JP2018091643A - 磁界検出センサ - Google Patents
磁界検出センサ Download PDFInfo
- Publication number
- JP2018091643A JP2018091643A JP2016232819A JP2016232819A JP2018091643A JP 2018091643 A JP2018091643 A JP 2018091643A JP 2016232819 A JP2016232819 A JP 2016232819A JP 2016232819 A JP2016232819 A JP 2016232819A JP 2018091643 A JP2018091643 A JP 2018091643A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- detection
- signal
- magnetic
- bias
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/028—Electrodynamic magnetometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/063—Magneto-impedance sensors; Nanocristallin sensors
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Nanotechnology (AREA)
- Measuring Magnetic Variables (AREA)
Abstract
【課題】消費電流の抑制、検出精度の向上、および磁界検出範囲の拡大が可能な磁界検出センサを提供すること。
【解決手段】磁気インピーダンス効果が生じる第1の磁気インピーダンス素子12Aおよび第2の磁気インピーダンス素子12Bを利用し、前者にはバイアスコイル14で交流バイアス磁界を印加し、後者にはバイアスを印加せず、異なるモードで動作させる。第1の磁気インピーダンス素子12Aおよび第2の磁気インピーダンス素子12Bの各インピーダンス変化に応じた2種類の電気信号SG2、SG2Bを生成し、複数種類の検出方法を組み合わせて使用する。磁界の大きさに応じて変化する重み係数を用いて複数種類の検出方法の出力に重み付けを行い、計算結果を最適化する。複数の検出特性のオフセット調整、極性調整などを行って、検出特性の形状等を互いに近づける。
【選択図】図1
【解決手段】磁気インピーダンス効果が生じる第1の磁気インピーダンス素子12Aおよび第2の磁気インピーダンス素子12Bを利用し、前者にはバイアスコイル14で交流バイアス磁界を印加し、後者にはバイアスを印加せず、異なるモードで動作させる。第1の磁気インピーダンス素子12Aおよび第2の磁気インピーダンス素子12Bの各インピーダンス変化に応じた2種類の電気信号SG2、SG2Bを生成し、複数種類の検出方法を組み合わせて使用する。磁界の大きさに応じて変化する重み係数を用いて複数種類の検出方法の出力に重み付けを行い、計算結果を最適化する。複数の検出特性のオフセット調整、極性調整などを行って、検出特性の形状等を互いに近づける。
【選択図】図1
Description
本発明は、磁気インピーダンス効果を利用する磁界検出センサに関する。
磁気インピーダンス効果を利用した磁気検出素子(MI素子)を用いた磁気センサの従来技術が例えば特許文献1〜特許文献3に示されている。例えば、アモルファス合金ワイヤなどの高透磁率合金磁性体においては、表皮効果の影響により、外部磁界に応じてインピーダンスが敏感に変化する。これが磁気インピーダンス効果である。
特許文献1に示された構成においては、コルピッツ発振回路にMI素子が組み込まれている。また、このMI素子に巻回されたコイルに交流バイアス電流が流されることにより、MI素子に交流バイアス磁界がかけられる。そして、外部磁界とバイアス磁界に応じたMI素子のインピーダンス変化により、発振回路の出力に振幅変調波形が得られる。この振幅変調波形における高低差が外部磁界の強さに対応する。したがって、振幅変調波形を検波した後で、直流成分を除去し、コンパレータで電圧を比較することにより、パルス幅変調されたデジタル波形の出力信号を得ている。つまり、発振回路の出力における振幅の変化分から外部磁界の強さを求めるようにしている。
特許文献2に示された構成においては、発振回路の出力する高周波の正弦波電流を、バッファ回路を経由して、薄膜磁気インピーダンス素子の磁気コアの両端に印加している。検波回路は、磁気インピーダンス素子に印加された外部磁界に応じて変化する高周波電流の変化量から外部磁界の磁気変化量を検出する。また、磁気インピーダンス素子のヒステリシスを解消するヒステリシスキャンセル回路を具備している。また、磁気インピーダンス素子の動作点を移動するためにバイアスコイルに電流を流している。更に、検出された磁界に応じて負帰還コイルに電流を流している。
また、特許文献3に示された磁界検出センサにおいては、特別な構成の磁気インピーダンス素子を採用している。すなわち、この磁気インピーダンス素子は、長手方向が磁界の検出方向とされ、磁性膜の磁化容易軸が長手方向に沿う方向に磁気異方性がつけられている。ここで、磁界の検出方向と磁性膜の磁化容易軸とを同方向とすることにより磁気インピーダンス特性をピラミッド型にすることができる。そのため、M字型の特性のように傾きが急峻となるところまで直流及び交流バイアスを掛ける必要が無い。更に、ピラミッド型ではM字型よりもヒステリシスが小さいため検出精度を向上でき、且つ、傾きが全域に亘って所定の傾斜を有していることから、検出範囲を広くすることができる。従って、消費電流を抑えると共に検出精度を高め、且つ、検出範囲を広範とすることができる。
しかしながら、特許文献1および特許文献2に示されているような磁気インピーダンス効果を利用した従来の磁界検出センサにおいては、以下に示すような課題がある。
(1)磁界を検出できる範囲が狭い。
(2)磁気インピーダンス素子の磁気インピーダンス特性がM字型であるため、交流バイアスを用いる場合に、傾きが急峻な位置まで交流バイアスをかけないと高感度の測定ができない。そのため、消費電流が増大する。
(3)磁気インピーダンス特性がM字型の磁気インピーダンス素子は、ピラミッド型と比べてヒステリシスが大きくなる。そのため、検出精度が低下する。
(1)磁界を検出できる範囲が狭い。
(2)磁気インピーダンス素子の磁気インピーダンス特性がM字型であるため、交流バイアスを用いる場合に、傾きが急峻な位置まで交流バイアスをかけないと高感度の測定ができない。そのため、消費電流が増大する。
(3)磁気インピーダンス特性がM字型の磁気インピーダンス素子は、ピラミッド型と比べてヒステリシスが大きくなる。そのため、検出精度が低下する。
一方、特許文献3のようにピラミッド型の磁気インピーダンス特性を有する磁気インピーダンス素子を採用する場合には、上記(2)、(3)の課題を改善できる。しかし、特許文献3の図1に示されている構成の回路を用いて磁界を検出する場合には、外部磁界が大きくなると、特許文献3の図6(d)に示されている微分回路出力に必要なパルスが現れなくなるため、当該パルスの位相を検知できず磁界を検出できない状態になる。したがって、上記(1)の課題を解消できない。
本発明は、上述した事情に鑑みてなされたものであり、その目的は、消費電流の抑制、検出精度の向上、および磁界検出範囲の拡大が可能な磁界検出センサを提供することにある。
前述した目的を達成するために、本発明に係る磁界検出センサは、下記(1)〜(5)を特徴としている。
(1) 磁気インピーダンス効果が生じる磁性材料を含む第1の磁気検出素子および第2の磁気検出素子と、
前記第1の磁気検出素子の前記磁性材料に対してバイアス磁界を印加するバイアスコイルと、
前記第1の磁気検出素子および前記第2の磁気検出素子の前記磁性材料に対して高周波電流を供給する高周波発振回路と、
前記バイアスコイルに交流バイアス電流を供給する交流バイアス回路と、
前記バイアス磁界が印加される状態の前記第1の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第1の検出信号を生成する第1の検出回路と、
前記バイアス磁界が印加されない状態の前記第2の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第2の検出信号を生成する第2の検出回路と、
前記第1の検出信号および前記第2の検出信号に基づいて、外部磁界の大きさおよび方向を算出する磁界演算部と、
を備えた磁界検出センサ。
(1) 磁気インピーダンス効果が生じる磁性材料を含む第1の磁気検出素子および第2の磁気検出素子と、
前記第1の磁気検出素子の前記磁性材料に対してバイアス磁界を印加するバイアスコイルと、
前記第1の磁気検出素子および前記第2の磁気検出素子の前記磁性材料に対して高周波電流を供給する高周波発振回路と、
前記バイアスコイルに交流バイアス電流を供給する交流バイアス回路と、
前記バイアス磁界が印加される状態の前記第1の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第1の検出信号を生成する第1の検出回路と、
前記バイアス磁界が印加されない状態の前記第2の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第2の検出信号を生成する第2の検出回路と、
前記第1の検出信号および前記第2の検出信号に基づいて、外部磁界の大きさおよび方向を算出する磁界演算部と、
を備えた磁界検出センサ。
(2) 前記第1の検出回路は、
外部磁界が印加されない状態の前記第1の磁気検出素子の特性におけるインピーダンスの極値位置を基準点とし、前記基準点からのインピーダンスの変化量に応じて変化する電気信号を生成すると共に、
前記電気信号の電圧の変化の方向が切り替わる各頂点のタイミングにおける振幅を検出する振幅検出回路と、前記電気信号の電位が前記第1の磁気検出素子の特性における前記基準点を通過するタイミングを検出する位相検出回路と、の少なくとも一方を含む、
ことを特徴とする上記(1)に記載の磁界検出センサ。
外部磁界が印加されない状態の前記第1の磁気検出素子の特性におけるインピーダンスの極値位置を基準点とし、前記基準点からのインピーダンスの変化量に応じて変化する電気信号を生成すると共に、
前記電気信号の電圧の変化の方向が切り替わる各頂点のタイミングにおける振幅を検出する振幅検出回路と、前記電気信号の電位が前記第1の磁気検出素子の特性における前記基準点を通過するタイミングを検出する位相検出回路と、の少なくとも一方を含む、
ことを特徴とする上記(1)に記載の磁界検出センサ。
(3) 前記磁界演算部は、前記第1の検出信号および前記第2の検出信号の少なくとも一方に対して状況に応じて変化する重み付けを行い、外部磁界の大きさを算出する、
ことを特徴とする上記(1)に記載の磁界検出センサ。
ことを特徴とする上記(1)に記載の磁界検出センサ。
(4) 前記磁界演算部は、
互いに検出特性が異なる前記第1の検出信号と前記第2の検出信号とを組み合わせて、外部磁界の大きさおよび方向の算出に利用すると共に、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、複数の検出特性が互いに近づくよう、オフセットの補正、および領域毎の極性の補正を行う、
ことを特徴とする上記(1)に記載の磁界検出センサ。
互いに検出特性が異なる前記第1の検出信号と前記第2の検出信号とを組み合わせて、外部磁界の大きさおよび方向の算出に利用すると共に、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、複数の検出特性が互いに近づくよう、オフセットの補正、および領域毎の極性の補正を行う、
ことを特徴とする上記(1)に記載の磁界検出センサ。
(5) 前記磁界演算部は、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、小さい磁界に相当する非線形の領域を線形に近づけるためにゲイン調整を行う、
ことを特徴とする上記(4)に記載の磁界検出センサ。
ことを特徴とする上記(4)に記載の磁界検出センサ。
上記(1)の構成の磁界検出センサによれば、磁界演算部は、バイアス磁界が印加される状態の第1の磁気検出素子のインピーダンス変化特性(第1の検出特性)と、バイアス磁界が印加されない第2の磁気検出素子のインピーダンス変化特性(第2の検出特性)との両方を利用して外部磁界の大きさおよび方向を算出することができる。互いに種類が異なる第1の検出特性および第2の検出特性は、磁界の大きさ等の領域の違いによって、検出が不可能な状態になったり、検出精度や感度が低下する可能性がある。しかし、例えば磁界の大きさに応じて第1の検出特性および第2の検出特性の両方を使い分けることにより、磁界の広い範囲に亘って、高い検出精度を確保できる。
上記(2)の構成の磁界検出センサによれば、第1の検出回路が、第1の磁気検出素子の基準点に対するインピーダンスの変化量に相当する電気信号を生成する。したがって、動作点を基準点からずらすために大きな直流バイアス電流を流す必要がない。また、振幅検出回路および位相検出回路の少なくとも一方を利用することにより、例えば磁界が比較的小さい領域において高精度の検出結果が得られる。
上記(3)の構成の磁界検出センサによれば、第1の検出信号および第2の検出信号の両方を利用して磁界の大きさを算出する場合に、上記の重み付けを行うことにより、算出結果を最適化することが可能になる。例えば、第1の検出信号を用いた検出処理および第2の検出信号を用いた検出処理の各々において、得意とする磁界範囲における重みを大きくすることにより、磁界の大きさの広い範囲に亘り、算出結果の誤差を低減できる。
上記(4)の構成の磁界検出センサによれば、第1の検出信号の検出特性の形状と、第2の検出信号の検出特性の形状とが大きく異なる状況であっても、これらの検出特性の形状が互いに近づくように修正できる。したがって、複数の検出特性の重み付けをある領域で切り替えるような場合に、算出結果の数値が不連続になるのを避けることができ、切替処理が容易になる。
上記(5)の構成の磁界検出センサによれば、検出特性の中の小さい磁界に相当する領域に非線形、あるいは不連続な箇所が発生した場合であっても、領域毎に適切なゲイン調整を行うことにより、全体を線形の検出特性に修正することができる。したがって、広い範囲に亘って検出精度を向上することができる。
本発明の磁界検出センサによれば、消費電流の抑制、検出精度の向上、および磁界検出範囲の拡大が可能になる。すなわち、互いに種類が異なる前記第1の検出特性および第2の検出特性は、磁界の大きさ等の領域の違いによって、検出が不可能な状態になったり、検出精度や感度が低下する可能性があるが、例えば磁界の大きさに応じて第1の検出特性および第2の検出特性の両方を使い分けることにより、磁界の広い範囲に亘って、高い検出精度を確保できる。また、基準点からのインピーダンスの変化量に応じて変化する電気信号を生成することにより、動作点を前記基準点からずらす必要がなく、大きな直流バイアス電流を流す必要がなくなる。
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態(以下、「実施形態」という。)を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
本発明に関する具体的な実施形態について、各図を参照しながら以下に説明する。
<磁界検出センサ200の構成例>
本発明の実施形態における磁界検出センサ200の構成例を図1に示す。
図1に示した磁界検出センサ200は、駆動ユニット20および検出ユニット30により構成されている。詳細については後で説明するが、駆動ユニット20に含まれている2個の磁気インピーダンス素子12A、12Bの各々は、磁気インピーダンス効果が生じる磁性材料を含んでいる。つまり、この磁界検出センサ200は磁気インピーダンス素子12A、12Bを利用して外部磁界を検出する。
本発明の実施形態における磁界検出センサ200の構成例を図1に示す。
図1に示した磁界検出センサ200は、駆動ユニット20および検出ユニット30により構成されている。詳細については後で説明するが、駆動ユニット20に含まれている2個の磁気インピーダンス素子12A、12Bの各々は、磁気インピーダンス効果が生じる磁性材料を含んでいる。つまり、この磁界検出センサ200は磁気インピーダンス素子12A、12Bを利用して外部磁界を検出する。
図1に示した駆動ユニット20は、発振回路21、ブリッジ回路22A、22B、信号処理部23A、および23Bを備えている。一方のブリッジ回路22Aは、磁気インピーダンス素子12Aと、3個の抵抗器24、25、および26とで構成されている。磁気インピーダンス素子12Aは、その磁性材料の長手方向の一端および他端でブリッジ回路22Aと接続されている。もう一方のブリッジ回路22Bの構成は、磁気インピーダンス素子12Bを磁気インピーダンス素子12Aの代わりに用いている点のみが、ブリッジ回路22Aと異なっている。
一方の磁気インピーダンス素子12Aの磁性材料の周囲には、バイアスコイル14が配置されている。このバイアスコイル14は、磁気インピーダンス素子12Aの磁性材料に交流バイアス磁界を印加するために設けてある。また、本実施形態では、バイアスコイル14は負帰還用の磁界を発生するためにも利用される。バイアスコイル14の一端に交流バイアス信号SG3が印加される。バイアスコイル14の他端はアースと接続されている。交流バイアス信号SG3の波形は基本的には三角波であるが、正弦波、矩形波でも良い。
また、バイアスコイル14が備わっているのは磁気インピーダンス素子12Aのみであり、もう一方の磁気インピーダンス素子12Bにはバイアスコイル14が備わっていない。つまり、一方の磁気インピーダンス素子12Aは交流バイアス磁界を印加した状態で動作し、もう一方の磁気インピーダンス素子12Bは交流バイアス磁界を印加しない状態で動作する。
磁気インピーダンス素子12A、および12Bは、1つの抵抗器としてブリッジ回路22A、および22Bにそれぞれ接続されている。本実施形態で採用している磁気インピーダンス素子12A、および12Bは、外部磁界が印加されない基準状態でインピーダンス(直流抵抗)が最大になる特性を有している。そして、磁気インピーダンス素子12A、12Bのインピーダンスが最大になった状態でブリッジ回路22A、22Bが平衡状態になるように、抵抗器24、25、および26の各抵抗値を選定してある。
各ブリッジ回路22A、22Bの入力側の端子22a、および22bは、それぞれ発振回路21の出力、およびアースと接続してある。発振回路21は、例えば数十[MHz]程度の周波数の高周波電圧を信号SG1として各ブリッジ回路22A、22Bに供給する。信号SG1の波形は矩形波である。
ブリッジ回路22Aの出力側の端子22c、および22dは、それぞれ信号処理部23Aの入力端子と接続されている。また、ブリッジ回路22Bの出力側の端子22c、および22dは、それぞれ信号処理部23Bの入力端子と接続されている。
2つの信号処理部23A、23Bの内部構成は同一である。これらの内部には、2つのピークホールド回路(P/H)27および28と、計装増幅器(INS)29とがそれぞれ備わっている。
2つの信号処理部23A、23Bの内部構成は同一である。これらの内部には、2つのピークホールド回路(P/H)27および28と、計装増幅器(INS)29とがそれぞれ備わっている。
ピークホールド回路27は、入力に接続された各ブリッジ回路22A、22Bの端子22cに現れる電位のピーク電位を検出して保持する。ピークホールド回路28は、入力に接続された各ブリッジ回路22A、22Bの端子22dに現れる電位のピーク電位を検出して保持する。計装増幅器29は、ピークホールド回路27が保持するピーク電位と、ピークホールド回路28が保持するピーク電位との電位差を増幅し、信号SG2又はSG2Bとして出力する。
一方、検出ユニット30の内部には、増幅器(AMP)31、スイッチ回路(SW)32、振幅検出回路33、位相検出回路34、マイクロコンピュータ(マイコン)35、スイッチ回路36、および増幅器37が備わっている。
また、振幅検出回路33は、ローパスフィルタ(LPF)33a、アナログスイッチ33c、およびピークホールド回路33dを備えている。位相検出回路34は、微分回路34a、増幅器34b、微分回路34c、およびコンパレータ(COMP)34dを備えている。
マイクロコンピュータ35は、予め組み込まれているプログラムを実行することにより、磁界検出センサ200の機能を実現するための各種制御を行う。例えば、振幅検出回路33が出力する振幅検出信号SG9、位相検出回路34が出力する位相差検出信号SG5、および信号処理部23Bの出力信号SG2B、に基づいて検出された外部磁界の大きさおよび方向を把握し、その情報をデジタル出力信号SG10として出力する。また、三角波の交流バイアス波形出力信号SG11、および正弦波の交流バイアス波形出力信号SG12をマイクロコンピュータ35が出力する。
交流バイアス波形出力信号SG11、およびSG12は、スイッチ回路36および増幅器37を経由して駆動ユニット20に印加され、交流バイアス信号SG3としてバイアスコイル14に供給される。
<磁気インピーダンス素子12の構成例>
2種類の磁気インピーダンス素子12の各々の構成例を図2(a)および図2(b)にそれぞれ示す。図2(a)に示すように、磁気インピーダンス素子12は、非磁性基板12aと、磁性薄膜(磁性膜)12bと、電極12c、12dとにより構成されている。
2種類の磁気インピーダンス素子12の各々の構成例を図2(a)および図2(b)にそれぞれ示す。図2(a)に示すように、磁気インピーダンス素子12は、非磁性基板12aと、磁性薄膜(磁性膜)12bと、電極12c、12dとにより構成されている。
非磁性基板12aは、非磁性体から構成される基板であって、プリント基板100に載置されている。この非磁性基板12aは、チタン酸カルシウム、酸化物ガラス、チタニア、アルミナ等によって構成されており、本実施形態では略直方体に構成されている。
磁性薄膜12bは、高透磁率金属磁性膜によって構成されており、図2(a)に示すように、非磁性基板12aの表面のうち、プリント基板100が設けられる面の反対面において平面視してミアンダ形状(つづら折れ形状)となるように形成されている。より詳細に、この磁性薄膜12bは、矩形波形状における立ち上り及び立ち下り方向が、略直方体をなす非磁性基板12aの長手方向に伸びている。
また、磁性薄膜12bは、その磁化容易軸方向が膜面内で磁性薄膜12bの長手方向と同方向となるように磁気異方性がつけられており、全体として非磁性基板12aの長手方向と磁化容易軸方向とが同方向となるようにされている。
電極12c,12dは、非磁性基板12aの表面、且つ、磁性薄膜12bの両端に設けられており、プリント基板100上の電極100a,100bとボンディングワイヤにて接続されるものである。したがって、プリント基板100上の電極100a,100bがそれぞれ図1に示したブリッジ回路22の端子22a,22cと接続される。
さらに、図2(a)に示すように、プリント基板100は磁気インピーダンス素子12の幅方向の両側に、磁気インピーダンス素子12と間隔を開けて、切欠き部100cを備えている。切欠き部100cは、プリント基板100の一端からプリント基板100の中央付近まで伸びている。
また、バイアスコイル14は、プリント基板100の切欠き部100cを介して、磁気インピーダンス素子12の周囲に巻きまわされている。このため、バイアスコイル14のコイル軸方向は、非磁性基板12aの長手方向と同方向となり、当該磁気インピーダンス素子12の長手方向が磁界の検出方向とされる。さらに、上記したように、非磁性基板12aの長手方向と磁化容易軸方向とが同方向となるようにされていることから、磁性薄膜12bの磁化容易軸は磁界の検出方向と同方向となるように磁気異方性がつけられていることとなる。
また、図2(b)に示すように、磁性薄膜12bは、非磁性基板12aの裏面、すなわちプリント基板100が設けられる側の面に形成されてもよい。この場合、電極12c,12dは、非磁性基板12aの裏面、且つ、磁性薄膜12bの両端に設けられることとなる。また、プリント基板100上の電極100a,100bについても、非磁性基板12aの裏面側に設けられている。図1に示した磁界検出センサ200の磁気インピーダンス素子12の構成としては、図2(a)、図2(b)のいずれの構成を採用してもよい。
図1に示した磁界検出センサ200が採用している一方の磁気インピーダンス素子12Aは、図2(a)、図2(b)の磁気インピーダンス素子12と同様にバイアスコイル14を備えている。しかし、もう一方の磁気インピーダンス素子12Bには不要であるためバイアスコイル14が存在しない。
<磁気インピーダンス素子12の磁気検出特性>
磁気インピーダンス素子12の磁気検出特性の具体例を図3に示す。図3において、横軸は外部磁界の大きさおよび方向H[Oe]を表し、縦軸は磁性薄膜12bの長手方向の両端の間のインピーダンス(直流抵抗)[Ω]を表す。
磁気インピーダンス素子12の磁気検出特性の具体例を図3に示す。図3において、横軸は外部磁界の大きさおよび方向H[Oe]を表し、縦軸は磁性薄膜12bの長手方向の両端の間のインピーダンス(直流抵抗)[Ω]を表す。
つまり、磁気インピーダンス素子12のインピーダンスは、図3に示すように外部磁界の大きさがゼロの状態で最大になり、正方向または逆方向の外部磁界が印加されると外部磁界の大きさに比例するようにインピーダンスが減少するので、ピラミッドのような形状になる。したがって、磁気インピーダンス素子12、12A、12Bの特性は、特許文献1、特許文献2に示されたようなM字形状の一般的な磁気インピーダンス素子とは大きく異なる。
このようなピラミッド型の特性を有する磁気インピーダンス素子12、12A、12Bを採用することにより、インピーダンスが極値(この場合はピーク値)になる基準点の近傍であっても、図3に示すように外部磁界の変化に対するインピーダンス変化の傾きが十分に大きくなる。そのため、前記基準点からずれた位置に動作点をシフトすることなく高感度で外部磁界を検出可能であり、大きなバイアス電流を流す必要がない。
<配置形態、感磁軸、外部地場の方向>
複数の磁気インピーダンス素子12A、12Bの配置形態、感磁軸、および外部地場の方向の例を図4に示す。
複数の磁気インピーダンス素子12A、12Bの配置形態、感磁軸、および外部地場の方向の例を図4に示す。
図1に示した磁界検出センサ200に備わっている2個の磁気インピーダンス素子12A、および12Bは、例えば図4に示すように、互いに接近した状態で、同じ軸(Y)の方向に並べて配置される。また、磁気インピーダンス素子12A、12Bの磁性薄膜12bの長手方向が同じ向きになるように図4のように並べて配置される。
したがって、図4に示した例では、2個の磁気インピーダンス素子12A、12Bの感磁軸がいずれもX軸と平行な向きになる。そのため、X軸の正方向および負方向の外部磁界により、磁気インピーダンス素子12A、12Bのインピーダンスは図3に示したように変化する。
<一方の磁気インピーダンス素子12Aを使用する場合の基本的な動作原理>
磁気インピーダンス素子12Aにおける入力磁界と出力信号との相関関係の例を図5に示す。図5において、インピーダンス特性41のグラフの横軸は磁気インピーダンス素子12Aに加わる入力磁界の大きさおよび方向H[A/m]を表し、縦軸は磁気インピーダンス素子12Aの磁性薄膜12bにおける長手方向両端間のインピーダンスZ(交流抵抗値)[Ω]を表す。
磁気インピーダンス素子12Aにおける入力磁界と出力信号との相関関係の例を図5に示す。図5において、インピーダンス特性41のグラフの横軸は磁気インピーダンス素子12Aに加わる入力磁界の大きさおよび方向H[A/m]を表し、縦軸は磁気インピーダンス素子12Aの磁性薄膜12bにおける長手方向両端間のインピーダンスZ(交流抵抗値)[Ω]を表す。
なお、図1に示したもう一方の磁気インピーダンス素子12Bを使用する場合には、交流バイアスを印加しないので、図3に示したようなインピーダンスの変化をそのまま電圧に変換した信号SG2Bを利用してマイクロコンピュータ35が外部磁界の大きさを検出できる。
図5に示すように、インピーダンス特性41の基準点41rを中心として動作するように、バイアスコイル14に流れる電流よって交流バイアス磁界42が磁性薄膜12bに印加される。図5の例では振幅Vpの大きさで波形が三角波の交流バイアス磁界42を印加する場合を想定している。したがって、基準点41rを中心としてプラス方向およびマイナス方向に、Vpの振幅で交流バイアス磁界42の方向が交互に変化する。
そして、この交流バイアス磁界42の他に、検出対象の外部磁界が磁性薄膜12bに印加される。したがって、図5に示すように外部磁界と交流バイアス磁界の和42P、42N、42N2等が磁性薄膜12bに印加される。つまり、外部磁場がプラス方向の場合には交流バイアス磁界42の波形を外部磁場の大きさだけプラス方向にシフトした波形が外部磁界と交流バイアス磁界の和42Pとして磁性薄膜12bに印加される。外部磁場がマイナス方向の場合には交流バイアス磁界42の波形を外部磁場の大きさだけマイナス方向にシフトした波形が外部磁界と交流バイアス磁界の和42N、42N2として磁性薄膜12bに印加される。
そして、磁性薄膜12bに印加される磁界、すなわち交流バイアス磁界42、外部磁界と交流バイアス磁界の和42P、42N、42N2と、インピーダンス特性41とに従い、インピーダンスZが変化する。このインピーダンスZの変化を、例えば図1に示したブリッジ回路22Aを用いて、センサ出力信号43、43P、43N、43N2として取り出すことができる。
図5において、センサ出力信号43、43P、43N、および43N2は、それぞれ交流バイアス磁界42、外部磁界と交流バイアス磁界の和42P、42N、および42N2に対応する。つまり、交流バイアス磁界42の変化と外部磁場とに応じて、センサ出力信号43、43P、43N、43N2の状態が定まる。また、図5に示したセンサ出力信号43、43P、43N、43N2において、縦方向は信号の電位および振幅を表し、横方向は時間tの変化を表している。
外部磁場がゼロの場合には、センサ出力信号43が出力される。つまり、基準点41rの抵抗値に対応する電位Vrと、この点から振幅Vpに対応する電位差だけずれた電位V1までの間で交流バイアス磁界42の変化に伴って変化するようなセンサ出力信号43が得られる。
また、プラス方向の外部磁場が印加された場合には、基準点41rの電位Vrから外部磁場の大きさだけシフトした電位VrPを中心として、振幅Vpに対応する電位差だけ上下にずれた電位までの間で、交流バイアス磁界42の変化に伴って変化するようなセンサ出力信号43Pが得られる。また、マイナス方向の外部磁場が印加された場合には、基準点41rの電位Vrから外部磁場の大きさだけシフトした電位VrNを中心として、振幅Vpに対応する電位差だけ上下にずれた電位までの間で、交流バイアス磁界42の変化に伴って変化するようなセンサ出力信号43Nが得られる。
図5に示すように、センサ出力信号43、43P、43Nの間には、外部磁場の大きさおよび方向の違いに応じた変化が現れる。したがって、このセンサ出力信号43P、43Nに基づいて、外部磁場の大きさおよび方向を特定することが可能である。
また、外部磁場の大きさが交流バイアス磁界42の振幅Vpよりも小さい場合には、磁界42N2の変化に対して、センサ出力信号43N2が得られる。この場合、磁界42N2が基準点(磁界がゼロ)41rを通過するタイミングで、センサ出力信号43N2の電圧の変化の方向が切り替わる頂点Px1、Px2が現れる。これらの頂点Px1、Px2のタイミングは、外部磁界の大きさに応じて変化する。したがって、例えば頂点Px1、Px2の位相差を計測することにより、外部磁界の大きさを算出可能である。
<磁界検出センサ200内部の主要な信号の変化例>
磁界検出センサ200内部の主要な信号の変化例を図6に示す。図6において、各信号の横軸は共通の時間tを表し、縦軸は電位を表している。
磁界検出センサ200内部の主要な信号の変化例を図6に示す。図6において、各信号の横軸は共通の時間tを表し、縦軸は電位を表している。
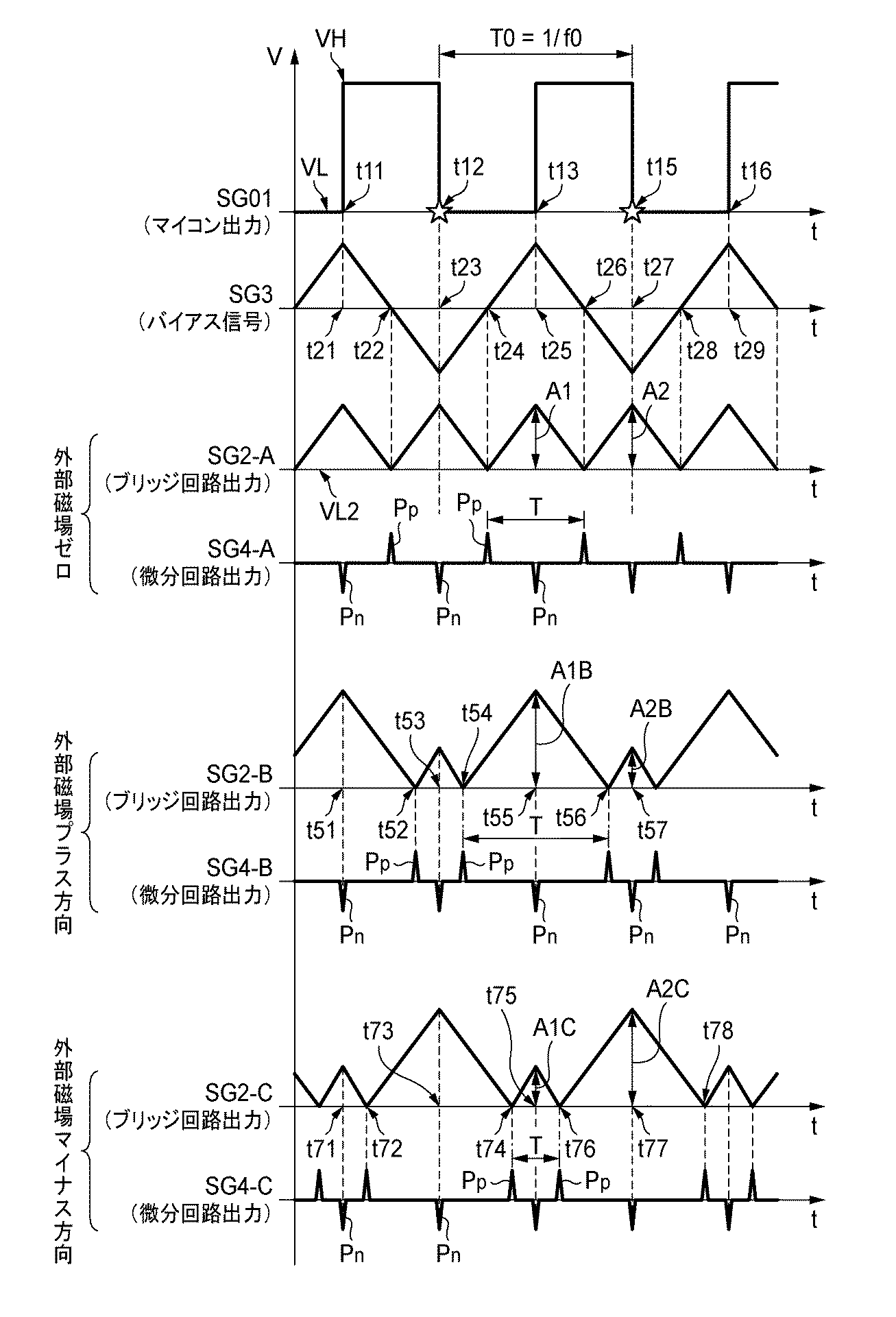
図6に示すように、バイアスコイル14に印加されるバイアス信号SG3の波形は三角波である。このバイアス信号SG3は、マイクロコンピュータ35が出力する矩形波の信号SG01に基づいて生成される。
例えば、時刻t11で信号SG01が低電位VLから高電位VHに立ち上がると、バイアス信号SG3の電位は一定の傾きで下降を開始し、時刻t12で信号SG01が高電位VHから低電位VLに立ち下がるまでその状態が継続する。また、この時刻t12でバイアス信号SG3の電位は一定の傾きで上昇を開始し、時刻t13で信号SG01が低電位VLから高電位VHに立ち上がるまでその状態が継続する。このような動作の繰り返しによって、三角波の波形が生成される。
図6中に示した各信号SG2−A、SG2−B、SG2−Cは、ブリッジ回路22Aの出力、例えば図1中の信号処理部23Aが出力する信号SG2の波形に相当する。また、各信号SG4−A、SG4−B、SG4−Cは、微分回路の出力、例えば図1中の微分回路34cが出力する信号SG4に相当する。また、各信号SG2−AおよびSG4−Aは外部磁場がゼロの状態を表し、各信号SG2−BおよびSG4−Bは、外部磁場がプラス方向の場合の例を表し、各信号SG2−CおよびSG4−Cは、外部磁場がマイナス方向の場合の例を表す。
図6中に示した信号SG2−Aの波形は、図5中に示したセンサ出力信号43の波形と同じように変化する。すなわち、バイアス信号SG3の電位がゼロになる各時刻t22、t24、・・・で基準点41rに対応する低電位VL2になり、それ以外の時刻ではバイアス信号SG3の電位変化に伴って、VL2よりも高い電位に変化する。したがって、信号SG2−Aの波形は三角波になるが、その周期はバイアス信号SG3の周期の半分になる。
<外部磁場がゼロの場合>
また、信号SG2−Aにおいて、振幅A1とA2は同じである。ここで、振幅A1はバイアス信号SG3の電位が上昇から下降に変化する各頂点の時刻t21、t25、t29、・・・における振幅を表し、振幅A2はバイアス信号SG3の電位が下降から上昇に変化する各頂点の時刻t23、t27、・・・における振幅を表す。
また、信号SG2−Aにおいて、振幅A1とA2は同じである。ここで、振幅A1はバイアス信号SG3の電位が上昇から下降に変化する各頂点の時刻t21、t25、t29、・・・における振幅を表し、振幅A2はバイアス信号SG3の電位が下降から上昇に変化する各頂点の時刻t23、t27、・・・における振幅を表す。
一方、図6中に示した信号SG4−Aの波形においては、信号SG2−Aの電位が上昇から下降に変化する各頂点の時刻t21、t23、t25、・・・において、時間幅の小さいマイナス電位方向のパルスPnが現れる。また、信号SG4−Aの波形においては、信号SG2−Aの電位が下降から上昇に変化する各頂点の時刻t22、t24、t26、・・・において、時間幅の小さいプラス電位方向のパルスPpが現れる。
また、この信号SG4−Aの波形において、例えば互いに隣接する2つのプラス電位方向のパルスPp間の時間周期Tは、信号SG01の1周期T0の半分の長さであり一定である。マイナス電位方向のパルスPnについても同様である。なお、信号SG01の周波数がf0の場合には、周期T0はその逆数、すなわち(1/f0)で表される。
<プラス方向の外部磁場が印加された場合>
一方、信号SG2−Bにおいては、振幅A1BとA2Bとが異なっている。ここで、振幅A1Bは、信号SG01の1周期T0の間で、バイアス信号SG3の電位が上昇から下降に変化する頂点の時刻t55における振幅を表し、振幅A2Bはバイアス信号SG3の電位が下降から上昇に変化する頂点の時刻t57における振幅を表す。
一方、信号SG2−Bにおいては、振幅A1BとA2Bとが異なっている。ここで、振幅A1Bは、信号SG01の1周期T0の間で、バイアス信号SG3の電位が上昇から下降に変化する頂点の時刻t55における振幅を表し、振幅A2Bはバイアス信号SG3の電位が下降から上昇に変化する頂点の時刻t57における振幅を表す。
つまり、信号SG2−Bが磁性薄膜12bに印加されるプラス方向の外部磁場の影響を受けるので、振幅A1Bは外部磁場がゼロの場合の前記振幅A1よりも大きくなり、振幅A2Bは外部磁場がゼロの場合の前記振幅A2よりも小さくなる。つまり、振幅A1B、A2Bの変化は外部磁場の大きさおよび方向を反映しているので、振幅A1B、A2Bの少なくとも一方を利用することにより、外部磁場の大きさおよび方向を算出することが可能である。
一方、図6中に示した信号SG4−Bの波形においては、信号SG2−Bの電位が上昇から下降に変化する各頂点の時刻t51、t53、t55、・・・において、時間幅の小さいマイナス電位方向のパルスPnが現れる。また、信号SG4−Bの波形においては、信号SG2−Bの電位が下降から上昇に変化する各頂点の時刻t52、t54、t56、・・・において、時間幅の小さいプラス電位方向のパルスPpが現れる。
また、この信号SG4−Bの波形におけるプラス電位方向のパルスPpのタイミングは、信号SG4−Aの場合と比べてずれている。つまり、外部磁場の影響が、パルスPpの位相、すなわち磁気インピーダンス素子12Aのインピーダンス特性における基準点41rを通過するタイミングの変化に反映されている。例えば、信号SG4−Bの電位が上昇を開始する時刻t54のパルスPpから、次に信号SG4−Bの電位が上昇を開始する時刻t56のパルスPpまでのパルスPp間の時間周期Tは、信号SG4−Aの場合よりも大きくなっている。
つまり、プラス電位方向のパルスPp間の時間周期Tは、外部磁場の影響で生じた各パルスPpの位相差を反映している。したがって、各パルスPpの位相差を検出するか、または時間周期Tを検出することにより、外部磁場の大きさおよび方向を算出できる。
<マイナス方向の外部磁場が印加された場合>
一方、信号SG2−Cにおいては、振幅A1CとA2Cとが異なっている。ここで、振幅A1Cは、信号SG01の1周期T0の間で、バイアス信号SG3の電位が上昇から下降に変化する頂点の時刻75における振幅を表し、振幅A2Bはバイアス信号SG3の電位が下降から上昇に変化する頂点の時刻t77における振幅を表す。
<マイナス方向の外部磁場が印加された場合>
一方、信号SG2−Cにおいては、振幅A1CとA2Cとが異なっている。ここで、振幅A1Cは、信号SG01の1周期T0の間で、バイアス信号SG3の電位が上昇から下降に変化する頂点の時刻75における振幅を表し、振幅A2Bはバイアス信号SG3の電位が下降から上昇に変化する頂点の時刻t77における振幅を表す。
つまり、信号SG2−Cが磁性薄膜12bに印加されるマイナス方向の外部磁場の影響を受けるので、振幅A1Cは外部磁場がゼロの場合の前記振幅A1よりも小さくなり、振幅A2Cは外部磁場がゼロの場合の前記振幅A2よりも大きくなる。つまり、振幅A1C、A2Cの変化は外部磁場の大きさおよび方向を反映しているので、振幅A1C、A2Cの少なくとも一方を利用することにより、外部磁場の大きさおよび方向を算出することが可能である。
一方、図6中に示した信号SG4−Cの波形においては、信号SG2−Cの電位が上昇から下降に変化する各頂点の時刻t71、t73、t75、・・・において、時間幅の小さいマイナス電位方向のパルスPnが現れる。また、信号SG4−Cの波形においては、信号SG2−Cの電位が下降から上昇に変化する各頂点の時刻t72、t74、t76、・・・において、時間幅の小さいプラス電位方向のパルスPpが現れる。
また、この信号SG4−Cの波形におけるプラス電位方向のパルスPpのタイミングは、信号SG4−Aの場合と比べてずれている。つまり、外部磁場の影響が、パルスPpの位相、すなわち磁気インピーダンス素子12Aのインピーダンス特性における基準点41rを通過するタイミングの変化に反映されている。例えば、信号SG4−Cの電位が上昇を開始する時刻t74のパルスPpから、次に信号SG4−Cの電位が上昇を開始する時刻t76のパルスPpまでのパルスPp間の時間周期Tは、信号SG4−Aの場合よりも小さくなっている。
つまり、プラス電位方向のパルスPp間の時間周期Tは、外部磁場の影響で生じた各パルスPpの位相差を反映している。したがって、各パルスPpの位相差を検出するか、または時間周期Tを検出することにより、外部磁場の大きさおよび方向を算出できる。
<外部磁界が大きい場合の主要な信号の変化例>
外部磁界が大きい場合の主要な信号の変化例を図7に示す。図7において、各信号の横軸は共通の時間tを表し、縦軸は電位を表している。また、図7中の各信号SG01、SG3、SG2−A、およびSG4−Aは、図6の内容と同一である。
外部磁界が大きい場合の主要な信号の変化例を図7に示す。図7において、各信号の横軸は共通の時間tを表し、縦軸は電位を表している。また、図7中の各信号SG01、SG3、SG2−A、およびSG4−Aは、図6の内容と同一である。
図7中に示した各信号SG2−A、SG2−D、SG2−Eは、ブリッジ回路22Aの出力、例えば図1中の信号処理部23Aが出力する信号SG2の波形に相当する。また、各信号SG4−A、SG4−D、SG4−Eは、微分回路の出力、例えば図1中の微分回路34cが出力する信号SG4に相当する。
また、各信号SG2−AおよびSG4−Aは外部磁場がゼロの状態を表している。また、各信号SG2−DおよびSG4−Dは、外部磁場がプラス方向で、且つ外部磁界の大きさが交流バイアスの振幅Vpよりも大きい場合の例を表している。また、各信号SG2−EおよびSG4−Eは、外部磁場がマイナス方向で、且つ外部磁界の大きさが交流バイアスの振幅Vpよりも大きい場合の例を表している。
図7に示した例では、外部磁界が振幅Vpよりも大きい影響で、信号SG2−DおよびSG2−Eの各々の波形が、バイアス信号SG3とほぼ同じになっている。そのため、信号SG4−Dに現れるプラス方向の各パルスPpの位相は一定になり、隣接する2つのパルスPpの間の時間周期Tも一定になる。同様に、信号SG4−Eにおいても、プラス方向の各パルスPpの位相が一定になり、隣接する2つのパルスPpの間の時間周期Tも一定になる。
したがって、図7に示したような状況においては、信号SG4−D、SG4−Eにおけるパルスの位相や周期から、外部磁場を検知することができない。つまり、図6に示した信号SG4−B、SG4−CのようにパルスPpの位相の変化を検出できるのは、外部磁界の大きさが交流バイアスの振幅Vpよりも小さい場合のみに限られる。
しかし、図7に示した状況においても、信号SG2−Dの振幅A1D、A2Dには、外部磁界の大きさの影響が現れているので、これらの振幅A1D、A2Dの少なくとも一方の情報に基づいて、外部磁界の大きさや方向を算出することが可能である。同様に、信号SG2−Eの振幅A1E、A2Eには、外部磁界の大きさの影響が現れているので、これらの振幅A1E、A2Eの少なくとも一方の情報に基づいて、外部磁界の大きさや方向を算出することが可能である。
<検出ユニット30の動作>
図1に示した検出ユニット30内の増幅器31の入力には、駆動ユニット20の計装増幅器29から出力される信号SG2が印加される。この信号SG2は、外部磁場がゼロの場合には図6に示した信号SG2−Aのような三角波の波形である。また、外部磁場がプラス方向の場合、およびマイナス方向の場合には、それぞれ図6に示した信号SG2−B、およびSG2−Cのような波形になる。また、外部磁界の大きさがバイアス信号の振幅Vp以上になっ場合には、図7に示した信号SG2−D、およびSG2−Eのような波形になる。この信号SG2は、増幅器31で増幅され、スイッチ回路32の切替により、振幅検出回路33および位相検出回路34のいずれか又は、振幅検出回路33および位相検出回路34の両方の入力に選択的に印加される。
図1に示した検出ユニット30内の増幅器31の入力には、駆動ユニット20の計装増幅器29から出力される信号SG2が印加される。この信号SG2は、外部磁場がゼロの場合には図6に示した信号SG2−Aのような三角波の波形である。また、外部磁場がプラス方向の場合、およびマイナス方向の場合には、それぞれ図6に示した信号SG2−B、およびSG2−Cのような波形になる。また、外部磁界の大きさがバイアス信号の振幅Vp以上になっ場合には、図7に示した信号SG2−D、およびSG2−Eのような波形になる。この信号SG2は、増幅器31で増幅され、スイッチ回路32の切替により、振幅検出回路33および位相検出回路34のいずれか又は、振幅検出回路33および位相検出回路34の両方の入力に選択的に印加される。
<振幅検出回路33の動作>
振幅検出回路33においては、図6の信号SG2−A、SG2−B、SG−2Cと同等の波形の信号がローパスフィルタ(LPF)33aの入力に印加される。ローパスフィルタ33aは、信号の積分動作を行い、周波数の高い成分を除去する。したがって、例えば波形が三角波の信号が入力された場合には、正弦波に近い波形の信号SG6がローパスフィルタ33aから出力される。
振幅検出回路33においては、図6の信号SG2−A、SG2−B、SG−2Cと同等の波形の信号がローパスフィルタ(LPF)33aの入力に印加される。ローパスフィルタ33aは、信号の積分動作を行い、周波数の高い成分を除去する。したがって、例えば波形が三角波の信号が入力された場合には、正弦波に近い波形の信号SG6がローパスフィルタ33aから出力される。
アナログスイッチ33cは、マイクロコンピュータ35のバイアス信号SG3から生成されるオンオフ信号SG8により制御され、ローパスフィルタ33aから出力される信号SG6は、アナログスイッチ33cを通ってピークホールド回路33dに入力される。
ピークホールド回路33dは、アナログスイッチ33cから出力される信号SG7におけるピーク電位を検出し保持することができる。したがって、例えば図6に示した各信号SG2−B、SG2−Cの振幅A1B、A2B、A1C、A2Cなどの各々に相当する電圧を、振幅検出信号SG9として出力することができる。
<位相検出回路34の動作>
位相検出回路34においては、図6の信号SG2−A、SG2−B、SG−2Cと同等の波形の信号が、スイッチ回路32の出力から微分回路34aに入力される。位相検出回路34は、この入力信号を微分回路34aで微分処理した後、増幅器34bで増幅し、次の微分回路34cで再び微分処理して信号SG4を生成する。
位相検出回路34においては、図6の信号SG2−A、SG2−B、SG−2Cと同等の波形の信号が、スイッチ回路32の出力から微分回路34aに入力される。位相検出回路34は、この入力信号を微分回路34aで微分処理した後、増幅器34bで増幅し、次の微分回路34cで再び微分処理して信号SG4を生成する。
したがって、図6に示した信号SG4−B、SG4−Cのように、信号SG2−B、SG−2Cの電位変化が上昇から下降に切り替わる各頂点のタイミングで、マイナス方向のパルスPnが発生する。また、信号SG2−B、SG−2Cの電位変化が下降から上昇に切り替わる各頂点のタイミング(基準点41rを通過するタイミング)で、プラス方向のパルスPpが発生する。
コンパレータ(COMP)34dは、微分回路34cが出力する信号SG4の電位を閾値と比較した結果を二値信号として出力する。この二値信号は、プラス方向の各パルスPpのタイミングを正確に表す位相差検出信号SG5である。
<マイクロコンピュータ35の基本動作>
マイクロコンピュータ35は、振幅検出回路33から出力される振幅検出信号SG9の電圧を計測することにより、例えば図6に示した振幅A1B、A2Bのいずれか一方、または両方を把握し、その結果に基づいて外部磁界の大きさおよび方向を算出することができる。また、マイクロコンピュータ35は、位相検出回路34から出力される位相差検出信号SG5のタイミングに基づいて、例えば図6に示した各時間周期Tの長さを計測し、その結果に基づいて外部磁界の大きさおよび方向を算出することができる。
マイクロコンピュータ35は、振幅検出回路33から出力される振幅検出信号SG9の電圧を計測することにより、例えば図6に示した振幅A1B、A2Bのいずれか一方、または両方を把握し、その結果に基づいて外部磁界の大きさおよび方向を算出することができる。また、マイクロコンピュータ35は、位相検出回路34から出力される位相差検出信号SG5のタイミングに基づいて、例えば図6に示した各時間周期Tの長さを計測し、その結果に基づいて外部磁界の大きさおよび方向を算出することができる。
更に、マイクロコンピュータ35は、信号処理部23Bが出力する信号SG2Bの電圧をサンプリングしてデジタル信号に変換し、電圧の値を把握できる。この電圧は、図3に示したようなインピーダンスの変化に対応するので、電圧の値から外部磁界の大きさを算出することができる。
<外部磁界と位相検出回路34の動作との関係>
外部磁界と位相検出回路34の動作との関係の例を図8に示す。図8に示した特性C71は、検出ユニット30内の位相検出回路34における検出特性の例を表している。また、図7において横軸は外部磁界H[A/m]の大きさおよび方向を表し、縦軸は位相検出回路34の信号SG4、SG5におけるプラス方向のパルスPpの時間周期T(図6、図7参照)の長さを表している。
外部磁界と位相検出回路34の動作との関係の例を図8に示す。図8に示した特性C71は、検出ユニット30内の位相検出回路34における検出特性の例を表している。また、図7において横軸は外部磁界H[A/m]の大きさおよび方向を表し、縦軸は位相検出回路34の信号SG4、SG5におけるプラス方向のパルスPpの時間周期T(図6、図7参照)の長さを表している。
図8に示すように、特性C71においては、外部磁界Hがゼロの状態で、検出される時間周期Tが「(1/(2×f0)」になる。周波数f0は、信号SG01の基本周波数である。また、外部磁界Hが「−Vp<H<+Vp」の範囲内では、外部磁界Hの大きさの変化に比例して検出される時間周期Tが直線的に増大する。「Vp」は交流バイアス磁界の振幅である。また、外部磁界Hが「−Vp」以下の範囲、および外部磁界Hが「Vp」以上の範囲では、検出される時間周期Tは一定値、すなわち「T=(1/f0)」になる。
つまり、外部磁界Hが「−Vp<H<+Vp」の範囲内であれば、特性C71に対応する計算式と、位相検出回路34が出力する位相差検出信号SG5の時間周期Tとに基づいて、外部磁界Hの大きさおよび方向をマイクロコンピュータ35が算出することができる。
外部磁界Hの方向については、図8に示した特性C71のように、検出される時間周期Tが「(1/(2×f0)」よりも大きい場合はプラス方向であり、検出される時間周期Tが「(1/(2×f0)」よりも小さい場合はマイナス方向であると判断できる。
しかし、外部磁界Hが「−Vp」以下の範囲、および外部磁界Hが「+Vp」以上の範囲では、検出される時間周期Tから外部磁界Hを算出することはできない。そこで、外部磁界Hが「−Vp」以下の範囲、および外部磁界Hが「+Vp」以上の範囲では、振幅検出回路33が出力する振幅検出信号SG9を利用して外部磁界Hの大きさおよび方向をマイクロコンピュータ35が算出する。
<外部磁界と振幅検出回路33が検出する振幅との関係>
外部磁界と振幅検出回路33が検出する振幅との関係の例を図9に示す。図9に示した特性C81、C82は振幅検出回路33の検出特性を表し、特性C81、およびC82は、それぞれ振幅検出回路33が出力する振幅検出信号SG9における図6中の振幅A1およびA2に対応する。
外部磁界と振幅検出回路33が検出する振幅との関係の例を図9に示す。図9に示した特性C81、C82は振幅検出回路33の検出特性を表し、特性C81、およびC82は、それぞれ振幅検出回路33が出力する振幅検出信号SG9における図6中の振幅A1およびA2に対応する。
すなわち、振幅A1は信号SG01の立ち上がりのタイミングにおける信号SG2の振幅の電圧[V]であり、振幅A2は信号SG01の立ち下がりのタイミングにおける信号SG2の振幅の電圧である。図9において、横軸は横軸は外部磁界H[A/m]の大きさおよび方向を表し、縦軸は振幅A1、A2の電圧を表す。
図9に示したように、特性C81においては、外部磁界Hの大きさがマイナス側で「2Vp」の場合に振幅A1の電圧が最小になり、この基準点から外部磁界Hの大きさが離れるにつれて振幅A1の電圧が増大する。
また、特性C82においては、外部磁界Hの大きさがプラス側で「2Vp」の場合に振幅A2の電圧が最小になり、この基準点から外部磁界Hの大きさが離れるにつれて振幅A2の電圧が増大する。
したがって、例えば図9に示した特性C81、C82の少なくとも一方の情報と、振幅検出回路33が出力する振幅検出信号SG9における振幅A1、A2の電圧とに基づいて、外部磁界Hの大きさを算出することができる。また、特性C81、C82が互いに異なっているので、例えば振幅A1、A2の電圧の大小関係を比較することにより、外部磁界Hの方向(プラス/マイナス)を特定できる。
<外部磁界と信号SG2Bとの関係>
外部磁界と信号SG2Bとの関係の例を図10に示す。図10に示す検出特性C101において、横軸は磁界の大きさおよび方向H[A/m]を表し、縦軸は信号SG2Bの電圧[V]を表している。
外部磁界と信号SG2Bとの関係の例を図10に示す。図10に示す検出特性C101において、横軸は磁界の大きさおよび方向H[A/m]を表し、縦軸は信号SG2Bの電圧[V]を表している。
すなわち、磁気インピーダンス素子12Bの磁性薄膜12bにおけるインピーダンス(直流抵抗)が図3のように磁界に応じて変化するので、ブリッジ回路22Bの出力端子22c、22d間の電圧は、磁界Hがゼロの時に最小になり、磁界Hが加わるとその大きさに応じて急激に増大する。この電圧には磁界Hの方向の変化の影響は生じない。なお、発振回路21が出力する信号SG1の電圧が短い周期で変化するのでブリッジ回路22Bの実際の出力電圧も短い周期で変動する。しかし、信号処理部23B内のピークホールド回路27、28がピーク電位を保持するので、信号SG1が高電位の時の電圧のみが信号SG2Bに現れる。
<検出方法の違いと得意/不得意との関係>
図8、図9、図10に示された各検出特性C71、C81、C82、C101と、得意/不得意を表す各エリアAR111、AR112、AR113との関係を図11に示す。図11において、横軸は磁界H[A/m]を表し、縦軸は信号の電圧[V]を表す。
図8、図9、図10に示された各検出特性C71、C81、C82、C101と、得意/不得意を表す各エリアAR111、AR112、AR113との関係を図11に示す。図11において、横軸は磁界H[A/m]を表し、縦軸は信号の電圧[V]を表す。
すなわち、バイアスコイル14によって交流バイアス磁界が印加される磁気インピーダンス素子12Aの出力に相当する各検出特性C71、C81、C82については、外部磁界Hが比較的小さい状況で、外部磁界Hの変化を高感度で検知できる。また、位相差検出に基づく検出特性C71の場合には、外部磁界Hが交流バイアスの振幅Vpよりも大きくなると、外部磁界Hの変化を検知できない状態になる。
一方、交流バイアス磁界が印加されない磁気インピーダンス素子12Bの出力を直接読み取る場合に相当する検出特性C101を用いる場合には、外部磁界Hが小さい領域では電圧の変化の傾きが大きすぎるため、正確に外部磁界Hの大きさを検出することは難しい。しかし、外部磁界Hが大きい領域では、検出特性C101により外部磁界Hの大きさを高感度で検出することができる。
つまり、外部磁界Hが小さい場合のエリアAR113は、各検出特性C71、C81、C82の得意とする範囲であるが、検出特性C101の不得意な範囲も含まれている。また、外部磁界Hが大きい場合のエリアAR111、およびAR112は、検出特性C101の得意な範囲であるが、各検出特性C71、C81、C82の不得意な範囲も含まれている。
<磁界検出センサ200を使用する場合の具体例>
図1に示した磁界検出センサ200は、例えば方位センサ、トルクセンサ、回転角センサ、電流センサのような一般的な磁気検出装置として利用することが可能である。
図1に示した磁界検出センサ200は、例えば方位センサ、トルクセンサ、回転角センサ、電流センサのような一般的な磁気検出装置として利用することが可能である。
例えば、ワイヤハーネス上の被測定電線を流れる直流電流を検出対象とする電流センサとして磁界検出センサ200を使用する場合には、一般的な構成として、次に説明するような電流センサを構成することが想定される。
図示しないが、被測定電線の周囲を囲むように磁性体コアを配置し、この磁性体コアのギャップの箇所に磁界検出センサ200を配置する。この場合、被測定電線に流れる直流電流I[A]の大きさに比例して発生する磁界の大きさおよび方向H[A/m]を磁界検出センサ200で検出できる。つまり、磁界検出センサ200により被測定電線に流れる直流電流Iの大きさと方向を検出できる。
なお、例えば被測定電線が自動車に搭載されるワイヤハーネスの幹線の場合を想定すると、電流の最大値は数百アンペア程度になる。したがって、そのような用途に用いる電流センサについては、小さい電流から大きい電流まで広い範囲に亘り正確に計測できることが求められる。
そこで、例えば上記のような電流センサを構成する場合に、図1に示した磁界検出センサ200を採用し、図11に示した検出特性C71、C81、C82、C101のうち少なくとも2つを組み合わせることにより、検出結果を最適化する。
ここでは、具体例として、次の2種類の検出方法を組み合わせて使用する。
(1)図10に示した検出特性C101に相当する検出方法を用いて、検出した磁界Hに相当する電流Id[A]を求める。
(2)図9に示した検出特性C81、C82の差分、すなわち振幅(A1−A2)を利用する検出方法を用いて、検出した磁界Hに相当する電流Iac[A]を求める。
(1)図10に示した検出特性C101に相当する検出方法を用いて、検出した磁界Hに相当する電流Id[A]を求める。
(2)図9に示した検出特性C81、C82の差分、すなわち振幅(A1−A2)を利用する検出方法を用いて、検出した磁界Hに相当する電流Iac[A]を求める。
また、上記(1)、(2)を組み合わせて最適な計測結果を得るために、例えば以下の表1に示した2つの係数w1、w2を用いて重み付けを行い、次式により電流値I[A]を算出する。
I=w1×Id+w2×Iac ・・・(1)
I=w1×Id+w2×Iac ・・・(1)
上記表1に示した例では、計測対象の外部磁界が低い領域では2つの係数w1、w2に対して、それぞれ小さい重み、および大きい重みを割り当てる。また、計測対象の外部磁界が高い領域では2つの係数w1、w2に対して、それぞれ大きい重み、および小さい重みを割り当てる。
したがって、上記第(1)式を計算する際に、例えば図11に示したエリアAR113では検出特性C101を反映した電流Idの重みを小さくして、検出特性C81、C82の差分(A1−A2)を反映した電流Iacの重みを大きくすることができる。また、例えば図11に示したエリアAR111、AR112では検出特性C101を反映した電流Idの重みを大きくして、検出特性C81、C82の差分(A1−A2)を反映した電流Iacの重みを小さくすることができる。したがって、複数の検出方法の各々が得意とする領域で大きな重みが割り当てられることになり、広い範囲で電流値Iの検出誤差を減らすことが可能になる。
<検出特性の補正処理>
ところで、上記の重み付けなどによって複数種類の検出特性を使い分けるような状況においては、複数の検出特性を切り替える箇所等において不連続な点が生じたり非線形の箇所が生じやすくなり、計測結果に含まれる誤差が増大する。したがって、複数の検出特性を切り替えなどの影響により生じる誤差を減らすために、複数の検出特性の形状等を互いに近い状態に予め修正しておく必要がある。このような修正の具体例を以下に説明する。
ところで、上記の重み付けなどによって複数種類の検出特性を使い分けるような状況においては、複数の検出特性を切り替える箇所等において不連続な点が生じたり非線形の箇所が生じやすくなり、計測結果に含まれる誤差が増大する。したがって、複数の検出特性を切り替えなどの影響により生じる誤差を減らすために、複数の検出特性の形状等を互いに近い状態に予め修正しておく必要がある。このような修正の具体例を以下に説明する。
<初期状態の特性>
2種類の検出特性C121、C122の初期状態を並べて図12に示す。図12に示した検出特性C121は、磁気インピーダンス素子12Bの特性を反映した信号SG2Bから算出される。また、図12に示した検出特性C122は、磁気インピーダンス素子12Aの特性を反映した信号SG2に基づき振幅検出回路33で検出される振幅(A1−A2)から算出される。
2種類の検出特性C121、C122の初期状態を並べて図12に示す。図12に示した検出特性C121は、磁気インピーダンス素子12Bの特性を反映した信号SG2Bから算出される。また、図12に示した検出特性C122は、磁気インピーダンス素子12Aの特性を反映した信号SG2に基づき振幅検出回路33で検出される振幅(A1−A2)から算出される。
図12において、横軸は電流値(Current)I[A]を表し、左側の縦軸は検出特性C121の出力(OUTPUT)電圧[V]を表し、右側の縦軸は検出特性C122の出力電圧[V]を表す。
図12に示すように、2つの検出特性C121、C122は形状等が互いに大きく異なっている。また、検出特性C121においては、電流がゼロの点C121aで電圧が最小値になっているが、点C121aの電圧はゼロではない。また、検出特性C122においては、電流がゼロの近傍に特異点があり、電流のプラス側の領域を表す特性C122(P)の左端の特異点と、電流のマイナス側の領域を表す特性C122(N)の右端の特異点とが大きくずれ、不連続になっている。
<各特性の補正>
そこで、図12に示した2つの検出特性C121、C122に対して以下の補正処理を施す。
そこで、図12に示した2つの検出特性C121、C122に対して以下の補正処理を施す。
(1)検出特性C121において、電流のマイナス側の領域C121bに対して「−1」倍の係数を掛ける。
(2)検出特性C121において、最小値の点C121aの電圧を0[V]にシフトするためのオフセット電圧を、検出特性C121の全体に対して加算(又は減算)する。
(3)検出特性C122において、電流のプラス側の領域の特性C122(P)の左端の特異点の電圧を、0[V]にシフトするためのオフセット電圧を、特性C122(P)の全体に対して加算(又は減算)する。
(4)検出特性C122において、電流のマイナス側の領域の特性C122(N)の右端の特異点の電圧を、0[V]にシフトするためのオフセット電圧を、特性C122(N)の全体に対して加算(又は減算)する。
(2)検出特性C121において、最小値の点C121aの電圧を0[V]にシフトするためのオフセット電圧を、検出特性C121の全体に対して加算(又は減算)する。
(3)検出特性C122において、電流のプラス側の領域の特性C122(P)の左端の特異点の電圧を、0[V]にシフトするためのオフセット電圧を、特性C122(P)の全体に対して加算(又は減算)する。
(4)検出特性C122において、電流のマイナス側の領域の特性C122(N)の右端の特異点の電圧を、0[V]にシフトするためのオフセット電圧を、特性C122(N)の全体に対して加算(又は減算)する。
上記(1)〜(4)の補正処理の結果、図13に示した検出特性C131、C132が得られる。検出特性C131、およびC132は、それぞれ図12に示した検出特性C121、およびC122に相当する。図13において、横軸は電流値(Current)I[A]を表し、左側の縦軸は検出特性C131の出力(OUTPUT)電圧[V]を表し、右側の縦軸は検出特性C132の出力電圧[V]を表す。
次に、図13に示した一方の検出特性C132の全体に対して「−1」の係数を掛けて電圧の極性が反転するように補正する。この補正処理の結果として、図14に示した検出特性C141、C142が得られる。検出特性C141、およびC142は、それぞれ図13に示した検出特性C131、およびC132に相当する。図14において、横軸は電流値(Current)I[A]を表し、左側の縦軸は検出特性C141の出力(OUTPUT)電圧[V]を表し、右側の縦軸は検出特性C142の出力電圧[V]を表す。
図14に示された2種類の検出特性C141、C142は、互いに似た形状や特性を有していることが分かる。したがって、これらの検出特性C141、C142を使い分けることは比較的容易である。
<特性の重み付け>
また、前述の重み付けを行う場合には、例えば図15に示した特性C153のように、電流の大きさに応じて直線的に且つ連続的に変化する重みw3を用いてもよい。勿論、曲線的に変化する重みを用いてもよい。
また、前述の重み付けを行う場合には、例えば図15に示した特性C153のように、電流の大きさに応じて直線的に且つ連続的に変化する重みw3を用いてもよい。勿論、曲線的に変化する重みを用いてもよい。
図15において、横軸は電流値(Current)I[A]を表し、左側の縦軸は検出特性C151およびC152の出力(OUTPUT)電圧[V]を表し、右側の縦軸は重みw3を表す。この場合の重みw3は「0〜1」の範囲内の値である。検出特性C151およびC152は、それぞれ図14の検出特性C141およびC142に相当する。
図15に示した重みw3を用いる場合には、次の電流換算式により電流値I[A]を算出する。
I=w3×Id+(1−w3)×Iac×K ・・・(2)
Id:検出特性C151の出力電圧に相当する検出電流値
Iac:検出特性C152の出力電圧に相当する検出電流値
K:上記Id、Iacの値の差異を補償するための係数
I=w3×Id+(1−w3)×Iac×K ・・・(2)
Id:検出特性C151の出力電圧に相当する検出電流値
Iac:検出特性C152の出力電圧に相当する検出電流値
K:上記Id、Iacの値の差異を補償するための係数
上記第(2)式の計算を実行する場合には、図16に示した検出特性C164のように、被測定電流Iの変化に対して線形の特性を有する検出特性が得られる。なお、図16に示した各特性C161、C162、C163は、それぞれ図15中の各特性C151、C152、C153に対応する。また、図16において、横軸は電流値(Current)I[A]を表し、左側の縦軸は検出特性C161およびC162の出力(OUTPUT)電圧[V]を表し、右側の縦軸は重みw3を表す。
ところで、図12に示した検出特性C122においては、電流がゼロの近傍に特異点があり、電流のプラス側領域の特性C122(P)の左端の特異点と、電流のマイナス側領域の特性C122(N)の右端の特異点とが大きくずれ、不連続になっている。このような場合には、前述のように特性C122(P)、C122(N)の各々のオフセットを調整しても、実際には図13の特性C132のように綺麗な形状にはならない。
すなわち、図12中の特性C122(P)、C122(N)の各々についてオフセット調整を行った場合には、図17に示す特性C172のような形状になる。図17中の各特性C171、およびC172は、それぞれ図13に示した各特性C131、C132に相当する。つまり、特性C172においては、電流がゼロの近傍に非線形の領域C172aが現れる。
また、図17に示した特性C172の全体に係数「−1」を掛けた結果は、図18に示した特性C182になる。図18に示した各特性C181、およびC182は、それぞれ図17に示した各特性C171、C172に相当する。つまり、特性C182においては、電流がゼロの近傍に非線形の領域C182aが現れる。
更に、図18に示した各特性C181、およびC182に、図19に示した特性C193の重みw3で重み付けして前記第(2)式の電流換算を実施すると、図19に示した特性C194が得られる。なお、図19に示した各特性C191、およびC192は、それぞれ図18に示した各特性C181、C182に相当する。
つまり、図19に示した特性C194は全体的には線形であるが、電流がゼロの近傍に非線形の領域C194aが現れる。そこで、特性C194における非線形の領域C194aについて、ゲイン調整を実施する。このゲイン調整により、領域C194aを線形に修正することができ、図16に示した全体について線形な検出特性C164を得ることができる。
図1に示した磁界検出センサ200においては、交流バイアス磁界が印加される磁気インピーダンス素子12Aと、交流バイアス磁界が印加されされない磁気インピーダンス素子12Bとの両方を備えているので、広い磁界の範囲に亘って高精度の計測結果を得ることができる。すなわち、磁気インピーダンス素子12Aの影響を受ける信号SG2に基づいて外部磁界を検出する場合には、比較的磁界が小さい領域で高感度の検出ができるので、磁界が小さい領域で重みを大きくすることにより、全体の検出精度を高めることができる。また、磁気インピーダンス素子12Bの影響を受ける信号SG2Bに基づいて外部磁界を検出する場合には、比較的磁界が大きい領域で高感度の検出ができるので、磁界が大きい領域で重みを大きくすることにより、全体の検出精度を高めることができる。
また、図3に示したようなピラミッド型のインピーダンス特性を有する磁気インピーダンス素子12A、12Bを備えることにより、動作点を移動するために大きな直流バイアス電流を流す必要がなく、消費電流を抑制できる。
ここで、上述した本発明に係る磁界検出センサの実施形態の特徴をそれぞれ以下[1]〜[5]に簡潔に纏めて列記する。
[1] 磁気インピーダンス効果が生じる磁性材料を含む第1の磁気検出素子(磁気インピーダンス素子12A)および第2の磁気検出素子(磁気インピーダンス素子12B)と、
前記第1の磁気検出素子の前記磁性材料に対してバイアス磁界を印加するバイアスコイル(14)と、
前記第1の磁気検出素子および前記第2の磁気検出素子の前記磁性材料に対して高周波電流を供給する高周波発振回路(発振回路21)と、
前記バイアスコイルに交流バイアス電流を供給する交流バイアス回路(増幅器37)と、
前記バイアス磁界が印加される状態の前記第1の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第1の検出信号を生成する第1の検出回路(信号処理部23A)と、
前記バイアス磁界が印加されない状態の前記第2の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第2の検出信号を生成する第2の検出回路(信号処理部23B)と、
前記第1の検出信号および前記第2の検出信号に基づいて、外部磁界の大きさおよび方向を算出する磁界演算部(マイクロコンピュータ35)と、
を備えた磁界検出センサ。
[1] 磁気インピーダンス効果が生じる磁性材料を含む第1の磁気検出素子(磁気インピーダンス素子12A)および第2の磁気検出素子(磁気インピーダンス素子12B)と、
前記第1の磁気検出素子の前記磁性材料に対してバイアス磁界を印加するバイアスコイル(14)と、
前記第1の磁気検出素子および前記第2の磁気検出素子の前記磁性材料に対して高周波電流を供給する高周波発振回路(発振回路21)と、
前記バイアスコイルに交流バイアス電流を供給する交流バイアス回路(増幅器37)と、
前記バイアス磁界が印加される状態の前記第1の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第1の検出信号を生成する第1の検出回路(信号処理部23A)と、
前記バイアス磁界が印加されない状態の前記第2の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第2の検出信号を生成する第2の検出回路(信号処理部23B)と、
前記第1の検出信号および前記第2の検出信号に基づいて、外部磁界の大きさおよび方向を算出する磁界演算部(マイクロコンピュータ35)と、
を備えた磁界検出センサ。
[2] 前記第1の検出回路は、
外部磁界が印加されない状態の前記第1の磁気検出素子の特性におけるインピーダンスの極値位置を基準点とし、前記基準点からのインピーダンスの変化量に応じて変化する電気信号(SG2)を生成すると共に、
前記電気信号の電圧の変化の方向が切り替わる各頂点のタイミングにおける振幅を検出する振幅検出回路(33)と、前記電気信号の電位が前記第1の磁気検出素子の特性における前記基準点を通過するタイミングを検出する位相検出回路(34)と、の少なくとも一方を含む、
ことを特徴とする上記[1]に記載の磁界検出センサ。
外部磁界が印加されない状態の前記第1の磁気検出素子の特性におけるインピーダンスの極値位置を基準点とし、前記基準点からのインピーダンスの変化量に応じて変化する電気信号(SG2)を生成すると共に、
前記電気信号の電圧の変化の方向が切り替わる各頂点のタイミングにおける振幅を検出する振幅検出回路(33)と、前記電気信号の電位が前記第1の磁気検出素子の特性における前記基準点を通過するタイミングを検出する位相検出回路(34)と、の少なくとも一方を含む、
ことを特徴とする上記[1]に記載の磁界検出センサ。
[3] 前記磁界演算部は、前記第1の検出信号および前記第2の検出信号の少なくとも一方に対して状況に応じて変化する重み付け(表1、図15参照)を行い、外部磁界の大きさを算出する、
ことを特徴とする上記[1]に記載の磁界検出センサ。
ことを特徴とする上記[1]に記載の磁界検出センサ。
[4] 前記磁界演算部は、
互いに検出特性が異なる前記第1の検出信号と前記第2の検出信号とを組み合わせて、外部磁界の大きさおよび方向の算出に利用すると共に、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、複数の検出特性が互いに近づくよう、オフセットの補正、および領域毎の極性の補正を行う(図12〜図14参照)、
ことを特徴とする上記[1]に記載の磁界検出センサ。
互いに検出特性が異なる前記第1の検出信号と前記第2の検出信号とを組み合わせて、外部磁界の大きさおよび方向の算出に利用すると共に、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、複数の検出特性が互いに近づくよう、オフセットの補正、および領域毎の極性の補正を行う(図12〜図14参照)、
ことを特徴とする上記[1]に記載の磁界検出センサ。
[5] 前記磁界演算部は、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、小さい磁界に相当する非線形の領域(C194a)を線形に近づけるためにゲイン調整を行う、
ことを特徴とする上記[4]に記載の磁界検出センサ。
ことを特徴とする上記[4]に記載の磁界検出センサ。
12,12A,12B 磁気インピーダンス素子
12a 非磁性基板
12b 磁性薄膜
12c,12d 電極
14 バイアスコイル
20 駆動ユニット
21 発振回路
22A,22B ブリッジ回路
23A,23B 信号処理部
24,25,26 抵抗器
27,28 ピークホールド回路
29 計装増幅器
30 検出ユニット
31,34b 増幅器
32 スイッチ回路
33 振幅検出回路
33a ローパスフィルタ(LPF)
33c アナログスイッチ
33d ピークホールド回路
34 位相検出回路
34a,34c 微分回路
34d コンパレータ(COMP)
35 マイクロコンピュータ
36 スイッチ回路
37 増幅器
41 インピーダンス特性
41r 基準点
42 交流バイアス磁界
42P,42N 外部磁界と交流バイアス磁界の和
43,43P,43N センサ出力信号
100 プリント基板
100a,100b 電極
100c 切欠き部
200 磁界検出センサ
12a 非磁性基板
12b 磁性薄膜
12c,12d 電極
14 バイアスコイル
20 駆動ユニット
21 発振回路
22A,22B ブリッジ回路
23A,23B 信号処理部
24,25,26 抵抗器
27,28 ピークホールド回路
29 計装増幅器
30 検出ユニット
31,34b 増幅器
32 スイッチ回路
33 振幅検出回路
33a ローパスフィルタ(LPF)
33c アナログスイッチ
33d ピークホールド回路
34 位相検出回路
34a,34c 微分回路
34d コンパレータ(COMP)
35 マイクロコンピュータ
36 スイッチ回路
37 増幅器
41 インピーダンス特性
41r 基準点
42 交流バイアス磁界
42P,42N 外部磁界と交流バイアス磁界の和
43,43P,43N センサ出力信号
100 プリント基板
100a,100b 電極
100c 切欠き部
200 磁界検出センサ
Claims (5)
- 磁気インピーダンス効果が生じる磁性材料を含む第1の磁気検出素子および第2の磁気検出素子と、
前記第1の磁気検出素子の前記磁性材料に対してバイアス磁界を印加するバイアスコイルと、
前記第1の磁気検出素子および前記第2の磁気検出素子の前記磁性材料に対して高周波電流を供給する高周波発振回路と、
前記バイアスコイルに交流バイアス電流を供給する交流バイアス回路と、
前記バイアス磁界が印加される状態の前記第1の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第1の検出信号を生成する第1の検出回路と、
前記バイアス磁界が印加されない状態の前記第2の磁気検出素子のインピーダンス変化に基づいて、外部磁界の影響を含む第2の検出信号を生成する第2の検出回路と、
前記第1の検出信号および前記第2の検出信号に基づいて、外部磁界の大きさおよび方向を算出する磁界演算部と、
を備えた磁界検出センサ。 - 前記第1の検出回路は、
外部磁界が印加されない状態の前記第1の磁気検出素子の特性におけるインピーダンスの極値位置を基準点とし、前記基準点からのインピーダンスの変化量に応じて変化する電気信号を生成すると共に、
前記電気信号の電圧の変化の方向が切り替わる各頂点のタイミングにおける振幅を検出する振幅検出回路と、前記電気信号の電位が前記第1の磁気検出素子の特性における前記基準点を通過するタイミングを検出する位相検出回路と、の少なくとも一方を含む、
ことを特徴とする請求項1に記載の磁界検出センサ。 - 前記磁界演算部は、前記第1の検出信号および前記第2の検出信号の少なくとも一方に対して状況に応じて変化する重み付けを行い、外部磁界の大きさを算出する、
ことを特徴とする請求項1に記載の磁界検出センサ。 - 前記磁界演算部は、
互いに検出特性が異なる前記第1の検出信号と前記第2の検出信号とを組み合わせて、外部磁界の大きさおよび方向の算出に利用すると共に、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、複数の検出特性が互いに近づくよう、オフセットの補正、および領域毎の極性の補正を行う、
ことを特徴とする請求項1に記載の磁界検出センサ。 - 前記磁界演算部は、前記第1の検出信号、および前記第2の検出信号の少なくとも一方の検出特性に対して、小さい磁界に相当する非線形の領域を線形に近づけるためにゲイン調整を行う、
ことを特徴とする請求項4に記載の磁界検出センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016232819A JP2018091643A (ja) | 2016-11-30 | 2016-11-30 | 磁界検出センサ |
| US15/824,445 US10371759B2 (en) | 2016-11-30 | 2017-11-28 | Magnetic field detection sensor |
| DE102017221394.9A DE102017221394A1 (de) | 2016-11-30 | 2017-11-29 | Magnetfelderfassungssensor |
| CN201711242210.1A CN108152765A (zh) | 2016-11-30 | 2017-11-30 | 磁场检测传感器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016232819A JP2018091643A (ja) | 2016-11-30 | 2016-11-30 | 磁界検出センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018091643A true JP2018091643A (ja) | 2018-06-14 |
Family
ID=62190743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016232819A Abandoned JP2018091643A (ja) | 2016-11-30 | 2016-11-30 | 磁界検出センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10371759B2 (ja) |
| JP (1) | JP2018091643A (ja) |
| CN (1) | CN108152765A (ja) |
| DE (1) | DE102017221394A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020240941A1 (ja) * | 2019-05-27 | 2020-12-03 | 昭和電工株式会社 | 磁気センサ |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3201746A (en) * | 1963-07-31 | 1965-08-17 | Crawford S Askew | Test probe with grappler |
| JP3096413B2 (ja) | 1995-11-02 | 2000-10-10 | キヤノン電子株式会社 | 磁気検出素子、磁気センサー、地磁気検出型方位センサー、及び姿勢制御用センサー |
| JP3126642B2 (ja) * | 1995-11-09 | 2001-01-22 | 科学技術振興事業団 | 磁界センサ |
| US6032994A (en) * | 1998-11-25 | 2000-03-07 | Promos Technologies Inc. | Tools for positioning semiconductor chip test probes |
| JP4233161B2 (ja) | 1998-12-10 | 2009-03-04 | ミネベア株式会社 | 磁気センサ |
| TW534999B (en) * | 1998-12-15 | 2003-06-01 | Tdk Corp | Magnetic sensor apparatus and current sensor apparatus |
| JP4232280B2 (ja) * | 1999-07-22 | 2009-03-04 | パナソニック株式会社 | 磁気インピーダンスセンサ回路 |
| JP2002318250A (ja) * | 2001-02-16 | 2002-10-31 | Fuji Electric Co Ltd | 電流検出装置およびこれを用いた過負荷電流保安装置 |
| JP2002243815A (ja) * | 2001-02-16 | 2002-08-28 | Fuji Electric Co Ltd | 磁気検出装置 |
| CN100414255C (zh) * | 2004-12-16 | 2008-08-27 | 阿尔卑斯电气株式会社 | 角度检测传感器的补偿值计算方法以及使用其的角度检测传感器 |
| JP2006317402A (ja) * | 2005-05-16 | 2006-11-24 | Fuji Electric Systems Co Ltd | 電流センサ及び電力量演算装置 |
| US7639026B2 (en) * | 2006-02-24 | 2009-12-29 | Johnstech International Corporation | Electronic device test set and contact used therein |
| CN201007728Y (zh) * | 2007-03-06 | 2008-01-16 | 吉林大学 | 阵列式巨磁阻抗效应电流传感器 |
| CN101680740B (zh) * | 2007-05-29 | 2011-06-01 | Nxp股份有限公司 | 外部磁场角度确定 |
| CN104011550B (zh) * | 2011-12-28 | 2016-08-24 | 阿尔卑斯绿色器件株式会社 | 电流传感器 |
| JP6223674B2 (ja) * | 2012-11-01 | 2017-11-01 | 矢崎総業株式会社 | 磁気検出装置 |
| CN203310984U (zh) * | 2013-05-03 | 2013-11-27 | 中国地震局地球物理研究所 | 桥式电阻巨磁阻抗效应磁场传感器 |
| JP6325797B2 (ja) | 2013-11-08 | 2018-05-16 | 矢崎総業株式会社 | 磁界検出センサ |
| EP3224643B1 (en) * | 2014-11-14 | 2022-04-20 | Koninklijke Philips N.V. | Magnetic resonance fingerprinting in slices perpendicular to a predetermined direction |
| DE102014226262B4 (de) * | 2014-12-17 | 2016-08-04 | Siemens Healthcare Gmbh | Untersuchungsobjekt-spezifisches Erfassen von Magnetresonanz-Bilddaten mittels einer Magnetresonanz-Sequenz, welche zumindest einen adiabatischen Hochfrequenz-Puls umfasst |
| US10495709B2 (en) * | 2016-07-25 | 2019-12-03 | Siemens Healthcare Gmbh | Multi-contrast simultaneous multislice magnetic resonance imaging with binomial radio-frequency pulses |
-
2016
- 2016-11-30 JP JP2016232819A patent/JP2018091643A/ja not_active Abandoned
-
2017
- 2017-11-28 US US15/824,445 patent/US10371759B2/en not_active Expired - Fee Related
- 2017-11-29 DE DE102017221394.9A patent/DE102017221394A1/de not_active Withdrawn
- 2017-11-30 CN CN201711242210.1A patent/CN108152765A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| DE102017221394A1 (de) | 2018-05-30 |
| CN108152765A (zh) | 2018-06-12 |
| US10371759B2 (en) | 2019-08-06 |
| US20180149714A1 (en) | 2018-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6661570B2 (ja) | 磁界検出センサ | |
| JP6276190B2 (ja) | 磁場センサ | |
| Vopálenský et al. | Precise magnetic sensors | |
| WO2007102331A1 (ja) | 磁気検出装置及びそれを用いた電子方位計 | |
| US9791522B2 (en) | Magnetic field detection sensor | |
| JP2007271599A (ja) | オフセット補正プログラム及び電子コンパス | |
| JP2015527565A (ja) | スピントルク型磁気センサー | |
| JP7006633B2 (ja) | 磁気センサシステム | |
| JPH09152473A (ja) | 磁気探知装置 | |
| US20090219011A1 (en) | Correcting Offset in Magneto-Resistive Devices | |
| JP6823878B2 (ja) | フラックスゲート磁界センサ | |
| JP2018091643A (ja) | 磁界検出センサ | |
| JP6870960B2 (ja) | 磁界検出センサ | |
| JP4735930B2 (ja) | 磁界検出方法及び装置 | |
| JPS61163425A (ja) | 座標読取装置 | |
| JP2013127409A (ja) | 波形測定器 | |
| JP4503806B2 (ja) | 位置検出装置 | |
| JP6769882B2 (ja) | 磁気センサ | |
| JP2021025820A (ja) | 磁界検出センサ | |
| JP2020041945A (ja) | 磁界検出センサ | |
| JP2001241983A (ja) | 電磁流量計 | |
| JP2002006016A (ja) | 磁気センサ | |
| RU2625440C2 (ru) | Детектор элементов каркаса со схемой регулирования | |
| JP2007085824A (ja) | 磁気検出装置 | |
| JP2000338210A (ja) | フラックスゲート型磁気センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191017 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20200410 |