JP2017013169A - 搬送ロボット - Google Patents
搬送ロボット Download PDFInfo
- Publication number
- JP2017013169A JP2017013169A JP2015131428A JP2015131428A JP2017013169A JP 2017013169 A JP2017013169 A JP 2017013169A JP 2015131428 A JP2015131428 A JP 2015131428A JP 2015131428 A JP2015131428 A JP 2015131428A JP 2017013169 A JP2017013169 A JP 2017013169A
- Authority
- JP
- Japan
- Prior art keywords
- holding member
- connection device
- robot
- workpiece holding
- workpiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Manipulator (AREA)
Abstract
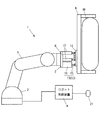
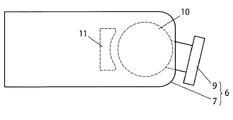
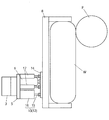
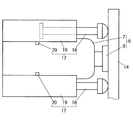
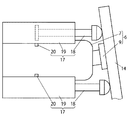
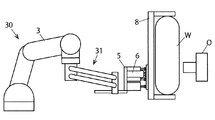
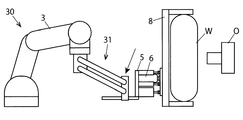
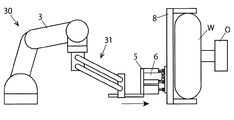
【解決手段】搬送ロボット1は、ワーク保持部材8をロボットアーム3に接続する接続装置6であって、その本体部に関してワーク保持部材8を傾動可能に支持する支持手段を有する、接続装置6と、接続装置6の本体部に関してワーク保持部材8を所定姿勢に維持する姿勢維持装置12と、接続装置6の本体部に関してワーク保持部材8が傾動したことを検出する検出手段17と、接続装置6の本体部に関してワーク保持部材8が傾動したことを検出手段17によって検出した場合にロボットアーム3に安全動作を行わせるロボット制御装置4と、を備える。
【選択図】図1
Description
2 ロボット基台
3 ロボットアーム
4 ロボット制御装置
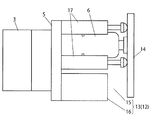
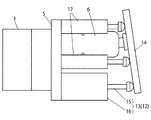
5 ベース部材
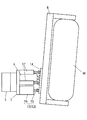
6 接続装置
7 接続装置の本体部
8 ワーク保持部材
9 接続装置の軸部
10 接続装置の球状軸受
11 接続装置のロック機構
12 姿勢維持装置
13 押圧用エアシリンダ(押圧手段)
14 被押圧板
15 押圧用エアシリンダのピストン部
16 押圧用エアシリンダのシリンダ本体部
17 検出用エアシリンダ(検出手段)
18 検出用エアシリンダのピストン部
19 検出用エアシリンダのシリンダ本体部
20 検出用エアシリンダの位置検出センサ
21 人感センサ
31 フローティングユニット
32 フローティングユニットの水平移動機構
33 フローティングユニットの垂直移動機構
34 垂直移動機構の固定部
35 垂直移動機構の平行リンク
36 垂直移動機構の昇降稼働部
O ワークの取付け対象物
W ワーク
Claims (11)
- ワークを搬送するための搬送ロボットであって、
ロボットアームと、
前記ワークを保持するためのワーク保持部材と、
前記ワーク保持部材を前記ロボットアームに接続するための接続装置であって、前記接続装置の本体部に関して前記ワーク保持部材を傾動可能に支持するための支持手段を有する、接続装置と、
前記接続装置の前記本体部に関して前記ワーク保持部材を所定の姿勢に維持するための姿勢維持装置と、
前記接続装置の前記本体部に関して前記ワーク保持部材が傾動したことを検出するための検出手段と、
前記ロボットアームを制御するためのロボット制御装置であって、前記接続装置の前記本体部に関して前記ワーク保持部材が傾動したことを前記検出手段によって検出した場合に前記ロボットアームに安全動作を行わせる、ロボット制御装置と、を備えた搬送ロボット。 - 前記接続装置の前記支持手段は、前記本体部から突出し、前記ワーク保持部材に先端が固定された軸部と、前記本体部に対して前記軸部を傾動可能に支持するための軸部支持部と、を有する、請求項1記載の搬送ロボット。
- 前記接続装置は、前記軸部を解放可能に固定して傾動不能とするためのロック機構を有する、請求項2記載の搬送ロボット。
- 人の接近を検出するための人感センサをさらに有し、
前記ロボット制御装置は、前記人感センサからの人の接近に関する検出信号に基づいて、前記接続装置の前記ロック機構をロック状態から非ロック状態に切り替える、請求項3記載の搬送ロボット。 - 前記姿勢維持手段は、前記ワーク保持部材または前記ワーク保持部材に取り付けられた他の部材を押圧して前記ワーク保持部材を前記所定の姿勢に維持するための押圧手段を有する、請求項1乃至4のいずれか一項に記載の搬送ロボット。
- 前記押圧手段は、重力の作用によって傾動しようとする前記ワーク保持部材を支持して前記所定の姿勢に維持するように構成されている、請求項5記載の搬送ロボット。
- 前記押圧手段は、押圧用シリンダ部材を有し、
前記押圧用シリンダ部材は、前記ワーク保持部材または前記ワーク保持部材に取り付けられた他の部材に先端が当接されるピストン部と、前記ピストン部を駆動するためのシリンダ本体部と、を有する、請求項5または6に記載の搬送ロボット。 - 前記検出手段は、前記接続装置の近傍に設けられた検出用シリンダ部材を有し、
前記検出用シリンダ部材は、前記ワーク保持部材または前記ワーク保持部材に取り付けられた他の部材に先端が当接されるピストン部と、前記ピストン部を駆動するためのシリンダ本体部と、前記シリンダ本体部に関する前記ピストン部の位置を検出するための位置検出センサと、を有する、請求項1乃至7のいずれか一項に記載の搬送ロボット。 - 前記検出用シリンダ部材は、前記ワーク保持部材の傾動動作の方向に関わらず前記傾動動作を検出するために、前記接続装置の周囲に複数設けられている、請求項8記載の搬送ロボット。
- 前記ロボットアームの先端に設けられたフローティングユニットをさらに有し、
前記接続装置は、前記フローティングユニットを介して前記ロボットアームに装着されており、
前記フローティングユニットは、少なくとも、前記ロボットアームに関する前記接続装置の水平方向への移動を可能とする、請求項1乃至9のいずれか一項に記載の搬送ロボット。 - 前記フローティングユニットは、前記ロボットアームに関する前記接続装置の水平方向への移動を可能にすると共に、前記接続装置を上方に向けて弾発的に支持して前記接続装置の上下方向への移動を可能とする、請求項10記載の搬送ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015131428A JP2017013169A (ja) | 2015-06-30 | 2015-06-30 | 搬送ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015131428A JP2017013169A (ja) | 2015-06-30 | 2015-06-30 | 搬送ロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017013169A true JP2017013169A (ja) | 2017-01-19 |
Family
ID=57828658
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015131428A Pending JP2017013169A (ja) | 2015-06-30 | 2015-06-30 | 搬送ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017013169A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019042871A (ja) * | 2017-09-01 | 2019-03-22 | 川崎重工業株式会社 | ロボットシステム |
| CN119589364A (zh) * | 2024-12-28 | 2025-03-11 | 安徽隆威汽车零部件有限公司 | 一种橡胶缓冲块压装设备 |
| WO2025115866A1 (ja) * | 2023-12-01 | 2025-06-05 | Smc株式会社 | コンプライアンスユニット |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6071592U (ja) * | 1983-10-24 | 1985-05-20 | 株式会社小松製作所 | ロボツト装置 |
| JPH0423283U (ja) * | 1990-06-15 | 1992-02-26 | ||
| JP2006142416A (ja) * | 2004-11-17 | 2006-06-08 | Honda Motor Co Ltd | フローティング・ロック装置 |
| JP2015000470A (ja) * | 2013-06-18 | 2015-01-05 | トヨタ自動車株式会社 | ロボット制御装置及びロボット制御方法 |
-
2015
- 2015-06-30 JP JP2015131428A patent/JP2017013169A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6071592U (ja) * | 1983-10-24 | 1985-05-20 | 株式会社小松製作所 | ロボツト装置 |
| JPH0423283U (ja) * | 1990-06-15 | 1992-02-26 | ||
| JP2006142416A (ja) * | 2004-11-17 | 2006-06-08 | Honda Motor Co Ltd | フローティング・ロック装置 |
| JP2015000470A (ja) * | 2013-06-18 | 2015-01-05 | トヨタ自動車株式会社 | ロボット制御装置及びロボット制御方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019042871A (ja) * | 2017-09-01 | 2019-03-22 | 川崎重工業株式会社 | ロボットシステム |
| JP7011910B2 (ja) | 2017-09-01 | 2022-01-27 | 川崎重工業株式会社 | ロボットシステム |
| WO2025115866A1 (ja) * | 2023-12-01 | 2025-06-05 | Smc株式会社 | コンプライアンスユニット |
| CN119589364A (zh) * | 2024-12-28 | 2025-03-11 | 安徽隆威汽车零部件有限公司 | 一种橡胶缓冲块压装设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10471603B2 (en) | System for conveying workpiece having external force monitoring function | |
| JP4508263B2 (ja) | パワーアシスト装置およびその制御方法 | |
| JP5480246B2 (ja) | 作業装置及び作業方法 | |
| CN101518901B (zh) | 动力辅助设备及其控制方法 | |
| JP5621433B2 (ja) | ロボット及びその制御方法 | |
| JP2017013169A (ja) | 搬送ロボット | |
| US20130248477A1 (en) | Movement device configured for moving a payload | |
| CN109311642A (zh) | 移动式起重机 | |
| JP2010241518A (ja) | 荷役機械及び荷役機械の制御方法 | |
| JP2012086310A (ja) | 荷搬送ロボット | |
| CN107428012A (zh) | 机械手、机械手的控制方法、工件的安装方法以及工件的搬运方法 | |
| JP2012110992A (ja) | 荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット | |
| KR102248155B1 (ko) | 포트홀에 대한 전복방지가 가능한 고소작업장치 | |
| JP6445114B2 (ja) | 外力監視機能を有するワーク搬送方法システム | |
| JP2009184826A (ja) | フォークリフト | |
| JP2012086311A (ja) | 荷搬送ロボット | |
| JP2017506296A (ja) | トラック搭載型コンクリートポンプ | |
| KR20070032706A (ko) | 다리식 이동 로봇의 제어방법 | |
| JP2023125580A (ja) | 搬送システム | |
| CN108867747B (zh) | 工程机械作业臂架自动回位调节系统、方法及工程机械 | |
| JP5131113B2 (ja) | 移乗装置及び移乗方法 | |
| JP4669801B2 (ja) | 無慣性タイプの荷重取扱装置 | |
| JP6357392B2 (ja) | 鋼板移送装置 | |
| WO2019007448A1 (en) | METHOD FOR HEAVY LOAD HANDLING AND DEVICE FOR HEAVY LOAD HANDLING | |
| CN223813103U (zh) | 取出系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180629 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190902 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200106 |