JP2017013203A - ロボットシステム - Google Patents
ロボットシステム Download PDFInfo
- Publication number
- JP2017013203A JP2017013203A JP2015134678A JP2015134678A JP2017013203A JP 2017013203 A JP2017013203 A JP 2017013203A JP 2015134678 A JP2015134678 A JP 2015134678A JP 2015134678 A JP2015134678 A JP 2015134678A JP 2017013203 A JP2017013203 A JP 2017013203A
- Authority
- JP
- Japan
- Prior art keywords
- area
- robot
- latent
- region
- visible light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000002159 abnormal effect Effects 0.000 claims description 17
- 230000001678 irradiating effect Effects 0.000 claims description 16
- 230000001133 acceleration Effects 0.000 description 40
- 238000000034 method Methods 0.000 description 37
- 230000008569 process Effects 0.000 description 19
- 230000008859 change Effects 0.000 description 13
- 238000009434 installation Methods 0.000 description 13
- 238000013459 approach Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 8
- 238000001514 detection method Methods 0.000 description 5
- 241000282412 Homo Species 0.000 description 4
- 230000005856 abnormality Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 239000003086 colorant Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05B—ELECTRIC HEATING; ELECTRIC LIGHT SOURCES NOT OTHERWISE PROVIDED FOR; CIRCUIT ARRANGEMENTS FOR ELECTRIC LIGHT SOURCES, IN GENERAL
- H05B47/00—Circuit arrangements for operating light sources in general, i.e. where the type of light source is not relevant
- H05B47/10—Controlling the light source
- H05B47/105—Controlling the light source in response to determined parameters
- H05B47/115—Controlling the light source in response to determined parameters by determining the presence or movement of objects or living beings
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B20/00—Energy efficient lighting technologies, e.g. halogen lamps or gas discharge lamps
- Y02B20/40—Control techniques providing energy savings, e.g. smart controller or presence detection
Abstract
Description
以下、垂直多関節型ロボットを備えるロボットシステムに具体化した第1実施形態について、図面を参照しつつ説明する。本実施形態のロボットは、例えば産業用ロボットとして機械組立工場などの組立ラインにて用いられる。
以下、第2実施形態について、第1実施形態との相違点を中心に説明する。本実施形態では、ロボット20は複数の作業を実行する。その他の構成は、第1実施形態と同様である。そして、コントローラ30は、ロボット20が実行中の作業における動作領域Aa及び潜在領域Apに、第1実施形態と同様に可視光が照射されるように照射部41を制御する。
以下、第3実施形態について、第1実施形態との相違点を中心に説明する。本実施形態では、図14に示すように、ロボットシステム100は、隣り合うように床50に設置された複数のロボット20A〜20Dと、PLC(Programmable Logic Controller)110とを備えている。PLC110は、CPU、ROM、RAM等を備え、ロボット20A〜20Dの各コントローラ30を制御する上位のコントローラである。その他の構成は、第1実施形態と同様である。
・副照射部は、黄色光を照射するものでもよく、赤色光を照射するものでもよい。すなわち、副照射部が主照射部と同一の可視光を照射するものでもよい。その場合であっても、第1ロボットの近くにいる人間に、予め第1潜在領域よりも広い領域を警戒させることができる。
Claims (11)
- 床面に設置されたロボットと、
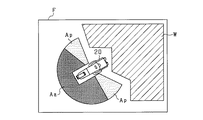
前記ロボットが所定作業において動作する空間が前記床面を占める領域である動作領域を、前記床面に視認可能に表示する表示手段と、
を備えることを特徴とするロボットシステム。 - 前記ロボットシステムの異常時に前記ロボットを強制停止させる強制停止部を備え、
前記表示手段は、前記所定作業において前記強制停止部により前記ロボットが強制停止させられるまでに動作する可能性のある空間が前記床面を占める領域である潜在領域を、さらに前記床面に視認可能に表示する請求項1に記載のロボットシステム。 - 前記表示手段は、前記床面に可視光を照射する照射部と、前記動作領域に可視光が照射されるように前記照射部を制御する制御部とを備える請求項1に記載のロボットシステム。
- 前記表示手段は、前記床面に可視光を照射する照射部と、前記動作領域及び前記潜在領域に可視光が照射されるように前記照射部を制御する制御部とを備える請求項2に記載のロボットシステム。
- 前記照射部は、前記床面に可視光の第1光を照射する第1照射部と、前記床面に前記第1光とは異なる可視光の第2光を照射する第2照射部とを備え、
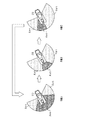
前記制御部は、前記動作領域に前記第1照射部により前記第1光を照射させ、前記潜在領域に前記第2照射部により前記第2光を照射させる請求項4に記載のロボットシステム。 - 前記制御部は、前記ロボットが前記所定作業を実行する実行速度が所定速度よりも高い場合の前記潜在領域を、前記実行速度が前記所定速度よりも低い場合の前記潜在領域よりも広く設定する請求項4又は5に記載のロボットシステム。
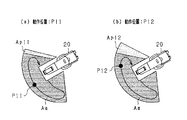
- 前記制御部は、前記ロボットが前記所定作業の実行中において、前記動作領域に対する前記ロボットの現在の動作位置に応じて、前記潜在領域を可変とする請求項4〜6のいずれか1項に記載のロボットシステム。
- 前記制御部は、前記ロボットが前記所定作業の実行中において、前記動作領域に対する前記ロボットの現在の動作方向に応じて、前記潜在領域を可変とする請求項4〜7のいずれか1項に記載のロボットシステム。
- 前記制御部は、前記ロボットの減速特性に応じて、前記潜在領域を設定する請求項4〜8のいずれか1項に記載のロボットシステム。
- 前記照射部は、前記床面に可視光を照射する範囲が互いに異なる複数のLEDを備え、
前記制御部は、前記複数のLEDのうち前記動作領域に可視光を照射する前記LEDを点灯させる請求項3に記載のロボットシステム。 - 前記照射部は、前記床面に可視光を照射する範囲が互いに異なる複数のLEDを備え、
前記制御部は、前記複数のLEDのうち、前記動作領域に可視光を照射する前記LED、及び前記潜在領域に可視光を照射する前記LEDを点灯させる請求項4〜9のいずれか1項に記載のロボットシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015134678A JP6554945B2 (ja) | 2015-07-03 | 2015-07-03 | ロボットシステム |
| CN201610509760.4A CN106313040B (zh) | 2015-07-03 | 2016-06-30 | 机器人系统 |
| US15/200,469 US10434666B2 (en) | 2015-07-03 | 2016-07-01 | Industrial robot system optically indicating motion area of robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015134678A JP6554945B2 (ja) | 2015-07-03 | 2015-07-03 | ロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017013203A true JP2017013203A (ja) | 2017-01-19 |
| JP6554945B2 JP6554945B2 (ja) | 2019-08-07 |
Family
ID=57683465
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015134678A Active JP6554945B2 (ja) | 2015-07-03 | 2015-07-03 | ロボットシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10434666B2 (ja) |
| JP (1) | JP6554945B2 (ja) |
| CN (1) | CN106313040B (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019010704A (ja) * | 2017-06-30 | 2019-01-24 | Idec株式会社 | 照光表示装置 |
| CN110340941A (zh) * | 2018-04-05 | 2019-10-18 | 发那科株式会社 | 带防护栏的机器人以及机器人系统 |
| JP2021053801A (ja) * | 2020-12-11 | 2021-04-08 | Idec株式会社 | 照光表示装置 |
| JP7338633B2 (ja) | 2018-10-12 | 2023-09-05 | ソニーグループ株式会社 | 調理システム、および調理システムの制御方法、並びにプログラム |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3658005A4 (en) | 2017-07-27 | 2021-06-23 | Intuitive Surgical Operations, Inc. | LIGHT INDICATORS ON A MEDICAL DEVICE |
| JP2019066971A (ja) * | 2017-09-29 | 2019-04-25 | キヤノン株式会社 | 画像形成装置、画像形成装置の制御方法、及びプログラム |
| EP3810374B1 (en) * | 2018-06-19 | 2022-06-01 | BAE SYSTEMS plc | Workbench system |
| JP7294880B2 (ja) * | 2019-05-20 | 2023-06-20 | ファナック株式会社 | ロボット制御装置、ロボットシステム、及びロボット制御方法 |
| US20210186644A1 (en) * | 2019-12-20 | 2021-06-24 | Auris Health, Inc. | Functional indicators for robotic medical systems |
| US20240034502A1 (en) * | 2022-07-26 | 2024-02-01 | Signode Bulgaria Eood | Wrapping machine with wrapping-zone indicator |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006007342A (ja) * | 2004-06-23 | 2006-01-12 | Mitsubishi Heavy Ind Ltd | ロボットの制御プログラム更新方法及び該システム |
| JP2006329263A (ja) * | 2005-05-24 | 2006-12-07 | Honda Motor Co Ltd | 作業ステーションの安全システム |
| WO2007085330A1 (en) * | 2006-01-30 | 2007-08-02 | Abb Ab | A method and a system for supervising a work area including an industrial robot |
| JP2008155351A (ja) * | 2006-12-26 | 2008-07-10 | Olympus Corp | ロボット |
| JP2009123045A (ja) * | 2007-11-16 | 2009-06-04 | Toyota Motor Corp | 移動ロボット及び移動ロボットの危険範囲の表示方法 |
| JP2012215394A (ja) * | 2011-03-31 | 2012-11-08 | Dainippon Screen Mfg Co Ltd | 三次元計測装置および三次元計測方法 |
| JPWO2011089885A1 (ja) * | 2010-01-25 | 2013-05-23 | パナソニック株式会社 | 危険提示装置、危険提示システム、危険提示方法およびプログラム |
| US20130201292A1 (en) * | 2010-04-16 | 2013-08-08 | Otto-Von Guericke-Universitat Magdeburg | Device For Monitoring At Least One Three-Dimensional Safety Area |
| JP2014140920A (ja) * | 2013-01-23 | 2014-08-07 | Denso Wave Inc | ロボット周辺への物体の侵入を監視する監視システムおよび監視方法 |
| JP2014180723A (ja) * | 2013-03-19 | 2014-09-29 | Yaskawa Electric Corp | ロボットシステム及び被加工物の製造方法 |
| WO2016173609A1 (en) * | 2015-04-27 | 2016-11-03 | Abb Technology Ltd | A movement indicator for a robot |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01262498A (ja) * | 1988-04-14 | 1989-10-19 | Toshiba Corp | 監視装置 |
| US7729511B2 (en) * | 2002-09-24 | 2010-06-01 | Pilz Gmbh & Co. Kg | Method and device for safeguarding a hazardous area |
| DE102004041821A1 (de) * | 2004-08-27 | 2006-03-16 | Abb Research Ltd. | Vorrichtung und Verfahren zur Sicherung eines maschinell gesteuerten Handhabungsgerätes |
| JP5473044B2 (ja) * | 2009-01-31 | 2014-04-16 | 株式会社キーエンス | 安全光電スイッチ |
| US8415609B2 (en) * | 2009-01-31 | 2013-04-09 | Keyence Corporation | Safety photoelectric switch |
| DE102009010460B4 (de) * | 2009-02-13 | 2010-11-25 | Pilz Gmbh & Co. Kg | Vorrichtung und Verfahren zum Bestimmen der Nachlaufzeit einer Maschine |
| WO2011080882A1 (ja) * | 2009-12-28 | 2011-07-07 | パナソニック株式会社 | 動作空間提示装置、動作空間提示方法およびプログラム |
| JP2012236244A (ja) * | 2011-05-10 | 2012-12-06 | Sony Corp | ロボット装置、ロボット装置の制御方法、並びにロボット装置制御用プログラム |
| EP2624017B1 (en) * | 2012-02-02 | 2020-06-17 | Rockwell Automation Switzerland GmbH | Integrated laser alignment aid using multiple laser spots out of one single laser |
| US9043025B2 (en) * | 2012-08-31 | 2015-05-26 | Rethink Robotics, Inc. | Systems and methods for safe robot operation |
| JP5776716B2 (ja) * | 2013-03-15 | 2015-09-09 | 株式会社安川電機 | ロボットシステム及び被作業物の製造方法 |
| JP2014188645A (ja) | 2013-03-28 | 2014-10-06 | Seiko Epson Corp | ロボット群システム |
| US9452531B2 (en) * | 2014-02-04 | 2016-09-27 | Microsoft Technology Licensing, Llc | Controlling a robot in the presence of a moving object |
-
2015
- 2015-07-03 JP JP2015134678A patent/JP6554945B2/ja active Active
-
2016
- 2016-06-30 CN CN201610509760.4A patent/CN106313040B/zh active Active
- 2016-07-01 US US15/200,469 patent/US10434666B2/en active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006007342A (ja) * | 2004-06-23 | 2006-01-12 | Mitsubishi Heavy Ind Ltd | ロボットの制御プログラム更新方法及び該システム |
| JP2006329263A (ja) * | 2005-05-24 | 2006-12-07 | Honda Motor Co Ltd | 作業ステーションの安全システム |
| WO2007085330A1 (en) * | 2006-01-30 | 2007-08-02 | Abb Ab | A method and a system for supervising a work area including an industrial robot |
| JP2008155351A (ja) * | 2006-12-26 | 2008-07-10 | Olympus Corp | ロボット |
| JP2009123045A (ja) * | 2007-11-16 | 2009-06-04 | Toyota Motor Corp | 移動ロボット及び移動ロボットの危険範囲の表示方法 |
| JPWO2011089885A1 (ja) * | 2010-01-25 | 2013-05-23 | パナソニック株式会社 | 危険提示装置、危険提示システム、危険提示方法およびプログラム |
| US20130201292A1 (en) * | 2010-04-16 | 2013-08-08 | Otto-Von Guericke-Universitat Magdeburg | Device For Monitoring At Least One Three-Dimensional Safety Area |
| JP2012215394A (ja) * | 2011-03-31 | 2012-11-08 | Dainippon Screen Mfg Co Ltd | 三次元計測装置および三次元計測方法 |
| JP2014140920A (ja) * | 2013-01-23 | 2014-08-07 | Denso Wave Inc | ロボット周辺への物体の侵入を監視する監視システムおよび監視方法 |
| JP2014180723A (ja) * | 2013-03-19 | 2014-09-29 | Yaskawa Electric Corp | ロボットシステム及び被加工物の製造方法 |
| WO2016173609A1 (en) * | 2015-04-27 | 2016-11-03 | Abb Technology Ltd | A movement indicator for a robot |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019010704A (ja) * | 2017-06-30 | 2019-01-24 | Idec株式会社 | 照光表示装置 |
| CN110340941A (zh) * | 2018-04-05 | 2019-10-18 | 发那科株式会社 | 带防护栏的机器人以及机器人系统 |
| JP7338633B2 (ja) | 2018-10-12 | 2023-09-05 | ソニーグループ株式会社 | 調理システム、および調理システムの制御方法、並びにプログラム |
| JP2021053801A (ja) * | 2020-12-11 | 2021-04-08 | Idec株式会社 | 照光表示装置 |
| JP7137609B2 (ja) | 2020-12-11 | 2022-09-14 | Idec株式会社 | 照光表示装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106313040B (zh) | 2020-03-20 |
| US20170001315A1 (en) | 2017-01-05 |
| CN106313040A (zh) | 2017-01-11 |
| US10434666B2 (en) | 2019-10-08 |
| JP6554945B2 (ja) | 2019-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6554945B2 (ja) | ロボットシステム | |
| JP6464945B2 (ja) | ロボットシステム | |
| JP6554946B2 (ja) | ロボットシステム | |
| CN105313136B (zh) | 机器人装置 | |
| KR102173609B1 (ko) | 가이드 로봇 및 이의 이동 영역 캘리브레이션 방법, 컴퓨터 판독 가능한 저장매체 | |
| CN105555490A (zh) | 工作站 | |
| JP2019502617A5 (ja) | ||
| CN108290292B (zh) | 可变保护区的显示 | |
| US10035267B2 (en) | Robot system and method for controlling a robot system | |
| JP2008191823A (ja) | 安全管理方法、安全管理システムおよび安全制御機器 | |
| US20160031084A1 (en) | Double arm robot | |
| US10836035B2 (en) | Operation control device for movable apparatus, operation control system, and method of controlling operations by movable apparatus | |
| US10265860B2 (en) | Method and apparatus for controlling operations of robot | |
| JP2009123045A (ja) | 移動ロボット及び移動ロボットの危険範囲の表示方法 | |
| JP2017013206A (ja) | ロボットシステム | |
| JP2017148905A (ja) | ロボットシステムおよびロボット制御装置 | |
| US20170276468A1 (en) | Method for monitoring a coordinate measuring device | |
| US20150290853A1 (en) | Injection molding machine provided with elevation type signal lamp | |
| US20150220070A1 (en) | Variable speed device and variable speed system | |
| JP5590057B2 (ja) | 作業システム及び作業方法 | |
| WO2017221171A9 (en) | Collaborative robot, signalling system and process of signalling a displacement of a collaborative robot | |
| CN111246978B (zh) | 用于运行机器人臂的方法和系统 | |
| JP2021080063A (ja) | 天井クレーン装置の移動操作方法、移動方向表示装置及び移動操作システム | |
| JP2017149506A (ja) | 負荷率表示装置及び建設機械 | |
| JPH0424809A (ja) | ロボット制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190624 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6554945 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |