JP2018526634A - 正確な道路特性データベースを生成、更新および供給する、車両およびサーバデータベースによる2段階式の物体データ処理のためのシステムおよび方法 - Google Patents
正確な道路特性データベースを生成、更新および供給する、車両およびサーバデータベースによる2段階式の物体データ処理のためのシステムおよび方法 Download PDFInfo
- Publication number
- JP2018526634A JP2018526634A JP2018506842A JP2018506842A JP2018526634A JP 2018526634 A JP2018526634 A JP 2018526634A JP 2018506842 A JP2018506842 A JP 2018506842A JP 2018506842 A JP2018506842 A JP 2018506842A JP 2018526634 A JP2018526634 A JP 2018526634A
- Authority
- JP
- Japan
- Prior art keywords
- data set
- vehicle
- data
- road
- server database
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012545 processing Methods 0.000 title claims abstract description 109
- 238000000034 method Methods 0.000 title claims abstract description 81
- 238000010972 statistical evaluation Methods 0.000 claims abstract description 7
- 238000012805 post-processing Methods 0.000 claims abstract description 5
- 238000012546 transfer Methods 0.000 claims abstract description 5
- 238000011156 evaluation Methods 0.000 claims description 11
- 238000005070 sampling Methods 0.000 claims description 10
- 230000036961 partial effect Effects 0.000 claims description 6
- 238000001514 detection method Methods 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 claims description 4
- 238000004891 communication Methods 0.000 description 36
- 230000008569 process Effects 0.000 description 23
- 230000006870 function Effects 0.000 description 18
- 230000009466 transformation Effects 0.000 description 18
- 238000004422 calculation algorithm Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 7
- 238000010295 mobile communication Methods 0.000 description 6
- 230000000875 corresponding effect Effects 0.000 description 5
- 238000000844 transformation Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 4
- 230000002596 correlated effect Effects 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 238000013500 data storage Methods 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000007613 environmental effect Effects 0.000 description 3
- 230000000670 limiting effect Effects 0.000 description 3
- 230000004807 localization Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000012552 review Methods 0.000 description 3
- 238000003860 storage Methods 0.000 description 3
- 230000001960 triggered effect Effects 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000013480 data collection Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000007726 management method Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000010813 municipal solid waste Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000009877 rendering Methods 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000000638 solvent extraction Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/29—Geographical information databases
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/44—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for communication between vehicles and infrastructures, e.g. vehicle-to-cloud [V2C] or vehicle-to-home [V2H]
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Databases & Information Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Multimedia (AREA)
- Traffic Control Systems (AREA)
- Radar, Positioning & Navigation (AREA)
- Instructional Devices (AREA)
- Navigation (AREA)
- Automation & Control Theory (AREA)
Abstract
Description
本発明によって解決されるべき課題は、公知の車両、データベース、およびデータベースを形成するための方法を改善することであり、これらはさらに、効果的な情報を車両に供給することによって、高度自動運転(HAD:Highly Automated Driving)、または自律運転、または自動運転、または他の車両制御アプリケーション、または正確な車両位置特定を実現する。
・ズームオプション:処理されるべき物体の近傍において取得された周囲データセットを選択し、良好な認識結果のために大きくかつ鮮明に表示する。より遠くに位置する周囲データセットを、他の物体に対する物体の段階的な三角測量および位置特定のために使用することができる。これによって、低品位の(lean)処理アルゴリズムを用いて、良好な認識結果および正確な位置特定結果が得られる。
・クローズアップオプション:各周囲データセットにおいて、関心のある物体の近傍の周囲データセットを選択する。近傍のみが関心の対象なので、そこでは、認識および相対的な測定値が良好に機能する、かつ/または低品位の処理アルゴリズムを使用することができる。
・往復的な移動オプション:近い距離から、または異なる視野角および距離から、したがってより低い処理能力でもって、関心のある物体を特定するために、複数の周囲データセットを往き来する。
・シーケンスオプション:一連の周囲データセットに対して連続的に、アルゴリズムの異なるセットを実行する。リアルタイム処理で要求されるように、全ての物体を並行して処理および認識する必要はない。これによって、処理能力に対する要求を大幅に下げながら、適用される全体の処理に関する可能性が高められる。
・レビューオプション:最後の周囲データセットから過去の周囲データセットへと遡って処理する。例えばHAD制御アプリケーションが行うようなリアルタイム処理と比較して、最新の周囲データセットから、その遠く離れた場所、したがって将来車両に接近してくるものを予測する必要はない。これによっても、低品位のアルゴリズムがもたらされ、また必要とされる処理能力が下げられる。
・方法1:上記において説明したように、第1のデータセットは、空の道路の、走行に関連する物体の物体記述を含んでいる。これを、周囲データセットにおける同一の物体を高速に検出および検査するために使用することができる。しかしながらこのために、そのような比較が実現される前に、周囲データセットは、少なくとも所定の第1の物体レベルになるまで処理されなければならない。例えば、停止標識が雪によって部分的に覆われている場合には、第1のデータセットの物体データと比較するための物体として、その停止標識を認識することは不可能である可能性が極めて高い。
・方法2:上記において説明したように、第1のデータセットが、種々のやり方での、また異なる視野角からのイメージとしてのレンダリングを実現する、ベクトルグラフィックフォーマットを含んでいる。周囲データセットにおけるイメージの各々については、空の道路またはその一部の各イメージをレンダリングすることができ、そのイメージは、期待される場所における走行に関連する物体および空の道路のビューを、各センサがその空の道路を「見ている」ように示す。これによって、既にイメージレベルでの比較が実現される。例えば、カメラセンサからのイメージを比較するために、人間が見ているように、また各カメラの視野角から見ているように、各イメージを第1のデータセットからレンダリングすることができる。レーダセンサからのイメージに関しては、レーダセンサが、反射率情報およびランタイム情報と共に世界を見るように、第1のデータセットから各イメージをレンダリングすることができる。周囲データセットを、既にイメージレベルで第1のデータセットと比較することによって、正確な結論により高速に達することができ、また確実性のより高いレベルおよび/またはより低い処理能力でもってこれを実現することができる。周囲データセットを、良好な条件下において、既にイメージレベルで空の道路のイメージと比較することによって、かつ正確な場所における停止標識の形状、また場合によっては、雪によって覆われていないその標識の一部が位置する場所における何らかのマークおよび赤い色を識別することによって、部分的に雪で覆われている停止標識をここでは認識することができる。方法2は、人間が比較のための一種の経験的なグラウンドトゥルースとしての第1のデータセットから生成されたイメージを使用することによってイメージ処理を行う場合に類似するやり方で、物体認識を支援する。
ズーム613:物体の近傍において、他の物体に対するその物体の段階的な三角測量および位置特定のために、より遠くの周囲データセットと共に取得された周囲データセットを選択する。これによって、低品位の処理アルゴリズムを用いて、良好な認識結果および正確な位置特定結果が得られる。
クローズアップ614:各周囲データセットにおいて、関心のある物体の近傍の周囲データセットを選択する。
往復的な移動615:近い距離から、または異なる視野角および距離から、関心のある物体を特定するために、複数の周囲データセットを往き来する。
シーケンス616:一連の周囲データセットに対して連続的に、アルゴリズムの異なるセットを実行する。
レビュー617:最後の周囲データセットから過去の周囲データセットへと遡って処理する。
Claims (12)
- 走行に関連する物体を含んでいる正確な道路特性データベースを、2段階式の物体データ処理によって生成および更新する方法であって、
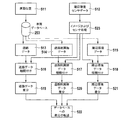
前記2段階式の物体データ処理は、車両(110)による物体データ処理の第1のステップと、サーバデータベース(122)による物体データ処理の第2のステップと、を含んでおり、
前記サーバデータベース(122)は、走行に関連する物体のデータを含んでいる第4のデータセットを記憶しており、
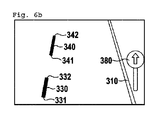
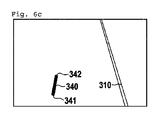
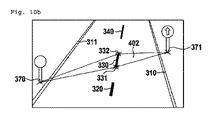
前記走行に関連する物体のデータは、少なくとも、場所情報と、道路物体(310,311)、道路附属物体(370,371,372)、地理的物体または走行に関連付けられた別の物体のうちの少なくとも1つに関する詳細な物体ベースの情報と、をさらに含んでいる、方法において、
前記方法は、
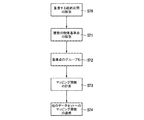
a)車両(110)が、前記サーバデータベース(122)から、関心のあるエリアまたは所定のエリアに関する情報を要求(550)するか、または前記サーバデータベース(122)が、データ伝送をトリガ(551)するステップと、
b)前記サーバデータベース(122)が、前記要求または前記トリガに関連付けられており、かつそれぞれが走行に関連する物体のデータを含んでいる少なくとも1つの第1のデータセットを、前記サーバデータベース(122)に記憶されている第4のデータセットから生成(552)するステップと、
c)前記サーバデータベース(122)が、前記少なくとも1つの第1のデータセットを、前記車両(110)に転送(553)し、該車両(110)が、前記第1のデータセットを車両データベースに記憶するステップと、
d)前記車両(110)が、少なくとも、該車両(110)の経路の特定の区間に沿って、かつ/または特定の時点または特定の間隔および/または少なくとも1つの特定の物体において、走行に関連する物体、道路附属物および地理的物体のうちの少なくとも1つに関連する少なくとも1つの周囲データセットを、前記車両(110)の少なくとも1つのセンサ(210)によって収集(554)するステップと、
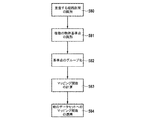
e)前記車両(110)が、前記少なくとも1つの周囲データセットを評価し、前記評価の結果に基づいて、それぞれが走行に関連する物体のデータを含んでいる、少なくとも1つの第2のデータセットを生成(555)することによって、前記物体データ処理の第1のステップを実行するステップと、
f)前記車両(110)が、前記第2のデータセットの物体ベースの情報と、前記道路の前記区間に関連付けられた前記第1のデータセットの物体ベースの情報または前記道路の前記区間に関連付けられた完全な第2のデータセットの物体ベースの情報と、の差分を含んでいる、第3のデータセットを生成(556)するステップと、
g)前記車両(110)が、前記第3のデータセットを前記サーバデータベース(122)に転送(577)するステップと、
h)前記サーバデータベース(122)が、相互に少なくとも部分的に重畳している、複数の経路区間の前記第3のデータセットの中から選択された1つを記憶(558)するステップと、
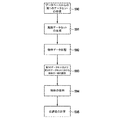
i)前記サーバデータベース(122)が、選択された複数の物体を1つにグループ化することによって、各経路区間において複数の物体から成る少なくとも1つのグループを生成し、かつ前記場所情報を、他のデータセットの同一の物体を含んでいるグループの場所情報と突き合わせる、かつ/または複数の前記経路区間の間で前記物体のグループを整列させることによって、複数の前記経路区間を突き合わせるステップと、
j)前記サーバデータベース(122)が、少なくとも、該サーバデータベース(122)による前記第3のデータセットおよび前記第4のデータセットの統計的な評価および事後処理を含んでいる、物体データ処理の第2のステップを実行(559)するステップと、
k)前記サーバデータベース(122)が、前記第3のデータセットに基づいて、前記サーバデータベース(122)における前記第4のデータセットを更新するステップと、を含んでいる、
方法。 - 前記物体データ処理の第1のステップ(555)において、前記車両(110)は、該車両(110)の前記少なくとも1つのセンサ(210)の検出範囲内の走行に関連する物体の少なくとも一部の少なくとも部分的な物体のデータを生成することを特徴とする、
請求項1記載の方法。 - 前記サーバデータベース(122)の前記物体データ処理の第2の処理ステップ(559)は、前記第3のデータセットの物体のデータおよび前記第4のデータセットの物体のデータを結合させて、走行に関連する情報をさらに提供する道路網の統合モデルを提供する、更新された第4のデータセットを形成することを含んでいることを特徴とする、
請求項1または2記載の方法。 - 少なくとも1つのグループは、道路物体と、道路附属物体および地理的物体のうちの少なくとも1つと、を含んでいることを特徴とする、
請求項1から3までのいずれか1項記載の方法。 - 前記サーバデータベース(122)は、前記車両に、
a)好適には、前記車両によって情報がサンプリングされるべき時間および/または場所を指定するサンプリング要求、
b)特定の物体またはエリアの特別な処理要求、
c)好適には未知のエリアの高解像度イメージの要求、または
d)特定の処理命令または特定のプログラムコード、
のうちの少なくとも1つを伝送することを特徴とする、
請求項1から4までのいずれか1項記載の方法。 - 前記少なくとも1つの第1のデータセットまたは前記第3のデータセットは、信頼水準または統計的なパラメータ、例えば前記データセットにおける物体ベースのデータに関連付けられた平均値または標準偏差のうちの少なくとも1つをさらに含んでいる補助的なデータを含んでいることを特徴とする、
請求項1から5までのいずれか1項記載の方法。 - 前記サーバデータベース(122)は、少なくとも1つの据置型のサーバまたはクラウドベースのインフラストラクチャもしくはそれら両方または他の実施の形態の組合せによって、車両外部に設けられていることを特徴とする、
請求項1から6までのいずれか1項記載の方法。 - 前記車両(110)は、信頼水準が低いデータを有している、かつ/または標準偏差が大きいデータを有している、またはデータを有していない経路の複数の区間をカバーするために、前記経路の少なくとも1つの特定の区間を、補助データに基づいて選択することを特徴とする、
請求項1から7までのいずれか1項記載の方法。 - 前記車両(110)は、CCDセンサ、赤外線センサ、レーザスキャナ、超音波トランスデューサ、レーダセンサ、RFチャネルセンサまたは他の周辺環境センサのようなイメージセンサのうちの少なくとも1つを使用することによって、少なくとも1つの周囲データセットを収集(554)することを特徴とする、
請求項1から8までのいずれか1項記載の方法。 - 前記第4のデータセットを更新するステップの前に、前記サーバデータベース(122)は、前記記憶されているデータの前記場所情報を、前記走行に関連する物体のデータによって特定された前記道路物体の少なくとも一部について利用できる衛星画像情報および/または別の正確な位置情報と相関付けることを特徴とする、
請求項1から9までのいずれか1項記載の方法。 - 走行に関連する物体のデータを含んでいる第4のデータセットを記憶するサーバデータベース(122)において、
前記走行に関連する物体のデータは、少なくとも、場所情報と、道路物体(310,311)、道路附属物体(370,371,372)、地理的物体または走行に関連付けられた別の物体のうちの少なくとも1つに関する詳細な物体ベースの情報と、をさらに含んでおり、
前記サーバデータベース(122)は、前記第4のデータセットから第1のデータセットを生成するための手段を有しており、前記第1のデータセットは、前記第4のデータセットのサブセットであり、さらに車両(110)の経路の特定の区間、および/または特定の時点または特定の間隔、および/または少なくとも1つの特定の物体に対応しており、かつ前記第1のデータセットを前記車両(110)に転送するための別の手段を有しており、各第1のデータセットは、走行に関連する物体のデータを含んでおり、
前記サーバデータベース(122)は、相互に少なくとも部分的に重畳している、複数の経路区間の第3のデータセットを、複数の車両(110)から受信および記憶するための別の手段を有しており、前記第3のデータセットは、各車両(110)によって収集された物体ベースの情報を有している第2のデータセットと、前記第1のデータセットの物体ベースの情報との差分を含んでおり、
前記サーバデータベース(122)は、選択された複数の物体を1つにグループ化することによって、各経路区間において複数の物体から成る少なくとも1つのグループを生成し、かつ前記場所情報を、他のデータセットの同一の物体を含んでいるグループの場所情報と突き合わせ、かつ/または複数の前記経路区間の間で前記物体のグループを整列させることによって、複数の前記経路区間を突き合わせ、
前記サーバデータベース(122)は、前記第3のデータセットおよび前記第4のデータセットの統計的な評価および事後処理を行い、その結果を使用することによって、前記第4のデータセットを更新するための手段を有している、
サーバデータベース(122)。 - 関心のあるエリアおよび/または経路に関する情報を、遠隔のサーバデータベース(122)に伝送し、走行に関連する物体のデータを含んでいる第1のデータセットを受信するための手段を有している車両(110)において、
前記走行に関連する物体のデータは、少なくとも、場所情報と、関心のあるエリア内および/または経路内、かつ/または特定の時間および/または特定の物体における、道路物体(310,311)、道路附属物体(370,371,372)および地理的物体のうちの少なくとも1つに関する詳細な物体ベースの情報と、をさらに含んでおり、
前記車両(110)は、少なくとも、該車両(110)の経路の特定の区間に沿って、かつ/または特定の時点および/または特定の物体において、道路物体(310,311)、道路附属物(370,371,372)および地理的物体のうちの少なくとも1つに関連する少なくとも1つの周囲データセットを収集するための少なくとも1つのセンサ(210)を有しており、
前記車両(110)は、さらに、前記少なくとも1つの周囲データセットを評価し、前記評価の結果に基づいて、それぞれが走行に関連する物体のデータを含んでいる、少なくとも1つの第2のデータセットを生成するための手段を有しており、
前記第2のデータセットの物体ベースの情報と、前記第1のデータセットの物体ベースの情報との差分を含んでいる第3のデータセットを生成するための手段を有しており、
前記車両(110)は、前記第3のデータセットを前記サーバデータベース(122)に転送するための手段を有している、
車両(110)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15180617.1A EP3131020B1 (en) | 2015-08-11 | 2015-08-11 | System and method of a two-step object data processing by a vehicle and a server database for generating, updating and delivering a precision road property database |
| EP15180617.1 | 2015-08-11 | ||
| PCT/EP2016/068003 WO2017025341A1 (en) | 2015-08-11 | 2016-07-28 | System and method of a two-step object data processing by a vehicle and a server database for generating, updating and delivering a precision road property database |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018526634A true JP2018526634A (ja) | 2018-09-13 |
| JP6605707B2 JP6605707B2 (ja) | 2019-11-13 |
Family
ID=53835333
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018506842A Active JP6605707B2 (ja) | 2015-08-11 | 2016-07-28 | 正確な道路特性データベースを生成、更新および供給する、車両およびサーバデータベースによる2段階式の物体データ処理のためのシステムおよび方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10970317B2 (ja) |
| EP (1) | EP3131020B1 (ja) |
| JP (1) | JP6605707B2 (ja) |
| CN (2) | CN115658829A (ja) |
| WO (1) | WO2017025341A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019002925A (ja) * | 2017-06-14 | 2019-01-10 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 自動運転車両用ディジタル地図の作成方法 |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102057532B1 (ko) * | 2016-10-12 | 2019-12-20 | 한국전자통신연구원 | 자율주행 차량의 판단 지능 향상을 위한 주행상황 데이터 공유 및 학습 장치 및 그 동작 방법 |
| DE102017202255A1 (de) | 2017-02-13 | 2018-08-16 | Audi Ag | Verfahren zum Aktualisieren einer digitalen Karte einer kraftfahrzeugexternen Servervorrichtung |
| US20180300341A1 (en) * | 2017-04-18 | 2018-10-18 | International Business Machines Corporation | Systems and methods for identification of establishments captured in street-level images |
| US10929829B1 (en) * | 2017-05-04 | 2021-02-23 | Amazon Technologies, Inc. | User identification and account access using gait analysis |
| JP6747405B2 (ja) * | 2017-08-25 | 2020-08-26 | トヨタ自動車株式会社 | 自車位置自信度演算装置 |
| JP6674430B2 (ja) * | 2017-10-10 | 2020-04-01 | 本田技研工業株式会社 | 運転支援装置 |
| KR102333033B1 (ko) * | 2017-12-07 | 2021-12-01 | 삼성전자주식회사 | 차량 및 그 제어 방법 |
| DE102018204501B3 (de) | 2018-03-23 | 2019-07-04 | Continental Automotive Gmbh | System zur Erzeugung von Konfidenzwerten im Backend |
| DE102018204500A1 (de) * | 2018-03-23 | 2019-09-26 | Continental Automotive Gmbh | System zur Erzeugung von Konfidenzwerten im Backend |
| JP6881369B2 (ja) * | 2018-03-26 | 2021-06-02 | トヨタ自動車株式会社 | 自車位置推定装置 |
| US10420051B2 (en) * | 2018-03-27 | 2019-09-17 | Intel Corporation | Context aware synchronization methods for decentralized V2V networks |
| US11650059B2 (en) * | 2018-06-06 | 2023-05-16 | Toyota Research Institute, Inc. | Systems and methods for localizing a vehicle using an accuracy specification |
| SG11201811275UA (en) * | 2018-06-22 | 2020-01-30 | Beijing Didi Infinity Technology & Development Co Ltd | Systems and methods for updating highly automated driving maps |
| JP6914229B2 (ja) * | 2018-07-09 | 2021-08-04 | 株式会社日立製作所 | 自動運転支援装置及びその方法 |
| US11068515B2 (en) * | 2018-07-24 | 2021-07-20 | Google Llc | Map uncertainty and observation modeling |
| JP7147712B2 (ja) * | 2018-08-31 | 2022-10-05 | 株式会社デンソー | 車両側装置、方法および記憶媒体 |
| DE102018214979A1 (de) * | 2018-09-04 | 2020-03-05 | Robert Bosch Gmbh | Verfahren und System zur verbesserten Objektmarkierung in Sensordaten |
| CN110896530A (zh) * | 2018-09-12 | 2020-03-20 | 百度在线网络技术(北京)有限公司 | 传输和接收数据的方法、装置、设备和存储介质 |
| US20200110817A1 (en) * | 2018-10-04 | 2020-04-09 | Here Global B.V. | Method, apparatus, and system for providing quality assurance for map feature localization |
| KR20200069084A (ko) * | 2018-12-06 | 2020-06-16 | 팅크웨어(주) | 도로 제한 속도 판단 방법, 도로 제한 속도 판단 장치, 전자 기기, 컴퓨터 프로그램 및 컴퓨터 판독 가능한 기록 매체 |
| US11030898B2 (en) * | 2018-12-13 | 2021-06-08 | Here Global B.V. | Methods and systems for map database update based on road sign presence |
| CA3122865A1 (en) * | 2018-12-13 | 2020-06-18 | Continental Holding China Co., Ltd. | Method for detecting and modeling of object on surface of road |
| CN109782364B (zh) * | 2018-12-26 | 2021-08-24 | 华设设计集团股份有限公司 | 基于机器视觉的交通标志牌缺失检测方法 |
| CN113377033B (zh) * | 2019-01-15 | 2024-03-22 | 北京百度网讯科技有限公司 | 数据采集方法、装置、设备及计算机可读存储介质 |
| CN113793550B (zh) * | 2019-01-16 | 2023-06-20 | 北京百度网讯科技有限公司 | 地图数据的采集方法、装置、设备和存储介质 |
| US10838418B2 (en) * | 2019-01-31 | 2020-11-17 | StradVision, Inc. | Method for providing autonomous driving service platform to be used for supporting autonomous driving of vehicles by using competitive computing and information fusion, and server using the same |
| GB2621499B (en) * | 2019-02-25 | 2024-05-08 | Mobileye Vision Technologies Ltd | Systems and methods for vehicle navigation |
| CN110182213A (zh) * | 2019-05-28 | 2019-08-30 | 径卫视觉科技(上海)有限公司 | 一种道路状态检测方法以及相应的系统 |
| CN110533941B (zh) * | 2019-07-09 | 2022-07-19 | 平安科技(深圳)有限公司 | 车辆交流方法、装置、电子设备及计算机介质 |
| DE102019217658A1 (de) * | 2019-11-15 | 2021-05-20 | Robert Bosch Gmbh | Verfahren zum Extrahieren von Merkmalen aus crowd-basiert gesammelten Messdaten |
| US11125575B2 (en) * | 2019-11-20 | 2021-09-21 | Here Global B.V. | Method and apparatus for estimating a location of a vehicle |
| EP3885237A1 (en) * | 2020-03-24 | 2021-09-29 | Aptiv Technologies Limited | Vehicle, system, and method for determining a position of a moveable element in a vehicle |
| JP2021165910A (ja) * | 2020-04-06 | 2021-10-14 | トヨタ自動車株式会社 | データ送信装置およびデータ送信方法 |
| CN111586606B (zh) * | 2020-04-10 | 2021-08-31 | 腾讯科技(深圳)有限公司 | 一种区域环境的评估方法及装置 |
| JP7422029B2 (ja) * | 2020-07-29 | 2024-01-25 | 本田技研工業株式会社 | 通信システム、情報処理装置、情報処理方法、移動体、移動体の制御方法、及びプログラム |
| US11568621B2 (en) * | 2020-12-31 | 2023-01-31 | Blizzard Entertainment, Inc. | Dynamic character model fitting of three-dimensional digital items |
| CN112965963B (zh) * | 2021-02-05 | 2023-07-21 | 同盾科技有限公司 | 信息处理方法 |
| CN116303866B (zh) * | 2023-05-18 | 2023-09-22 | 北京明立测绘科技有限公司 | 数据处理方法、装置、电子设备及存储介质 |
| CN117278637B (zh) * | 2023-11-23 | 2024-02-09 | 成都秦川物联网科技股份有限公司 | 基于工业物联网主服务平台的分布式数据反馈处理系统 |
Family Cites Families (75)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4796191A (en) * | 1984-06-07 | 1989-01-03 | Etak, Inc. | Vehicle navigational system and method |
| DE19604083B4 (de) | 1995-03-23 | 2006-06-29 | T-Mobile Deutschland Gmbh | Verfahren zur Parametrisierung von Fahrzeugrouten in Fahrzeugleit- und/oder Informationssystemen |
| JP3564547B2 (ja) | 1995-04-17 | 2004-09-15 | 本田技研工業株式会社 | 自動走行誘導装置 |
| US6047234A (en) | 1997-10-16 | 2000-04-04 | Navigation Technologies Corporation | System and method for updating, enhancing or refining a geographic database using feedback |
| US6161071A (en) | 1999-03-12 | 2000-12-12 | Navigation Technologies Corporation | Method and system for an in-vehicle computing architecture |
| US6366851B1 (en) | 1999-10-25 | 2002-04-02 | Navigation Technologies Corp. | Method and system for automatic centerline adjustment of shape point data for a geographic database |
| US6674434B1 (en) | 1999-10-25 | 2004-01-06 | Navigation Technologies Corp. | Method and system for automatic generation of shape and curvature data for a geographic database |
| EP1111338B1 (en) | 1999-12-20 | 2009-02-25 | Navteq North America, LLC | Map data architecture for vehicle computer system |
| US6173231B1 (en) | 2000-01-31 | 2001-01-09 | Navigation Technologies Corp. | Method and system for collecting data concerning thermal properties of roads for a geographic database and use thereof in a vehicle safety system |
| DE10030932A1 (de) | 2000-06-24 | 2002-01-03 | Bosch Gmbh Robert | Verfahren zur Erzeugung, Prüfung, Ergänzung und/oder Aktualisierung von Straßenkartendaten |
| DE10055287B4 (de) | 2000-11-08 | 2005-09-29 | Mobiworx Telematik Gmbh | Verfahren und Vorrichtung zum Erfassen und Verarbeiten von Zustandsdaten, die an Bord eines Straßendienst- oder Landwirtschaftsfahrzeuges aufgenommen sind |
| DE10065593A1 (de) | 2000-12-28 | 2002-07-04 | Bosch Gmbh Robert | Verfahren und Vorrichtung zum Erzeugen von Straßenabschnittdaten für eine digitale Landkarte |
| JP3849435B2 (ja) | 2001-02-23 | 2006-11-22 | 株式会社日立製作所 | プローブ情報を利用した交通状況推定方法及び交通状況推定・提供システム |
| DE10131800A1 (de) | 2001-06-30 | 2003-01-16 | Bosch Gmbh Robert | Verfahren zum Betrieb eines Navigationssystems für ein Fahrzeug, insbesondere ein Kraftfahrzeug und Navigationssystem |
| US7552008B2 (en) | 2001-07-18 | 2009-06-23 | Regents Of The University Of Minnesota | Populating geospatial database for onboard intelligent vehicle applications |
| US9286795B2 (en) | 2003-05-09 | 2016-03-15 | Dimitri Vorona | System for transmitting, processing, receiving, and displaying traffic information |
| US7440842B1 (en) | 2003-05-09 | 2008-10-21 | Dimitri Vorona | System for transmitting, processing, receiving, and displaying traffic information |
| JP3928962B2 (ja) | 2003-08-21 | 2007-06-13 | 株式会社日立製作所 | 通信型車両ナビゲーションシステムのサーバ装置及び車載端末装置 |
| US8600604B2 (en) | 2004-01-29 | 2013-12-03 | Intelligent Mechatronic Systems Inc. | Data integrity verification device |
| DE602004028568D1 (de) | 2004-02-20 | 2010-09-23 | Harman Becker Automotive Sys | Vorrichtung und Verfahren zum Erzeugen von Umgebungsparametern und zum Bestimmen von Wetterinformationen |
| JP2005337871A (ja) | 2004-05-26 | 2005-12-08 | Matsushita Electric Ind Co Ltd | 位置情報受信装置、形状マッチング方法 |
| DE102004047122A1 (de) | 2004-09-27 | 2006-04-13 | Daimlerchrysler Ag | Verfahren zum Überwachen eines Fahrzeugs |
| DE102004050597B4 (de) | 2004-10-15 | 2009-02-12 | Daimler Ag | Wildwechselwarnvorrichtung und Verfahren zur Warnung vor lebenden Objekten auf einer Verkehrsstraße |
| US7355509B2 (en) | 2005-02-25 | 2008-04-08 | Iwapi Inc. | Smart modem device for vehicular and roadside applications |
| US20060271286A1 (en) | 2005-05-27 | 2006-11-30 | Outland Research, Llc | Image-enhanced vehicle navigation systems and methods |
| CA2609663A1 (en) | 2005-06-06 | 2006-12-14 | Tomtom International B.V. | Navigation device with camera-info |
| JP4735179B2 (ja) | 2005-10-12 | 2011-07-27 | 株式会社デンソー | 車両制御装置 |
| JP4812415B2 (ja) * | 2005-11-30 | 2011-11-09 | 富士通株式会社 | 地図情報更新システム、中央装置、地図情報更新方法、及びコンピュータプログラム |
| US8417442B2 (en) | 2006-09-19 | 2013-04-09 | Intuitive Control Systems, Llc | Collection, monitoring, analyzing and reporting of traffic data via vehicle sensor devices placed at multiple remote locations |
| FR2907582A1 (fr) | 2006-10-23 | 2008-04-25 | Nodbox Sarl | Procede de determination d'algorithmes routiers localises et adaptatifs pour la cartographie adas et la gestion des routes |
| DE102006053484A1 (de) | 2006-11-14 | 2008-05-15 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Erfassung von Daten über die Verkehrslage in einem Straßennetz |
| JP4663620B2 (ja) | 2006-12-07 | 2011-04-06 | 日立オートモティブシステムズ株式会社 | 車載情報端末、地図サーバ、および車載システム |
| CN101641610A (zh) * | 2007-02-21 | 2010-02-03 | 电子地图北美公司 | 用于包含绝对及相对坐标的车辆导航及领航的系统及方法 |
| US20080243378A1 (en) | 2007-02-21 | 2008-10-02 | Tele Atlas North America, Inc. | System and method for vehicle navigation and piloting including absolute and relative coordinates |
| US8275522B1 (en) | 2007-06-29 | 2012-09-25 | Concaten, Inc. | Information delivery and maintenance system for dynamically generated and updated data pertaining to road maintenance vehicles and other related information |
| US7382244B1 (en) | 2007-10-04 | 2008-06-03 | Kd Secure | Video surveillance, storage, and alerting system having network management, hierarchical data storage, video tip processing, and vehicle plate analysis |
| RU2010123016A (ru) | 2007-11-06 | 2011-12-20 | Теле Атлас Норт Америка Инк. (Us) | Способ и система для использования данных измерений от множества транспортных средств для детектирования изменений реального мира для использования при обновления карты |
| CN101952688A (zh) * | 2008-02-04 | 2011-01-19 | 电子地图北美公司 | 用于与传感器检测到的对象进行地图匹配的方法 |
| US20090254241A1 (en) | 2008-04-04 | 2009-10-08 | Basir Otman A | System and method for collecting data from many vehicles |
| DE102009017731A1 (de) | 2008-04-30 | 2009-11-05 | Continental Teves Ag & Co. Ohg | Selbstlernende Karte auf Basis von Umfeldsensoren |
| US20090276153A1 (en) | 2008-05-01 | 2009-11-05 | Chun-Huang Lee | Navigating method and navigation apparatus using road image identification |
| EP2535883B1 (en) | 2008-07-10 | 2014-03-19 | Mitsubishi Electric Corporation | Train-of-vehicle travel support device |
| US8284995B2 (en) * | 2008-07-16 | 2012-10-09 | Volkswagen Of America, Inc. | Method for updating a geographic database for an in-vehicle navigation system |
| AU2008362588A1 (en) | 2008-10-08 | 2010-04-15 | Tomtom International B.V. | Improvements relating to navigation apparatus used in-vehicle |
| RU2011119211A (ru) | 2008-11-13 | 2012-12-20 | Асер Рич Лимитед. | Система и способ повышения безопасности транспортного средства путем улучшения знания ситуации водителем транспортного средства |
| WO2010068185A1 (en) | 2008-12-09 | 2010-06-17 | Tele Atlas B.V. | Method of generating a geodetic reference database product |
| CN101436211B (zh) * | 2008-12-19 | 2010-07-21 | 北京交通发展研究中心 | 基于缓冲区分析的城市道路网络数据增量识别方法及增量更新方法 |
| JP5216665B2 (ja) * | 2009-03-31 | 2013-06-19 | アイシン・エィ・ダブリュ株式会社 | 地図データ更新システム及び地図データ更新プログラム、並びにこれを利用したナビゲーション装置及び車両制御装置 |
| GB2472969B (en) | 2009-05-20 | 2011-06-29 | Modulprodukter As | Driving assistance device and vehicle system |
| US20100138142A1 (en) | 2009-07-17 | 2010-06-03 | Karen Pease | Vehicle Range Finder |
| KR101291067B1 (ko) | 2009-11-26 | 2013-08-07 | 한국전자통신연구원 | 차량 제어 장치 및 그 자율 주행 방법, 지역 서버 장치 및 그 자율 주행 서비스 방법, 전역 서버 장치 및 그 자율 주행 서비스 방법 |
| FI122084B (fi) | 2009-12-03 | 2011-08-15 | Teconer Oy | Päätelaiteperusteinen tieolosuhteiden kartoitusmenetelmä ja -järjestelmä |
| JP2012002595A (ja) | 2010-06-15 | 2012-01-05 | Sony Corp | 情報処理装置、情報処理方法、情報処理システム、及びプログラム |
| GB201018815D0 (en) | 2010-11-08 | 2010-12-22 | Tomtom Int Bv | High-definition weather for improved routing and navigation systems |
| US8467810B2 (en) * | 2010-11-29 | 2013-06-18 | Navteq B.V. | Method and system for reporting errors in a geographic database |
| US20120203428A1 (en) | 2011-02-08 | 2012-08-09 | Honda Motor Co., Ltd | Road profile scanning method and vehicle using side facing sensors |
| US20120245817A1 (en) | 2011-03-23 | 2012-09-27 | Tk Holdings Inc. | Driver assistance system |
| DE102011083378B4 (de) | 2011-09-26 | 2015-07-16 | Robert Bosch Gmbh | Vorrichtung und Verfahren zum Überprüfen von Streckendaten |
| DE102011083965A1 (de) | 2011-10-04 | 2013-04-04 | Robert Bosch Gmbh | Vorrichtung und Verfahren zum geometrischen Kalibrieren von mittels eines Sensorsystems eines Fahrzeugs gebildeten Sensordaten |
| DE102011085287A1 (de) | 2011-10-27 | 2013-05-02 | Robert Bosch Gmbh | Verfahren zur Ermittlung der Bodenbeschaffenheit |
| US20130147661A1 (en) | 2011-12-07 | 2013-06-13 | International Business Machines Corporation | System and method for optical landmark identification for gps error correction |
| TWI455073B (zh) | 2011-12-14 | 2014-10-01 | Ind Tech Res Inst | 車用特定路況警示裝置、系統與方法 |
| US20150178572A1 (en) | 2012-05-23 | 2015-06-25 | Raqib Omer | Road surface condition classification method and system |
| US20140160295A1 (en) | 2012-12-06 | 2014-06-12 | Honda Motor Co., Ltd. | Road condition detection |
| US20140163768A1 (en) | 2012-12-11 | 2014-06-12 | At&T Intellectual Property I, L.P. | Event and condition determination based on sensor data |
| EP2757539B1 (en) | 2013-01-22 | 2020-05-20 | Klimator AB | A method and an arrangement for collecting and processing data related to road status |
| US9224293B2 (en) | 2013-03-16 | 2015-12-29 | Donald Warren Taylor | Apparatus and system for monitoring and managing traffic flow |
| US9070290B2 (en) | 2013-03-16 | 2015-06-30 | Donald Warren Taylor | Apparatus and system for monitoring and managing traffic flow |
| WO2014166532A1 (en) | 2013-04-10 | 2014-10-16 | Harman Becker Automotive Systems Gmbh | Navigation system and method of determining a vehicle position |
| DE102013007171A1 (de) | 2013-04-24 | 2013-12-19 | Daimler Ag | Verkehrsinformationssystem |
| CN104215251A (zh) * | 2013-05-31 | 2014-12-17 | 北京图盟科技有限公司 | 导航电子地图中导航拓扑数据的更新方法及相关装置 |
| EP2821307B1 (en) | 2013-07-03 | 2016-09-28 | Volvo Car Corporation | A vehicle system, a vehicle and a method for autonomous road irregularity avoidance |
| US8744822B2 (en) | 2013-08-08 | 2014-06-03 | Iteris, Inc. | Pavement condition analysis from modeling impact of traffic characteristics, weather data and road conditions on segments of a transportation network infrastructure |
| JP2015052548A (ja) | 2013-09-09 | 2015-03-19 | 富士重工業株式会社 | 車外環境認識装置 |
| US9346400B2 (en) * | 2013-12-20 | 2016-05-24 | Ford Global Technologies, Llc | Affective user interface in an autonomous vehicle |
-
2015
- 2015-08-11 EP EP15180617.1A patent/EP3131020B1/en active Active
-
2016
- 2016-07-28 CN CN202211317068.3A patent/CN115658829A/zh active Pending
- 2016-07-28 JP JP2018506842A patent/JP6605707B2/ja active Active
- 2016-07-28 US US15/751,850 patent/US10970317B2/en active Active
- 2016-07-28 CN CN201680043855.XA patent/CN107851125B9/zh active Active
- 2016-07-28 WO PCT/EP2016/068003 patent/WO2017025341A1/en active Application Filing
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019002925A (ja) * | 2017-06-14 | 2019-01-10 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 自動運転車両用ディジタル地図の作成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180246907A1 (en) | 2018-08-30 |
| WO2017025341A1 (en) | 2017-02-16 |
| CN107851125B9 (zh) | 2023-10-17 |
| EP3131020B1 (en) | 2017-12-13 |
| JP6605707B2 (ja) | 2019-11-13 |
| CN107851125B (zh) | 2022-09-23 |
| EP3131020A1 (en) | 2017-02-15 |
| CN107851125A (zh) | 2018-03-27 |
| CN115658829A (zh) | 2023-01-31 |
| US10970317B2 (en) | 2021-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6605707B2 (ja) | 正確な道路特性データベースを生成、更新および供給する、車両およびサーバデータベースによる2段階式の物体データ処理のためのシステムおよび方法 | |
| JP6714688B2 (ja) | 正確な道路データベースを生成および更新するために道路データ物体を突き合わせるためのシステムおよび方法 | |
| JP2018525633A (ja) | 正確な車両位置特定のためのシステムおよび方法 | |
| US20240255291A1 (en) | Sparse map for autonomous vehicle navigation | |
| US11874119B2 (en) | Traffic boundary mapping | |
| EP3137850B1 (en) | Method and system for determining a position relative to a digital map | |
| JP2020500290A (ja) | 位置特定基準データを生成及び使用する方法及びシステム | |
| EP4022255A1 (en) | Method for aligning crowd-sourced data to provide an environmental data model of a scene |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180404 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190514 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190814 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191007 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191016 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6605707 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |