JP2017190237A - 進行波搬送装置 - Google Patents
進行波搬送装置 Download PDFInfo
- Publication number
- JP2017190237A JP2017190237A JP2016081745A JP2016081745A JP2017190237A JP 2017190237 A JP2017190237 A JP 2017190237A JP 2016081745 A JP2016081745 A JP 2016081745A JP 2016081745 A JP2016081745 A JP 2016081745A JP 2017190237 A JP2017190237 A JP 2017190237A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- traveling wave
- phase difference
- region
- excitation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005284 excitation Effects 0.000 claims description 58
- 230000002123 temporal effect Effects 0.000 claims description 10
- 230000002441 reversible effect Effects 0.000 claims description 5
- 239000013589 supplement Substances 0.000 claims description 4
- 230000001502 supplementing effect Effects 0.000 claims description 3
- 238000006073 displacement reaction Methods 0.000 abstract description 10
- 238000012986 modification Methods 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 238000005452 bending Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 238000011084 recovery Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images











Landscapes
- Jigging Conveyors (AREA)
Abstract
Description
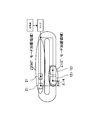
20z、120z、220z、320z、420z…軌道
21…駆動手段(圧電素子)
4…駆動源
5、51、52…アンプ
6…加振力補完手段
f1…固有振動数(第1加振領域)
f2…固有振動数(第2加振領域)
Z1…第1加振領域
Z2…第2加振領域
Claims (6)
- 閉じた軌道に対し、互いに空間的位相差のある第1加振領域および第2加振領域に2つの波を時間的位相差をもって与えることで進行波を発生させ、前記軌道の少なくとも一部に搬送機能をもたせるようにしたものであって、
前記時間的位相差が、第1加振領域と第2加振領域の間で機械的な対称性を崩すことによる固有振動数のずれに起因した機械的な位相差によって実現されており、これら第1加振領域および第2加振領域に設けた駆動手段に対して、共通の駆動源から同相で電気的駆動を行うようにしたことを特徴とする進行波搬送装置。 - 駆動源が、第1加振領域または第2加振領域の何れか一方の固有振動数に近い周波数で駆動を行なうように構成され、他方の振幅低下を補う加振補完手段を設けている請求項1に記載の進行波搬送装置。
- 加振補完手段が駆動手段を構成する駆動要素の併設数または面積の差によって実現されている請求項2に記載の進行波搬送装置。
- 加振補完手段が駆動手段と駆動源の間に介在させるアンプのゲイン差によって実現されている請求項2に記載の進行波搬送装置。
- 駆動源が、第1加振領域または第2加振領域の各固有振動数のほぼ中間の周波数で駆動を行なうように構成されている請求項1に記載の進行波搬送装置。
- 軌道をトラック状に周回させて、一方向への主搬送路と、逆方向へのリターン路とにそれぞれ搬送力を付与するように構成され、主搬送路の先に排出口を設けている請求項1〜5の何れかに記載の進行波搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081745A JP6659952B2 (ja) | 2016-04-15 | 2016-04-15 | 進行波搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081745A JP6659952B2 (ja) | 2016-04-15 | 2016-04-15 | 進行波搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017190237A true JP2017190237A (ja) | 2017-10-19 |
| JP6659952B2 JP6659952B2 (ja) | 2020-03-04 |
Family
ID=60084607
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016081745A Active JP6659952B2 (ja) | 2016-04-15 | 2016-04-15 | 進行波搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6659952B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04173636A (ja) * | 1990-11-06 | 1992-06-22 | Canon Inc | 被搬送体送り装置 |
| JPH06127655A (ja) * | 1992-10-16 | 1994-05-10 | Nasuka:Kk | 超音波パーツフィーダ |
| JPH10263477A (ja) * | 1997-03-21 | 1998-10-06 | Canon Inc | 振動型駆動装置および振動型駆動装置を駆動源とする装置 |
| JP2000289831A (ja) * | 1999-03-31 | 2000-10-17 | Shinko Electric Co Ltd | リニア振動型パーツフィーダ |
| JP2003206019A (ja) * | 2002-01-15 | 2003-07-22 | Daishin:Kk | 振動式部品供給装置 |
| JP2013039981A (ja) * | 2011-08-11 | 2013-02-28 | Sinfonia Technology Co Ltd | ワーク選別装置 |
-
2016
- 2016-04-15 JP JP2016081745A patent/JP6659952B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04173636A (ja) * | 1990-11-06 | 1992-06-22 | Canon Inc | 被搬送体送り装置 |
| JPH06127655A (ja) * | 1992-10-16 | 1994-05-10 | Nasuka:Kk | 超音波パーツフィーダ |
| JPH10263477A (ja) * | 1997-03-21 | 1998-10-06 | Canon Inc | 振動型駆動装置および振動型駆動装置を駆動源とする装置 |
| JP2000289831A (ja) * | 1999-03-31 | 2000-10-17 | Shinko Electric Co Ltd | リニア振動型パーツフィーダ |
| JP2003206019A (ja) * | 2002-01-15 | 2003-07-22 | Daishin:Kk | 振動式部品供給装置 |
| JP2013039981A (ja) * | 2011-08-11 | 2013-02-28 | Sinfonia Technology Co Ltd | ワーク選別装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6659952B2 (ja) | 2020-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6817513B2 (ja) | ワーク搬送装置 | |
| KR102428116B1 (ko) | 워크 반송 장치 | |
| TW201711940A (zh) | 直線送料機 | |
| JP7506309B2 (ja) | シュート、振動搬送装置 | |
| JP2017190237A (ja) | 進行波搬送装置 | |
| JP2018100139A (ja) | らせん型ワーク搬送装置およびパーツフィーダ | |
| JP6871515B2 (ja) | ワーク搬送装置 | |
| JP7125585B2 (ja) | ワーク搬送装置 | |
| JP6849926B2 (ja) | ワーク搬送装置 | |
| JP6777857B2 (ja) | ワーク搬送装置 | |
| JP2018108870A (ja) | ワーク搬送装置 | |
| JP7004914B2 (ja) | ボウルフィーダ | |
| JP2018095460A (ja) | ワーク搬送装置 | |
| JPH02146971A (ja) | 圧電モータおよび圧電モータの駆動方法 | |
| JP6923783B2 (ja) | ワーク搬送装置 | |
| JP6820471B2 (ja) | ワーク搬送装置 | |
| JP5224170B2 (ja) | 部品供給装置 | |
| JP6931165B2 (ja) | ワーク搬送装置 | |
| JP2024076572A (ja) | シュート、振動搬送装置 | |
| JP2024078007A (ja) | シュート、振動搬送装置 | |
| JP5168622B2 (ja) | 部品供給装置 | |
| JP6864219B2 (ja) | ワーク搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6659952 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |