JP2017148657A - 外科手術器具の画像取込み装置 - Google Patents
外科手術器具の画像取込み装置 Download PDFInfo
- Publication number
- JP2017148657A JP2017148657A JP2017114998A JP2017114998A JP2017148657A JP 2017148657 A JP2017148657 A JP 2017148657A JP 2017114998 A JP2017114998 A JP 2017114998A JP 2017114998 A JP2017114998 A JP 2017114998A JP 2017148657 A JP2017148657 A JP 2017148657A
- Authority
- JP
- Japan
- Prior art keywords
- image capture
- image
- sensor
- light
- capture sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000003287 optical effect Effects 0.000 claims abstract description 250
- 238000005286 illumination Methods 0.000 claims description 117
- 238000000034 method Methods 0.000 claims description 87
- 230000010287 polarization Effects 0.000 claims description 62
- 239000013598 vector Substances 0.000 abstract description 73
- 230000001965 increasing effect Effects 0.000 abstract description 12
- 238000000576 coating method Methods 0.000 description 68
- 239000011248 coating agent Substances 0.000 description 65
- 230000008569 process Effects 0.000 description 57
- 230000009977 dual effect Effects 0.000 description 50
- 230000000712 assembly Effects 0.000 description 40
- 238000000429 assembly Methods 0.000 description 40
- 238000003384 imaging method Methods 0.000 description 32
- 230000005284 excitation Effects 0.000 description 21
- 238000012937 correction Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 17
- 230000006870 function Effects 0.000 description 17
- 238000012545 processing Methods 0.000 description 17
- 238000005070 sampling Methods 0.000 description 17
- 230000008901 benefit Effects 0.000 description 12
- 239000000463 material Substances 0.000 description 11
- 238000013507 mapping Methods 0.000 description 10
- 239000003086 colorant Substances 0.000 description 8
- 238000002189 fluorescence spectrum Methods 0.000 description 8
- 238000001228 spectrum Methods 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 7
- 239000000758 substrate Substances 0.000 description 7
- 101100248200 Arabidopsis thaliana RGGB gene Proteins 0.000 description 6
- 238000013461 design Methods 0.000 description 6
- 239000010410 layer Substances 0.000 description 6
- 239000004973 liquid crystal related substance Substances 0.000 description 6
- 239000004065 semiconductor Substances 0.000 description 6
- 238000000926 separation method Methods 0.000 description 6
- 230000026676 system process Effects 0.000 description 6
- 230000000295 complement effect Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 239000000919 ceramic Substances 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 229910052724 xenon Inorganic materials 0.000 description 4
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 description 4
- 230000004075 alteration Effects 0.000 description 3
- 210000002858 crystal cell Anatomy 0.000 description 3
- 239000000975 dye Substances 0.000 description 3
- GNBHRKFJIUUOQI-UHFFFAOYSA-N fluorescein Chemical compound O1C(=O)C2=CC=CC=C2C21C1=CC=C(O)C=C1OC1=CC(O)=CC=C21 GNBHRKFJIUUOQI-UHFFFAOYSA-N 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 230000003595 spectral effect Effects 0.000 description 3
- 238000001429 visible spectrum Methods 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 239000003795 chemical substances by application Substances 0.000 description 2
- 238000004040 coloring Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 230000002708 enhancing effect Effects 0.000 description 2
- 238000000799 fluorescence microscopy Methods 0.000 description 2
- 102000034287 fluorescent proteins Human genes 0.000 description 2
- 108091006047 fluorescent proteins Proteins 0.000 description 2
- 238000001727 in vivo Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 210000005036 nerve Anatomy 0.000 description 2
- 239000013307 optical fiber Substances 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 229920006395 saturated elastomer Polymers 0.000 description 2
- 239000000243 solution Substances 0.000 description 2
- 239000002344 surface layer Substances 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 201000009273 Endometriosis Diseases 0.000 description 1
- 206010027646 Miosis Diseases 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000010420 art technique Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000000295 emission spectrum Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000007850 fluorescent dye Substances 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 1
- 229910052753 mercury Inorganic materials 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000001575 pathological effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 238000009738 saturating Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 210000002435 tendon Anatomy 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00096—Optical elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00193—Optical arrangements adapted for stereoscopic vision
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
- A61B1/051—Details of CCD assembly
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00982—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combined with or comprising means for visual or photographic inspections inside the body, e.g. endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
- A61B2090/3618—Image-producing devices, e.g. surgical cameras with a mirror
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/371—Surgical systems with images on a monitor during operation with simultaneous use of two cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Public Health (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Biophysics (AREA)
- Signal Processing (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Gynecology & Obstetrics (AREA)
- Endoscopes (AREA)
- Multimedia (AREA)
- Astronomy & Astrophysics (AREA)
- General Physics & Mathematics (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Studio Devices (AREA)
- Structure And Mechanism Of Cameras (AREA)
- Closed-Circuit Television Systems (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Stroboscope Apparatuses (AREA)
Abstract
Description
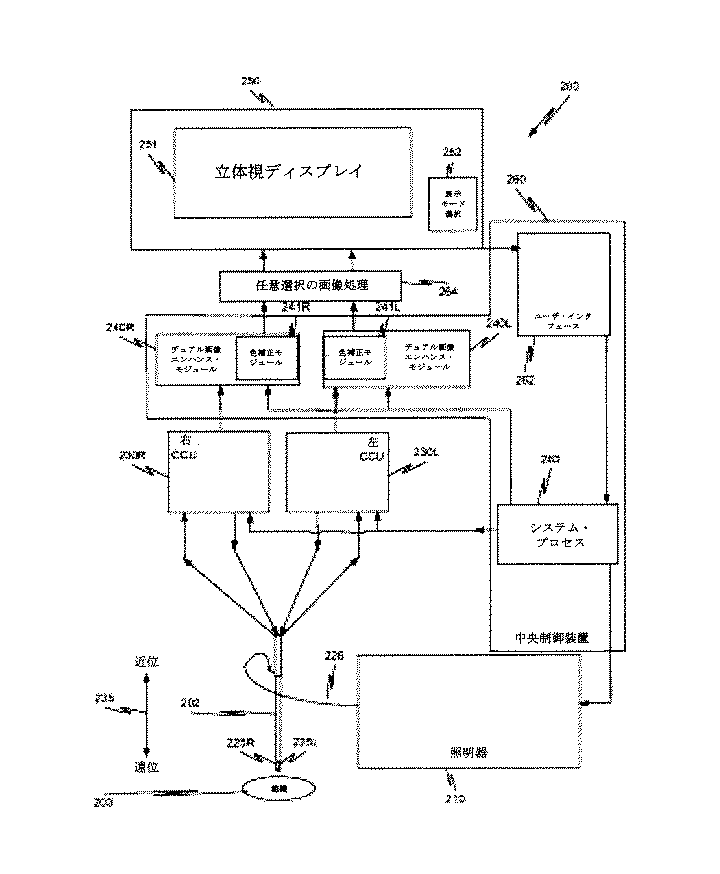
外科手術部位のシーンの画像で時折生じる問題の1つに、執刀医用制御コンソール250で執刀医に対して提示される画像をエンハンスしようとしたときの飽和がある。1つの理由は、通常は視野内にある外科手術器具が組織より多くの光を反射することである。別の問題は、例えば神経や患部など、組織表面に直接的に存在していないようなシーン内の関心のあるフィーチャを識別することである。
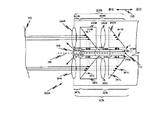
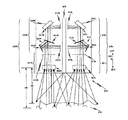
図5Aは、画像取込みユニット525Lおよび525Rならびに照明器からの非偏光光を供給する照明チャネル505を備える立体視内視鏡502Aの遠位端部を示す概略図である。矢印535が示すように、遠位方向は、組織503に向かう方向であり、近位方向は、組織503から離れる方向である。
図5Bは、画像取込みユニット525Rおよび525Lならびに照明器からの光を供給する照明チャネル505を備える立体視内視鏡502Bの遠位端部を示す概略図である。矢印535が示すように、遠位方向は、組織503に向かう方向であり、近位方向は、組織503から離れる方向である。
内視鏡の遠位端部に従来技術のカメラを配置しても立体視カラー画像は得られるが、これらのカメラは、各立体視チャネルで画像をとらえる1つのCCDが提供する解像度およびダイナミック・レンジに制限される。立体視内視鏡の従来のカメラと同様に、解像度は、CCDの画素数およびカラー・フィルタ・アレイによって制限される。立体視内視鏡の遠位端部では利用できる空間が制限されていることを考えると、CCDの画素数を増やすことは実用的ではないので、解像度をさらに上げることは実用的ではなかった。
1つの態様では、プリズム・アセンブリ630R(630L)のコーティングされた第1の面631R(631L)は、プリズム・アセンブリ630R(630L)がレンズ・アセンブリ601R(601L)から受光した光の反射させる部分と透過させる部分がほぼ等しくなるように、すなわち第1の割合と第2の割合がほぼ等しくなるように構成される。ビーム・スプリッタ631R(631L)が反射させる光と透過させる光がほぼ等しいとき、そのビーム・スプリッタは、バランス・ビーム・スプリッタと呼ばれる。画像取込みセンサ610R(610L)および615R(615L)はそれぞれ、この態様では、カラー・フィルタ・アレイを有するカラー・センサである。このカラー・フィルタ・アレイは、ベイヤー・カラー・フィルタ・アレイである。したがって、2つのベイヤー・パターン画像取込みセンサが、同じシーンで同じ光学素子を透かし見ている。ここで、ベイヤー・パターン画像取込みセンサは、ベイヤー・カラー・フィルタ・アレイを含む単一のチップ・センサ、または単一のチップの一部である。上述のように、同一平面の画像取込みセンサ610R(610L)および615R(615L)は、共通の前端部光学構造を有し、各センサまでの光路長がほぼ同じである。
別の態様では、プリズム・アセンブリ630R(630L)のコーティングされた第1の面631R(631L)は、依然として、プリズム・アセンブリ630R(630L)が受光した光の反射させる部分と透過させる部分がほぼ等しくなるように、すなわち第1の割合と第2の割合がほぼ等しくなるように構成される。画像取込みセンサ610R(610L)および615R(615L)はそれぞれ、ベイヤー・カラー・フィルタ・アレイを有するカラー・センサである。この場合も、同一平面の画像取込みセンサ610R(610L)および615R(615L)は、共通の前端部光学構造を有し、各センサまでの光路長がほぼ同じである。ただし、総光路長は変化しないが、プリズム・アセンブリ630R(630L)の面631R(631L)および632R(632L)が若干傾斜しており、画像取込みセンサ610R(610L)が取り込んだ画像が、画像取込みセンサ615R(615L)が取り込んだ画像から半画素分だけオフセットしている。
さらに別の態様では、プリズム・アセンブリ630R(630L)のコーティングされた第1の面631R(631L)は、プリズム・アセンブリ630Rがレンズ・アセンブリ601R(601L)から受光した光の第1の色成分を反射し、受光した光の他の色成分を透過させるように構成される。この態様では、画像取込みセンサ610R(610L)および615R(615L)は、それぞれベイヤー・カラー・フィルタ・アレイを有するカラー・センサではない。
通常、外科手術部位画像は類似しており、明るい中央領域と、それより暗い周辺領域とを有する。また、一部の外科手術器具からの反射は、組織からの反射よりはるかに明るい。これにより、従来技術の内視鏡の画像取込みセンサが取り込む輝度値の範囲に差が生じる。輝度値が画像取込みセンサのダイナミック・レンジを超えた場合には、それらの画素の値はクリッピングされる、すなわち、その画像取込みセンサの最高値に設定される。
M≒(S1max/Bmax)
M=100/400=1/4
M%=25%
N%=75%
現在では、ほとんどの撮像システムで、3つの可視色成分、すなわち赤、緑および青(RGB)を使用しており、これは3原色モデルと呼ばれる。ほとんどのカメラでは、RGB型カラー・フィルタ・アレイを有するベイヤー・カラー・フィルタ・アレイ型画像取込みセンサを使用している。3原色モデルは、ほとんどの液晶ディスプレイ(LCD)およびプラズマ・ディスプレイでも使用されている。
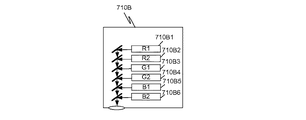
第1の態様では、6色成分照明器710B(図7B)は、照明チャネル705(図7A)に結合される。照明器710Bは、赤色成分R1、赤色成分R2、緑色成分G1、緑色成分G2、青色成分B1、および青色成分B2をそれぞれ生成する、6個のレーザ照明源710B1から710B6を含む。これらのレーザ照明源では、赤色成分R1およびR2、緑色成分G1およびG2、ならびに青色成分B1およびB2の波長は、従来の発光ダイオード型照明器では色成分ごとに約60ナノメートル(nm)であるのに対して、通常2から5nmの幅を有する。照明源710B1用のミラーおよび照明源710B2から710B6用のダイクロイック・ミラーを有する複数の照明源を備えた照明器の構成は既知であるので、本明細書ではこれ以上詳細に考慮しない。例えば、参照により本明細書に組み込む米国特許出願第12/855905号(「デュアル・スペクトル蛍光を用いる外科手術用照明器」、2010年8月13日出願)を参照されたい。
第2の態様では、白色広帯域照明器710C(図7C)は、照明チャネル705(図7A)に結合される。1つの例では、照明器710Cは、楕円形の背面反射器および帯域フィルタ・コーティングを有するキセノン・ランプ710C1を使用して、赤外線成分をほとんど含まない広帯域の白色照明光を生成する。キセノン・ランプを使用することは単なる例示であり、限定を目的としたものではない。例えば、高圧水銀アーク・ランプ、その他のアーク・ランプ、またはその他の広帯域光源を使用することができる。
第3の態様では、照明器710C(図7C)は、照明チャネル705(図7A)に結合される。照明器710Cは、上述したものと同じであるので、ここで同じ説明を繰り返すことはしない。したがって、シーンは、照明器710Cからの広帯域白色光によって照明される。
第4の態様では、照明器710D(図7D)は、照明チャネル705(図7A)に結合される。照明器710Dは、赤色成分R1、緑色成分G1および青色成分B1をそれぞれ生成する、3つのレーザ照明源710D1から710D3を含む。本明細書では、3つのレーザ照明源710D1から710D3を3つのレーザ照明モジュールと呼ぶこともある。複数の異なる照明源、照明源710D1用のミラーならびに照明源710D2および710D3用のダイクロイック・ミラーを有する照明器の構成は、既知である。これらのレーザ照明源では、赤色成分R1、緑色成分G1および青色成分B1の波長は、従来の発光ダイオード型照明器では色成分ごとに約60nmであるのに対して、通常2から5ナノメートル(nm)の幅を有する。
外科手術内視鏡では、可能な限り鮮鋭で明るい画像を執刀医に提供することが望ましい。そのためには、可能な限り大きな開口を有するレンズ設計が必要である。開口が大きくなるほど、形成される画像が(センサの限界内で)鮮鋭になり、通過する光が増えるので画像が明るくなる(信号対雑音比が向上する)。ただし、開口が大きくなると被写界深度が浅くなるという交換条件がある。執刀医は、カメラから様々な距離のところにある複数のものを見るときに撮像システムの焦点を制御しなければならなくなることを避けるために、大きな被写界深度を有する画像を好む。したがって、執刀医にとっては、大きな開口の鮮鋭度および輝度と、大きく改善された被写界深度とを有する画像があれば好ましい。この目的を達成するために、画像取込みユニット825Lおよび825R(図8A)はそれぞれ、異なる焦点で組織803の画像を取り込む。デュアル画像エンハンス・モジュール240R、240L(図2)は、取り込まれた画像を処理し、以前には実現できなかった被写界深度機能を執刀医に提供する。
装置は、第1のセンサ面を含む第1の画像取込みセンサと、第2のセンサ面を含む第2の画像取込みセンサとを含み、第1および第2の画像取込みセンサ面が同一平面にあり、さらに、光を受光するように位置決めされ、受光した光の第1の部分を第1のセンサ面に向けて送り、受光した光の第2の部分を通過させるように構成されたビーム・スプリッタと、受光した光の第2の部分を受光し、受光した光の第2の部分を第2の画像取込みセンサに向けて送るように位置決めされた反射ユニットとを含む。いくつかの態様では、第1の画像取込みセンサおよび第2の画像取込みセンサは、1つの画像取込みセンサ・チップの異なる領域を構成することができる。いくつかの態様では、この装置は、第1の画像取込みセンサおよび第2の画像取込みセンサと、ビーム・スプリッタと、反射ユニットとを有する遠位端部を含む内視鏡を有することができる。いくつかの態様では、この装置は、遠位端部、1対のチャネル、ならびに複数の第1および第2の画像取込みセンサと、ビーム・スプリッタと、反射ユニットとを含む立体視内視鏡をさらに含むことができ、第1の画像取込みセンサ、第2の画像取込みセンサ、ビーム・スプリッタおよび反射ユニットは複数含まれ、1対のチャネルの各チャネルは、立体視内視鏡の遠位端部に、異なる第1の画像取込みセンサ、異なる第2の画像取込みセンサ、異なるビーム・スプリッタおよび異なる反射ユニットを複数含む。いくつかの態様では、この装置は、ビーム・スプリッタを含むプリズム・アセンブリをさらに有することができ、このビーム・スプリッタが、受光した光の第1の部分を反射し、受光した光の第2の部分を通過させるように構成されること、および/または、プリズム・アセンブリが、第1の面から受光した光を第1のセンサ面に向けて送るように構成された第2の面をさらに含むことができ、第2の面が、他の光が第2の面に入射しないように位置決めされること、および/または、第1の面が、多層コーティング面をさらに含むことができること、および/または、反射ユニットが、受光した光の第2の部分を第2の画像取込みセンサの表面に反射するように位置決めされた反射面をさらに含むことができること、および/または、第1の面が、45度未満の入射角を有することができること、および/または、プリズム・アセンブリおよび反射ユニットが、1つの一体構造を構成し(例えば2つもしくは3つの部品を接着したもの、またはペンタプリズムなど)、第1の面が、多層コーティング面を含むことができること、および/または、この1つの一体構造が、2つの部品を接着したものおよび3つの部品を接着したものの一方を含むことができること、および/または、この1つの一体構造が、ペンタプリズムを含むことができること、および/または、この装置が、プリズム・アセンブリの遠位に近接して位置決めされた遮蔽体をさらに含むことができ、遮蔽体の遠位に近接して位置決めされた液晶型合焦素子を必要に応じてさらに含むこと、および/または、プリズム・アセンブリが、受光した光がプリズム・アセンブリに進入する第1の面をさらに含むことができ、第1の面から第1のセンサ面までの第1の光路長が、第1の面から第2のセンサ面までの第2の光路長とほぼ等しい、または第1の面から第2のセンサ面までの第2の光路長と異なり、2つの光路長の差が第1の画像取込みセンサが取得する画像と第2の画像取込みセンサが取得する画像の間の焦点の違いをもたらすように構成されるようになっていることを特徴とする。いくつかの態様では、ビーム・スプリッタは、受光した光の第1の部分を反射し、受光した光の第2の部分を透過させるように構成されたコーティング面をさらに含むことができ、受光した光の第1の部分および第2の部分は、受光した光の異なる、または実質的に等しい、第1の割合および第2の割合である。いくつかの態様では、第1の画像取込みセンサおよび第2の画像取込みセンサは、両方ともカラー画像取込みセンサを含むこともできるし、あるいは一方がモノクロ画像取込みセンサを含むこともできる
装置は、第1のセンサ面を含む第1の画像取込みセンサと、第2のセンサ面を含む第2の画像取込みセンサとを含み、第1のセンサ面が第1の平面内にあり、第2のセンサ面が第2の平面内にあり、第1の平面と第2の平面が実質的に平行であり、既知の距離だけ離間しており、さらに、光を受光するように位置決めされ、受光した光の第1の部分を第1のセンサ面に向けて送り、受光した光の第2の部分を通過させるように構成されたビーム・スプリッタと、受光した光の第2の部分を受光し、受光した光の第2の部分を第2の画像取込みセンサに向けて送るように位置決めされた反射ユニットとを含む。
装置は、第1のセンサ面を含む第1の画像取込みセンサと、第2のセンサ面を含む第2の画像取込みセンサと、第1のレンズ・アセンブリと、第2のレンズ・アセンブリと、第1のレンズ・アセンブリを通過した光を受光し、第1のレンズ・アセンブリから受光した光を第1のセンサ面に反射するように位置決めされ、かつ第2のレンズ・アセンブリを通過した光を受光し、第2のレンズ・アセンブリから受光した光を第2のセンサ面に反射するように位置決めされた反射ユニットとを含み、第1のレンズ・アセンブリから第1のセンサ面までの第1の光路長は、第2のレンズ・アセンブリから第2のセンサ面までの第2の光路長とほぼ等しい。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面であってもよいし、あるいは第1および第2のセンサ面はそれぞれ、実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。
方法は、共通の前端部光学系から受光した光の第1の部分から、第1の画像を、画像取込みユニットの第1の画像取込みセンサで取り込むステップと、共通の前端部光学系から受光した光の第2の部分から、第2の画像を、画像取込みユニットの第2の画像取込みセンサで取り込むステップとを含み、第1および第2の画像取込みセンサは同一平面であり、第1の画像と第2の画像は、取込み時に互いに空間的に位置合わせされる。いくつかの態様では、この方法は、画像取込みユニットのビーム・スプリッタによって、受光した光を第1の部分と第2の部分とに分離するステップと、受光した光の第1の部分を第1の画像取込みセンサに向けて送るステップと、この光の第2の部分を第2の画像取込みセンサに向けて送るステップとをさらに含むことができる。
装置は、第1の画像取込みセンサ面を含む第1の画像取込みセンサと、第2の画像取込みセンサ面を含む第2の画像取込みセンサと、光を受光するように位置決めされたプリズム・アセンブリであり、受光した光がプリズム・アセンブリに進入する遠位面、受光した光の偏光状態に基づいて受光した光の第1の部分を反射し、受光した光の偏光状態に基づいて受光した光の第2の部分を透過させるように構成されたビーム・スプリッタ、および受光した光の第1の部分を第1の画像取込みセンサに向けて送るように構成された表面を含むプリズム・アセンブリと、受光した光の第2の部分を受光し、受光した光の第2の部分を第2の画像取込みセンサに向けて送るように位置決めされた反射ユニットとを含み、遠位面から第1のセンサ面までの第1の光路長は、遠位面から第2のセンサ面までの第2の光路長とほぼ等しい。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面とすることができる。いくつかの態様では、第1および第2のセンサ面は、それぞれ、実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。いくつかの態様では、第1の画像取込みセンサおよび第2の画像取込みセンサは、1つの画像取込みセンサ・チップの異なる領域を構成することができる。いくつかの態様では、この装置は、第1の画像取込みセンサおよび第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを有する遠位端部を含む内視鏡を有することができる。いくつかの態様では、この装置は、遠位端部、1対のチャネル、ならびに複数の第1および第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを含む立体視内視鏡をさらに含むことができ、第1の画像取込みセンサ、第2の画像取込みセンサ、プリズム・アセンブリおよび反射ユニットは複数含まれ、1対のチャネルの各チャネルは、立体視内視鏡の遠位端部に、異なる第1の画像取込みセンサ、異なる第2の画像取込みセンサ、異なるプリズム・アセンブリおよび異なる反射ユニットを複数含む。いくつかの態様では、ビーム・スプリッタは、多層コーティング面を含むことができる。いくつかの態様では、反射ユニットは、受光した光の第2の部分を第2の画像取込みセンサに反射するように位置決めされた反射面をさらに含むことができる。いくつかの態様では、プリズム・アセンブリおよび反射ユニットは、1つの一体構造(例えば2つもしくは3つの部品を接着したもの、および/またはペンタプリズムなど)を構成することができる。いくつかの態様では、ビーム・スプリッタは、45度未満の入射角を有することができる。いくつかの態様では、この装置は、ビーム・スプリッタの遠位に位置決めされた遮蔽体をさらに含むことができる。いくつかの態様では、この装置は、遮蔽体とプリズム・アセンブリの遠位面との間に位置決めされた4分の1波長板をさらに含むことができる。いくつかの態様では、この装置は、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができ、この制御装置は、第1の画像取込みセンサによって取り込まれた第1の画像と第2の画像取込みセンサによって取り込まれた第2の画像とを結合して、受光した光の偏光の差に基づいてその中のフィーチャの顕著性を高めた画像を生成する。いくつかの態様では、この装置は、偏光を有する照明源をさらに含むことができ、受光する光は、この偏光とは異なる偏光を有する反射光と、この偏光を有する反射光とを含む。いくつかの態様では、この装置は、非偏光照明源をさらに含むことができ、受光する光は、反射非偏光光および反射偏光光を含む。
方法は、共通の前端部光学系から受光した光の第1の偏光部分から、第1の画像を、画像取込みユニットの第1の画像取込みセンサで取り込むステップと、共通の前端部光学系から受光した光の第2の部分から、第2の画像を、画像取込みユニットの第2の画像取込みセンサで取り込むステップとを含み、共通の前端部光学系から第1のセンサ面までの第1の光路長は、共通の前端部光学系から第2のセンサ面までの第2の光路長とほぼ等しい。いくつかの態様では、第1および第2の画像取込みセンサは、同一平面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。いくつかの態様では、この方法は、画像取込みユニットのビーム・スプリッタの偏光に基づいて、受光した光を第1の偏光部分と第2の部分に分離するステップと、受光した光の第1の偏光部分をビーム・スプリッタによって第1の画像取込みセンサに向けて送るステップと、この光の第2の部分を反射ユニットによって第2の画像取込みセンサに向けて送るステップとをさらに含むことができる。いくつかの態様では、この方法は、第1の画像取込みセンサによって取り込まれた第1の画像と第2の画像取込みセンサによって取り込まれた第2の画像とを結合して、受光した光の偏光の差に基づいてその中のフィーチャの顕著性を高めた画像を生成するステップをさらに含むことができる。いくつかの態様では、この方法は、偏光光または非偏光光でシーンを照明するステップをさらに含むことができる。
装置は、第1の画像取込みセンサ面を含む第1の画像取込みセンサと、第2の画像取込みセンサ面を含む第2の画像取込みセンサと、光を受光するように位置決めされたプリズム・アセンブリであり、受光した光がプリズム・アセンブリに進入する遠位面、受光した光の第1の割合を反射し、受光した光の第2の割合を透過させるように構成されたビーム・スプリッタ、および受光した光の第1の割合を第1の画像取込みセンサに向けて送るように構成された表面を含むプリズム・アセンブリと、受光した光の第2の割合を受光し、受光した光の第2の割合を第2の画像取込みセンサに向けて送るように位置決めされた反射ユニットとを含み、遠位面から第1のセンサ面までの第1の光路長は、遠位面から第2のセンサ面までの第2の光路長とほぼ等しい。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。いくつかの態様では、第1の画像取込みセンサおよび第2の画像取込みセンサは、1つの画像取込みセンサ・チップの異なる領域を構成することができる。いくつかの態様では、この装置は、第1の画像取込みセンサおよび第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを有する遠位端部を含む内視鏡を有することができる。いくつかの態様では、この装置は、遠位端部、1対のチャネル、ならびに複数の第1および第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを含む立体視内視鏡をさらに有することができ、第1の画像取込みセンサ、第2の画像取込みセンサ、プリズム・アセンブリおよび反射ユニットは複数含まれ、1対のチャネルの各チャネルは、立体視内視鏡の遠位端部に、異なる第1の画像取込みセンサ、異なる第2の画像取込みセンサ、異なるプリズム・アセンブリおよび異なる反射ユニットを複数含む。いくつかの態様では、プリズム・アセンブリは、ペンタプリズムを含むことができる。いくつかの態様では、この装置は、プリズム・アセンブリの遠位に位置決めされた遮蔽体をさらに含むことができる。いくつかの態様では、100パーセントから第1の割合を引くと、ほぼ第2の割合になる。いくつかの態様では、第1および第2の画像取込みセンサは、カラー・センサを含むことができる。いくつかの態様では、この装置は、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができ、この制御装置が、第1の画像取込みセンサによって取り込まれた第1の画像から得られる情報と第2の画像取込みセンサによって取り込まれた第2の画像から得られる情報とを結合して、単一の画像取込みセンサによって取り込まれた画像よりエンハンスされた空間解像度およびエンハンスされたダイナミック・レンジの一方を有する画像を生成すること、第1の割合と第2の割合がほぼ等しく、この制御装置が生成する画像が、エンハンスされた空間解像度を有すること、あるいは、第1の割合と第2の割合はほぼ等しいとは言えず、この制御装置が生成する画像がエンハンスされたダイナミック・レンジを有することを特徴とする。いくつかの態様では、第1の割合と第2の割合は、ほぼ等しくすることができ、第1の割合が、受光した光の約50パーセントとすることができ、第2の割合が、受光した割合の約50パーセントとすることができること、ビーム・スプリッタおよび表面が、第1の光路長が依然として第2の光路長とほぼ等しいままとなるようにして、第1の画像取込みセンサによって取り込まれた画像を第2の画像取込みセンサによって取り込まれた画像からオフセットするように位置決めすることができること、および/または、この装置が、第1の画像取込みセンサによって取り込まれた第1の画像中の第1の画素をサンプリングし、第2の画像取込みセンサによって取り込まれる第1の画素に対応する第2の画素をサンプリングし、第1および第2の画像取込みセンサによって取り込まれた画像より高い見かけの解像度を有する画像の画素を生成するように構成された、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができることを特徴とする。いくつかの態様では、第1の割合と第2の割合が等しくなく、第1の割合は、第1の画像取込みセンサのダイナミック・レンジに基づく。いくつかの態様では、第1の割合は、受光した光の約N%であり、第2の割合は、受光した光の約M%であり、NおよびMは正の数であり、100パーセントからN%を引くとM%とほぼ等しくなり、N%は、第1の画像取込みセンサのダイナミック・レンジに基づいて選択され、この装置は、第1および第2の画像取り込みセンサに結合された制御装置をさらに含んでおり、第1の画像取込みセンサによって取り込まれた画像中の画素をサンプリングし、第2の画像取込みセンサによって取り込まれた画像中のそれに対応する画素をサンプリングし、サンプリングした画素を用いて出力画像の画素を生成し、この出力画像は、単一の画像取込みセンサによって取り込まれた画像より高いダイナミック・レンジを有する。
装置は、第1の画像取込みセンサ面を含む第1の画像取込みセンサと、第2の画像取込みセンサ面を含む第2の画像取込みセンサと、複数の色成分を含む光を受光するように位置決めされたプリズム・アセンブリであり、受光した光がビーム・スプリッタに進入する遠位面、複数の色成分のうちの1つの色成分を反射し、複数の色成分のうちの他の色成分を透過させるように構成されたビーム・スプリッタ、上記の1つの色成分を第1の画像取込みセンサに向けて送るように構成された表面を含むプリズム・アセンブリと、受光した光の第2の部分を受光し、上記の他の色成分を第2の画像取込みセンサに向けて送るように位置決めされた反射ユニットとを含み、遠位面から第1のセンサ面までの第1の光路長は、遠位面から第2のセンサ面までの第2の光路長とほぼ等しい。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。いくつかの態様では、第1の画像取込みセンサは、モノクロ画像取込みセンサを含むことができ、第2の画像取込みセンサは、複数の色成分のうちの上記の他の色成分用のカラー・フィルタ・アレイを有する画像取込みセンサを含むことができ、複数の色成分のうちの上記の1つが緑色成分であり、複数の色成分のうちの上記の他の色成分が赤色成分および青色成分であること、カラー・フィルタ・アレイが、赤および青の画素のチェッカボードとすることができること、および/または、この装置が、複数の色成分のうちの上記の1つではフル空間解像度を有し、複数の色成分のうちの上記の他の色成分ではそれより低減された空間解像度を有し、カラー画像取込みセンサによって取り込まれた画像より改善された空間解像度および鮮鋭度を有する画像を生成するように構成された、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができることを特徴とする。
方法は、共通の前端部光学系から受光した光の第1の割合から、第1の画像を、画像取込みユニットの第1の画像取込みセンサで取り込むステップと、共通の前端部光学系から受光した光の第2の割合から、第2の画像を、画像取込みユニットの第2の画像取込みセンサで取り込むステップであり、画像取込みユニット内での第1の画像取込みセンサまでの第1の光路長が画像取込みユニット内での第2の画像取込みセンサまでの第2の光路長とほぼ等しいステップと、第1の画像から得られる情報と第2の画像から得られる情報とを結合して、単一の画像取込みセンサによって取り込まれた画像よりエンハンスされた空間解像度およびエンハンスされたダイナミック・レンジの一方を有する画像を生成するステップとを含むことができる。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。
装置は、第1の画像取込みセンサ面を含む第1の画像取込みセンサと、第2の画像取込みセンサ面を含む第2の画像取込みセンサと、光を受光するように位置決めされたプリズム・アセンブリであり、受光した光がプリズム・アセンブリに進入する遠位面、第1の光成分のセットを受光した光の第1の部分として反射し、第2の光成分のセットを受光した光の第2の部分として通過させる複数のノッチ・フィルタを含むビーム・スプリッタ、および受光した光の第1の部分を第1の画像取込みセンサに向けて送るように構成された表面を含むプリズム・アセンブリと、受光した光の第2の部分を受光し、受光した光の第2の部分を第2の画像取込みセンサに向けて送るように位置決めされた反射ユニットとを含み、遠位面から第1のセンサ面までの第1の光路長が、遠位面から第2のセンサ面までの第2の光路長とほぼ等しい。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。いくつかの態様では、第1の画像取込みセンサおよび第2の画像取込みセンサは、1つの画像取込みセンサ・チップの異なる領域を構成することができる。いくつかの態様では、この装置は、第1の画像取込みセンサおよび第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを有する遠位端部を含む内視鏡を有することができる。いくつかの態様では、この装置は、遠位端部、1対のチャネル、ならびに複数の第1および第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを含む立体視内視鏡をさらに含むことができ、第1の画像取込みセンサ、第2の画像取込みセンサ、プリズム・アセンブリおよび反射ユニットを複数含み、1対のチャネルの各チャネルは、立体視内視鏡の遠位端部に、異なる第1の画像取込みセンサ、異なる第2の画像取込みセンサ、異なるプリズム・アセンブリおよび異なる反射ユニットを複数含む。いくつかの態様では、プリズム・アセンブリは、ペンタプリズムを含むことができる。いくつかの態様では、この装置は、プリズム・アセンブリの遠位に位置決めされた遮蔽体をさらに含むことができる。いくつかの態様では、第1および第2の画像取込みセンサは、カラー・センサを含むことができ、および/または、この装置は、複数の色成分を含む出力光を生成する照明器をさらに含むことができ、および/または、この装置は、第1の画像取込みセンサによって取り込まれた第1の画像のモザイク解除処理された画像を受信し、第2の画像取込みセンサによって取り込まれた第2の画像のモザイク解除処理された画像を受信し、第1の画像中の対応する画素の色成分ベクトルおよび第2の画像中の対応する画素の色成分ベクトルから出力画像中の画素のN要素色成分ベクトルを生成するように構成された、第1および第2の画像取込みセンサに結合された色補正モジュールをさらに含むことができ、Nが最低でも3である。いくつかの態様では、第1および第2の画像取込みセンサは、カラー・センサを含むことができ、各カラー・センサは、赤/緑/緑/青のベイヤー・カラー・フィルタ・アレイを含み、この装置は、第1の赤色成分出力照明を生成する第1のレーザ照明源と、第1の赤色成分出力照明とは異なる第2の赤色成分出力照明を生成する第2のレーザ照明源と、第1の緑色成分出力照明を生成する第3のレーザ照明源と、第1の緑色成分出力照明とは異なる第2の緑色成分出力照明を生成する第4のレーザ照明源と、第1の青色成分出力照明を生成する第5のレーザ照明源と、第1の青色成分出力照明とは異なる第2の青色成分出力照明を生成する第6のレーザ照明源とを含む照明器をさらに含むことができる。いくつかの態様では、複数のノッチ・フィルタは、第1の赤色光成分、第1の緑色光成分、および第1の青色光成分を、受光した光の第1の部分として反射することができ、複数のノッチ・フィルタは、第2の赤色光成分、第2の緑色光成分、および第2の青色光成分を、受光した光の第2の部分として通過させることができる。いくつかの態様では、この装置は、第1の画像取込みセンサによって取り込まれた第1の画像のモザイク解除処理された画像を受信し、第2の画像取込みセンサによって取り込まれた第2の画像のモザイク解除処理された画像を受信し、第1の画像中の対応する画素の3色成分ベクトルおよび第2の画像中の対応する画素の3色成分ベクトルから出力画像中の画素の6要素色成分ベクトルを生成するように構成された、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができ、さらに、いくつかの態様では、広帯域白色光照明器も含むことができる。いくつかの態様では、複数のノッチ・フィルタは、受光した光の赤色成分の第1の部分、緑色成分の第1の部分および青色成分の第1の部分を反射し、受光した光の赤色成分の第2の部分、緑色成分の第2の成分、および青色成分の第2の部分を通過させることができる。いくつかの態様では、この装置は、第1の画像取込みセンサによって取り込まれた第1の画像のモザイク解除処理された画像を受信し、第2の画像取込みセンサによって取り込まれた第2の画像のモザイク解除処理された画像を受信し、第1の画像中の対応する画素の3色成分ベクトルおよび第2の画像中の対応する画素の色成分ベクトルから出力画像中の画素のN要素色を生成するように構成された、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができ、ここでNは3から6の範囲の整数であり、また、この装置は、各画素についてN要素色成分ベクトルを受信するように構成された、制御装置に結合されたディスプレイをさらに含むことができる。いくつかの態様では、この装置は、プリズム・アセンブリの遠位に位置決めされたレンズ系をさらに含むことができ、このレンズ系は、そのレンズ系から異なる距離のところに異なる波長の光を合焦させるように構成される。いくつかの態様では、この装置は、第1の画像取込みセンサによって取り込まれた第1の画像および第2の画像取込みセンサによって取り込まれた第2の画像にデジタル・フィルタ・カーネルを適用して第3および第4の画像を生成し、第3および第4の画像をモザイク解除処理し、モザイク解除処理された第3の画像中の対応する画素の色成分ベクトルおよびモザイク解除処理された第4の画像中の対応する画素の色成分ベクトルから出力画像中の画素のN要素色成分ベクトルを生成するように構成された、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができる。ここで、Nは3から6の範囲の整数である。いくつかの態様では、この装置は、赤色成分出力照明を生成する第1のレーザ照明源と、緑色成分出力照明を生成する第2のレーザ照明源と、青色成分出力照明を生成する第3のレーザ照明源とを含む照明器をさらに含むことができ、いくつかの態様では、複数のノッチ・フィルタは、赤色光成分、緑色光成分および青色光成分を受光した光の第1の部分として反射し、蛍光を通過させ、またいくつかの態様では、この装置は、第1の画像中の対応する画素の色成分ベクトルおよび第2の画像中の対応する画素の色成分ベクトルから出力画像中の画素の4要素色成分ベクトルを生成するように構成された、第1および第2の画像取込みセンサに結合された制御装置をさらに含むことができ、また、4要素色成分ベクトルの要素のうち3つの要素は可視カラー画像用であり、4要素色成分ベクトルの要素のうち第4の要素は蛍光画像用であり、またいくつかの態様では、第1および第2の画像取込みセンサはそれぞれ、赤/緑/緑/青のベイヤー・カラー・フィルタ・アレイを含むカラー・センサを含み、またいくつかの態様では、照明器は、蛍光励起光源をさらに含むことができ、この装置は、受光した光に含まれる蛍光励起光源からの光を阻止するために取り付けられたフィルタをさらに含むことができ、またいくつかの態様では、この蛍光は、複数の蛍光に含めることができ、各蛍光が異なる色を構成する。
方法は、共通の前端部光学系を通して受光した光を、画像取込みユニットの複数のノッチ・フィルタによって第1の複数の光成分と第2の複数の光成分とに分離するステップと、第1の複数の光成分から、第1の画像を、画像取込みユニットの第1の画像取込みセンサで取り込むステップと、第2の複数の光成分から、第2の画像を、画像取込みユニットの第2の画像取込みセンサで取り込むステップであり、画像取込みユニット内での第1の画像取込みセンサまでの第1の光路長が画像取込みユニット内での第2の画像取込みセンサまでの第2の光路長とほぼ等しいステップと、第1の画像中の対応する画素の色成分ベクトルおよび第2の画像中の対応する画素の色成分ベクトルから出力画像中の画素のN要素色成分ベクトルを生成するステップとを含み、ここで、Nは最低でも3である。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。
装置は、第1の画像取込みセンサ面を含む第1の画像取込みセンサと、第2の画像取込みセンサ面を含む第2の画像取込みセンサと、光を受光するように位置決めされたプリズム・アセンブリであり、受光した光がプリズム・アセンブリに進入する遠位面、受光した光の第1の部分を反射し、受光した光の第2の部分を透過させるように構成されたビーム・スプリッタ、および受光した光の第1の部分を第1の画像取込みセンサに向けて送るように構成された表面を含むプリズム・アセンブリと、受光した光の第2の部分を受光し、受光した光の第2の部分を第2の画像取込みセンサに向けて送るように位置決めされた反射ユニットとを含み、遠位面から第1のセンサ面までの第1の光路長は、遠位面から第2のセンサ面までの第2の光路長より短く、第1の画像取込みセンサは、第1の物体距離のところに合焦した画像を取り込み、第2の画像取込みセンサは、第2の物体距離のところに合焦した画像を取り込む。いくつかの態様では、第1および第2の画像取込みセンサ面は、同一平面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。いくつかの態様では、第1の画像取込みセンサおよび第2の画像取込みセンサは、1つの画像取込みセンサ・チップの異なる領域を構成することができる。いくつかの態様では、この装置は、第1の画像取込みセンサおよび第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを有する遠位端部を含む内視鏡を有することができる。いくつかの態様では、この装置は、遠位端部、1対のチャネル、ならびに複数の第1および第2の画像取込みセンサと、プリズム・アセンブリと、反射ユニットとを有する立体視内視鏡をさらに含むことができ、第1の画像取込みセンサ、第2の画像取込みセンサ、プリズム・アセンブリおよび反射ユニットを複数含み、1対のチャネルの各チャネルは、立体視内視鏡の遠位端部に、異なる第1の画像取込みセンサ、異なる第2の画像取込みセンサ、異なるプリズム・アセンブリおよび異なる反射ユニットを複数含む。いくつかの態様では、プリズム・アセンブリは、ペンタプリズムを含むことができる。いくつかの態様では、この装置は、プリズム・アセンブリの遠位に位置決めされた遮蔽体をさらに含むことができる。いくつかの態様では、受光した光の第1の部分は、受光した光の第1の割合とすることができ、受光した光の第2の部分は、受光した光の第2の割合とすることができ、いくつかの態様では、第1の割合と第2の割合はほぼ等しく、またいくつかの態様では、100パーセントから第1の割合を引くと、第2の割合にほぼ等しくなり、またいくつかの態様では、第1の割合と第2の割合はほぼ等しいとは言えず、第1の割合は第2の割合より小さく、またいくつかの態様では、第1および第2の画像取込みセンサのうちの少なくとも一方は、カラー画像取込みセンサを含み、いくつかの態様では、この装置は、第1および第2の画像取込みセンサに結合されて第1および第2の画像を受信する制御装置をさらに含み、この制御装置は、第1および第2の画像から焦点の合った出力画像を自動的に生成するように構成され、さらに、いくつかの態様において、第1の画像中の第1の画素群をサンプリングし、第2の画像中の対応する第2の画素群をサンプリングし、第1の画素群および第2の画素群のうちの一方を出力画像用に選択するように構成され、また他の態様では、この装置は、第1および第2の画像取込みセンサに結合された制御装置をさらに含み、この制御装置は、第1の画像取込みセンサによって取り込まれた第1の画像および第2の画像取込みセンサによって取り込まれた第2の画像を取り出すように構成され、かつ第1および第2の画像から深さマップを生成するように構成され、さらに、いくつかの態様において、シーンの3次元表面を生成し、第1および第2の画像をこの3次元表面に投影してテクスチャ・マッピングしてテクスチャ処理された画像面を生成し、深さマップおよびテクスチャ処理された画像面から仮想カメラ点の新たな画像を生成するように構成され、その他の態様では、この装置は、遠位端部、1対のチャネル、ならびに複数の第1および第2の画像取込みセンサと、プリズム・アセンブリと、反射アセンブリとを有する立体視内視鏡をさらに含み、第1の画像取込みセンサ、第2の画像取込みセンサ、プリズム・アセンブリおよび反射ユニットを複数含み、1対のチャネルの各チャネルは、立体視内視鏡の遠位端部に、異なる第1の画像取込みセンサ、異なる第2の画像取込みセンサ、異なるプリズム・アセンブリおよび異なる反射ユニットを複数含み、いくつかの態様では、この装置は、上記の対のうちの第1のチャネル中の第1および第2の画像取込みセンサに結合されて第1および第2の取得画像を受信し、上記の対のうちの第2のチャネル中の第1および第2の画像取込みセンサに結合されて第3および第4の取得画像を受信する制御装置をさらに含み、この制御装置は、第1のチャネル用の第1のチャネルの深さマップを生成し、第2のチャネル用の第2のチャネルの深さマップを生成し、第1および第2のチャネルの深さマップに基づいてシーンの3次元表面を生成し、第1、第2、第3および第4の取得画像をこの3次元表面に投影してテクスチャ処理して、テクスチャ処理された画像面を生成し、テクスチャ処理された画像面から新たな仮想カメラ視点の新たな画像を生成するように構成される。
方法は、共通の前端部光学系から受光した光の一部から、第1の画像を、画像取込みユニットの第1の画像取込みセンサで取り込むステップと、共通の前端部光学系から受光した光の第2の部分から、第2の画像を、画像取込みユニットの第2の画像取込みセンサで取り込むステップとを含み、画像取込みユニット内での第1の画像取込みセンサまでの第1の光路長は、画像取込みユニット内での第2の画像取込みセンサまでの第2の光路長より短く、さらに、第1の画像から得られた情報と第2の画像から得られた情報とを結合して、拡大された被写界深度を有する焦点の合った画像を生成するステップを含む。いくつかの態様では、第1および第2の画像取込みセンサは、同一平面にあり、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にある。
方法は、共通の前端部光学系から受光した光の一部から、第1の画像を、画像取込みユニットの第1の画像取込みセンサで取り込むステップと、共通の前端部光学系から受光した光の第2の部分から、第2の画像を、画像取込みユニットの第2の画像取込みセンサで取り込むステップとを含み、画像取込みユニット内での第1の画像取込みセンサまでの第1の光路長は、画像取込みユニット内での第2の画像取込みセンサまでの第2の光路長より短く、さらに、第1の画像から得られた情報と第2の画像から得られた情報とを結合して、仮想カメラ視点からの画像を生成するステップを含む。いくつかの態様では、第1および第2の画像取込みセンサは、同一面にあってもよいし、あるいはそれぞれ実質的に平行で既知の距離だけ離間した第1および第2の平面内にあってもよい。いくつかの態様では、この方法は、表示されたシーンが時間経過とともに前後に揺れるように、1つのシーンの複数の仮想カメラ視点からの複数の画像を、非ステレオ・ディスプレイ・ユニット上に表示するステップをさらに含むことができる。
Claims (16)
- 装置であって、当該装置は、
第1の画像取込みセンサ面を含む第1の画像取込みセンサと、
第2の画像取込みセンサ面を含む第2の画像取込みセンサと、
光を受光するように位置決めされたプリズム・アセンブリであって、該プリズム・アセンブリは、
前記受光した光が前記プリズム・アセンブリに進入する遠位面と、
前記受光した光の偏光状態に基づいて前記受光した光の第1の部分を反射し、前記受光した光の偏光状態に基づいて前記受光した光の第2の部分を透過させるように構成されるビーム・スプリッタと、
前記受光した光の第1の部分を第1の画像取込みセンサに反射するように構成された表面であって、前記ビーム・スプリッタから分離された表面と、を含む、プリズム・アセンブリと、
前記受光した光の第2の部分を受光するように位置決めされ、且つ前記受光した光の第2の部分を第2の画像取込みセンサに向けて送るように構成された反射ユニットと、を有しており、
前記遠位面から第1の画像取込みセンサ面までの第1の光路長は、前記遠位面から第2の画像取込みセンサ面までの第2の光路長にほぼ等しい、
装置。 - 第1及び第2の画像取込みセンサ面は、同一平面上にある、請求項1に記載の装置。
- 第1のセンサ面は第1の面内にあり、第2のセンサ面は第2の面内にあり、第1及び第2の面は実質的に平行であり、且つ既知の距離だけ離れている、請求項1に記載の装置。
- 第1及び第2の画像取込みセンサ、前記プリズム・アセンブリ、及び前記反射ユニットを含む遠位端部を有する内視鏡を含む、請求項1に記載の装置。
- 前記プリズム・アセンブリ及び前記反射ユニットは単一の一体構造を含み、前記単一の一体構造はペンタプリズムを含む、請求項1に記載の装置。
- 前記ビーム・スプリッタは、45度よりも小さい入射角を有する、請求項1に記載の装置。
- 前記ビーム・スプリッタの遠位に位置決めされ、前記光が前記装置に進入する前記装置内の開口部に近接して位置決めされた遮蔽体と、
該遮蔽体と前記プリズム・アセンブリの遠位面との間に位置決めされた4分の1波長板と、をさらに有する、請求項1に記載の装置。 - 第1及び第2の画像取込みセンサに結合されるコントローラであって、第1の画像取込みセンサによって取り込まれた第1の画像と第2の画像取込みセンサによって取り込まれた第2の画像とを組み合わせて、前記受光した光の偏光の差に基づいて画像中のフィーチャの顕著性を高めた画像を生成する、コントローラをさらに有する、請求項1に記載の装置。
- 偏光を有する照明源をさらに含み、前記受光した光は、前記偏光とは異なる偏光を有する反射光と、前記偏光を有する反射光とを含む、請求項1に記載の装置。
- 非偏光照明源をさらに含み、前記受光した光は、反射非偏光光及び反射偏光光を含む、請求項1に記載の装置。
- 方法であって、当該方法は、
画像取込みユニットのビーム・スプリッタによって、共通の前端部光学系から受光した光を、偏光に基づいて、第1の偏光部分と第2の部分とに分離するステップと、
前記ビーム・スプリッタから離れた面によって、前記受光した光の第1の偏光部分を前記画像取込みユニットの第1の画像取込みセンサに反射するステップと、
前記画像取込みユニットの反射ユニットによって、前記光の第2の部分を前記画像取込みユニットの第2の画像取込みセンサに向けるステップと、
第1の画像取込みセンサにおいて、前記光の第1の偏光部分からの第1の画像を取り込むステップと、
前記画像取込みユニットの第2の画像取込みセンサにおいて、前記光の第2の部分から第2の画像を取り込むステップであって、前記共通の前端部光学系から第1の画像取込みセンサの第1の画像取込みセンサ面までの第1の光路長が、前記共通の前端部光学系から第1の画像取込みセンサの第2の画像取込みセンサ面までの第2の光路長にほぼ等しい、取り込むステップと、を含む、
方法。 - 第1及び第2の画像取込みセンサ面は、同一平面上にある、請求項11に記載の方法。
- 第1のセンサ面は第1の面内にあり、第2のセンサ面は第2の面内にあり、第1及び第2の面は実質的に平行であり、且つ既知の距離だけ離れている、請求項11に記載の方法。
- 第1の画像取込みセンサによって取り込まれた第1の画像と第2の画像取込みセンサによって取り込まれた第2の画像とを組み合わせて、前記受光した光の偏光の差に基づいて画像中のフィーチャの顕著性を高めた画像を生成するステップをさらに含む、請求項11に記載の方法。
- 偏光光でシーンに照明するステップをさらに含む、請求項11に記載の方法。
- 非偏光光でシーンを照明するステップをさらに含む、請求項11に記載の方法。
Applications Claiming Priority (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/209,158 US8784301B2 (en) | 2011-08-12 | 2011-08-12 | Image capture unit and method with an extended depth of field |
| US13/209,121 | 2011-08-12 | ||
| US13/209,041 | 2011-08-12 | ||
| US13/209,158 | 2011-08-12 | ||
| US13/209,084 US8734328B2 (en) | 2011-08-12 | 2011-08-12 | Increased resolution and dynamic range image capture unit in a surgical instrument and method |
| US13/208,982 | 2011-08-12 | ||
| US13/208,982 US8672838B2 (en) | 2011-08-12 | 2011-08-12 | Image capture unit in a surgical instrument |
| US13/209,121 US8684914B2 (en) | 2011-08-12 | 2011-08-12 | Image capture unit and an imaging pipeline with enhanced color performance in a surgical instrument and method |
| US13/209,084 | 2011-08-12 | ||
| US13/209,041 US8764633B2 (en) | 2011-08-12 | 2011-08-12 | Feature differentiation image capture unit and method in a surgical instrument |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014525180A Division JP6258201B2 (ja) | 2011-08-12 | 2012-08-10 | 外科手術器具の画像取込み装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019020224A Division JP6740401B2 (ja) | 2011-08-12 | 2019-02-07 | 外科手術器具の画像取込み装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017148657A true JP2017148657A (ja) | 2017-08-31 |
| JP6480508B2 JP6480508B2 (ja) | 2019-03-13 |
Family
ID=47715395
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014525180A Active JP6258201B2 (ja) | 2011-08-12 | 2012-08-10 | 外科手術器具の画像取込み装置 |
| JP2017114998A Active JP6480508B2 (ja) | 2011-08-12 | 2017-06-12 | 外科手術器具の画像取込み装置 |
| JP2019020224A Active JP6740401B2 (ja) | 2011-08-12 | 2019-02-07 | 外科手術器具の画像取込み装置 |
| JP2020124976A Active JP7169725B2 (ja) | 2011-08-12 | 2020-07-22 | 外科手術器具の画像取込み装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014525180A Active JP6258201B2 (ja) | 2011-08-12 | 2012-08-10 | 外科手術器具の画像取込み装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019020224A Active JP6740401B2 (ja) | 2011-08-12 | 2019-02-07 | 外科手術器具の画像取込み装置 |
| JP2020124976A Active JP7169725B2 (ja) | 2011-08-12 | 2020-07-22 | 外科手術器具の画像取込み装置 |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2741702B1 (ja) |
| JP (4) | JP6258201B2 (ja) |
| KR (7) | KR101971211B1 (ja) |
| CN (3) | CN103889353B (ja) |
| WO (1) | WO2013025530A1 (ja) |
Families Citing this family (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013206911A1 (de) * | 2013-04-17 | 2014-10-23 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zur stereoskopischen Darstellung von Bilddaten |
| TW201528775A (zh) | 2014-01-02 | 2015-07-16 | Ind Tech Res Inst | 景深圖校正方法及系統 |
| CN110174170A (zh) * | 2014-03-21 | 2019-08-27 | 海佩尔梅德影像有限公司 | 紧凑型光传感器 |
| WO2015176298A1 (en) | 2014-05-23 | 2015-11-26 | Covidien Lp | 3d laparoscopic image capture apparatus with a single image sensor |
| US20160029892A1 (en) * | 2014-07-30 | 2016-02-04 | Novartis Ag | Vital stain visualization in ophthalmic surgical procedures and associated devices, systems, and methods |
| TWI561773B (en) * | 2014-08-06 | 2016-12-11 | Delta Electronics Inc | Six-primary solid state illuminator and operating method using the same |
| WO2016059906A1 (ja) * | 2014-10-16 | 2016-04-21 | オリンパス株式会社 | 内視鏡装置 |
| JP6033505B2 (ja) * | 2014-11-21 | 2016-11-30 | オリンパス株式会社 | 撮像システム |
| DE102015217253A1 (de) * | 2015-09-10 | 2017-03-16 | Robert Bosch Gmbh | Umfelderfassungseinrichtung für ein Fahrzeug und Verfahren zum Erfassen eines Bilds mittels einer Umfelderfassungseinrichtung |
| EP3156761B1 (en) * | 2015-10-14 | 2020-12-30 | H4 Technologies Limited | Image acquisition and processing |
| CN105611276B (zh) * | 2015-12-22 | 2017-12-26 | 广州广康医疗科技股份有限公司 | 一种与达芬奇机器人配套使用的高清3d录直播系统 |
| US10257393B2 (en) | 2016-02-12 | 2019-04-09 | Contrast, Inc. | Devices and methods for high dynamic range video |
| US10264196B2 (en) * | 2016-02-12 | 2019-04-16 | Contrast, Inc. | Systems and methods for HDR video capture with a mobile device |
| JP2017148432A (ja) * | 2016-02-26 | 2017-08-31 | 富士フイルム株式会社 | 内視鏡用光源装置 |
| US11163169B2 (en) | 2016-06-07 | 2021-11-02 | Karl Storz Se & Co. Kg | Endoscope and imaging arrangement providing improved depth of field and resolution |
| US10324300B2 (en) | 2016-06-07 | 2019-06-18 | Karl Storz Se & Co. Kg | Endoscope and imaging arrangement providing depth of field |
| US11307430B2 (en) | 2016-06-07 | 2022-04-19 | Karl Storz Se & Co. Kg | Optical device and method for providing improved depth of field and resolution modes |
| US10992917B2 (en) * | 2016-06-17 | 2021-04-27 | Sony Corporation | Image processing device, image processing method, program, and image processing system that use parallax information |
| WO2018031441A1 (en) | 2016-08-09 | 2018-02-15 | Contrast, Inc. | Real-time hdr video for vehicle control |
| US11782256B2 (en) * | 2016-09-21 | 2023-10-10 | Omnivision Technologies, Inc. | Endoscope imager and associated method |
| NL2017973B1 (en) | 2016-12-09 | 2018-06-19 | Quest Photonic Devices B V | Dichroic prism assembly with four or five channels |
| CN110461203B (zh) | 2017-03-24 | 2021-12-21 | 奥林巴斯株式会社 | 内窥镜系统 |
| JP6463573B1 (ja) * | 2017-06-07 | 2019-02-06 | オリンパス株式会社 | 内視鏡撮像システム |
| WO2018230066A1 (ja) * | 2017-06-12 | 2018-12-20 | ソニー株式会社 | 医療用システム、医療用装置および制御方法 |
| US11699215B2 (en) | 2017-09-08 | 2023-07-11 | Sony Corporation | Imaging device, method and program for producing images of a scene having an extended depth of field with good contrast |
| WO2019152552A1 (en) * | 2018-01-31 | 2019-08-08 | Intuitive Surgical Operations, Inc. | Display with folded optical path |
| EP3557531A1 (en) * | 2018-04-18 | 2019-10-23 | Vision RT Limited | Camera monitoring system for monitoring a patient in a bore based medical system |
| CN108896545B (zh) * | 2018-05-09 | 2021-07-13 | 歌尔光学科技有限公司 | 涂胶检测方法、装置及计算机可读存储介质 |
| US10951888B2 (en) | 2018-06-04 | 2021-03-16 | Contrast, Inc. | Compressed high dynamic range video |
| CN108803228B (zh) * | 2018-06-15 | 2021-01-08 | 郭洪志 | 一种仿生摄像头三维立体成像系统和方法 |
| US10884263B2 (en) | 2018-08-01 | 2021-01-05 | Htc Corporation | Head-mounted display and imaging apparatus for displaying image thereof |
| CN109259717B (zh) * | 2018-08-27 | 2020-08-14 | 彭波 | 一种立体内窥镜及内窥镜测量方法 |
| DE102018122816B9 (de) * | 2018-09-18 | 2024-07-04 | Carl Zeiss Meditec Ag | Verfahren und Vorrichtung zum Bestimmen einer Eigenschaft eines Objekts |
| US12201272B2 (en) | 2019-03-25 | 2025-01-21 | Karl Storz Imaging, Inc. | Imaging apparatus and video endoscope providing improved depth of field and resolution |
| US11531112B2 (en) * | 2019-06-20 | 2022-12-20 | Cilag Gmbh International | Offset illumination of a scene using multiple emitters in a hyperspectral, fluorescence, and laser mapping imaging system |
| JP7352411B2 (ja) | 2019-08-22 | 2023-09-28 | キヤノン株式会社 | 撮像装置 |
| US20220395166A1 (en) * | 2019-11-22 | 2022-12-15 | Convergascent Llc | Utilization of multiple imagers and computational photography in endoscopy |
| US20230086111A1 (en) * | 2020-03-06 | 2023-03-23 | 270 Surgical Ltd. | A multi focal endoscope |
| CN111474140A (zh) * | 2020-03-23 | 2020-07-31 | 江苏大学 | 一种双通道正交相位显微成像采样系统 |
| EP4149340A1 (en) * | 2020-05-12 | 2023-03-22 | Covidien LP | Systems and methods for image mapping and fusion during surgical procedures |
| CN111766699A (zh) * | 2020-07-24 | 2020-10-13 | 重庆金山科技(集团)有限公司 | 成像装置及方法、内窥镜系统 |
| WO2022023157A1 (en) * | 2020-07-30 | 2022-02-03 | Interdigital Ce Patent Holdings, Sas | Debayering with multiple camera rotations |
| CN115917394A (zh) * | 2020-08-31 | 2023-04-04 | 索尼集团公司 | 医疗成像系统、医疗成像装置和操作方法 |
| WO2022243994A1 (en) * | 2021-05-19 | 2022-11-24 | 270 Surgical Ltd. | Distal tip of a multi camera medical imaging device |
| US11808935B2 (en) | 2021-10-12 | 2023-11-07 | Olympus Corporation | Endoscope and endoscope apparatus |
| DE102022105090B3 (de) | 2022-03-03 | 2023-06-29 | Schölly Fiberoptic GmbH | Stereoskopische Anordnung und Operationsmikroskop mit stereoskopischer Anordnung |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62174715A (ja) * | 1987-01-24 | 1987-07-31 | Olympus Optical Co Ltd | 内視鏡装置 |
| JPS63210813A (ja) * | 1987-02-27 | 1988-09-01 | Olympus Optical Co Ltd | ビデオスコ−プ装置 |
| US4873572A (en) * | 1987-02-27 | 1989-10-10 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus |
| JPH05341205A (ja) * | 1992-06-09 | 1993-12-24 | Olympus Optical Co Ltd | 立体視内視鏡 |
| JP2003047588A (ja) * | 2001-08-03 | 2003-02-18 | Olympus Optical Co Ltd | 内視鏡装置 |
| JP2004313523A (ja) * | 2003-04-17 | 2004-11-11 | Pentax Corp | 固体撮像素子、電子内視鏡 |
| JP2005176940A (ja) * | 2003-12-16 | 2005-07-07 | Olympus Corp | 電子内視鏡 |
| JP2010082040A (ja) * | 2008-09-30 | 2010-04-15 | Fujifilm Corp | 内視鏡システム |
| JP2011062378A (ja) * | 2009-09-18 | 2011-03-31 | Fujifilm Corp | 内視鏡システム |
| JP2011120916A (ja) * | 2000-04-10 | 2011-06-23 | C2Cure Inc | 医療用画像形成のためのシステム |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4074306A (en) * | 1975-07-28 | 1978-02-14 | Olympus Optical Co., Ltd. | Endoscope utilizing color television and fiber optics techniques |
| JPH01122274A (ja) * | 1987-11-06 | 1989-05-15 | Fujitsu Ltd | 撮像装置 |
| JP3628717B2 (ja) * | 1994-03-17 | 2005-03-16 | オリンパス株式会社 | 立体視内視鏡 |
| US5743846A (en) * | 1994-03-17 | 1998-04-28 | Olympus Optical Co., Ltd. | Stereoscopic endoscope objective lens system having a plurality of front lens groups and one common rear lens group |
| JPH10118004A (ja) * | 1996-10-24 | 1998-05-12 | Fuji Photo Film Co Ltd | 蛍光撮像装置 |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6659939B2 (en) | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| JP2000221411A (ja) * | 1999-01-29 | 2000-08-11 | Fuji Photo Optical Co Ltd | 偽似カラー表示可能な電子内視鏡装置 |
| WO2002007587A2 (en) * | 2000-07-14 | 2002-01-31 | Xillix Technologies Corporation | Compact fluorescent endoscopy video system |
| US7101334B2 (en) * | 2001-10-31 | 2006-09-05 | Olympus Corporation | Optical observation device and 3-D image input optical system therefor |
| US20070182844A1 (en) * | 2003-03-09 | 2007-08-09 | Latia Imaging Pty Ltd | Optical system for producing differently focused images |
| JP2005182521A (ja) * | 2003-12-19 | 2005-07-07 | Matsushita Electric Ind Co Ltd | 虹彩撮像カメラおよび虹彩認証システム |
| JP2005244549A (ja) * | 2004-02-26 | 2005-09-08 | Matsushita Electric Ind Co Ltd | 認証用画像撮像装置 |
| US20060241495A1 (en) * | 2005-03-23 | 2006-10-26 | Eastman Kodak Company | Wound healing monitoring and treatment |
| JP5086535B2 (ja) * | 2005-11-21 | 2012-11-28 | オリンパスメディカルシステムズ株式会社 | 2板撮像装置 |
| DE102006034205B4 (de) * | 2006-07-25 | 2012-03-01 | Carl Mahr Holding Gmbh | Dynamische Bildaufnahme mit bildgebenden Sensoren |
| US8814779B2 (en) * | 2006-12-21 | 2014-08-26 | Intuitive Surgical Operations, Inc. | Stereoscopic endoscope |
| JP5448353B2 (ja) * | 2007-05-02 | 2014-03-19 | キヤノン株式会社 | 光干渉断層計を用いた画像形成方法、及び光干渉断層装置 |
| US20090131800A1 (en) * | 2007-11-15 | 2009-05-21 | Carestream Health, Inc. | Multimodal imaging system for tissue imaging |
| JP5631299B2 (ja) * | 2008-03-28 | 2014-11-26 | コントラスト オプティカル デザイン アンド エンジニアリング,インク. | 全ビーム画像スプリッタシステム |
| US20100165080A1 (en) * | 2008-12-26 | 2010-07-01 | Fujifilm Corporation | Image capturing apparatus and endoscope |
| JP5443802B2 (ja) * | 2009-03-24 | 2014-03-19 | オリンパス株式会社 | 蛍光観察装置 |
-
2012
- 2012-08-10 CN CN201280050585.7A patent/CN103889353B/zh active Active
- 2012-08-10 KR KR1020147006103A patent/KR101971211B1/ko active IP Right Grant
- 2012-08-10 KR KR1020217020786A patent/KR102390141B1/ko active IP Right Grant
- 2012-08-10 EP EP12824330.0A patent/EP2741702B1/en active Active
- 2012-08-10 JP JP2014525180A patent/JP6258201B2/ja active Active
- 2012-08-10 CN CN202011093468.1A patent/CN112220438B/zh active Active
- 2012-08-10 KR KR1020207029014A patent/KR102274896B1/ko active IP Right Grant
- 2012-08-10 KR KR1020197010909A patent/KR102079689B1/ko active IP Right Grant
- 2012-08-10 WO PCT/US2012/050394 patent/WO2013025530A1/en unknown
- 2012-08-10 KR KR1020237015005A patent/KR20230062898A/ko not_active Application Discontinuation
- 2012-08-10 KR KR1020207004427A patent/KR102166302B1/ko active IP Right Grant
- 2012-08-10 KR KR1020227012984A patent/KR102529996B1/ko active IP Right Grant
- 2012-08-10 CN CN201710214001.XA patent/CN107913053B/zh active Active
-
2017
- 2017-06-12 JP JP2017114998A patent/JP6480508B2/ja active Active
-
2019
- 2019-02-07 JP JP2019020224A patent/JP6740401B2/ja active Active
-
2020
- 2020-07-22 JP JP2020124976A patent/JP7169725B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62174715A (ja) * | 1987-01-24 | 1987-07-31 | Olympus Optical Co Ltd | 内視鏡装置 |
| JPS63210813A (ja) * | 1987-02-27 | 1988-09-01 | Olympus Optical Co Ltd | ビデオスコ−プ装置 |
| US4873572A (en) * | 1987-02-27 | 1989-10-10 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus |
| JPH05341205A (ja) * | 1992-06-09 | 1993-12-24 | Olympus Optical Co Ltd | 立体視内視鏡 |
| JP2011120916A (ja) * | 2000-04-10 | 2011-06-23 | C2Cure Inc | 医療用画像形成のためのシステム |
| JP2003047588A (ja) * | 2001-08-03 | 2003-02-18 | Olympus Optical Co Ltd | 内視鏡装置 |
| JP2004313523A (ja) * | 2003-04-17 | 2004-11-11 | Pentax Corp | 固体撮像素子、電子内視鏡 |
| JP2005176940A (ja) * | 2003-12-16 | 2005-07-07 | Olympus Corp | 電子内視鏡 |
| JP2010082040A (ja) * | 2008-09-30 | 2010-04-15 | Fujifilm Corp | 内視鏡システム |
| JP2011062378A (ja) * | 2009-09-18 | 2011-03-31 | Fujifilm Corp | 内視鏡システム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107913053B (zh) | 2020-10-30 |
| KR20200019779A (ko) | 2020-02-24 |
| JP6480508B2 (ja) | 2019-03-13 |
| KR102166302B1 (ko) | 2020-10-16 |
| KR102390141B1 (ko) | 2022-04-25 |
| KR102079689B1 (ko) | 2020-02-20 |
| JP6740401B2 (ja) | 2020-08-12 |
| CN112220438A (zh) | 2021-01-15 |
| KR102274896B1 (ko) | 2021-07-09 |
| JP2020168569A (ja) | 2020-10-15 |
| EP2741702B1 (en) | 2022-10-19 |
| CN112220438B (zh) | 2024-02-06 |
| KR20220057635A (ko) | 2022-05-09 |
| KR20230062898A (ko) | 2023-05-09 |
| CN107913053A (zh) | 2018-04-17 |
| JP6258201B2 (ja) | 2018-01-10 |
| EP2741702A1 (en) | 2014-06-18 |
| JP2014524290A (ja) | 2014-09-22 |
| KR102529996B1 (ko) | 2023-05-08 |
| KR101971211B1 (ko) | 2019-04-23 |
| KR20140050712A (ko) | 2014-04-29 |
| CN103889353B (zh) | 2017-05-03 |
| JP2019072557A (ja) | 2019-05-16 |
| KR20200119901A (ko) | 2020-10-20 |
| KR20210087564A (ko) | 2021-07-12 |
| KR20190047066A (ko) | 2019-05-07 |
| JP7169725B2 (ja) | 2022-11-11 |
| WO2013025530A1 (en) | 2013-02-21 |
| EP2741702A4 (en) | 2016-02-24 |
| CN103889353A (zh) | 2014-06-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6480508B2 (ja) | 外科手術器具の画像取込み装置 | |
| US20210204803A1 (en) | Image capture unit in a surgical instrument | |
| US10809519B2 (en) | Increased resolution and dynamic range image capture unit in a surgical instrument and method | |
| US9782056B2 (en) | Image capture unit and method with an extended depth of field | |
| US9254076B2 (en) | Feature differentiation image capture unit and method in a surgical instrument | |
| US8684914B2 (en) | Image capture unit and an imaging pipeline with enhanced color performance in a surgical instrument and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180823 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6480508 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |