
| US8869073B2 (en) * | 2011-07-28 | 2014-10-21 | Hewlett-Packard Development Company, L.P. | Hand pose interaction |
| US9101994B2 (en) | 2011-08-10 | 2015-08-11 | Illinois Tool Works Inc. | System and device for welding training |
| US11493998B2 (en) | 2012-01-17 | 2022-11-08 | Ultrahaptics IP Two Limited | Systems and methods for machine control |
| US9573215B2 (en) | 2012-02-10 | 2017-02-21 | Illinois Tool Works Inc. | Sound-based weld travel speed sensing system and method |
| US9230064B2 (en) | 2012-06-19 | 2016-01-05 | EZ as a Drink Productions, Inc. | Personal wellness device |
| US10102345B2 (en) | 2012-06-19 | 2018-10-16 | Activbody, Inc. | Personal wellness management platform |
| US10133849B2 (en) | 2012-06-19 | 2018-11-20 | Activbody, Inc. | Merchandizing, socializing, and/or gaming via a personal wellness device and/or a personal wellness platform |
| CN105378593B (zh) | 2012-07-13 | 2019-03-01 | 索尼深度传感解决方案股份有限公司 | 利用手上的奇异兴趣点基于手势进行人机同步交互的方法和系统 |
| US9530232B2 (en) * | 2012-09-04 | 2016-12-27 | Qualcomm Incorporated | Augmented reality surface segmentation |
| US9710069B2 (en) | 2012-10-30 | 2017-07-18 | Apple Inc. | Flexible printed circuit having flex tails upon which keyboard keycaps are coupled |
| US9502193B2 (en) | 2012-10-30 | 2016-11-22 | Apple Inc. | Low-travel key mechanisms using butterfly hinges |
| US9368045B2 (en) | 2012-11-09 | 2016-06-14 | Illinois Tool Works Inc. | System and device for welding training |
| US9583014B2 (en) | 2012-11-09 | 2017-02-28 | Illinois Tool Works Inc. | System and device for welding training |
| CA2896985A1 (en) | 2013-01-03 | 2014-07-10 | Meta Company | Extramissive spatial imaging digital eye glass for virtual or augmediated vision |
| CN109375713A (zh) * | 2013-02-06 | 2019-02-22 | 苹果公司 | 具有可动态调整的外观和功能的输入/输出设备 |
| US20140375684A1 (en) * | 2013-02-17 | 2014-12-25 | Cherif Atia Algreatly | Augmented Reality Technology |
| US9734582B2 (en) * | 2013-02-21 | 2017-08-15 | Lg Electronics Inc. | Remote pointing method |
| US9626489B2 (en) | 2013-03-13 | 2017-04-18 | Intertrust Technologies Corporation | Object rendering systems and methods |
| US9713852B2 (en) | 2013-03-15 | 2017-07-25 | Illinois Tool Works Inc. | Welding training systems and devices |
| US9666100B2 (en) | 2013-03-15 | 2017-05-30 | Illinois Tool Works Inc. | Calibration devices for a welding training system |
| US9672757B2 (en) | 2013-03-15 | 2017-06-06 | Illinois Tool Works Inc. | Multi-mode software and method for a welding training system |
| US9728103B2 (en) * | 2013-03-15 | 2017-08-08 | Illinois Tool Works Inc. | Data storage and analysis for a welding training system |
| US9583023B2 (en) | 2013-03-15 | 2017-02-28 | Illinois Tool Works Inc. | Welding torch for a welding training system |
| JP6110704B2 (ja) * | 2013-03-29 | 2017-04-05 | 任天堂株式会社 | プログラム、情報処理装置、情報処理方法及び情報処理システム |
| USD852828S1 (en) * | 2013-04-05 | 2019-07-02 | Thales Avionics, Inc. | Display screen or portion thereof with graphical user interface |
| US9188426B2 (en) * | 2013-04-23 | 2015-11-17 | Bradley Allen Safranski | Non-contact visual measurement device |
| US9229476B2 (en) | 2013-05-08 | 2016-01-05 | EZ as a Drink Productions, Inc. | Personal handheld electronic device with a touchscreen on a peripheral surface |
| JP6103543B2 (ja) | 2013-05-27 | 2017-03-29 | アップル インコーポレイテッド | 短行程スイッチアッセンブリ |
| US9377294B2 (en) * | 2013-06-18 | 2016-06-28 | Xerox Corporation | Handheld cellular apparatus for volume estimation |
| US11090753B2 (en) | 2013-06-21 | 2021-08-17 | Illinois Tool Works Inc. | System and method for determining weld travel speed |
| US9262064B2 (en) * | 2013-07-09 | 2016-02-16 | EZ as a Drink Productions, Inc. | Handheld computing platform with integrated pressure sensor and associated methods of use |
| US9908310B2 (en) | 2013-07-10 | 2018-03-06 | Apple Inc. | Electronic device with a reduced friction surface |
| US9405398B2 (en) * | 2013-09-03 | 2016-08-02 | FTL Labs Corporation | Touch sensitive computing surface for interacting with physical surface devices |
| KR102165818B1 (ko) * | 2013-09-10 | 2020-10-14 | 삼성전자주식회사 | 입력 영상을 이용한 사용자 인터페이스 제어 방법, 장치 및 기록매체 |
| US20150072323A1 (en) * | 2013-09-11 | 2015-03-12 | Lincoln Global, Inc. | Learning management system for a real-time simulated virtual reality welding training environment |
| WO2015047606A1 (en) | 2013-09-30 | 2015-04-02 | Apple Inc. | Keycaps having reduced thickness |
| JP2016532232A (ja) | 2013-09-30 | 2016-10-13 | アップル インコーポレイテッド | 厚みを薄くしたキーキャップ |
| US9883173B2 (en) * | 2013-12-25 | 2018-01-30 | 3Di Llc | Stereoscopic display |
| US10652525B2 (en) | 2013-10-31 | 2020-05-12 | 3Di Llc | Quad view display system |
| US10116914B2 (en) * | 2013-10-31 | 2018-10-30 | 3Di Llc | Stereoscopic display |
| US9639773B2 (en) * | 2013-11-26 | 2017-05-02 | Disney Enterprises, Inc. | Predicting a light probe for an outdoor image |
| US10056010B2 (en) | 2013-12-03 | 2018-08-21 | Illinois Tool Works Inc. | Systems and methods for a weld training system |
| US20160320833A1 (en) * | 2013-12-18 | 2016-11-03 | Joseph Schuman | Location-based system for sharing augmented reality content |
| US9304674B1 (en) * | 2013-12-18 | 2016-04-05 | Amazon Technologies, Inc. | Depth-based display navigation |
| US10170019B2 (en) | 2014-01-07 | 2019-01-01 | Illinois Tool Works Inc. | Feedback from a welding torch of a welding system |
| US9751149B2 (en) | 2014-01-07 | 2017-09-05 | Illinois Tool Works Inc. | Welding stand for a welding system |
| US10105782B2 (en) | 2014-01-07 | 2018-10-23 | Illinois Tool Works Inc. | Feedback from a welding torch of a welding system |
| EP2891950B1 (en) * | 2014-01-07 | 2018-08-15 | Sony Depthsensing Solutions | Human-to-computer natural three-dimensional hand gesture based navigation method |
| US9589481B2 (en) | 2014-01-07 | 2017-03-07 | Illinois Tool Works Inc. | Welding software for detection and control of devices and for analysis of data |
| US9757819B2 (en) | 2014-01-07 | 2017-09-12 | Illinois Tool Works Inc. | Calibration tool and method for a welding system |
| US9724788B2 (en) | 2014-01-07 | 2017-08-08 | Illinois Tool Works Inc. | Electrical assemblies for a welding system |
| US9704132B2 (en) * | 2014-01-11 | 2017-07-11 | Federico Fraccaroli | Method, system and apparatus for adapting the functionalities of a connected object associated with a user ID |
| KR101550580B1 (ko) * | 2014-01-17 | 2015-09-08 | 한국과학기술연구원 | 사용자 인터페이스 장치 및 그것의 제어 방법 |
| US20150228119A1 (en) | 2014-02-11 | 2015-08-13 | Osterhout Group, Inc. | Spatial location presentation in head worn computing |
| US10649220B2 (en) | 2014-06-09 | 2020-05-12 | Mentor Acquisition One, Llc | Content presentation in head worn computing |
| US10684687B2 (en) | 2014-12-03 | 2020-06-16 | Mentor Acquisition One, Llc | See-through computer display systems |
| US9841599B2 (en) | 2014-06-05 | 2017-12-12 | Osterhout Group, Inc. | Optical configurations for head-worn see-through displays |
| US10254856B2 (en) | 2014-01-17 | 2019-04-09 | Osterhout Group, Inc. | External user interface for head worn computing |
| US9594246B2 (en) | 2014-01-21 | 2017-03-14 | Osterhout Group, Inc. | See-through computer display systems |
| US9829707B2 (en) | 2014-08-12 | 2017-11-28 | Osterhout Group, Inc. | Measuring content brightness in head worn computing |
| US11892644B2 (en) | 2014-01-21 | 2024-02-06 | Mentor Acquisition One, Llc | See-through computer display systems |
| US11487110B2 (en) | 2014-01-21 | 2022-11-01 | Mentor Acquisition One, Llc | Eye imaging in head worn computing |
| US11669163B2 (en) | 2014-01-21 | 2023-06-06 | Mentor Acquisition One, Llc | Eye glint imaging in see-through computer display systems |
| US11737666B2 (en) | 2014-01-21 | 2023-08-29 | Mentor Acquisition One, Llc | Eye imaging in head worn computing |
| US9753288B2 (en) | 2014-01-21 | 2017-09-05 | Osterhout Group, Inc. | See-through computer display systems |
| US20160018653A1 (en) | 2014-01-24 | 2016-01-21 | Osterhout Group, Inc. | See-through computer display systems |
| US9846308B2 (en) | 2014-01-24 | 2017-12-19 | Osterhout Group, Inc. | Haptic systems for head-worn computers |
| US9793066B1 (en) | 2014-01-31 | 2017-10-17 | Apple Inc. | Keyboard hinge mechanism |
| KR20150091724A (ko) * | 2014-02-03 | 2015-08-12 | 한국전자통신연구원 | 착용형 안경장치 |
| US10627904B2 (en) * | 2014-02-07 | 2020-04-21 | Ultrahaptics IP Two Limited | Systems and methods of determining interaction intent in three-dimensional (3D) sensory space |
| JP6264087B2 (ja) * | 2014-02-21 | 2018-01-24 | ソニー株式会社 | 表示制御装置、表示装置および表示制御システム |
| KR102438482B1 (ko) * | 2014-03-17 | 2022-09-02 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 비백색광 일반 조명기를 포함하는 수술 시스템 |
| US9779889B2 (en) | 2014-03-24 | 2017-10-03 | Apple Inc. | Scissor mechanism features for a keyboard |
| US10022622B2 (en) | 2014-04-21 | 2018-07-17 | Steelseries Aps | Programmable actuation inputs of an accessory and methods thereof |
| US10124246B2 (en) | 2014-04-21 | 2018-11-13 | Activbody, Inc. | Pressure sensitive peripheral devices, and associated methods of use |
| US10675532B2 (en) | 2014-04-21 | 2020-06-09 | Steelseries Aps | Variable actuators of an accessory and methods thereof |
| US9651787B2 (en) | 2014-04-25 | 2017-05-16 | Osterhout Group, Inc. | Speaker assembly for headworn computer |
| US10853589B2 (en) | 2014-04-25 | 2020-12-01 | Mentor Acquisition One, Llc | Language translation with head-worn computing |
| US20160137312A1 (en) | 2014-05-06 | 2016-05-19 | Osterhout Group, Inc. | Unmanned aerial vehicle launch system |
| KR102173110B1 (ko) * | 2014-05-07 | 2020-11-02 | 삼성전자주식회사 | 웨어러블 디바이스 및 그 제어 방법 |
| US20150334785A1 (en) * | 2014-05-15 | 2015-11-19 | Cooktek Induction Systems, Llc | Menu-based cooking appliance |
| US9557955B2 (en) * | 2014-05-21 | 2017-01-31 | International Business Machines Corporation | Sharing of target objects |
| US9575560B2 (en) | 2014-06-03 | 2017-02-21 | Google Inc. | Radar-based gesture-recognition through a wearable device |
| US10085584B2 (en) | 2014-06-09 | 2018-10-02 | Whirlpool Corporation | Method of regulating temperature for sous vide cooking and apparatus therefor |
| US10663740B2 (en) | 2014-06-09 | 2020-05-26 | Mentor Acquisition One, Llc | Content presentation in head worn computing |
| US10852838B2 (en) * | 2014-06-14 | 2020-12-01 | Magic Leap, Inc. | Methods and systems for creating virtual and augmented reality |
| US10665128B2 (en) | 2014-06-27 | 2020-05-26 | Illinois Tool Works Inc. | System and method of monitoring welding information |
| US9937578B2 (en) | 2014-06-27 | 2018-04-10 | Illinois Tool Works Inc. | System and method for remote welding training |
| US9862049B2 (en) | 2014-06-27 | 2018-01-09 | Illinois Tool Works Inc. | System and method of welding system operator identification |
| US10307853B2 (en) | 2014-06-27 | 2019-06-04 | Illinois Tool Works Inc. | System and method for managing welding data |
| CN104121892B (zh) * | 2014-07-09 | 2017-01-25 | 深圳市欢创科技有限公司 | 一种获取光枪射击的目标位置的方法、装置及系统 |
| EP2977789A1 (en) * | 2014-07-25 | 2016-01-27 | Nxp B.V. | Distance measurement |
| US11014183B2 (en) | 2014-08-07 | 2021-05-25 | Illinois Tool Works Inc. | System and method of marking a welding workpiece |
| US9811164B2 (en) | 2014-08-07 | 2017-11-07 | Google Inc. | Radar-based gesture sensing and data transmission |
| US9724787B2 (en) | 2014-08-07 | 2017-08-08 | Illinois Tool Works Inc. | System and method of monitoring a welding environment |
| US9921660B2 (en) | 2014-08-07 | 2018-03-20 | Google Llc | Radar-based gesture recognition |
| EP3180678A1 (en) | 2014-08-15 | 2017-06-21 | Apple Inc. | Fabric keyboard |
| US9588625B2 (en) | 2014-08-15 | 2017-03-07 | Google Inc. | Interactive textiles |
| US10268321B2 (en) | 2014-08-15 | 2019-04-23 | Google Llc | Interactive textiles within hard objects |
| US9875665B2 (en) | 2014-08-18 | 2018-01-23 | Illinois Tool Works Inc. | Weld training system and method |
| US11169988B2 (en) | 2014-08-22 | 2021-11-09 | Google Llc | Radar recognition-aided search |
| US9778749B2 (en) | 2014-08-22 | 2017-10-03 | Google Inc. | Occluded gesture recognition |
| US10082880B1 (en) | 2014-08-28 | 2018-09-25 | Apple Inc. | System level features of a keyboard |
| CN104190078B (zh) * | 2014-08-28 | 2017-05-31 | 深圳市欢创科技有限公司 | 一种光枪射击的目标识别方法、装置及系统 |
| US10228766B2 (en) * | 2014-09-12 | 2019-03-12 | Microsoft Technology Licensing, Llc | Enhanced Display Rotation |
| JP3213042U (ja) | 2014-09-30 | 2017-10-19 | アップル インコーポレイテッド | キーボードアセンブリ用のキー及びスイッチハウジング |
| US10201868B2 (en) * | 2014-09-30 | 2019-02-12 | Illinois Tool Works Inc. | Systems and methods for gesture control of a welding system |
| US10987762B2 (en) * | 2014-09-30 | 2021-04-27 | Illinois Tool Works Inc. | Armband based systems and methods for controlling welding equipment using gestures and like motions |
| US9818225B2 (en) | 2014-09-30 | 2017-11-14 | Sony Interactive Entertainment Inc. | Synchronizing multiple head-mounted displays to a unified space and correlating movement of objects in the unified space |
| US9600080B2 (en) | 2014-10-02 | 2017-03-21 | Google Inc. | Non-line-of-sight radar-based gesture recognition |
| USD772889S1 (en) | 2014-10-06 | 2016-11-29 | National Comprehensive Cancer Network | Display screen or portion thereof with graphical user interface for clinical practice guidelines |
| USD770469S1 (en) * | 2014-10-06 | 2016-11-01 | National Comprehensive Cancer Network | Display screen or portion thereof with icon |
| USD770468S1 (en) | 2014-10-06 | 2016-11-01 | National Comprehensive Cancer Network | Display screen or portion thereof with graphical user interface for clinical practice guidelines |
| USD780768S1 (en) * | 2014-10-06 | 2017-03-07 | National Comprehensive Cancer Network | Display screen or portion thereof with icon |
| US20160103855A1 (en) * | 2014-10-08 | 2016-04-14 | Lenovo (Singapore) Pte, Ltd. | Collaborative item database |
| US11247289B2 (en) * | 2014-10-16 | 2022-02-15 | Illinois Tool Works Inc. | Remote power supply parameter adjustment |
| US10239147B2 (en) | 2014-10-16 | 2019-03-26 | Illinois Tool Works Inc. | Sensor-based power controls for a welding system |
| DE102014115363A1 (de) * | 2014-10-22 | 2016-04-28 | Bitsea Gmbh | Virtuelles Zeichen in realer Umgebung |
| US10417934B2 (en) | 2014-11-05 | 2019-09-17 | Illinois Tool Works Inc. | System and method of reviewing weld data |
| US10490098B2 (en) | 2014-11-05 | 2019-11-26 | Illinois Tool Works Inc. | System and method of recording multi-run data |
| US10373304B2 (en) | 2014-11-05 | 2019-08-06 | Illinois Tool Works Inc. | System and method of arranging welding device markers |
| US10204406B2 (en) | 2014-11-05 | 2019-02-12 | Illinois Tool Works Inc. | System and method of controlling welding system camera exposure and marker illumination |
| KR101636460B1 (ko) * | 2014-11-05 | 2016-07-05 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| US10210773B2 (en) | 2014-11-05 | 2019-02-19 | Illinois Tool Works Inc. | System and method for welding torch display |
| US10402959B2 (en) | 2014-11-05 | 2019-09-03 | Illinois Tool Works Inc. | System and method of active torch marker control |
| WO2016074090A1 (en) | 2014-11-11 | 2016-05-19 | Helio Technology Inc. | An angle encoder and a method of measuring an angle using same |
| CN107209960B (zh) | 2014-12-18 | 2021-01-01 | 脸谱科技有限责任公司 | 用于提供虚拟现实环境的用户界面的系统、设备及方法 |
| US10809794B2 (en) | 2014-12-19 | 2020-10-20 | Hewlett-Packard Development Company, L.P. | 3D navigation mode |
| CN104461009B (zh) * | 2014-12-22 | 2018-01-09 | 百度在线网络技术(北京)有限公司 | 物体的测量方法和智能设备 |
| WO2016105521A1 (en) | 2014-12-23 | 2016-06-30 | Meta Company | Apparatuses, methods and systems coupling visual accommodation and visual convergence to the same plane at any depth of an object of interest |
| SG11201705579QA (en) * | 2015-01-09 | 2017-08-30 | Razer (Asia-Pacific) Pte Ltd | Gesture recognition devices and gesture recognition methods |
| US10039975B2 (en) | 2015-01-13 | 2018-08-07 | Disney Enterprises, Inc. | Techniques for representing imaginary participants in an immersive play environment |
| US9855497B2 (en) | 2015-01-20 | 2018-01-02 | Disney Enterprises, Inc. | Techniques for providing non-verbal speech recognition in an immersive playtime environment |
| US10265621B2 (en) | 2015-01-20 | 2019-04-23 | Disney Enterprises, Inc. | Tracking specific gestures relative to user movement |
| US10773329B2 (en) | 2015-01-20 | 2020-09-15 | Illinois Tool Works Inc. | Multiple input welding vision system |
| US9858718B2 (en) * | 2015-01-27 | 2018-01-02 | Microsoft Technology Licensing, Llc | Dynamically adaptable virtual lists |
| US20170061700A1 (en) * | 2015-02-13 | 2017-03-02 | Julian Michael Urbach | Intercommunication between a head mounted display and a real world object |
| US10878775B2 (en) | 2015-02-17 | 2020-12-29 | Mentor Acquisition One, Llc | See-through computer display systems |
| US9911232B2 (en) * | 2015-02-27 | 2018-03-06 | Microsoft Technology Licensing, Llc | Molding and anchoring physically constrained virtual environments to real-world environments |
| US10406638B2 (en) | 2015-02-27 | 2019-09-10 | Illinois Tool Works Inc. | Augmented vision system with active welder guidance |
| WO2016144741A1 (en) * | 2015-03-06 | 2016-09-15 | Illinois Tool Works Inc. | Sensor assisted head mounted displays for welding |
| US10194799B2 (en) * | 2015-03-09 | 2019-02-05 | Sanovas Intellectual Property, Llc | Robotic ophthalmology |
| WO2016144744A1 (en) | 2015-03-09 | 2016-09-15 | Illinois Tool Works Inc. | Methods and apparatus to provide visual information associated with welding operations |
| US10016162B1 (en) | 2015-03-23 | 2018-07-10 | Google Llc | In-ear health monitoring |
| US9983747B2 (en) | 2015-03-26 | 2018-05-29 | Google Llc | Two-layer interactive textiles |
| US9977242B2 (en) | 2015-03-26 | 2018-05-22 | Illinois Tool Works Inc. | Control of mediated reality welding system based on lighting conditions |
| US10116519B2 (en) | 2015-03-27 | 2018-10-30 | Yodiwo Ab | Programmable distributed management system of interconnected things and applications |
| US10427239B2 (en) | 2015-04-02 | 2019-10-01 | Illinois Tool Works Inc. | Systems and methods for tracking weld training arc parameters |
| US20160299565A1 (en) * | 2015-04-07 | 2016-10-13 | Siemens Aktiengesellschaft | Eye tracking for registration of a haptic device with a holograph |
| US10306217B2 (en) * | 2015-04-17 | 2019-05-28 | Seiko Epson Corporation | Display device, control method for display device, and computer program |
| JP6550885B2 (ja) | 2015-04-21 | 2019-07-31 | セイコーエプソン株式会社 | 表示装置、表示装置の制御方法、及び、プログラム |
| EP3289434A1 (en) | 2015-04-30 | 2018-03-07 | Google LLC | Wide-field radar-based gesture recognition |
| CN107466389B (zh) | 2015-04-30 | 2021-02-12 | 谷歌有限责任公司 | 用于确定类型不可知的rf信号表示的方法和装置 |
| CN111522434A (zh) | 2015-04-30 | 2020-08-11 | 谷歌有限责任公司 | 用于手势跟踪和识别的基于rf的微运动跟踪 |
| WO2016183498A1 (en) | 2015-05-13 | 2016-11-17 | Apple Inc. | Low-travel key mechanism for an input device |
| JP6637070B2 (ja) | 2015-05-13 | 2020-01-29 | アップル インコーポレイテッドApple Inc. | 電子デバイス用のキーボード |
| US9997304B2 (en) | 2015-05-13 | 2018-06-12 | Apple Inc. | Uniform illumination of keys |
| EP3295466B1 (en) | 2015-05-13 | 2023-11-29 | Apple Inc. | Keyboard assemblies having reduced thicknesses and method of forming keyboard assemblies |
| CN112882233B (zh) | 2015-05-19 | 2023-08-01 | 奇跃公司 | 双复合光场装置 |
| US10088908B1 (en) | 2015-05-27 | 2018-10-02 | Google Llc | Gesture detection and interactions |
| US9693592B2 (en) | 2015-05-27 | 2017-07-04 | Google Inc. | Attaching electronic components to interactive textiles |
| US9934915B2 (en) | 2015-06-10 | 2018-04-03 | Apple Inc. | Reduced layer keyboard stack-up |
| US20160371884A1 (en) * | 2015-06-17 | 2016-12-22 | Microsoft Technology Licensing, Llc | Complementary augmented reality |
| US10363632B2 (en) | 2015-06-24 | 2019-07-30 | Illinois Tool Works Inc. | Time of flight camera for welding machine vision |
| JP2017010387A (ja) * | 2015-06-24 | 2017-01-12 | キヤノン株式会社 | システム、複合現実表示装置、情報処理方法及びプログラム |
| US10708571B2 (en) | 2015-06-29 | 2020-07-07 | Microsoft Technology Licensing, Llc | Video frame processing |
| US9887537B2 (en) | 2015-06-30 | 2018-02-06 | Microsoft Technology Licensing, Llc | Analog limit on digitally set pulse widths |
| US10139966B2 (en) | 2015-07-22 | 2018-11-27 | Osterhout Group, Inc. | External user interface for head worn computing |
| US11003246B2 (en) * | 2015-07-22 | 2021-05-11 | Mentor Acquisition One, Llc | External user interface for head worn computing |
| CN108352393B (zh) | 2015-07-23 | 2022-09-16 | 光程研创股份有限公司 | 高效宽光谱传感器 |
| US10861888B2 (en) | 2015-08-04 | 2020-12-08 | Artilux, Inc. | Silicon germanium imager with photodiode in trench |
| EP3709362B1 (en) | 2015-08-04 | 2021-07-14 | Artilux Inc. | Germanium-silicon light sensing method |
| CN107533373B (zh) * | 2015-08-04 | 2020-09-08 | 谷歌有限责任公司 | 虚拟现实中经由手与对象的场境敏感碰撞的输入 |
| US10707260B2 (en) | 2015-08-04 | 2020-07-07 | Artilux, Inc. | Circuit for operating a multi-gate VIS/IR photodiode |
| US10761599B2 (en) | 2015-08-04 | 2020-09-01 | Artilux, Inc. | Eye gesture tracking |
| US10438505B2 (en) | 2015-08-12 | 2019-10-08 | Illinois Tool Works | Welding training system interface |
| US10657839B2 (en) | 2015-08-12 | 2020-05-19 | Illinois Tool Works Inc. | Stick welding electrode holders with real-time feedback features |
| US10373517B2 (en) | 2015-08-12 | 2019-08-06 | Illinois Tool Works Inc. | Simulation stick welding electrode holder systems and methods |
| US10593230B2 (en) | 2015-08-12 | 2020-03-17 | Illinois Tool Works Inc. | Stick welding electrode holder systems and methods |
| CN109407835B (zh) * | 2015-08-18 | 2023-01-13 | 奇跃公司 | 虚拟和增强现实系统和方法 |
| US9972215B2 (en) * | 2015-08-18 | 2018-05-15 | Lincoln Global, Inc. | Augmented reality interface for weld sequencing |
| CN115824395B (zh) | 2015-08-27 | 2023-08-15 | 光程研创股份有限公司 | 宽频谱光学传感器 |
| CN106484213B (zh) * | 2015-08-31 | 2019-11-01 | 深圳富泰宏精密工业有限公司 | 应用程序图标操作系统与方法 |
| CN105159539B (zh) * | 2015-09-10 | 2018-06-01 | 京东方科技集团股份有限公司 | 可穿戴设备的触控响应方法、装置及可穿戴设备 |
| US10209851B2 (en) * | 2015-09-18 | 2019-02-19 | Google Llc | Management of inactive windows |
| US10282623B1 (en) * | 2015-09-25 | 2019-05-07 | Apple Inc. | Depth perception sensor data processing |
| US9971084B2 (en) | 2015-09-28 | 2018-05-15 | Apple Inc. | Illumination structure for uniform illumination of keys |
| US10025375B2 (en) | 2015-10-01 | 2018-07-17 | Disney Enterprises, Inc. | Augmented reality controls for user interactions with a virtual world |
| US10368059B2 (en) * | 2015-10-02 | 2019-07-30 | Atheer, Inc. | Method and apparatus for individualized three dimensional display calibration |
| US10630965B2 (en) | 2015-10-02 | 2020-04-21 | Microsoft Technology Licensing, Llc | Calibrating a near-eye display |
| US10817065B1 (en) | 2015-10-06 | 2020-10-27 | Google Llc | Gesture recognition using multiple antenna |
| US10891106B2 (en) | 2015-10-13 | 2021-01-12 | Google Llc | Automatic batch voice commands |
| US11425866B2 (en) * | 2015-11-03 | 2022-08-30 | Keith Charles Burden | Automated pruning or harvesting system for complex morphology foliage |
| WO2017079484A1 (en) | 2015-11-04 | 2017-05-11 | Google Inc. | Connectors for connecting electronics embedded in garments to external devices |
| US10886309B2 (en) | 2015-11-06 | 2021-01-05 | Artilux, Inc. | High-speed light sensing apparatus II |
| US10739443B2 (en) | 2015-11-06 | 2020-08-11 | Artilux, Inc. | High-speed light sensing apparatus II |
| DE102015119065A1 (de) * | 2015-11-06 | 2017-05-11 | Spherie Ug | Flügelloses Fluggerät |
| US10254389B2 (en) | 2015-11-06 | 2019-04-09 | Artilux Corporation | High-speed light sensing apparatus |
| US10418407B2 (en) | 2015-11-06 | 2019-09-17 | Artilux, Inc. | High-speed light sensing apparatus III |
| US10741598B2 (en) | 2015-11-06 | 2020-08-11 | Atrilux, Inc. | High-speed light sensing apparatus II |
| US20170131775A1 (en) * | 2015-11-10 | 2017-05-11 | Castar, Inc. | System and method of haptic feedback by referral of sensation |
| CN105653022B (zh) * | 2015-11-13 | 2018-09-21 | 苏州市职业大学 | 基于rfid运动流形分析的人机交互投影装置及其算法 |
| US10768772B2 (en) * | 2015-11-19 | 2020-09-08 | Microsoft Technology Licensing, Llc | Context-aware recommendations of relevant presentation content displayed in mixed environments |
| US10043075B2 (en) * | 2015-11-19 | 2018-08-07 | Microsoft Technology Licensing, Llc | Eye feature identification |
| CN105487660A (zh) * | 2015-11-25 | 2016-04-13 | 北京理工大学 | 基于虚拟现实技术的沉浸式舞台表演交互方法及系统 |
| CN105320820A (zh) * | 2015-12-02 | 2016-02-10 | 上海航空电器有限公司 | 基于沉浸式虚拟现实平台的快速座舱设计系统及方法 |
| US10289206B2 (en) * | 2015-12-18 | 2019-05-14 | Intel Corporation | Free-form drawing and health applications |
| JP2017111724A (ja) * | 2015-12-18 | 2017-06-22 | 株式会社ブリリアントサービス | 配管用ヘッドマウントディスプレイ |
| CN105652442A (zh) * | 2015-12-31 | 2016-06-08 | 北京小鸟看看科技有限公司 | 头戴显示设备及该头戴显示设备与智能终端的交互方法 |
| WO2017120552A1 (en) | 2016-01-06 | 2017-07-13 | Meta Company | Apparatuses, methods and systems for pre-warping images for a display system with a distorting optical component |
| US9952429B2 (en) * | 2016-01-07 | 2018-04-24 | International Business Machines Corporation | Plurality of wearable devices sharing partially obstructing view at different angles to overcome visual obstructions |
| WO2017122299A1 (ja) * | 2016-01-13 | 2017-07-20 | フォーブ インコーポレーテッド | 表情認識システム、表情認識方法及び表情認識プログラム |
| US10438609B2 (en) * | 2016-01-14 | 2019-10-08 | George Brandon Foshee | System and device for audio translation to tactile response |
| US10114465B2 (en) * | 2016-01-15 | 2018-10-30 | Google Llc | Virtual reality head-mounted devices having reduced numbers of cameras, and methods of operating the same |
| CA3011637A1 (en) * | 2016-01-19 | 2017-07-27 | Magic Leap, Inc. | Eye image collection, selection, and combination |
| JP6873599B2 (ja) * | 2016-01-20 | 2021-05-19 | キヤノン株式会社 | 画像表示装置、画像表示システム及び画像表示方法 |
| DE102016200956A1 (de) * | 2016-01-25 | 2017-07-27 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Visualisieren einer Software |
| WO2017142977A1 (en) | 2016-02-15 | 2017-08-24 | Meta Company | Apparatuses, methods and systems for tethering 3-d virtual elements to digital content |
| US10591728B2 (en) | 2016-03-02 | 2020-03-17 | Mentor Acquisition One, Llc | Optical systems for head-worn computers |
| US10850116B2 (en) | 2016-12-30 | 2020-12-01 | Mentor Acquisition One, Llc | Head-worn therapy device |
| WO2017145154A1 (en) | 2016-02-22 | 2017-08-31 | Real View Imaging Ltd. | Wide field of view hybrid holographic display |
| US11663937B2 (en) | 2016-02-22 | 2023-05-30 | Real View Imaging Ltd. | Pupil tracking in an image display system |
| WO2017145158A1 (en) | 2016-02-22 | 2017-08-31 | Real View Imaging Ltd. | Zero order blocking and diverging for holographic imaging |
| US10788791B2 (en) | 2016-02-22 | 2020-09-29 | Real View Imaging Ltd. | Method and system for displaying holographic images within a real object |
| US10667981B2 (en) | 2016-02-29 | 2020-06-02 | Mentor Acquisition One, Llc | Reading assistance system for visually impaired |
| US9826299B1 (en) | 2016-08-22 | 2017-11-21 | Osterhout Group, Inc. | Speaker systems for head-worn computer systems |
| US9880441B1 (en) | 2016-09-08 | 2018-01-30 | Osterhout Group, Inc. | Electrochromic systems for head-worn computer systems |
| US9773324B1 (en) | 2016-03-23 | 2017-09-26 | Disney Enterprises, Inc. | Systems and methods for identifying targets on a display |
| US10665019B2 (en) * | 2016-03-24 | 2020-05-26 | Qualcomm Incorporated | Spatial relationships for integration of visual images of physical environment into virtual reality |
| US10373381B2 (en) * | 2016-03-30 | 2019-08-06 | Microsoft Technology Licensing, Llc | Virtual object manipulation within physical environment |
| JP2017182495A (ja) * | 2016-03-30 | 2017-10-05 | ソニー株式会社 | 情報処理装置、情報処理方法及びプログラム |
| CN105912101B (zh) * | 2016-03-31 | 2020-08-25 | 联想(北京)有限公司 | 一种投影控制方法和电子设备 |
| US10118696B1 (en) | 2016-03-31 | 2018-11-06 | Steven M. Hoffberg | Steerable rotating projectile |
| CN105709369A (zh) * | 2016-04-06 | 2016-06-29 | 上海捍康健康管理有限公司 | 一种多功能智能跑步机 |
| US10466491B2 (en) | 2016-06-01 | 2019-11-05 | Mentor Acquisition One, Llc | Modular systems for head-worn computers |
| US10380800B2 (en) * | 2016-04-18 | 2019-08-13 | Disney Enterprises, Inc. | System and method for linking and interacting between augmented reality and virtual reality environments |
| US10210661B2 (en) * | 2016-04-25 | 2019-02-19 | Microsoft Technology Licensing, Llc | Location-based holographic experience |
| CN105929958B (zh) * | 2016-04-26 | 2019-03-01 | 华为技术有限公司 | 一种手势识别方法,装置和头戴式可视设备 |
| CN105955614A (zh) * | 2016-04-29 | 2016-09-21 | 四川数字工匠科技有限公司 | 虚拟漫游操作系统 |
| WO2017192167A1 (en) | 2016-05-03 | 2017-11-09 | Google Llc | Connecting an electronic component to an interactive textile |
| GB2550124B (en) * | 2016-05-06 | 2021-11-17 | Nctech Ltd | Camera |
| US10248201B2 (en) * | 2016-05-06 | 2019-04-02 | The Board Of Trustees Of The Leland Stanford Junior University | Wolverine: a wearable haptic interface for grasping in virtual reality |
| CN107346906B (zh) * | 2016-05-06 | 2020-03-13 | 宏碁股份有限公司 | 无线系统、主动笔以及切换模式的方法 |
| WO2017200570A1 (en) | 2016-05-16 | 2017-11-23 | Google Llc | Interactive object with multiple electronics modules |
| US10285456B2 (en) | 2016-05-16 | 2019-05-14 | Google Llc | Interactive fabric |
| AU2017267983B2 (en) * | 2016-05-20 | 2022-03-31 | Magic Leap, Inc. | Method and system for performing convolutional image transformation estimation |
| US9971960B2 (en) * | 2016-05-26 | 2018-05-15 | Xesto Inc. | Method and system for providing gesture recognition services to user applications |
| WO2017210228A1 (en) | 2016-05-28 | 2017-12-07 | Acoustic Knowledge, LLC | Digital camera with audio, visual and motion analysis |
| CN106123916B (zh) * | 2016-06-13 | 2019-11-15 | 上海临奇智能科技有限公司 | 一种用于校准vr设备中惯性测量单元的方法与设备 |
| JP6088094B1 (ja) * | 2016-06-20 | 2017-03-01 | 株式会社Cygames | 複合現実環境を作成するためのシステム等 |
| CN106095108B (zh) * | 2016-06-22 | 2019-02-05 | 华为技术有限公司 | 一种增强现实反馈方法及设备 |
| KR102529119B1 (ko) * | 2016-06-27 | 2023-05-04 | 삼성전자주식회사 | 객체의 깊이 정보를 획득하는 방법, 디바이스 및 기록매체 |
| US11146661B2 (en) | 2016-06-28 | 2021-10-12 | Rec Room Inc. | Systems and methods for detecting collaborative virtual gestures |
| US10591988B2 (en) * | 2016-06-28 | 2020-03-17 | Hiscene Information Technology Co., Ltd | Method for displaying user interface of head-mounted display device |
| US10096165B2 (en) * | 2016-06-30 | 2018-10-09 | Intel Corporation | Technologies for virtual camera scene generation using physical object sensing |
| US10042604B2 (en) * | 2016-07-01 | 2018-08-07 | Metrik LLC | Multi-dimensional reference element for mixed reality environments |
| KR102402368B1 (ko) * | 2016-07-13 | 2022-05-25 | 네이키드 랩스 오스트리아 게엠베하 | 3d 바디 스캐너 및 바이탈 파라미터 센서들을 포함하는 스마트 바디 애널라이저 |
| KR102609330B1 (ko) | 2016-07-15 | 2023-12-05 | 라이트 필드 랩 인코포레이티드 | 라이트 필드 및 홀로그램 도파관 어레이에서의 에너지의 선택적 전파 |
| CN109478769A (zh) * | 2016-07-26 | 2019-03-15 | 三菱电机株式会社 | 缆线可动区域显示装置、缆线可动区域显示方法和缆线可动区域显示程序 |
| US10353485B1 (en) | 2016-07-27 | 2019-07-16 | Apple Inc. | Multifunction input device with an embedded capacitive sensing layer |
| CN106249894A (zh) * | 2016-08-08 | 2016-12-21 | 南方科技大学 | 虚拟现实交互系统和方法 |
| US10115544B2 (en) | 2016-08-08 | 2018-10-30 | Apple Inc. | Singulated keyboard assemblies and methods for assembling a keyboard |
| CN106201222A (zh) * | 2016-08-09 | 2016-12-07 | 深圳市金立通信设备有限公司 | 一种虚拟现实界面的显示方法及终端 |
| WO2018034053A1 (ja) * | 2016-08-18 | 2018-02-22 | ソニー株式会社 | 情報処理装置、情報処理システム及び情報処理方法 |
| CN106205456B (zh) * | 2016-08-19 | 2020-03-06 | 惠州Tcl移动通信有限公司 | 一种减少vr显示时左右眼图像延迟的驱动装置及其方法 |
| US10755877B1 (en) | 2016-08-29 | 2020-08-25 | Apple Inc. | Keyboard for an electronic device |
| US11500538B2 (en) | 2016-09-13 | 2022-11-15 | Apple Inc. | Keyless keyboard with force sensing and haptic feedback |
| US20180075657A1 (en) * | 2016-09-15 | 2018-03-15 | Microsoft Technology Licensing, Llc | Attribute modification tools for mixed reality |
| CN107835288A (zh) * | 2016-09-16 | 2018-03-23 | 天津思博科科技发展有限公司 | 应用智能终端实现的互动娱乐装置 |
| US10430042B2 (en) * | 2016-09-30 | 2019-10-01 | Sony Interactive Entertainment Inc. | Interaction context-based virtual reality |
| US10514769B2 (en) * | 2016-10-16 | 2019-12-24 | Dell Products, L.P. | Volumetric tracking for orthogonal displays in an electronic collaboration setting |
| TWI584156B (zh) * | 2016-10-25 | 2017-05-21 | 華碩電腦股份有限公司 | 操作系統、操作方法以及指示裝置 |
| US20180126268A1 (en) * | 2016-11-09 | 2018-05-10 | Zynga Inc. | Interactions between one or more mobile devices and a vr/ar headset |
| US10775880B2 (en) * | 2016-11-30 | 2020-09-15 | Universal City Studios Llc | Animated character head systems and methods |
| US10579150B2 (en) | 2016-12-05 | 2020-03-03 | Google Llc | Concurrent detection of absolute distance and relative movement for sensing action gestures |
| US10055028B2 (en) * | 2016-12-05 | 2018-08-21 | Google Llc | End of session detection in an augmented and/or virtual reality environment |
| KR102531542B1 (ko) | 2016-12-05 | 2023-05-10 | 매직 립, 인코포레이티드 | 혼합 현실 환경의 가상 사용자 입력 콘트롤들 |
| CN106582012B (zh) * | 2016-12-07 | 2018-12-11 | 腾讯科技(深圳)有限公司 | 一种vr场景下的攀爬操作处理方法和装置 |
| US10318130B2 (en) * | 2016-12-12 | 2019-06-11 | Google Llc | Controlling window using touch-sensitive edge |
| EP3559785B1 (en) | 2016-12-21 | 2021-02-03 | PCMS Holdings, Inc. | Systems and methods for selecting spheres of relevance for presenting augmented reality information |
| JP6171079B1 (ja) * | 2016-12-22 | 2017-07-26 | 株式会社Cygames | 不整合検出システム、複合現実システム、プログラム及び不整合検出方法 |
| US10088911B2 (en) | 2016-12-30 | 2018-10-02 | Manuel Saez | Programmable electronic helmet |
| US20180189014A1 (en) * | 2017-01-05 | 2018-07-05 | Honeywell International Inc. | Adaptive polyhedral display device |
| CN106839995B (zh) * | 2017-01-22 | 2019-11-05 | 南京景曜智能科技有限公司 | 一种物品三维尺寸检测装置及检测方法 |
| WO2018152109A1 (en) | 2017-02-20 | 2018-08-23 | Pcms Holdings, Inc. | Dynamically presenting augmented reality information for reducing peak cognitive demand |
| US10627910B2 (en) * | 2017-02-21 | 2020-04-21 | Adobe Inc. | Stroke operation prediction for three-dimensional digital content |
| WO2018155365A1 (ja) * | 2017-02-24 | 2018-08-30 | パナソニックIpマネジメント株式会社 | 外部ロック装置 |
| US10769861B2 (en) * | 2017-03-02 | 2020-09-08 | Axonom Inc. | Dynamic connection routing in virtual product configurations |
| US10567733B2 (en) | 2017-03-06 | 2020-02-18 | Nextvr Inc. | Methods and apparatus for communicating and/or using frames including a captured image and/or including additional image content |
| WO2018165223A1 (en) * | 2017-03-06 | 2018-09-13 | Nextvr Inc. | Methods and apparatus for packing images into a frame and/or including additional content or graphics |
| WO2018165038A1 (en) | 2017-03-06 | 2018-09-13 | Miso Robotics, Inc. | Augmented reality-enhanced food preparation system and related methods |
| US11252391B2 (en) | 2017-03-06 | 2022-02-15 | Nevermind Capital Llc | Methods and apparatus for packing images into a frame and/or including additional content or graphics |
| US11351673B2 (en) | 2017-03-06 | 2022-06-07 | Miso Robotics, Inc. | Robotic sled-enhanced food preparation system and related methods |
| CN106940477A (zh) * | 2017-03-14 | 2017-07-11 | 联想(北京)有限公司 | 一种控制方法及电子设备 |
| AU2018243565B2 (en) | 2017-03-30 | 2023-03-16 | Magic Leap, Inc. | Non-blocking dual driver earphones |
| US10977858B2 (en) | 2017-03-30 | 2021-04-13 | Magic Leap, Inc. | Centralized rendering |
| US20180288392A1 (en) * | 2017-04-01 | 2018-10-04 | Intel Corporation | Adjusting display content based on user distance detection |
| US10657682B2 (en) | 2017-04-12 | 2020-05-19 | Adobe Inc. | Drawing curves in space guided by 3-D objects |
| JP7211966B2 (ja) | 2017-04-14 | 2023-01-24 | マジック リープ, インコーポレイテッド | マルチモーダル眼追跡 |
| US10481755B1 (en) * | 2017-04-28 | 2019-11-19 | Meta View, Inc. | Systems and methods to present virtual content in an interactive space |
| CA3060209A1 (en) | 2017-05-01 | 2018-11-08 | Magic Leap, Inc. | Matching content to a spatial 3d environment |
| US10705598B2 (en) * | 2017-05-09 | 2020-07-07 | Microsoft Technology Licensing, Llc | Tracking wearable device and handheld object poses |
| US11079522B1 (en) | 2017-05-31 | 2021-08-03 | Magic Leap, Inc. | Fiducial design |
| US10542300B2 (en) * | 2017-05-31 | 2020-01-21 | Verizon Patent And Licensing Inc. | Methods and systems for customizing virtual reality data |
| CN111052187B (zh) | 2017-06-20 | 2024-01-30 | 惠普发展公司,有限责任合伙企业 | 传感器位置确定 |
| CA3066228A1 (en) * | 2017-06-28 | 2019-01-03 | Magic Leap, Inc. | Method and system for performing simultaneous localization and mapping using convolutional image transformation |
| CN107330198B (zh) * | 2017-07-03 | 2020-09-08 | 云南交通职业技术学院 | 深度知觉测试方法及系统 |
| US11409105B2 (en) | 2017-07-24 | 2022-08-09 | Mentor Acquisition One, Llc | See-through computer display systems |
| US10422995B2 (en) | 2017-07-24 | 2019-09-24 | Mentor Acquisition One, Llc | See-through computer display systems with stray light management |
| US10578869B2 (en) | 2017-07-24 | 2020-03-03 | Mentor Acquisition One, Llc | See-through computer display systems with adjustable zoom cameras |
| CN117270637A (zh) | 2017-07-26 | 2023-12-22 | 苹果公司 | 具有键盘的计算机 |
| US10922583B2 (en) * | 2017-07-26 | 2021-02-16 | Magic Leap, Inc. | Training a neural network with representations of user interface devices |
| US10969584B2 (en) | 2017-08-04 | 2021-04-06 | Mentor Acquisition One, Llc | Image expansion optic for head-worn computer |
| US10782793B2 (en) | 2017-08-10 | 2020-09-22 | Google Llc | Context-sensitive hand interaction |
| US10362296B2 (en) * | 2017-08-17 | 2019-07-23 | Microsoft Technology Licensing, Llc | Localized depth map generation |
| US11249714B2 (en) | 2017-09-13 | 2022-02-15 | Magical Technologies, Llc | Systems and methods of shareable virtual objects and virtual objects as message objects to facilitate communications sessions in an augmented reality environment |
| US11861136B1 (en) * | 2017-09-29 | 2024-01-02 | Apple Inc. | Systems, methods, and graphical user interfaces for interacting with virtual reality environments |
| CN111448568B (zh) * | 2017-09-29 | 2023-11-14 | 苹果公司 | 基于环境的应用演示 |
| KR102633727B1 (ko) | 2017-10-17 | 2024-02-05 | 매직 립, 인코포레이티드 | 혼합 현실 공간 오디오 |
| WO2019079826A1 (en) | 2017-10-22 | 2019-04-25 | Magical Technologies, Llc | DIGITAL ASSISTANT SYSTEMS, METHODS AND APPARATUSES IN AN INCREASED REALITY ENVIRONMENT AND LOCAL DETERMINATION OF VIRTUAL OBJECT PLACEMENT AND SINGLE OR MULTIDIRECTIONAL OBJECTIVES AS GATEWAYS BETWEEN A PHYSICAL WORLD AND A DIGITAL WORLD COMPONENT OF THE SAME ENVIRONMENT OF INCREASED REALITY |
| CN109725418B (zh) * | 2017-10-30 | 2020-10-16 | 华为技术有限公司 | 显示设备、用于调整显示设备的图像呈现的方法及装置 |
| WO2019093156A1 (ja) * | 2017-11-10 | 2019-05-16 | ソニーセミコンダクタソリューションズ株式会社 | 表示処理装置および表示処理方法、並びにプログラム |
| US11346914B2 (en) * | 2017-11-15 | 2022-05-31 | Fortiss, Llc. | RFID antenna array for gaming |
| US10782382B2 (en) * | 2017-11-15 | 2020-09-22 | Fortiss, Llc. | RFID antenna array for gaming |
| CN107657841A (zh) * | 2017-11-16 | 2018-02-02 | 岭南师范学院 | 一种基于全息投影的cad教学装置及系统 |
| US10424086B2 (en) * | 2017-11-16 | 2019-09-24 | Adobe Inc. | Oil painting stroke simulation using neural network |
| CN107967054B (zh) * | 2017-11-16 | 2020-11-27 | 中国人民解放军陆军装甲兵学院 | 一种虚拟现实与增强现实耦合的沉浸式三维电子沙盘 |
| US10016137B1 (en) | 2017-11-22 | 2018-07-10 | Hi Llc | System and method for simultaneously detecting phase modulated optical signals |
| USD879831S1 (en) * | 2017-11-22 | 2020-03-31 | Lg Electronics Inc. | Display screen with graphical user interface |
| US10420469B2 (en) | 2017-11-22 | 2019-09-24 | Hi Llc | Optical detection system for determining neural activity in brain based on water concentration |
| CN108052202B (zh) * | 2017-12-11 | 2021-06-11 | 深圳市星野信息技术有限公司 | 一种3d交互方法、装置、计算机设备及存储介质 |
| US10477355B1 (en) | 2017-12-13 | 2019-11-12 | Amazon Technologies, Inc. | System for locating users |
| CN111684495A (zh) * | 2017-12-22 | 2020-09-18 | 奇跃公司 | 用于在混合现实系统中管理和显示虚拟内容的方法和系统 |
| CN108053444B (zh) * | 2018-01-02 | 2021-03-12 | 京东方科技集团股份有限公司 | 瞳孔定位方法及装置、设备和存储介质 |
| CN108073285B (zh) * | 2018-01-02 | 2021-05-18 | 联想(北京)有限公司 | 一种电子设备及控制方法 |
| US10739861B2 (en) * | 2018-01-10 | 2020-08-11 | Facebook Technologies, Llc | Long distance interaction with artificial reality objects using a near eye display interface |
| US20190212828A1 (en) * | 2018-01-10 | 2019-07-11 | Facebook Technologies, Llc | Object enhancement in artificial reality via a near eye display interface |
| US11398088B2 (en) | 2018-01-30 | 2022-07-26 | Magical Technologies, Llc | Systems, methods and apparatuses to generate a fingerprint of a physical location for placement of virtual objects |
| CN108446585B (zh) * | 2018-01-31 | 2020-10-30 | 深圳市阿西莫夫科技有限公司 | 目标跟踪方法、装置、计算机设备和存储介质 |
| USD888752S1 (en) * | 2018-02-09 | 2020-06-30 | Lg Electronics Inc. | Display screen with graphical user interface |
| USD888750S1 (en) * | 2018-02-09 | 2020-06-30 | Lg Electronics Inc. | Display screen with graphical user interface |
| USD888751S1 (en) * | 2018-02-09 | 2020-06-30 | Lg Electronics Inc. | Display screen with graphical user interface |
| USD889500S1 (en) * | 2018-02-09 | 2020-07-07 | Lg Electronics Inc. | Display screen with graphical user interface |
| WO2019161312A1 (en) | 2018-02-15 | 2019-08-22 | Magic Leap, Inc. | Mixed reality musical instrument |
| CN111713091A (zh) | 2018-02-15 | 2020-09-25 | 奇跃公司 | 混合现实虚拟混响 |
| IL307545A (en) | 2018-02-15 | 2023-12-01 | Magic Leap Inc | Dual listening positions for mixed reality |
| US10735649B2 (en) | 2018-02-22 | 2020-08-04 | Magic Leap, Inc. | Virtual and augmented reality systems and methods using display system control information embedded in image data |
| IL301281A (en) | 2018-02-22 | 2023-05-01 | Magic Leap Inc | Shoot an object with physical manipulation |
| IL301443A (en) | 2018-02-22 | 2023-05-01 | Magic Leap Inc | A browser for mixed reality systems |
| US11105928B2 (en) | 2018-02-23 | 2021-08-31 | Artilux, Inc. | Light-sensing apparatus and light-sensing method thereof |
| JP6975341B2 (ja) | 2018-02-23 | 2021-12-01 | アーティラックス・インコーポレイテッド | 光検出装置およびその光検出方法 |
| US10368752B1 (en) | 2018-03-08 | 2019-08-06 | Hi Llc | Devices and methods to convert conventional imagers into lock-in cameras |
| US11712637B1 (en) | 2018-03-23 | 2023-08-01 | Steven M. Hoffberg | Steerable disk or ball |
| JP7212062B2 (ja) | 2018-04-08 | 2023-01-24 | アーティラックス・インコーポレイテッド | 光検出装置 |
| CN108776606A (zh) * | 2018-04-08 | 2018-11-09 | 中兴通讯股份有限公司 | 一种终端控制方法和装置、及终端 |
| US11206985B2 (en) | 2018-04-13 | 2021-12-28 | Hi Llc | Non-invasive optical detection systems and methods in highly scattering medium |
| CN108563359B (zh) * | 2018-04-17 | 2021-05-25 | 中芯集成电路(宁波)有限公司 | 相控阵触控模组及触控设备 |
| WO2019203952A1 (en) * | 2018-04-17 | 2019-10-24 | Pearson Education, Inc. | Systems and methods for applications of augmented reality |
| CN108563334B (zh) * | 2018-04-23 | 2021-09-03 | 京东方科技集团股份有限公司 | 一种虚拟现实头戴式显示设备、系统及其定位定姿方法 |
| US11857316B2 (en) | 2018-05-07 | 2024-01-02 | Hi Llc | Non-invasive optical detection system and method |
| US10854770B2 (en) | 2018-05-07 | 2020-12-01 | Artilux, Inc. | Avalanche photo-transistor |
| US10969877B2 (en) | 2018-05-08 | 2021-04-06 | Artilux, Inc. | Display apparatus |
| CN108664124B (zh) * | 2018-05-08 | 2021-08-24 | 北京奇艺世纪科技有限公司 | 一种基于空间方位信息的控制方法及装置 |
| US10706584B1 (en) * | 2018-05-18 | 2020-07-07 | Facebook Technologies, Llc | Hand tracking using a passive camera system |
| US10497161B1 (en) | 2018-06-08 | 2019-12-03 | Curious Company, LLC | Information display by overlay on an object |
| US10667072B2 (en) | 2018-06-12 | 2020-05-26 | Magic Leap, Inc. | Efficient rendering of virtual soundfields |
| EP3807872B1 (en) | 2018-06-14 | 2024-04-10 | Magic Leap, Inc. | Reverberation gain normalization |
| WO2019241760A1 (en) | 2018-06-14 | 2019-12-19 | Magic Leap, Inc. | Methods and systems for audio signal filtering |
| WO2019246159A1 (en) | 2018-06-18 | 2019-12-26 | Magic Leap, Inc. | Spatial audio for interactive audio environments |
| US11854566B2 (en) | 2018-06-21 | 2023-12-26 | Magic Leap, Inc. | Wearable system speech processing |
| US11087538B2 (en) | 2018-06-26 | 2021-08-10 | Lenovo (Singapore) Pte. Ltd. | Presentation of augmented reality images at display locations that do not obstruct user's view |
| US10549186B2 (en) * | 2018-06-26 | 2020-02-04 | Sony Interactive Entertainment Inc. | Multipoint SLAM capture |
| US11077365B2 (en) | 2018-06-27 | 2021-08-03 | Niantic, Inc. | Low latency datagram-responsive computer network protocol |
| CN110658518B (zh) * | 2018-06-29 | 2022-01-21 | 杭州海康威视数字技术股份有限公司 | 一种目标入侵检测方法及装置 |
| US11201953B2 (en) | 2018-07-24 | 2021-12-14 | Magic Leap, Inc. | Application sharing |
| KR20210034585A (ko) | 2018-07-25 | 2021-03-30 | 라이트 필드 랩 인코포레이티드 | 라이트필드 디스플레이 시스템 기반 놀이 공원 기구 |
| KR102169024B1 (ko) * | 2018-08-01 | 2020-10-22 | 주식회사 포멀웍스 | 3차원 증강현실을 이용한 합동 지휘통제 훈련 시스템 및 제공방법 |
| CN110827411B (zh) * | 2018-08-09 | 2023-07-18 | 北京微播视界科技有限公司 | 自适应环境的增强现实模型显示方法、装置、设备及存储介质 |
| US11192258B2 (en) | 2018-08-10 | 2021-12-07 | Miso Robotics, Inc. | Robotic kitchen assistant for frying including agitator assembly for shaking utensil |
| US11393170B2 (en) * | 2018-08-21 | 2022-07-19 | Lenovo (Singapore) Pte. Ltd. | Presentation of content based on attention center of user |
| US10818023B2 (en) * | 2018-08-24 | 2020-10-27 | Wisconsin Alumni Research Foundation | Systems, methods, and media for encoding structured light imaging patterns and estimating depths in a scene |
| CN109272563B (zh) * | 2018-08-28 | 2022-12-27 | 广州图语信息科技有限公司 | 基于确定性规则的结构光构建方法、装置及处理终端 |
| US10991139B2 (en) | 2018-08-30 | 2021-04-27 | Lenovo (Singapore) Pte. Ltd. | Presentation of graphical object(s) on display to avoid overlay on another item |
| US10902678B2 (en) | 2018-09-06 | 2021-01-26 | Curious Company, LLC | Display of hidden information |
| KR102155378B1 (ko) * | 2018-09-19 | 2020-09-14 | 주식회사 브이터치 | 객체 제어를 지원하기 위한 방법, 시스템 및 비일시성의 컴퓨터 판독 가능 기록 매체 |
| CN113168007B (zh) | 2018-09-25 | 2023-09-15 | 奇跃公司 | 用于增强现实的系统和方法 |
| US10970922B2 (en) * | 2018-09-28 | 2021-04-06 | Apple Inc. | Generating a 3D model of a fingertip for visual touch detection |
| CN116320907A (zh) | 2018-10-05 | 2023-06-23 | 奇跃公司 | 近场音频渲染 |
| US10887720B2 (en) | 2018-10-05 | 2021-01-05 | Magic Leap, Inc. | Emphasis for audio spatialization |
| CN113168526A (zh) | 2018-10-09 | 2021-07-23 | 奇跃公司 | 用于虚拟和增强现实的系统和方法 |
| JP2022505662A (ja) | 2018-10-24 | 2022-01-14 | マジック リープ, インコーポレイテッド | 非同期asic |
| US11577401B2 (en) | 2018-11-07 | 2023-02-14 | Miso Robotics, Inc. | Modular robotic food preparation system and related methods |
| CN109448050B (zh) * | 2018-11-21 | 2022-04-29 | 深圳市创梦天地科技有限公司 | 一种目标点的位置的确定方法及终端 |
| JP7148634B2 (ja) * | 2018-12-04 | 2022-10-05 | マクセル株式会社 | ヘッドマウントディスプレイ装置 |
| US11055913B2 (en) | 2018-12-04 | 2021-07-06 | Curious Company, LLC | Directional instructions in an hybrid reality system |
| KR102051889B1 (ko) * | 2018-12-05 | 2019-12-06 | 주식회사 증강지능 | 스마트 글래스에서 2d 데이터를 기반으로 3d 증강현실을 구현하는 방법 및 시스템 |
| SE542553C2 (en) * | 2018-12-17 | 2020-06-02 | Tobii Ab | Gaze tracking via tracing of light paths |
| US10877568B2 (en) * | 2018-12-19 | 2020-12-29 | Arizona Board Of Regents On Behalf Of Arizona State University | Three-dimensional in-the-air finger motion based user login framework for gesture interface |
| CA3121740A1 (en) * | 2018-12-19 | 2020-06-25 | Bae Systems Plc | Method and system for adjusting luminance profiles in head-mounted displays |
| KR102152217B1 (ko) * | 2018-12-20 | 2020-09-04 | 서강대학교 산학협력단 | Vr 장비와 ar 장비간의 좌표계 일치용 지그 및 이를 이용한 물리 공간 공유 방법 |
| US10970935B2 (en) | 2018-12-21 | 2021-04-06 | Curious Company, LLC | Body pose message system |
| US11221814B2 (en) | 2018-12-27 | 2022-01-11 | Magic Leap, Inc. | Systems and methods for virtual and augmented reality |
| US11200656B2 (en) | 2019-01-11 | 2021-12-14 | Universal City Studios Llc | Drop detection systems and methods |
| CA3031479A1 (en) * | 2019-01-25 | 2020-07-25 | Jonathan Gagne | Computer animation methods and systems |
| EP3917430B1 (en) * | 2019-01-31 | 2023-07-05 | Brainlab AG | Virtual trajectory planning |
| CN113412479A (zh) * | 2019-02-06 | 2021-09-17 | 麦克赛尔株式会社 | 混合现实显示装置和混合现实显示方法 |
| US11707806B2 (en) * | 2019-02-12 | 2023-07-25 | Illinois Tool Works Inc. | Virtual markings in welding systems |
| SE543332C2 (en) * | 2019-02-19 | 2020-12-01 | Tobii Ab | Method, computer program and head mountable arrangement for assisting a subject to acquire spatial information about an environment |
| US11450233B2 (en) | 2019-02-19 | 2022-09-20 | Illinois Tool Works Inc. | Systems for simulating joining operations using mobile devices |
| US11521512B2 (en) | 2019-02-19 | 2022-12-06 | Illinois Tool Works Inc. | Systems for simulating joining operations using mobile devices |
| KR102577903B1 (ko) | 2019-02-25 | 2023-09-14 | 나이앤틱, 인크. | 증강 현실 모바일 에지 컴퓨팅 |
| CN113748462A (zh) | 2019-03-01 | 2021-12-03 | 奇跃公司 | 确定用于语音处理引擎的输入 |
| US11467656B2 (en) * | 2019-03-04 | 2022-10-11 | Magical Technologies, Llc | Virtual object control of a physical device and/or physical device control of a virtual object |
| US10872584B2 (en) | 2019-03-14 | 2020-12-22 | Curious Company, LLC | Providing positional information using beacon devices |
| US11126885B2 (en) * | 2019-03-21 | 2021-09-21 | Infineon Technologies Ag | Character recognition in air-writing based on network of radars |
| US11221487B2 (en) | 2019-03-26 | 2022-01-11 | Kevin Chew Figueroa | Method and device of field sequential imaging for large field of view augmented/virtual reality |
| US10939080B2 (en) * | 2019-03-29 | 2021-03-02 | Facebook Technologies, Llc | Trajectory estimation for a MEMS reflector |
| JP7440532B2 (ja) | 2019-04-03 | 2024-02-28 | マジック リープ, インコーポレイテッド | 複合現実システムを用いて仮想3次元空間内のウェブページを管理および表示すること |
| EP3956876A1 (en) * | 2019-04-18 | 2022-02-23 | Yuliana Ivanova Murdjeva | Interactive system and method of use |
| CN110110647A (zh) * | 2019-04-30 | 2019-08-09 | 北京小米移动软件有限公司 | 基于ar设备进行信息显示的方法、装置及存储介质 |
| US10861243B1 (en) * | 2019-05-31 | 2020-12-08 | Apical Limited | Context-sensitive augmented reality |
| EP3980880A4 (en) | 2019-06-06 | 2022-11-23 | Magic Leap, Inc. | PHOTOREAL CHARACTER CONFIGURATIONS FOR SPACE COMPUTING |
| CN110245601B (zh) * | 2019-06-11 | 2022-03-01 | Oppo广东移动通信有限公司 | 眼球追踪方法及相关产品 |
| US20220230435A1 (en) * | 2019-06-21 | 2022-07-21 | Sony Interactive Entertainment Inc. | Imaging data generation apparatus, imaging data generation method, and program |
| US11030459B2 (en) * | 2019-06-27 | 2021-06-08 | Intel Corporation | Methods and apparatus for projecting augmented reality enhancements to real objects in response to user gestures detected in a real environment |
| CN110322552B (zh) * | 2019-07-09 | 2023-05-12 | 广州市云家居云科技有限公司 | 一种基于激光测距的即时生成三维房型的软件系统 |
| US11288978B2 (en) | 2019-07-22 | 2022-03-29 | Illinois Tool Works Inc. | Gas tungsten arc welding training systems |
| US11776423B2 (en) | 2019-07-22 | 2023-10-03 | Illinois Tool Works Inc. | Connection boxes for gas tungsten arc welding training systems |
| CN110427702B (zh) * | 2019-08-02 | 2023-04-25 | 深圳市元征科技股份有限公司 | 一种在pcb丝印层添加注释信息的方法、装置、设备 |
| US11328740B2 (en) | 2019-08-07 | 2022-05-10 | Magic Leap, Inc. | Voice onset detection |
| US11704874B2 (en) | 2019-08-07 | 2023-07-18 | Magic Leap, Inc. | Spatial instructions and guides in mixed reality |
| JP2022552770A (ja) | 2019-08-09 | 2022-12-20 | ライト フィールド ラボ、インコーポレイテッド | ライトフィールドディスプレイシステムに基づいたデジタルサイネージシステム発明者:ジョナサン・シャン・カラフィン、ブレンダン・エルウッド・ベベンシー、ジョン・ドーム |
| EP3782833B1 (en) * | 2019-08-21 | 2023-04-19 | Ningbo Geely Automobile Research & Development Co. Ltd. | Controlling an internal light source of a vehicle for darkening of glasses |
| US11132832B2 (en) * | 2019-08-29 | 2021-09-28 | Sony Interactive Entertainment Inc. | Augmented reality (AR) mat with light, touch sensing mat with infrared trackable surface |
| KR20220054619A (ko) * | 2019-09-03 | 2022-05-03 | 라이트 필드 랩 인코포레이티드 | 모바일 장치를 위한 라이트필드 디스플레이 |
| US11517196B2 (en) * | 2019-09-12 | 2022-12-06 | Yuan Ze University | Evaluation device for tear secretion |
| CN114830182A (zh) | 2019-10-18 | 2022-07-29 | 奇跃公司 | 视觉惯性里程计的重力估计和光束法平差 |
| US10997766B1 (en) * | 2019-11-06 | 2021-05-04 | XRSpace CO., LTD. | Avatar motion generating method and head mounted display system |
| WO2021081442A1 (en) | 2019-10-25 | 2021-04-29 | Magic Leap, Inc. | Non-uniform stereo rendering |
| JP7446420B2 (ja) | 2019-10-25 | 2024-03-08 | マジック リープ, インコーポレイテッド | 反響フィンガプリント推定 |
| US20210174275A1 (en) * | 2019-11-13 | 2021-06-10 | Erinn Valencich | System and method for the design industry that enables creative teams to design, collaborate and connect with clients and track and manage progress of each client project providing client status to all interested parties |
| US11959997B2 (en) | 2019-11-22 | 2024-04-16 | Magic Leap, Inc. | System and method for tracking a wearable device |
| US11322037B2 (en) | 2019-11-25 | 2022-05-03 | Illinois Tool Works Inc. | Weld training simulations using mobile devices, modular workpieces, and simulated welding equipment |
| US11721231B2 (en) | 2019-11-25 | 2023-08-08 | Illinois Tool Works Inc. | Weld training simulations using mobile devices, modular workpieces, and simulated welding equipment |
| JP2023512869A (ja) | 2019-12-03 | 2023-03-30 | ライト フィールド ラボ、インコーポレイテッド | ビデオゲームおよび電子スポーツのためのライトフィールドディスプレイシステム |
| WO2021113782A1 (en) | 2019-12-04 | 2021-06-10 | Magic Leap, Inc. | Variable-pitch color emitting display |
| EP4070284A4 (en) | 2019-12-06 | 2023-05-24 | Magic Leap, Inc. | ENVIRONMENTAL ACOUSTIC PERSISTENCE |
| US11269181B2 (en) | 2019-12-09 | 2022-03-08 | Magic Leap, Inc. | Systems and methods for operating a head-mounted display system based on user identity |
| US20210192681A1 (en) * | 2019-12-18 | 2021-06-24 | Ati Technologies Ulc | Frame reprojection for virtual reality and augmented reality |
| KR20220115618A (ko) | 2019-12-20 | 2022-08-17 | 나이앤틱, 인크. | 데이터 전송 경로 선택을 위한 데이터 계층 프로토콜 |
| US11337023B2 (en) | 2019-12-20 | 2022-05-17 | Magic Leap, Inc. | Physics-based audio and haptic synthesis |
| CN111192363B (zh) * | 2019-12-23 | 2023-09-29 | 杭州电力设备制造有限公司 | 一种基于云计算的用户配电房设计生成方法 |
| US11763559B2 (en) | 2020-02-14 | 2023-09-19 | Magic Leap, Inc. | 3D object annotation |
| WO2021163382A1 (en) | 2020-02-14 | 2021-08-19 | Magic Leap, Inc. | Multi-application audio rendering |
| US11778410B2 (en) | 2020-02-14 | 2023-10-03 | Magic Leap, Inc. | Delayed audio following |
| EP4104000A4 (en) | 2020-02-14 | 2023-07-12 | Magic Leap, Inc. | TOOL BRIDGE |
| JP2023514572A (ja) | 2020-02-14 | 2023-04-06 | マジック リープ, インコーポレイテッド | セッションマネージャ |
| WO2021178454A1 (en) | 2020-03-02 | 2021-09-10 | Magic Leap, Inc. | Immersive audio platform |
| CN111580642B (zh) * | 2020-03-20 | 2023-06-09 | 深圳市企鹅网络科技有限公司 | 视觉共享的互动教学方法、系统、设备及存储介质 |
| US11917384B2 (en) | 2020-03-27 | 2024-02-27 | Magic Leap, Inc. | Method of waking a device using spoken voice commands |
| CN111508008B (zh) * | 2020-04-08 | 2023-07-14 | 达闼机器人股份有限公司 | 一种点云配准的方法、电子设备和存储介质 |
| CN111523411B (zh) * | 2020-04-10 | 2023-02-28 | 陕西师范大学 | 基于语义修补的合成孔径成像方法 |
| US11431952B2 (en) * | 2020-05-11 | 2022-08-30 | Sony Interactive Entertainment Inc. | User selection of virtual camera location to produce video using synthesized input from multiple cameras |
| EP4158615A4 (en) | 2020-05-29 | 2023-11-15 | Magic Leap, Inc. | DETERMINATION OF ANGULAR ACCELERATION |
| WO2021243098A1 (en) | 2020-05-29 | 2021-12-02 | Magic Leap, Inc. | Surface appropriate collisions |
| US11900521B2 (en) | 2020-08-17 | 2024-02-13 | LiquidView Corp | Virtual window apparatus and system |
| US11817201B2 (en) | 2020-09-08 | 2023-11-14 | Medtronic, Inc. | Imaging discovery utility for augmenting clinical image management |
| WO2022060518A1 (en) * | 2020-09-15 | 2022-03-24 | Carnelian Laboratories Llc | Head-mountable device and connector |
| WO2022060555A1 (en) * | 2020-09-16 | 2022-03-24 | Sterling Labs Llc | Merging computer-generated objects based on extremity tracking data |
| US20230388690A1 (en) * | 2020-09-30 | 2023-11-30 | Magic Leap, lnc. | Dual mode ported speaker |
| DE102020126953B3 (de) * | 2020-10-14 | 2021-12-30 | Bayerische Motoren Werke Aktiengesellschaft | System und Verfahren zum Erfassen einer räumlichen Orientierung einer tragbaren Vorrichtung |
| US11397956B1 (en) | 2020-10-26 | 2022-07-26 | Wells Fargo Bank, N.A. | Two way screen mirroring using a smart table |
| US11572733B1 (en) | 2020-10-26 | 2023-02-07 | Wells Fargo Bank, N.A. | Smart table with built-in lockers |
| US11457730B1 (en) | 2020-10-26 | 2022-10-04 | Wells Fargo Bank, N.A. | Tactile input device for a touch screen |
| US11429957B1 (en) | 2020-10-26 | 2022-08-30 | Wells Fargo Bank, N.A. | Smart table assisted financial health |
| US11740853B1 (en) | 2020-10-26 | 2023-08-29 | Wells Fargo Bank, N.A. | Smart table system utilizing extended reality |
| US11741517B1 (en) | 2020-10-26 | 2023-08-29 | Wells Fargo Bank, N.A. | Smart table system for document management |
| US11727483B1 (en) | 2020-10-26 | 2023-08-15 | Wells Fargo Bank, N.A. | Smart table assisted financial health |
| CN112417398B (zh) * | 2020-11-17 | 2021-12-14 | 广州技象科技有限公司 | 一种基于用户权限的物联网展馆导航方法及装置 |
| CN112527112B (zh) * | 2020-12-08 | 2023-05-02 | 中国空气动力研究与发展中心计算空气动力研究所 | 一种多通道沉浸式流场可视化人机交互方法 |
| US11115512B1 (en) * | 2020-12-12 | 2021-09-07 | John G. Posa | Smartphone cases with integrated electronic binoculars |
| CN112686973A (zh) * | 2020-12-24 | 2021-04-20 | 京东方科技集团股份有限公司 | 图像编辑方法及控制装置、存储介质、计算机设备 |
| US11402634B2 (en) * | 2020-12-30 | 2022-08-02 | Facebook Technologies, Llc. | Hand-locked rendering of virtual objects in artificial reality |
| US11543931B2 (en) | 2021-01-27 | 2023-01-03 | Ford Global Technologies, Llc | Systems and methods for interacting with a tabletop model using a mobile device |
| DE102021106126A1 (de) * | 2021-03-12 | 2022-09-15 | Helmut Fischer GmbH Institut für Elektronik und Messtechnik | Verfahren und System zur taktilen Messung, insbesondere Schichtdickenmessung |
| US20220346598A1 (en) | 2021-05-01 | 2022-11-03 | Miso Robotics, Inc. | Automated bin system for accepting food items in robotic kitchen workspace |
| US11625094B2 (en) * | 2021-05-04 | 2023-04-11 | Google Llc | Eye tracker design for a wearable device |
| CN113395491A (zh) * | 2021-06-11 | 2021-09-14 | 上海海事大学 | 船舶机舱远程监测报警系统 |
| CN113726471B (zh) * | 2021-07-20 | 2024-01-12 | 西安交通大学 | 一种智能反射表面辅助型mimo隐蔽通信系统的参数优化方法 |
| CN113780136B (zh) * | 2021-08-31 | 2023-07-14 | 中国科学技术大学先进技术研究院 | 基于时空纹理识别的VOCs气体泄漏检测方法、系统及设备 |
| US11740322B2 (en) * | 2021-09-10 | 2023-08-29 | Htc Corporation | Head mounted display device and position device thereof |
| CN114363557B (zh) * | 2022-03-04 | 2022-06-24 | 西安电子科技大学 | 一种面向语义保真的虚拟会议方法及三维虚拟会议系统 |
| CN114676729B (zh) * | 2022-03-28 | 2023-02-07 | 清华大学 | 时分复用信号的分接方法、装置、设备及存储介质 |
| CN114578313B (zh) * | 2022-05-09 | 2022-07-22 | 中国电子科技集团公司信息科学研究院 | 基于质心查找的栅格检测镜像消除方法及装置 |
| CN114818519B (zh) * | 2022-06-30 | 2022-10-11 | 湖南工商大学 | 预测发泡材料气泡破裂的方法、系统及计算机可读介质 |
| US11877071B1 (en) | 2022-09-22 | 2024-01-16 | Apple Inc. | Flicker and proximity detection in image sensors with embedded low power readout circuitry |
| CN116258811B (zh) * | 2023-05-08 | 2023-07-25 | 北京德风新征程科技股份有限公司 | 信息发送方法、装置、电子设备和计算机可读介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050166163A1 (en) * | 2004-01-23 | 2005-07-28 | Chang Nelson L.A. | Systems and methods of interfacing with a machine |
| JP2006209664A (ja) * | 2005-01-31 | 2006-08-10 | Canon Inc | システム、画像処理装置、情報処理方法 |
| JP2008309631A (ja) * | 2007-06-14 | 2008-12-25 | Canon Inc | 情報処理方法及び情報処理装置 |
| CN101727182A (zh) * | 2010-01-28 | 2010-06-09 | 南京航空航天大学 | 头盔式虚拟现实环境中参与者实际手的可视化方法和系统 |
| JP2011227644A (ja) * | 2010-04-19 | 2011-11-10 | Sony Corp | 画像処理装置、画像処理方法及びプログラム |
| US20120105473A1 (en) * | 2010-10-27 | 2012-05-03 | Avi Bar-Zeev | Low-latency fusing of virtual and real content |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6909443B1 (en) * | 1999-04-06 | 2005-06-21 | Microsoft Corporation | Method and apparatus for providing a three-dimensional task gallery computer interface |
| US7406214B2 (en) * | 1999-05-19 | 2008-07-29 | Digimarc Corporation | Methods and devices employing optical sensors and/or steganography |
| US6753847B2 (en) | 2002-01-25 | 2004-06-22 | Silicon Graphics, Inc. | Three dimensional volumetric display input and output configurations |
| US7337410B2 (en) * | 2002-11-06 | 2008-02-26 | Julius Lin | Virtual workstation |
| US7308112B2 (en) | 2004-05-14 | 2007-12-11 | Honda Motor Co., Ltd. | Sign based human-machine interaction |
| US8279168B2 (en) | 2005-12-09 | 2012-10-02 | Edge 3 Technologies Llc | Three-dimensional virtual-touch human-machine interface system and method therefor |
| JP4765818B2 (ja) | 2006-08-02 | 2011-09-07 | 住友電装株式会社 | 電線カバー |
| US20100066662A1 (en) | 2006-10-02 | 2010-03-18 | Pioneer Corporation | Image display device |
| JP4926799B2 (ja) | 2006-10-23 | 2012-05-09 | キヤノン株式会社 | 情報処理装置、情報処理方法 |
| US9891435B2 (en) * | 2006-11-02 | 2018-02-13 | Sensics, Inc. | Apparatus, systems and methods for providing motion tracking using a personal viewing device |
| US20090040296A1 (en) | 2007-08-06 | 2009-02-12 | Moscato Jonathan D | Head mounted display assembly |
| AU2008299883B2 (en) | 2007-09-14 | 2012-03-15 | Facebook, Inc. | Processing of gesture-based user interactions |
| DE112009000094T5 (de) * | 2008-01-04 | 2010-11-11 | 3M Innovative Properties Co., St. Paul | Verfeinerung dreidimensionaler Modelle |
| US8933876B2 (en) | 2010-12-13 | 2015-01-13 | Apple Inc. | Three dimensional user interface session control |
| JP5684577B2 (ja) * | 2008-02-27 | 2015-03-11 | ソニー コンピュータ エンタテインメント アメリカ リミテッド ライアビリテイ カンパニー | シーンの深度データをキャプチャし、コンピュータのアクションを適用する方法 |
| US9740293B2 (en) | 2009-04-02 | 2017-08-22 | Oblong Industries, Inc. | Operating environment with gestural control and multiple client devices, displays, and users |
| DE102008002692B4 (de) | 2008-06-26 | 2019-02-21 | Seereal Technologies S.A. | Displayeinrichtung zur dreidimensionalen holographischen oder stereoskopischen Darstellung räumlicher Objekte und Verfahren zum Ermitteln einer Apodisationsfunktion für eine Apodisationsmaske |
| US8520872B2 (en) | 2008-08-14 | 2013-08-27 | Samsung Electronics Co., Ltd. | Apparatus and method for sound processing in a virtual reality system |
| US8289288B2 (en) | 2009-01-15 | 2012-10-16 | Microsoft Corporation | Virtual object adjustment via physical object detection |
| US10357714B2 (en) * | 2009-10-27 | 2019-07-23 | Harmonix Music Systems, Inc. | Gesture-based user interface for navigating a menu |
| JP4900741B2 (ja) * | 2010-01-29 | 2012-03-21 | 島根県 | 画像認識装置および操作判定方法並びにプログラム |
| US8730309B2 (en) | 2010-02-23 | 2014-05-20 | Microsoft Corporation | Projectors and depth cameras for deviceless augmented reality and interaction |
| KR101735610B1 (ko) * | 2010-05-06 | 2017-05-15 | 엘지전자 주식회사 | 영상표시장치의 동작 방법 |
| US9372701B2 (en) * | 2010-05-12 | 2016-06-21 | Sony Interactive Entertainment America Llc | Management of digital information via a buoyant interface moving in three-dimensional space |
| US9122307B2 (en) * | 2010-09-20 | 2015-09-01 | Kopin Corporation | Advanced remote control of host application using motion and voice commands |
| US20120113223A1 (en) * | 2010-11-05 | 2012-05-10 | Microsoft Corporation | User Interaction in Augmented Reality |
| US9189129B2 (en) * | 2011-02-01 | 2015-11-17 | 9224-5489 Quebec Inc. | Non-homogeneous objects magnification and reduction |
| JP5785753B2 (ja) | 2011-03-25 | 2015-09-30 | 京セラ株式会社 | 電子機器、制御方法および制御プログラム |
| EP2691935A1 (en) * | 2011-03-29 | 2014-02-05 | Qualcomm Incorporated | System for the rendering of shared digital interfaces relative to each user's point of view |
| US8879828B2 (en) | 2011-06-29 | 2014-11-04 | Matterport, Inc. | Capturing and aligning multiple 3-dimensional scenes |
| US10824310B2 (en) | 2012-12-20 | 2020-11-03 | Sri International | Augmented reality virtual personal assistant for external representation |
| US9092600B2 (en) | 2012-11-05 | 2015-07-28 | Microsoft Technology Licensing, Llc | User authentication on augmented reality display device |
| CA2896985A1 (en) | 2013-01-03 | 2014-07-10 | Meta Company | Extramissive spatial imaging digital eye glass for virtual or augmediated vision |
| CN105209952B (zh) | 2013-03-15 | 2018-08-24 | 依米有限公司 | 具有非瞳孔成形光路的头戴式显示器 |
| TW201447375A (zh) | 2013-06-13 | 2014-12-16 | Hsiu-Chi Yeh | 擴增實境之頭戴式電子裝置及方法 |
| KR102302233B1 (ko) * | 2014-05-26 | 2021-09-14 | 삼성전자주식회사 | 사용자 인터페이스 제공 장치 및 방법 |
| US10120413B2 (en) * | 2014-09-11 | 2018-11-06 | Interaxon Inc. | System and method for enhanced training using a virtual reality environment and bio-signal data |
| KR20160053462A (ko) * | 2014-11-04 | 2016-05-13 | 삼성전자주식회사 | 단말장치 및 그 제어 방법 |
| US10567641B1 (en) * | 2015-01-19 | 2020-02-18 | Devon Rueckner | Gaze-directed photography |
| CN105872729A (zh) * | 2015-04-21 | 2016-08-17 | 乐视致新电子科技(天津)有限公司 | 识别操作事件的方法和装置 |
| US20170193705A1 (en) * | 2015-12-31 | 2017-07-06 | Daqri, Llc | Path visualization for motion planning |
| US10832051B1 (en) * | 2016-06-13 | 2020-11-10 | Facebook Technologies, Llc | Eye tracking using optical coherence methods |
| JP6786762B2 (ja) * | 2016-08-05 | 2020-11-18 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 画像収集部及び距離測定部を有する装置を制御する方法、及び装置 |
| US10409363B1 (en) * | 2017-03-07 | 2019-09-10 | vGolf, LLC | Mixed-reality golf tracking and simulation |
| US10325414B2 (en) * | 2017-05-08 | 2019-06-18 | Microsoft Technology Licensing, Llc | Application of edge effects to 3D virtual objects |
-
2014
- 2014-01-03 CA CA2896985A patent/CA2896985A1/en not_active Abandoned
- 2014-01-03 WO PCT/IB2014/058042 patent/WO2014106823A2/en active Application Filing
- 2014-01-03 CN CN201480012295.2A patent/CN105027190B/zh active Active
- 2014-01-03 EP EP14735321.3A patent/EP2951811A4/en not_active Ceased
- 2014-01-03 KR KR1020157021052A patent/KR20150103723A/ko not_active Application Discontinuation
- 2014-01-03 AU AU2014204252A patent/AU2014204252B2/en not_active Ceased
- 2014-01-03 US US14/147,199 patent/US9720505B2/en active Active
- 2014-01-03 JP JP2015551242A patent/JP2016509292A/ja active Pending
-
2017
- 2017-07-19 US US15/653,719 patent/US10168791B2/en active Active
-
2018
- 2018-10-10 US US16/156,798 patent/US10540014B2/en active Active
-
2019
- 2019-05-14 JP JP2019091204A patent/JP2019149202A/ja active Pending
-
2020
- 2020-01-17 US US16/746,454 patent/US11073916B2/en active Active
-
2021
- 2021-07-26 US US17/385,571 patent/US11334171B2/en active Active
-
2022
- 2022-05-02 US US17/734,909 patent/US11550401B2/en active Active
-
2023
- 2023-01-09 US US18/151,811 patent/US11762478B2/en active Active
- 2023-08-03 US US18/230,053 patent/US20230376121A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050166163A1 (en) * | 2004-01-23 | 2005-07-28 | Chang Nelson L.A. | Systems and methods of interfacing with a machine |
| JP2006209664A (ja) * | 2005-01-31 | 2006-08-10 | Canon Inc | システム、画像処理装置、情報処理方法 |
| JP2008309631A (ja) * | 2007-06-14 | 2008-12-25 | Canon Inc | 情報処理方法及び情報処理装置 |
| CN101727182A (zh) * | 2010-01-28 | 2010-06-09 | 南京航空航天大学 | 头盔式虚拟现实环境中参与者实际手的可视化方法和系统 |
| JP2011227644A (ja) * | 2010-04-19 | 2011-11-10 | Sony Corp | 画像処理装置、画像処理方法及びプログラム |
| US20120105473A1 (en) * | 2010-10-27 | 2012-05-03 | Avi Bar-Zeev | Low-latency fusing of virtual and real content |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220083144A1 (en) | 2022-03-17 |
| KR20150103723A (ko) | 2015-09-11 |
| CN105027190B (zh) | 2019-06-21 |
| AU2014204252B2 (en) | 2017-12-14 |
| US20200393910A1 (en) | 2020-12-17 |
| US20180095541A1 (en) | 2018-04-05 |
| US20220253150A1 (en) | 2022-08-11 |
| US9720505B2 (en) | 2017-08-01 |
| US20140184496A1 (en) | 2014-07-03 |
| US11550401B2 (en) | 2023-01-10 |
| EP2951811A4 (en) | 2016-08-17 |
| CN105027190A (zh) | 2015-11-04 |
| WO2014106823A3 (en) | 2014-12-11 |
| US10540014B2 (en) | 2020-01-21 |
| WO2014106823A2 (en) | 2014-07-10 |
| EP2951811A2 (en) | 2015-12-09 |
| JP2016509292A (ja) | 2016-03-24 |
| AU2014204252A1 (en) | 2015-08-06 |
| US20230376121A1 (en) | 2023-11-23 |
| US10168791B2 (en) | 2019-01-01 |
| CA2896985A1 (en) | 2014-07-10 |
| US20190278379A1 (en) | 2019-09-12 |
| US20230161418A1 (en) | 2023-05-25 |
| US11762478B2 (en) | 2023-09-19 |
| US11073916B2 (en) | 2021-07-27 |
| US11334171B2 (en) | 2022-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11762478B2 (en) | Virtual or augmediated topological sculpting, manipulation, creation, or interaction with devices, objects, materials, or other entities | |
| US20230079929A1 (en) | Methods and systems for creating virtual and augmented reality | |
| US11656677B2 (en) | Planar waveguide apparatus with diffraction element(s) and system employing same | |
| JP7110252B2 (ja) | 仮想および拡張現実を作成する方法およびシステム | |
| US10203762B2 (en) | Methods and systems for creating virtual and augmented reality | |
| CN104011788B (zh) | 用于增强和虚拟现实的系统和方法 | |
| Berkman | History of virtual reality | |
| Wang | High-Performance Many-Light Rendering | |
| Chiu et al. | Continuous circular scribble arts. | |
| Bonner et al. | Children, guidebooks, SMS and virtual characters | |
| NZ727637B2 (en) | Methods and systems for creating virtual and augmented reality |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190613 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190613 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20190613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200630 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200721 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20201020 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210309 |