JP2017148180A - ミシン - Google Patents
ミシン Download PDFInfo
- Publication number
- JP2017148180A JP2017148180A JP2016032255A JP2016032255A JP2017148180A JP 2017148180 A JP2017148180 A JP 2017148180A JP 2016032255 A JP2016032255 A JP 2016032255A JP 2016032255 A JP2016032255 A JP 2016032255A JP 2017148180 A JP2017148180 A JP 2017148180A
- Authority
- JP
- Japan
- Prior art keywords
- clamp
- sewing machine
- sewing
- jig
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B15/00—Machines for sewing leather goods
- D05B15/02—Shoe sewing machines
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B15/00—Machines for sewing leather goods
- D05B15/02—Shoe sewing machines
- D05B15/06—Welt sewing machines
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B3/00—Sewing apparatus or machines with mechanism for lateral movement of the needle or the work or both for making ornamental pattern seams, for sewing buttonholes, for reinforcing openings, or for fastening articles, e.g. buttons, by sewing
- D05B3/10—Sewing apparatus or machines with mechanism for lateral movement of the needle or the work or both for making ornamental pattern seams, for sewing buttonholes, for reinforcing openings, or for fastening articles, e.g. buttons, by sewing for making piped openings
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B3/00—Sewing apparatus or machines with mechanism for lateral movement of the needle or the work or both for making ornamental pattern seams, for sewing buttonholes, for reinforcing openings, or for fastening articles, e.g. buttons, by sewing
- D05B3/12—Sewing apparatus or machines with mechanism for lateral movement of the needle or the work or both for making ornamental pattern seams, for sewing buttonholes, for reinforcing openings, or for fastening articles, e.g. buttons, by sewing for fastening articles by sewing
- D05B3/20—Sewing apparatus or machines with mechanism for lateral movement of the needle or the work or both for making ornamental pattern seams, for sewing buttonholes, for reinforcing openings, or for fastening articles, e.g. buttons, by sewing for fastening articles by sewing labels
Abstract
Description
靴のアッパーの踵部分は、足の踵の形状に合わせて曲面形状に仕上げる必要があるが、アッパーを湾曲させた状態で縫製するためには、縫い位置の両側の生地を湾曲させることができるように、釜及び針板がミシンベッド部の上面から上方に立設されたいわゆるポストベッドミシンが使用されていた。
しかし、所定のパターンに従って自動送りで縫製を行うミシンは、平面上に被縫製物を載置し、平面座標に従って被縫製物を一針ごとに移動させて縫製を行うものが一般的であり、靴のアッパーのような曲面形状の縫製に対応することはできなかった。
また、上記従来のミシンは、円筒状の支持体を回転させることは可能だが、支持体を回転中心線に沿って移動させることができず、周面上に自在に縫製を行うことができないという問題があった。
湾曲した曲面に沿わせて被縫製物を保持するクランプ保持具を、前記湾曲した曲面の内側に位置する軸線回りに揺動させる揺動機構を備えるミシンにおいて、
前記揺動機構は、前記軸線回りに回転可能に支持された回動軸と、
前記クランプ保持具の揺動の駆動源となる揺動モーターと、
前記揺動モーターから前記回動軸に動力を伝える伝達機構とを有し、
前記回動軸と前記揺動モーターと前記伝達機構が何れもミシンフレームに支持されていることを特徴とする。
前記回動軸はミシンの立胴部を貫通して配置されていることを特徴とする。
前記クランプ保持具の揺動する軸線に沿って当該クランプ保持具と針棒を相対的に移動させる軸線移動機構と、
前記揺動機構の駆動源と前記軸線移動機構の駆動源とを制御して前記被縫製物の任意の位置に針落ちを行う制御装置とを備えることを特徴とする。
前記軸線移動機構が前記ミシンフレームに支持されていることを特徴とすることを特徴とする。
前記クランプ保持具はミシンに対して着脱可能であることを特徴とする。
ミシンは、メンテナンスの際には、例えば、ミシンフレームの側縁部に設けられた支点を中心に傾倒させて、ミシンフレームの底部を覗くことができる状態とするが、このように場合に、揺動機構の各構成がミシンフレームと共に傾倒し、当該傾倒の妨げとならないので、その対処作業を不要とし、メンテナンスの作業性の向上を図ることが可能となる。
以下、本発明の実施の形態であるミシン100、クランプ治具30及びクランプ補助装置50について図面に基づいて説明する。
上記ミシン100は、曲面を有する被縫製物の保持に適したクランプ保持具としてのクランプ治具30を用いて、所定の縫製パターンに従って任意の位置に針落ちを行う自動縫いミシンであり、クランプ補助装置50はクランプ治具30に被縫製物Cを装着する作業を補助する装置である。
図1はクランプ治具30の正面図、図2は平面図、図3は右側面図、図4は背面図である。
クランプ治具30は、後述するY軸方向に沿って並んで配置され、被縫製物Cをクランプする三つのクランプユニット40A,40B,40Bと、各クランプユニット40A,40B,40Bを支持するフレーム31とを備えている。
また、中央のクランプユニット40Aと両側のクランプユニット40B,40Bは、基本構造が一致するので、主にクランプユニット40Aについて説明し、クランプユニット40Bについてはクランプユニット40Aと異なる点のみを説明する。
また、上記クランプ治具30のフレーム31は、所定形状の平板であり、その平板面に平行であって互いに直交する一の方向をY軸方向、他の方向をZ軸方向とし、Y軸方向の一方を「左」、他方を「右」とし、Z軸方向の一方を「上」、他方を「下」とする。また、フレーム31の平板面に直交する方向をX軸方向とし、その一方(図1紙面手前側)を「前」、他方(図1紙面奥側)を「後」とする。
各クランプユニット40A,40B,40Bは、いずれも、フレーム31の前面側に装備されている。
そして、クランプユニット40Aは、被縫製物Cの上側に配置される左右一対の上側クランプ部材41A,41Aと、被縫製物Cの下側に配置される左右一対の下側クランプ部材42A,42Aと、上側クランプ部材41A及び下側クランプ部材42Aをクランプ位置と解放位置とに切り替え可能に支持する支持機構43Aと、支持機構43Aを支持する支持ブロック44Aとを備えている。
左右の下側クランプ部材42A,42Aは、左右方向について対称形状であり、いずれも、X軸方向に沿った長尺の板状部材であって、支持ブロック44Aから前方に向かって延出されている。さらに、下側クランプ部材42A,42Aの前端部は、それぞれ左右方向外側に向かって張り出された形状となっている。
つまり、これらのクランプユニット40A,40B,40Bの下側クランプ部材42A,42A,42B,42Bのクランプ面421A,421A,421B,421Bは、全て、同一の外周面に沿って並ぶように配置されている。
支持ブロック44Aは、図2に示すように、その左側に上下に貫通した二本の長穴442Aが左斜め前側に向かって平行に形成されており、一方の長穴442Aにはネジ441Aが通され、他方の長穴442Aには左側の下側クランプ部材42Aの上面に突設されたボス422Aが挿入されている。
また、支持ブロック44Aの右側には上下に貫通した二本の長穴442Aが右斜め前側に向かって前後に並んで形成されており、前側の長穴442Aにはネジ441Aが通され、後側の長穴442Aには右側の下側クランプ部材42Aの上面に突設されたボス422Aが挿入されている。
従って、ネジ441Aを緩めて、下側クランプ部材42A,42Aを支持ブロック44Aの下面に摺接させてX軸方向及びY軸方向に沿って移動させ、任意の位置でネジ441Aを締結することにより、下側クランプ部材42A,42Aの支持ブロック44Aに対する延出長さ及びY軸方向における相互の間隔を調節することが可能である。
左右の上側クランプ部材41A,41Aは、左右方向について対称形状であり、いずれも、X軸方向に沿った長尺の板状部材であって、支持機構43Aの可動ブロック45Aから前方に向かって延出されている。さらに、また、上側クランプ部材41A,41Aの前端部は、それぞれ左右方向外側に向かって張り出された形状となっている。
左右の上側クランプ部材41A,41Aは、その下面がいずれも、中心軸がX軸方向に向けられた同一の内周面に沿ったクランプ面411A,411Aから構成されており、Y軸方向における両端部に位置する二つのクランプユニット40B,40Bの上側クランプ部材41B,41Bも、上述の内周面に沿ったクランプ面411B,411Bから構成されている。
つまり、これらのクランプユニット40A,40B,40Bの上側クランプ部材41A,41A,41B,41Bのクランプ面411A,411A,411B,411Bは、全て、同一の内周面に沿って並ぶように配置されている。
可動ブロック45Aは、図2に示すように、その左側に上下に貫通した二本の長穴452Aが左斜め前側に向かって前後に並んで形成されており、前側の長穴452Aにはネジ451Aが通され、後側の長穴452Aには左側の上側クランプ部材41Aの上面に突設されたボス412Aが挿入されている。
また、可動ブロック45Aの右側には上下に貫通した二本の長穴452Aが右斜め前側に向かって前後に並んで形成されており、前側の長穴452Aにはネジ451Aが通され、後側の長穴452Aには右側の上側クランプ部材41Aの上面に突設されたボス412Aが挿入されている。
従って、ネジ451Aを緩めて、上側クランプ部材41A,41Aを可動ブロック45Aの下面に摺接させてX軸方向及びY軸方向に沿って移動させ、任意の位置でネジ451Aを締結することにより、上側クランプ部材41A,41Aの可動ブロック45Aに対する延出長さ及びY軸方向における相互の間隔を調節することが可能である。
図5は支持機構の側面図である。
支持機構43Aは、図3及び図5に示すように、上側クランプ部材41A,41Aを保持する可動ブロック45Aと、支持ブロック44Aの上面に固定装備された基部432と、回動操作により上側クランプ部材41Aを下側クランプ部材42Aと対向する保持位置と下側クランプ部材42Aから離間した解放位置とに切り替える操作レバー433と、可動ブロック45A及び支柱431,431を介して上側クランプ部材41Aを支持する回動腕434と、基部432と操作レバー433とを連結するリンク部材435と、クランプ補助装置50からの操作レバー433に対する切り替え操作の推力を入力する操作部材としての伝達体46とを備えている。
なお、上記「保持位置」とは下側クランプ部材42Aに対して上側クランプ部材41Aが被縫製物Cを挟持できる程度に近接した状態又はクランプ面同士が接した状態をいい、「解放位置」とは下側クランプ部材42Aに対して上側クランプ部材41Aが十分に上方に離間して対向すらしていない状態(90°近くまで開いた状態)を言うものとする。
操作レバー433は、その前端部が回動腕434の後端の上部とY軸回りに回動可能に連結され、後端部は保持位置と解放位置との切り替えを行うための入力操作部となっている。さらに、操作レバー433の前端部より幾分後方となる位置において、リンク部材435の他端部とY軸回りに回動可能に連結されている。
この構成において、操作レバー433の入力操作部を下方に回動させると、操作レバー433と回動腕434との連結点aとリンク部材435と基部432との連結点bを結ぶ直線よりも、操作レバー433とリンク部材435との連結点cが下側となる。かかる状態で上側クランプ部材41Aと下側クランプ部材42Aとの間に被縫製物Cをクランプしてその復元力で操作レバー433が押し戻されても、連結点cがより下方に移動する方向に力が加わり、操作レバー433と基部432とが当接して上側クランプ部材41Aと下側クランプ部材42Aの開きが阻止され、クランプ状態を維持することができる。
つまり、操作レバー433の入力操作部の下方回動により、上側クランプ部材41Aと下側クランプ部材42Aとが被縫製物Cを挟んで保持する保持位置に切り替えることができる。
つまり、操作レバー433の入力操作部の上方回動により、上側クランプ部材41Aを被縫製物Cの解放位置に切り替えることができる。
これらにより、支持機構43Aは、いわゆるトグル機構を構成している。
支持ブロック44Aの平板面は、X−Y平面に平行であり、直動軸462はZ軸方向に沿って往動可能となっている。
連結部材73Aは、一端部が開放された凹状の切り欠きからなる係止部734Aを備えており、当該係止部734Aの内側に被係止部462aを挿入することにより直動軸462との連結を可能としている。そして、当該連結状態において、クランプ補助装置50側からの直動軸462の上方及び下方への移動動作の入力を可能としている。
これにより、伝達体46を介して、クランプ補助装置50側からの上側クランプ部材41A及び下側クランプ部材42Aの保持位置と解放位置との切り替え操作を可能としている。
さらに、この支持ブロック44Aは、後端部にフレーム31の平板面に当接する端面部を有しており、当該端面部を密接させた状態でフレーム31にネジ止めによって支持されている。
左右のクランプユニット40B,40Bについて説明する。前述したように、左右のクランプユニット40B,40Bは左右方向ついて対称構造なので、ここでは右側のクランプユニット40Bのみについて説明し、左側のクランプユニット40Bについては説明を省略する。また、クランプユニット40Bについて、既に説明した中央のクランプユニット40Aと異なる点のみについて説明する。
従って、左右のクランプユニット40B,40Bは、その全ての構成が支持ブロック44B,44Bと同様に傾斜した向きとなっている。
また、クランプユニット40Bの支持ブロック44Bは下側クランプ部材42Bを固定保持し、支持ブロック44Bに対する下側クランプ部材42Bの位置調節は不能となっている。
同様に、支持機構43Bの可動ブロック45Bは上側クランプ部材41Bを固定保持し、可動ブロック45Bに対する上側クランプ部材41Bの位置調節も不能となっている。
なお、後述するが、フレーム31に対するクランプユニット40Bの位置調節は可能である。
フレーム31は、図4に示すように、Y軸方向に長尺な矩形の本体部32と、本体部32のY軸方向の両端部からそれぞれ左斜め下方と右斜め下方とに延出された二本の腕部33,33と、本体部32の中央下部から下方に延出された矩形の垂下部34とを有し、これらがY−Z平面に沿った一体的な平板状をなしている。
クランプ治具30は、ミシン100又はクランプ補助装置50が有する、長手方向がZ軸方向に沿った長尺矩形の取付板に、本体部32の中央部及び垂下部34の後面を接するように装着される。
左右一対の治具把持機構35,35は、上記取付板の上端部の後面を前方に押圧することにより、当該治具把持機構35,35とフレーム31の後面との間で把持することにより、取付板に対するクランプ治具30の固定を図るものである。
つまり、操作レバー353の入力操作部を前方に回動させると、操作レバー353と回動腕354との連結点とリンク部材355と基部352との連結点を結ぶ直線よりも、操作レバー353とリンク部材355との連結点が前側となる。かかる状態で把持パッド351が取付板を前方に押圧してフレーム31との間で把持した状態(把持位置)となる。
また、把持位置にある状態から操作レバー353の入力操作部を後方に回動させると、操作レバー353と回動腕354との連結点とリンク部材355と基部352との連結点を結ぶ直線よりも前方に位置していた操作レバー353とリンク部材355との連結点が当該直線よりも後方に移動する。これにより、把持パッド351が後方に移動し、取付板を解放した状態(解放位置)となる。
これにより、クランプ治具30を、ミシン100又はクランプ補助装置50の取付板に対して着脱可能としている。
上記フレーム31とクランプユニット40Bとの間には、フレーム31に対する二つのクランプユニット40Bの配置を調節する治具側調節機構47が設けられている。なお、中央のクランプユニット40Aは、フレーム31に固定的に装備され、位置調節は行われない。
なお、左右の腕部33,33及び各腕部33,33に設けられた上側取付穴471と下側取付穴472は、左右方向について対称となる形状なので、主に、左側の腕部33及び上側取付穴471と下側取付穴472について説明を行う。
そして、上側取付穴471の直線部471a,471b,471cは、フレーム31の下方に中心位置が設定された共通の円弧A1に沿って形成されている。
また、下側取付穴472の直線部472a,472bは、フレーム31の下方に中心位置が設定された共通の円弧A2に沿って形成されている。
また、この円弧A2は前述した円弧A1と同心であって当該円弧A1よりも小径に設定されている。さらに、各円弧A1,A2の中心は、前述したクランプユニット40A,40B,40Bの上側クランプ部材41A,41A,41B,41Bのクランプ面411A,411A,411B,411B及び下側クランプ部材42A,42A,42B,42Bのクランプ面421A,421A,421B,421Bがなす周面の中心軸線上に位置している(以下、この周面の中心軸線を「クランプ面の中心軸線」という)。
なお、上記上側取付穴471及び下側取付穴472は、複数の直線部からではなく、円弧A1又はA2に沿った一つの円弧状に形成しても良い。
図2〜4及び図6に示すように、治具側調節機構47は、上記上側取付穴471及び下側取付穴472に加えて、クランプユニット40Bの支持ブロック44Bの後端面から後方に突出した二本のボス473,473と、支持ブロック44Bをフレーム31に締結固定する手回しハンドルを有するネジ474とを備えている。
ネジ474は、支持ブロック44Bの後端面における円弧A2の線状となる位置に形成されたネジ穴476に対して、フレーム31の後面側から下側取付穴472に通されて座金475を介して螺入されている。
従って、クランプユニット40Bの位置調節の際には、手回しハンドルを回してネジ474を緩め、当該ネジ474とボス473,473により上側取付穴471及び下側取付穴472に沿って支持ブロック44Bを移動させることにより、円弧A1,A2に沿って任意に位置を調節することができる。そして、位置を決めると、再び、手回しハンドルを回してネジ474を締結し、その位置にクランプユニット40Bを固定することができる。
また、有底穴482の開口部はかしめられており、球体483は、ある程度外部に突出するが、脱落しないようになっている。
また、位置決め穴481に嵌合する部材は、球体483である場合に限らず、支持ブロック44Bの移動を許容する先端が丸みを帯びた突起でも良い。
また、複数の位置決め穴481を支持ブロック44Bの後端面に設け、有底穴482をフレーム31の前面側に設け、球体483とコイルバネ484を格納する構成としても良い。
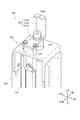
図7はクランプ補助装置50の斜視図、図8は正面図、図9は前側支持板62を外した正面図、図10はクランプ治具30を装着した状態の正面図、図11は小型の被縫製物Cに対応する調節を行った後のクランプ治具30を装着した状態のクランプ補助装置50の正面図である。
クランプ補助装置50は、クランプ治具30のフレーム31を支持する基台60と、クランプ治具30のクランプユニット40A,40B,40Bに対応して個別に設けられ、各クランプユニット40A,40B,40Bの上側クランプ部材41A,41B,41Bのクランプ位置と解放位置との切り替え動作の動力を付与する駆動ユニット70A,70B,70Bと、基台60に対する各駆動ユニット70B,70Bの配置を調節する補助装置側調節機構80,80と、各駆動ユニット70A,70B,70Bを制御する制御装置90とを備えている。
また、中央の駆動ユニット70Aと両側の駆動ユニット70B,70Bは、基本構造が一致するので、主に駆動ユニット70Aについて説明し、駆動ユニット70Bについては駆動ユニット70Aと異なる点のみを説明する。
また、クランプ補助装置50の各図におけるX軸方向、Y軸方向、Z軸方向については、クランプ補助装置50にクランプ治具30を装着した場合のクランプ治具30に定めたX軸方向、Y軸方向、Z軸方向を適用する。
基台60は、X−Y平面に沿った矩形平板状の底板61と、底板61の上面の前端部に立設された前側支持板62と、底板61の上面の後端部に立設された後側支持板63と、後側支持板63の前面上部中央に固定装備されたクランプ治具30の取付板64とを備えている。
四つの突起643,643,643,643は、取付板64の前面において前方に突出して設けられ、垂下部34のY軸方向の幅にほぼ等しい間隔でY軸方向に離間して配置された二つの突起643,643が上下に二組配置されている。
この下端支持部材644により、取付板64にクランプ治具30を装着する際に、垂下部34の下端部が下端支持部材644の上面に当接し、クランプ治具30をZ軸方向について適正に位置決めすることができる。
図12は駆動ユニット70Aの斜視図である。
図7〜9及び図12に示すように、基台60においてY軸方向における中央に配置された駆動ユニット70Aは、クランプ治具30のクランプユニット40Aの上側クランプ部材41Aのクランプ位置と解放位置との切り替え動作を入力するための駆動源となるアクチュエーターとしてのエアシリンダー71Aと、エアシリンダー71Aのプランジャーを上方に向けた状態で支持する支持フレーム72Aと、エアシリンダー71Aのプランジャーに装備された連結部材73Aとを備えている。
そして、支持フレーム72Aの内側にエアシリンダー71Aが格納保持され、支持フレーム72Aの上端面に穿設された開口部からプランジャーが上方に向かって突出している。
従って、クランプ治具30をクランプ補助装置50に装着する際には、エアシリンダー71Aのシリンダ内部が解放されて、プランジャーはフリー状態(上下に拘束されていない状態)にあるので、連結部材73Aを手動で昇降させることで容易に連結することができる。
図13は駆動ユニット70Bの斜視図である。
左右の駆動ユニット70B,70Bは左右対称構造なので、ここでは左側の駆動ユニット70Bについて説明し、右側の駆動ユニット70Bについては説明を省略する。
図7〜9に示すように、基台60において駆動ユニット70Aの左側に配置された駆動ユニット70Bは、クランプ治具30の左側のクランプユニット40Bの上側クランプ部材41Bのクランプ位置と解放位置との切り替え動作を入力するための駆動源となるアクチュエーターとしてのエアシリンダー71Bと、エアシリンダー71Bのプランジャーを右斜め下側に向けた状態で支持する支持フレーム72Bと、エアシリンダー71Bのプランジャーに装備された可動ブロック74Bと、可動ブロック74Bに支持された連結部材73Bとを備えている。
駆動ユニット70Bは、補助装置側調節機構80によりX軸回りに角度調節を行うことが可能だが、支持部721Bが上記のようにエアシリンダー71Bをほぼ逆さまにして支持することにより、プランジャーを上向きにして配置された隣の駆動ユニット70Aのエアシリンダー71Aとの干渉を回避することができ、駆動ユニット70A,70Bを近接させて配置することができるので、装置全体の小型化に寄与している。
そして、前面部722Bの右下の端部から延出された回動支持腕724Bは、当該前面部722Bと一体的な平板からなり、その延出端部は、前側支持板62に設けられた支軸部621によりX軸回りに回動可能に支持されている。支軸部621は、回動支持腕724Bを介して駆動ユニット70B全体を回動可能に支持すると共に、その回動中心線は、取付板64にクランプ治具30が装着された状態において、当該クランプ治具30のクランプ面の中心軸線と一致する配置となっている。
また、後述する補助装置側調節機構80も、同じ回動中心線回りに駆動ユニット70Bを回動させて位置調節を行う構造なので、回動支持腕724Bにより、駆動ユニット70Bは安定的に回動動作を行うことができ、その位置調節を円滑に行うことができる。
なお、クランプユニット40Bと駆動ユニット70Bは、ぞれぞれ治具側調節機構47と補助装置側調節機構80によりX軸回りの傾斜角度が調節可能であり、直動軸462と連結部材73Bとの連結は、それぞれの傾斜角度が一致していることが前提である。
基台60と駆動ユニット70Bとの間には、基台60に対するエアシリンダー71B及び連結部材73Bの配置を調節する補助装置側調節機構80が設けられている。なお、中央の駆動ユニット70Aは、基台60に固定的に装備され、位置調節は行われない。また、左右の駆動ユニット70B,70Bの補助装置側調節機構80,80は、互いに左右方向について対称構造なので、左側の補助装置側調節機構80のみについて説明し、右側の補助装置側調節機構80の説明は省略する。
また、この手回しハンドル83の回動支点側の端部にはカムが設けられており、手回しハンドル83を、前側支持板62又は後側支持板63の平板面に沿うように倒した状態ではカムが前側支持板62と支持フレーム72Bの前面部722B又は後側支持板63と支持フレーム72Bの後面部723Bとを圧接させて、駆動ユニット70Bの移動を規制する。
また、手回しハンドル83を、前側支持板62又は後側支持板63の平板面にほぼ垂直となるように立てた状態ではカムが前側支持板62と支持フレーム72Bの前面部722B又は後側支持板63と支持フレーム72Bの後面部723Bとの圧接状態を解除して、駆動ユニット70Bの移動を可能とする。
例えば、図10は、大きな被縫製物Cをクランプするために、クランプ治具30においてクランプ面の中心軸線回りの開き角度が大きくなる様に左右のクランプユニット40B,40Bを位置調節した状態であり、図11は、小さな被縫製物Cをクランプするために、クランプ治具30においてクランプ面の中心軸線回りの開き角度が小さくなる様に左右のクランプユニット40B,40Bを位置調節した状態である。
これらに対応するために、補助装置側調節機構80を用いて、左右の駆動ユニット70B,70Bも、クランプ面の中心軸線回りの開き角度が左右のクランプユニット40B,40Bと等しくなるように調節することにより、各クランプユニット40B,40Bの直動軸462の軸線上に各駆動ユニット70B,70Bの連結部材73B,73Bの係止部734B,734Bを配置することができ、左右のクランプユニット40B,40Bの被係止部462a,462aと各駆動ユニット70B,70Bの係止部734B,734Bとを容易に連結することができる。
図14に示すように、クランプ補助装置50の制御装置90には、各駆動ユニット70A,70B,70Bのそれぞれのエアシリンダー71A,71B,71Bを作動させる電磁弁711A,711B,711Bが駆動回路712A,712B,712Bを介して接続されている。
また、制御装置90には、図示しないインターフェイスを介して各エアシリンダー71A,71B,71Bを操作するためのフットペダル93が接続されている。
そして、制御装置90は、各エアシリンダー71A,71B,71Bに対して所定の制御を行うCPU91と、当該制御を実行させる制御プログラム及び設定データが書き込まれているメモリ92とを備えている。
各電磁弁711A,711B,711Bは、各エアシリンダー71A,71B,71Bのプランジャーの押し出し側の空気室と引き込み側の空気室のそれぞれに対して個別に空気圧の供給を大気圧への解放とを切り替えることができる。
クランプ補助装置50を用いたクランプ治具30に対する被縫製物Cの装着作業を、制御装置90が実行するクランプ補助装置50の動作制御を踏まえて説明する。
まず、作業者は、縫製が完了して縫製済みの被縫製物がクランプされたままの状態にあるクランプ治具30をクランプ補助装置50に装着する。
即ち、クランプ治具30の左右の治具把持機構35,35の各把持パッド351,351を解放状態として、当該各把持パッド351,351とフレーム31との間にクランプ補助装置50の取付板64を下方から差し込み、垂下部34を四つの突起643と下端支持部材644により位置決めする。
一方、制御装置90は、予め、各電磁弁711A,711B,711Bにより、各エアシリンダー71A,71B,71Bの押し出し側の空気室と引き込み側の空気室の両方を大気解放状態としており、手動で各駆動ユニット70A,70B,70Bの各連結部材73A,73B,73Bを昇降させて、各クランプユニット40A,40B,40Bの直動軸462と連結する。
そして、位置決め突起641,642を位置決め穴321,341に挿入して、左右の治具把持機構35,35の操作レバー353,353を前方に押し込む。これにより、各把持パッド351,351が取付板64を把持し、クランプ治具30が装着状態となる。
これにより、クランプ治具30では各クランプユニット40A,40B,40Bの上側クランプ部材41A,41A,41B,41Bが上方に回動して解放位置となる。
作業者は、縫製済みの被縫製物Cを外して新たな被縫製物Cを各下側クランプ部材42A,42A,42B,42Bに載置する。
具体的には、制御装置90は、フットペダル93の各ペダル931〜933の踏み込み回数を二回目までカウントする。例えば、ペダル931に対して一回目の踏み込みが検出されると、制御装置90は、上側クランプ部材41A,41Aが解放位置とクランプ位置の間となる中間位置(例えば、下側クランプ部材42A,42Aと上側クランプ部材41A、41Aとの間で被縫製物Cの厚さより大きな隙間ができる位置)で停止するように電磁弁711Aを介してエアシリンダー71Aを制御する。
このように中間位置を設けることにより、指挟み等の事故を防止することができる。また、上側クランプ部材41A、41Aが被縫製物Cに近接するので、被縫製物Cを適正な位置に位置決めすることができる。
これにより、上側クランプ部材41A,41Aと下側クランプ部材42A,42Aとの間に被縫製物がクランプされる。
クランプユニット40Aの支持機構43Aは、トグル機構構造を有するので、上側クランプ部材41A,41Aをクランプ位置まで移動させると、エアシリンダー71Aの推力が途絶えても、クランプ位置を維持することができる。
従って、制御装置90は、エアシリンダー71Aに対するクランプ位置側の空気室を大気解放状態に切り替えるよう電磁弁711Aを制御し、また、解放位置側の空気室も大気解放状態として、エアシリンダー71Aを何れの方向にも駆動しない状態とする。
これにより、空気圧の浪費を低減することができる。
かかる状態で、作業者は、クランプ治具30の左右の治具把持機構35,35の各把持パッド351,351を解放状態となるよう、操作レバー353,353を操作し、取付板64からクランプ治具30を取り外し、作業を終了する。
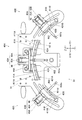
図16及び図17はミシン100の一部の構成を省略して図示した斜視図、図18はミシンの制御系を示すブロック図である。
上記ミシン100は、下端部に縫い針を保持する針棒と、針棒を上下動させる針棒上下動機構と、縫い針に通された上糸を捕捉して下糸を絡める釜機構と、中押さえ11を上下動させる中押さえ機構と、クランプ治具30を保持して揺動させる揺動機構120と、クランプ治具30をその揺動軸線に沿って移動させる軸線移動機構140と、上記各構成を格納又は搭載するミシンフレーム110と、上記各構成を制御して被縫製物Cの任意の位置に針落ちを行う制御装置160とを備えている。
なお、ミシン100の各図におけるX軸方向、Y軸方向、Z軸方向については、ミシン100にクランプ治具30を後述する取付板121に装着した場合であって、取付板121が基準位置にある状態(取付板121が鉛直上下方向に立設した状態)でのクランプ治具30に定めたX軸方向、Y軸方向、Z軸方向を適用する。
なお、図16及び図17において、ミシンフレーム110の各部のカバーの図示を一部省略しており、また、その内部の構成についても図示を省略している。
また、ミシン100はいわゆるポストベッドミシンであり、水平釜がミシンベッド部111における縫い針の下方の位置に立設されたポストベッド114の上部に内蔵されている。
中押さえは、縫い針を遊挿する円筒部を備え、当該円筒部が縫い針の上昇時に被縫製物を上から押さえて被縫製物のばたつきを押さえる役割を有している。
中押さえ機構は、中押さえを縫い針と同周期であって縫い針に遅れて上下動を行うよう動作伝達を行う。これにより、縫い針の上昇に引っ張られて上昇しようとする被縫製物を押さえ、被縫製物からの縫い針の引き抜きを良好に行わせる。
揺動機構120は、クランプ治具30の治具把持機構35により当該クランプ治具30を着脱可能に保持する取付板121と、取付板121の下端部に連結され、当該取付板121を介してクランプ治具30を揺動させる回動軸122と、ミシンベッド部111の後端部に搭載され、回動軸122にクランプ治具30の揺動動作の駆動源となる揺動モーター123と、揺動モーター123のトルクを取付板121に伝達する伝達機構124とを備えている。
四つの突起1213,1213,1213,1213は、取付板121の前面において前方に突出して設けられ、垂下部34のY軸方向の幅にほぼ等しい間隔でY軸方向に離間して配置された二つの突起1213,1213が上下に二組配置されている。
下端支持部材1214は、垂下部34の下端部の楔形状に対応して、その上面に後方斜め下に傾斜した傾斜面が形成されており、当該傾斜面と取付板121の前面との間に垂下部34の楔状の下端部を挿入する隙間を形成している。
この下端支持部材1214により、取付板121にクランプ治具30を装着する際に、垂下部34の下端部が下端支持部材1214に保持され、クランプ治具30をZ軸方向について適正に位置決めすることができる。
回動軸122はX軸方向に平行であり、回動することにより、取付板121の上部に装着されたクランプ治具30をY軸方向に沿って揺動させることができる。
また、取付板121に対する回動軸122の中心線は、取付板121に装着されたクランプ治具30のクランプ面の中心軸線と同一線上となるように位置が設定されている。従って、回動軸122の回動により、クランプ治具30はそのクランプ面の周面に沿って揺動を行うことができる。
従動プーリ1242の外径は、クランプ治具30のクランプ面の径と等しく設定されており、これによって、ミシン100に許容される範囲で最大のものを使用している。即ち、クランプ治具30のクランプ面の径は、縫製時の作業領域の範囲を等しく、このサイズと等しいプーリであればミシンに許容される幅の範囲に納めることができる。
そして、従動プーリ1242の大型化に対して、主動プーリ1241の外径は十分に小さく設定されている。これにより、回動軸122に伝達される回転数は減速されるが、トルクを大きくすることができる。従って、クランプ治具30に厚みがある被縫製物Cや固い被縫製物Cが取り付けられ、縫製時に縫い針との摩擦によって揺動動作に対して抵抗が大きくなる場合であっても、クランプ治具30の揺動動作の遅れを抑制することができる。
これらの構成により、揺動機構120は、クランプ治具30に保持された被縫製物Cの揺動角度を任意に制御することができる。
軸線移動機構140は、揺動機構120の回動軸122及び取付板121を介してクランプ治具30を揺動動作の揺動軸線方向(X軸方向)に沿って移動させる。
このため、軸線移動機構140は、揺動軸線方向移動の駆動源となる軸線移動モーター141と、立胴部112の右側面前側において軸線移動モーター141の出力軸に設けられた主動プーリ142と、立胴部112の右側面後側に設けられた従動プーリ143と、これらのプーリ142,143の間に掛け渡されたタイミングベルト144と、タイミングベルト144の途中に固定装備されたスライド部材145と、立胴部112の右側面においてスライド部材145をX軸方向に沿って滑動可能に支持するスライドガイド146とを備えている。
上記軸線移動モーター141の配置により、主動プーリ142は、Z軸回りに回転可能に支持された状態となる。また、従動プーリ143も、立胴部112の右側面後側において、Z軸回りに回転可能に支持されている。
従って、主動プーリ142と従動プーリ143はX軸方向に並ぶ配置となり、これらのプーリ142,143の間に掛け渡されたタイミングベルト144は、X軸方向に沿った状態で搬送される。
このスライド部材145は、立胴部112の内部において、揺動機構120の回動軸122とスラスト軸受けを介して連結されている。
つまり、スライド部材145はスラスト軸受けにより、回動軸122の回転を許容しつつも、スラスト方向(揺動軸線方向[X軸方向])への移動力を回動軸122に伝達することができる。
これらの構成により軸線移動機構140は、クランプ治具30に保持された被縫製物Cを揺動軸線方向に沿って任意に移動させることができる。
図18に示すように、制御装置160には、縫製に関する各種の設定や現在のミシンの状態を表示する表示パネル164と、表示パネル164に併設された各種の設定を行うための画面選択やコマンド、数値の入力を行うための設定入力手段としての設定スイッチ165と、縫製の開始を入力する操作ペダル168とが図示しない入出力回路を介して接続されている。
制御装置160は、各種の制御を行うCPU161と、ミシン100の動作制御を実行させる制御プログラム及び各種縫製データが書き込まれているメモリ162とを備えている。
縫製パターンデータは、被縫製物Cの縫製パターンを構成する全ての針落ち位置を、揺動軸線方向の位置と揺動角度とからなる座標系に展開した位置座標データを含むデータである。
縫製パターンデータは、メモリ162内に複数用意されており、これらの縫製パターンデータの中から適宜選択することができる。
上記ミシン100の被縫製物Cの縫製を行う際の準備作業から縫製作業までの流れを説明する。
クランプ治具30への被縫製物Cの装着は、前述したクランプ補助装置50により行われる。そして、被縫製物Cをクランプした状態のクランプ治具30を取付板121に装着する。
即ち、クランプ治具30の左右の治具把持機構35,35の各把持パッド351,351を解放状態として、当該各把持パッド351,351とフレーム31との間に取付板121を下方から差し込み、垂下部34を四つの突起1213と下端支持部材1214により位置決めする。
さらに、位置決め突起1211,1212を位置決め穴321,341に挿入して、左右の治具把持機構35,35の操作レバー353,353を前方に押し込む。これにより、各把持パッド351,351が取付板121を把持し、クランプ治具30が装着状態となる。
さらに、操作ペダル168により、縫製の開始が入力されると、CPU161は、ミシンモーター102の駆動を開始し、針棒の上下動に同期して毎針ごとに揺動モーター123と軸線移動モーター141を算出した動作量で駆動し、被縫製物Cを揺動及び軸線移動させて、縫製パターンデータに定められた針落ち位置に順番に針落ちを行う。
さらに、クランプ治具30を取付板121から外し、クランプ補助装置50においてクランプ治具30から被縫製物Cを取り外して、一連の縫製動作が完了する。
クランプ補助装置50は、連結部材73A,73Bとエアシリンダー71A,71Bを備える駆動ユニット70A,70Bを備え、クランプ治具30の各クランプユニット40A,40B,40Bによる被縫製物のクランプ作業を、十分な作業スペースを確保することが困難であるミシン側ではなく、作業スペースの制限を受けないクランプ補助装置50において行うことができるので、クランプ治具30に対する被縫製物の装着作業を容易且つ迅速に行うことができ、作業性の向上を図ることが可能となる。
従って、揺動と直動の組み合わせにより、被縫製物の曲面の任意の位置に対してより針落ちを行うことが可能となり、曲面に対する多彩な縫製を行うことが可能となる。
また、上記ミシン100では、縫製パターンデータ等により針落ち位置を順番に記憶しておけば、曲面上の縫製パターンについて自動縫製を行うことが可能となる。
ミシン100は、メンテナンスの際には、ミシンベッド部111の側縁部に設けられた支点を中心に例えばX軸回りに傾倒させて、ミシンベッド部111の底部を覗くことができる状態とするが、このように場合に、揺動機構120の各構成がミシンフレーム110と共に傾倒し、当該傾倒の妨げとならないので、その対処作業を不要とし、メンテナンスの作業性の向上を図ることが可能となる。
また、立胴部112に回動軸122を配置することにより、立胴部112に軸線移動機構140を設けることができる。
これにより、既存のポストベッドミシンに対して簡単な改造により上記のミシン100を実現することができ、製造の容易なミシンを提供することができる。
クランプ治具30において、クランプユニットの個体数は少なくとも二つ以上あれば良く、増減させてもよい。クランプ補助装置50の駆動ユニットの個体数についても同様である。
また、クランプ補助装置50の駆動ユニット70Aも駆動ユニット70Bと同様に位置調節可能としても良い。
31 フレーム
35 治具把持機構
40A,40B クランプユニット
41A,41B 上側クランプ部材(クランプ部材)
42A,42B 下側クランプ部材
43A,43B 支持機構
46 伝達体
47 治具側調節機構
48 間欠移動機構
50 クランプ補助装置
60 基台
64 取付板
70A,70B 駆動ユニット
71A,71B エアシリンダー(アクチュエーター)
73A,73B 連結部材
80 補助装置側調節機構
90 制御装置
93 フットペダル(操作入力部)
100 ミシン
110 ミシンフレーム
111 ミシンベッド部
112 立胴部
113 ミシンアーム部
114 ポストベッド
115 ボールスプライン
120 揺動機構
121 取付板
122 回動軸
123 揺動モーター
124 伝達機構
140 軸線移動機構
141 軸線移動モーター
142 主動プーリ
143 従動プーリ
160 制御装置
411A,411B クランプ面
421A,421B クランプ面
462 直動軸
462a 被係止部
734A,734B 係止部
1241 主動プーリ
1242 従動プーリ
A1,A2 円弧
C 被縫製物
Claims (5)
- 湾曲した曲面に沿わせて被縫製物を保持するクランプ保持具を、前記湾曲した曲面の内側に位置する軸線回りに揺動させる揺動機構を備えるミシンにおいて、
前記揺動機構は、前記軸線回りに回転可能に支持された回動軸と、
前記クランプ保持具の揺動の駆動源となる揺動モーターと、
前記揺動モーターから前記回動軸に動力を伝える伝達機構とを有し、
前記回動軸と前記揺動モーターと前記伝達機構が何れもミシンフレームに支持されていることを特徴とするミシン。 - 前記回動軸はミシンの立胴部を貫通して配置されていることを特徴とする請求項1記載のミシン。
- 前記クランプ保持具の揺動する軸線に沿って当該クランプ保持具と針棒を相対的に移動させる軸線移動機構と、
前記揺動機構の駆動源と前記軸線移動機構の駆動源とを制御して前記被縫製物の任意の位置に針落ちを行う制御装置とを備えることを特徴とする請求項1又は2に記載のミシン。 - 前記軸線移動機構が前記ミシンフレームに支持されていることを特徴とすることを特徴とする請求項3に記載のミシン。
- 前記クランプ保持具はミシンに対して着脱可能であることを特徴とする請求項1から4のいずれか一項に記載のミシン。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016032255A JP6960710B2 (ja) | 2016-02-23 | 2016-02-23 | ミシン |
| CN201710099699.5A CN107099936B (zh) | 2016-02-23 | 2017-02-23 | 缝纫机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016032255A JP6960710B2 (ja) | 2016-02-23 | 2016-02-23 | ミシン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017148180A true JP2017148180A (ja) | 2017-08-31 |
| JP6960710B2 JP6960710B2 (ja) | 2021-11-05 |
Family
ID=59675206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016032255A Active JP6960710B2 (ja) | 2016-02-23 | 2016-02-23 | ミシン |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6960710B2 (ja) |
| CN (1) | CN107099936B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109736026A (zh) * | 2019-03-19 | 2019-05-10 | 广东溢达纺织有限公司 | 可自动调节压料模具及幅裁片压料方法 |
| US11787015B2 (en) * | 2020-05-14 | 2023-10-17 | Melco International Llc | Clamping assembly |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61265169A (ja) * | 1985-05-18 | 1986-11-22 | サン・エ−アパレル協同組合 | ミシン用ロ−タリ−ドラム |
| JPS61284288A (ja) * | 1985-06-07 | 1986-12-15 | サン・エ−アパレル協同組合 | 縫着方法及び縫着装置 |
| US4998964A (en) * | 1990-03-16 | 1991-03-12 | Ultramatic Embroidery Machine Company | Computer controlled embroidery machine for embroidering on curved surfaces and attachment therefor |
| US5501163A (en) * | 1991-11-21 | 1996-03-26 | Zks-Stickmaschinen Gesellschat Mit Beschrankter Haftung | System for holding a tubular workpiece in an embroidery machine |
| JP2985164B2 (ja) * | 1992-11-04 | 1999-11-29 | ブラザー工業株式会社 | ミシンの曲布張枠駆動装置 |
| JP3500534B2 (ja) * | 2001-09-28 | 2004-02-23 | 株式会社バルダン | 帽子枠保持具 |
| JP6142359B2 (ja) * | 2011-11-16 | 2017-06-07 | 株式会社Joled | 表示パネルの製造方法および表示パネル |
| JP2013208222A (ja) * | 2012-03-30 | 2013-10-10 | Hamusu Kk | ミシン |
-
2016
- 2016-02-23 JP JP2016032255A patent/JP6960710B2/ja active Active
-
2017
- 2017-02-23 CN CN201710099699.5A patent/CN107099936B/zh active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109736026A (zh) * | 2019-03-19 | 2019-05-10 | 广东溢达纺织有限公司 | 可自动调节压料模具及幅裁片压料方法 |
| CN109736026B (zh) * | 2019-03-19 | 2023-08-29 | 广东溢达纺织有限公司 | 可自动调节压料模具及幅裁片压料方法 |
| US11787015B2 (en) * | 2020-05-14 | 2023-10-17 | Melco International Llc | Clamping assembly |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107099936B (zh) | 2021-07-30 |
| JP6960710B2 (ja) | 2021-11-05 |
| CN107099936A (zh) | 2017-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6108742B2 (ja) | ボタン穴かがりミシン | |
| CN106245239B (zh) | 夹紧机构及具备该夹紧机构的缝纫机 | |
| JP6960710B2 (ja) | ミシン | |
| JP6692179B2 (ja) | クランプ補助装置 | |
| JP2006280715A (ja) | ミシンのかがり幅調整装置 | |
| JP2000271364A (ja) | ミシンの布送り機構 | |
| JP3205162U (ja) | 縫製装置 | |
| KR20090063130A (ko) | 재봉기의 중심 노루발 장치 | |
| JP2671478B2 (ja) | ミシンの上糸つかみ装置 | |
| JPH01313087A (ja) | 糸切断及び締付装置を備えたボタン穴かがりミシン | |
| CN110592815B (zh) | 夹紧工具及夹紧辅助装置 | |
| US5088428A (en) | Button attaching machine and method | |
| JP2001334082A (ja) | 穴かがりミシンの布開き装置 | |
| JP2008167897A (ja) | ミシンの布押さえ装置 | |
| TWI386533B (zh) | Sewing sewing machine | |
| JP2006314529A (ja) | ミシンの押え装置 | |
| KR20120006213A (ko) | 주머니 달이 가이드 장치 | |
| JP2004313428A (ja) | ミシンのプレッサ装置 | |
| JP2004159819A (ja) | ミシンのプレッサ装置 | |
| CN110592814A (zh) | 缝纫机 | |
| JP2001218991A (ja) | ボビンケース交換装置 | |
| JP4739587B2 (ja) | ボタン付け用ミシン | |
| JPH0523453A (ja) | ミシン | |
| JP2001224875A (ja) | ボタン付けミシンのボタン浮かし装置 | |
| JP2003290580A (ja) | ベルトループ材供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191119 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200407 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201201 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210629 |
|
| R155 | Notification before disposition of declining of application |
Free format text: JAPANESE INTERMEDIATE CODE: R155 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211008 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6960710 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |