JP2017105233A - 遠心振子ダンパ付きパワートレインの制御装置 - Google Patents
遠心振子ダンパ付きパワートレインの制御装置 Download PDFInfo
- Publication number
- JP2017105233A JP2017105233A JP2015238463A JP2015238463A JP2017105233A JP 2017105233 A JP2017105233 A JP 2017105233A JP 2015238463 A JP2015238463 A JP 2015238463A JP 2015238463 A JP2015238463 A JP 2015238463A JP 2017105233 A JP2017105233 A JP 2017105233A
- Authority
- JP
- Japan
- Prior art keywords
- connection
- disconnection
- control
- centrifugal pendulum
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 131
- 230000008859 change Effects 0.000 claims abstract description 68
- 230000001133 acceleration Effects 0.000 claims abstract description 50
- 230000005540 biological transmission Effects 0.000 claims abstract description 43
- 238000001514 detection method Methods 0.000 claims description 3
- 238000004364 calculation method Methods 0.000 description 21
- 230000007423 decrease Effects 0.000 description 12
- 238000000034 method Methods 0.000 description 11
- 239000000446 fuel Substances 0.000 description 7
- 238000002347 injection Methods 0.000 description 6
- 239000007924 injection Substances 0.000 description 6
- 238000002485 combustion reaction Methods 0.000 description 3
- 230000000994 depressogenic effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images



Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
Abstract
【解決手段】エンジン1に連絡された変速機構3の入力軸3aに断接機構14を介して遠心振子ダンパ13が設けられた遠心振子ダンパ付きパワートレイン10を制御するコントロールユニット100は、断接機構14の断接状態を制御する断接制御部130と、エンジン1の出力トルクを変化させるエンジン制御部110とを備える。エンジン制御部110は、断接制御部130による断接機構14の断接状態の変更制御中に、エンジン1の出力トルクを変化させる。
【選択図】図4
Description
動力源に連絡された動力伝達軸に断接機構を介して遠心振子ダンパが連絡された遠心振子ダンパ付きパワートレインの制御装置であって、
前記断接機構の断接状態を制御する断接制御手段と、
前記動力源の出力トルクを補正するトルク補正手段とを備え、
前記トルク補正手段は、前記断接制御手段による前記断接機構の断接状態の変更制御中に、該変更制御に応じて前記動力源の出力トルクを補正することを特徴とする。
前記トルク補正手段は、前記断接制御手段による前記断接機構の切断状態から接続状態へ向かう変更制御中に、前記動力源の出力トルクを増加させることを特徴とする。
前記トルク補正手段は、前記断接制御手段による前記断接機構の接続状態から切断状態へ向かう変更制御中に、前記動力源の出力トルクを減少させることを特徴とする。
前記トルク補正手段は、前記動力源の出力トルクが所定値未満のときに、該出力トルクを増加させることを特徴とする。
前記動力源の出力トルクを制御するアクセルペダルの踏み込み量を検出するアクセル踏み込み量検出手段を備え、
前記トルク補正手段は、前記アクセル踏み込み量検出手段により検出されたアクセルペダルの踏み込み量が所定値未満のときに、前記動力源の出力トルクを増加させることを特徴とする。
前記動力源は減筒運転が可能なエンジンであり、
前記断接制御手段は、前記エンジンの減筒運転時に前記断接機構を接続する制御を行うことを特徴とする。
前記トルク補正手段は、前記断接制御手段による前記断接機構の断接状態の変更制御に伴って生じる車両の加速度の変化を抑制するように、前記動力源の出力トルクを変化させることを特徴とする。
前記トルク補正手段は、前記断接制御手段による前記断接機構の断接状態の変更の進行に伴って、出力トルクの変化量を小さくすることを特徴とする。
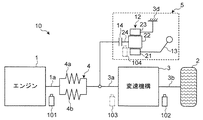
パワートレイン10は、エンジン1、該エンジン1の駆動力を駆動輪2に伝達する変速機の変速機構3、エンジン1の出力軸1aと変速機構3の入力軸3aとの間に設けられたねじりダンパ機構4、変速機構3の入力軸3aに連絡された遠心振子ダンパ機構5など備える。本実施形態の「入力軸3a」は、特許請求の範囲の「動力伝達軸」に対応する。
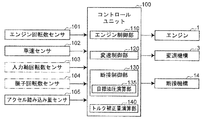
パワートレイン10の制御装置であるコントロールユニット100は、エンジン1、変速機構3および断接機構14など、パワートレイン10に関係する構成を総合的に制御する。コントロールユニット100は、演算部としてのマイクロコンピュータ、記憶部としてのメモリなどにより構成されている。
断接制御マップでは、横軸のエンジン回転数と縦軸のアクセルペダルの踏み込み量に応じた複数の走行領域が設定されており、断接機構14の断接状態は該走行領域に応じて制御される。断接機構14の断接状態は、エンジン回転数がN1以下の低速域とN2(N2>N1)以上の高速域では切断状態に制御され、減筒運転領域では接続状態に制御される。この減筒運転領域は、エンジン制御部110によりエンジン1の気筒数制御(減筒制御)が行われ、トルク変動が大きくなりやすい領域であり、エンジン回転数がN1からN2の中速域内であって、アクセルペダルの踏み込み量が所定値未満の領域に設定される。中速域のうち減筒運転領域を除いた領域では、断接機構14の断接状態は、低速域と高速域における切断状態から減筒運転領域における接続状態への移行状態であるスリップ状態に制御される。

タイムチャートの上段は、断接制御部130により制御される断接機構14の断接状態を示す。縦軸の「OFF」は断接機構14の切断状態を示し、「ON」は接続状態を示す。タイムチャートの下段は、エンジン制御部110により制御されるエンジン1の出力トルクアップ量を示す。
3 変速機構
3a 入力軸(動力伝達軸)
10 パワートレイン
13 遠心振子ダンパ
14 断接機構
100 コントロールユニット(制御装置)
110 エンジン制御部
130 断接制御部(断接制御手段)
140 トルク補正量演算部
Claims (8)
- 動力源に連絡された動力伝達軸に断接機構を介して遠心振子ダンパが連絡された遠心振子ダンパ付きパワートレインの制御装置であって、
前記断接機構の断接状態を制御する断接制御手段と、
前記動力源の出力トルクを補正するトルク補正手段とを備え、
前記トルク補正手段は、前記断接制御手段による前記断接機構の断接状態の変更制御中に、該変更制御に応じて前記動力源の出力トルクを補正することを特徴とする、
遠心振子ダンパ付きパワートレインの制御装置。 - 前記トルク補正手段は、前記断接制御手段による前記断接機構の切断状態から接続状態へ向かう変更制御中に、前記動力源の出力トルクを増加させることを特徴とする、
請求項1に記載の遠心振子ダンパ付きパワートレインの制御装置。 - 前記トルク補正手段は、前記断接制御手段による前記断接機構の接続状態から切断状態へ向かう変更制御中に、前記動力源の出力トルクを減少させることを特徴とする、
請求項1または2に記載の遠心振子ダンパ付きパワートレインの制御装置。 - 前記トルク補正手段は、前記動力源の出力トルクが所定値未満のときに、該出力トルクを増加させることを特徴とする、
請求項2に記載の遠心振子ダンパ付きパワートレインの制御装置。 - 前記動力源の出力トルクを制御するアクセルペダルの踏み込み量を検出するアクセル踏み込み量検出手段を備え、
前記トルク補正手段は、前記アクセル踏み込み量検出手段により検出されたアクセルペダルの踏み込み量が所定値未満のときに、前記動力源の出力トルクを増加させることを特徴とする、
請求項4に記載の遠心振子ダンパ付きパワートレインの制御装置。 - 前記動力源は減筒運転が可能なエンジンであり、
前記断接制御手段は、前記エンジンの減筒運転時に前記断接機構を接続する制御を行うことを特徴とする、
請求項1から5のいずれか1項に記載の遠心振子ダンパ付きパワートレインの制御装置。 - 前記トルク補正手段は、前記断接制御手段による前記断接機構の断接状態の変更制御に伴って生じる車両の加速度の変化を抑制するように、前記動力源の出力トルクを変化させることを特徴とする、
請求項1から6のいずれか1項に記載の遠心振子ダンパ付きパワートレインの制御装置。 - 前記トルク補正手段は、前記断接制御手段による前記断接機構の断接状態の変更の進行に伴って、出力トルクの変化量を小さくすることを特徴とする、
請求項1から7のいずれか1項に記載の遠心振子ダンパ付きパワートレインの制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238463A JP6354739B2 (ja) | 2015-12-07 | 2015-12-07 | 遠心振子ダンパ付きパワートレインの制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238463A JP6354739B2 (ja) | 2015-12-07 | 2015-12-07 | 遠心振子ダンパ付きパワートレインの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017105233A true JP2017105233A (ja) | 2017-06-15 |
| JP6354739B2 JP6354739B2 (ja) | 2018-07-11 |
Family
ID=59058625
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015238463A Expired - Fee Related JP6354739B2 (ja) | 2015-12-07 | 2015-12-07 | 遠心振子ダンパ付きパワートレインの制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6354739B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011185305A (ja) * | 2010-03-04 | 2011-09-22 | Toyota Motor Corp | 振子式ダイナミックダンパ |
| JP2011213165A (ja) * | 2010-03-31 | 2011-10-27 | Honda Motor Co Ltd | 車両用駆動装置の制御装置 |
| JP2013092183A (ja) * | 2011-10-25 | 2013-05-16 | Toyota Motor Corp | 振動減衰装置 |
-
2015
- 2015-12-07 JP JP2015238463A patent/JP6354739B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011185305A (ja) * | 2010-03-04 | 2011-09-22 | Toyota Motor Corp | 振子式ダイナミックダンパ |
| JP2011213165A (ja) * | 2010-03-31 | 2011-10-27 | Honda Motor Co Ltd | 車両用駆動装置の制御装置 |
| JP2013092183A (ja) * | 2011-10-25 | 2013-05-16 | Toyota Motor Corp | 振動減衰装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6354739B2 (ja) | 2018-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5649360B2 (ja) | 車両の動力伝達制御装置 | |
| JP5096552B2 (ja) | 車両の動力伝達制御装置 | |
| JP5477319B2 (ja) | ハイブリッド駆動装置の制御装置 | |
| US9791043B2 (en) | Control device of a powertrain with a centrifugal pendulum damper | |
| JP5534001B2 (ja) | 動力伝達装置 | |
| JP2013024281A (ja) | 車両の動力伝達制御装置 | |
| JP5715848B2 (ja) | 車両の動力伝達制御装置 | |
| JP6337876B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP2018204758A (ja) | 車両の制御装置 | |
| JP2013053727A (ja) | 車両の動力伝達制御装置 | |
| JP6354739B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP6278046B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP6344372B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP2012201194A (ja) | ハイブリッド駆動装置の制御装置 | |
| JP6319267B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP2012030747A (ja) | 車両の動力伝達制御装置 | |
| JP6384452B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP6323436B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP6323435B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP2013241878A (ja) | 車両駆動システムの制御装置 | |
| JP5226847B2 (ja) | 車両の動力伝達制御装置 | |
| JP2018009686A (ja) | 自動変速機の制御装置 | |
| JP6278027B2 (ja) | 遠心振子ダンパ付きパワートレインの制御装置 | |
| JP2013053726A (ja) | 車両の動力伝達制御装置 | |
| JP2013068272A (ja) | 車両の動力伝達制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171219 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180307 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180528 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6354739 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |