以下、本発明の実施の形態に係る建設機械の代表例として、クローラ式の油圧ショベルを例に挙げ、添付図面に従って詳細に説明する。
図1および図2は、本発明の実施の形態による油圧ショベル1を示している。油圧ショベル1は、自走可能なクローラ式の下部走行体2と、下部走行体2上に旋回装置3を介して旋回可能に搭載された上部旋回体4と、上部旋回体4の前側に設けられ掘削作業等を行う作業装置7とを備えている。このとき、下部走行体2と上部旋回体4とは、油圧ショベル1の車体を構成している。
上部旋回体4は、支持構造体を形成する旋回フレーム5と、旋回フレーム5の左前側に搭載された後述のキャブ9と、キャブ9の後側に位置して旋回フレーム5に搭載されエンジン、油圧ポンプ、コントロールバルブ等(いずれも図示せず)を覆う建屋カバー6と、建屋カバー6の後側に位置して旋回フレーム5の後部に取付けられ、作業装置7との重量バランスをとるカウンタウエイト8とを備えている。
作業装置7は、上部旋回体4に俯仰動可能に設けられている。具体的には、作業装置7は、上部旋回体4の前側で左右方向の中央付近に配置され、旋回フレーム5に取り付けられている。図1に示すように、作業装置7は、例えばブーム7A、アーム7B、バケット7Cと、これらを駆動するブームシリンダ7D、アームシリンダ7E、バケットシリンダ7Fとによって構成されている。作業装置7は多関節構造となり、ブーム7A、アーム7B、バケット7Cが、互いにピン結合されている。作業装置7は、シリンダ7D〜7Fを伸長または縮小することによって俯仰動し、例えば土砂、岩石等の掘削作業や積込み作業を行う。
また、ブーム7Aの基端部は、旋回フレーム5にピン結合されている。旋回フレーム5には、作業装置7の傾斜角度として、ブーム7Aの傾斜角度(ブーム角)を検出するブーム角センサ7Gが設けられている。ブーム角センサ7Gは、後述のモニタ画像処理装置28に接続され、ブーム角の検出結果を、モニタ画像処理装置28に向けて出力する。
キャブ9は、オペレータOPが搭乗する運転室を画成する。キャブ9は、上部旋回体4の前側で左右方向の左側に配置されている。このため、キャブ9の右側には、作業装置7が隣合った状態で配置されている。
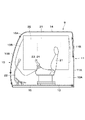
図3および図4に示すように、キャブ9は、前面部10、後面部11、左側面部12、右側面部13、天面部14を備え、これらによって囲まれたボックス状に形成されている。また、キャブ9の下側には、床面と形成するフロア部材15が設けられている。
前面部10は、キャブ9の前後方向の前側に配置されている。前面部10は、前面パネル10Aと、前面パネル10Aに取り付けられた前窓10Bとを備えている。前窓10Bは、例えば透明なガラス板を用いて上,下方向に延びる長方形の板状に形成されている。このため、キャブ9内に搭乗したオペレータOPは、前窓10Bを通じて、前方を目視することができる。
後面部11は、前面部10と前後方向で対面している。後面部11は、後面パネル11Aと、後面パネル11Aに取り付けられた後窓11Bとを備えている。後窓11Bは、例えば透明なガラス板を用いて長方形の板状に形成され、建屋カバー6よりも上側に配置されている。
左側面部12は、キャブ9の左右方向の左側に配置されている。このとき、左側面部12は、右側面部13に比べて左右方向で作業装置7から離れた位置に配置されている。左側面部12は、左側面パネル12Aと、左側面パネル12Aの前側に設けられた乗降口12Bと、乗降口12Bを開,閉するためのドア12Cとを備えている。オペレータOPは、ドア12Cを開くことにより、乗降口12Bを通じてキャブ9内に乗り降りする。
右側面部13は、キャブ9の左右方向の右側に配置されている。このとき、右側面部13は、左側面部12に比べて左右方向で作業装置7に近い位置に配置されている。左側面部12と右側面部13とは、前面部10および後面部11を挟んで左右方向で対面している。右側面部13は、右側面パネル13Aと、右側面パネル13Aの上下方向の中間部から上側に亘る範囲に設けられた右窓13Bとを備えている。右窓13Bは、例えば透明なガラス板を用いて板状に形成されている。
前面部10と左側面部12とが交わる角隅部には左前ピラー16が形成され、前面部10と右側面部13とが交わる角隅部には右前ピラー17が形成されている。また、後面部11と左側面部12とが交わる角隅部には左後ピラー18が形成され、後面部11と右側面部13とが交わる角隅部には右後ピラー19が形成されている。左側面部12の前後方向の中間位置にはセンタピラー20が形成されている。センタピラー20には、ヒンジ20Aを介してドア12Cが開,閉可能に取り付けられている。
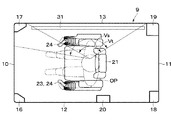
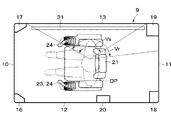
キャブ9内には、オペレータOPが着座する運転席21が設けられる。これに加えて、キャブ9には、油圧ショベル1の走行動作、作業動作および旋回動作をオペレータOPが操作するための操作装置22〜24が設けられている。具体的には、キャブ9内には、運転席21の周囲に位置して、操作レバー、操作ペダル等からなる走行操作装置22と、操作レバー等からなる旋回操作装置23と、操作レバー等からなる作業操作装置24とが設けられている。
走行操作装置22は、例えば運転席21の前側に配置されている。また、旋回操作装置23は、例えば運転席21の左側に配置された操作レバーのうち前後方向の操作部分が該当する。さらに、作業操作装置24は、運転席21の左側に配置された操作レバーのうち左右方向の操作部分(アーム操作)と、運転席21の右側に配置された操作レバーのうち前後方向の操作部分(ブーム操作)と左右方向の操作部分(バケット操作)とが該当する。なお、操作レバーの操作方向と旋回動作や作業動作との関係は、前述したものに限らず、油圧ショベル1の仕様等に応じて適宜設定される。
ここで、操作装置22〜24には、これらの操作量(レバー操作量OA)を検出する操作量センサ22A〜24Aがそれぞれ設けられている。これらの操作量センサ22A〜24Aは、例えば下部走行体2の走行操作、上部旋回体4の旋回操作、作業装置7の俯仰動操作(掘削操作)等のような車体の操作状態を検出する車体操作状態検出装置を構成している。
具体的には、操作量センサ22A〜24Aは、コントロールバルブ(図示せず)のパイロット圧を検出するパイロット圧センサによって構成されている。この場合、コントロールバルブは、走行操作装置22によるパイロット圧に応じて、走行用の油圧モータに対する圧油の供給と排出を切り換える。コントロールバルブは、旋回操作装置23によるパイロット圧に応じて、旋回装置3の油圧モータに対する圧油の供給と排出を切り換える。コントロールバルブは、作業操作装置24によるパイロット圧に応じて、シリンダ7D〜7Fに対する圧油の供給と排出を切り換える。このため、操作量センサ22A〜24Aは、操作装置22〜24によるパイロット圧を検出することによって、走行動作、旋回動作、作業動作を検出する。なお、操作量センサ22A〜24Aは、パイロット圧センサに限らず、例えば操作装置22〜24の操作位置を検出する位置センサ等でもよい。
図2および図5に示すように、カメラ25〜27は、上部旋回体4に設けられ、前側風景、後側風景および左右方向で作業装置7を挟んでキャブ9とは反対側の風景を撮影する。即ち、カメラ25〜27は、上部旋回体4の前方から後方に亘る範囲で右側の車外風景を撮影する。
具体的には、前側カメラ25は、上部旋回体4の前部右側に設けられ、キャブ9内に着座したオペレータOPから見て、主として右前方の風景を撮影する。これにより、前側カメラ25は、前側視界V1に応じた前側カメラ画像を出力する。
右側カメラ26は、上部旋回体4の右側に設けられ、キャブ9内に着座したオペレータOPから見て、主として右側の風景を撮影する。即ち、右側カメラ26は、上部旋回体4のうち左右方向でキャブ9が設けられた左側とは反対側(右側)の風景を撮影する。これにより、右側カメラ26は、右側視界V2に応じた右側カメラ画像を出力する。
後側カメラ27は、上部旋回体4の後方に設けられ、キャブ9内に着座したオペレータOPから見て、主として後方の風景を撮影する。これにより、後側カメラ27は、後側視界V3に応じた後側カメラ画像を出力する。
カメラ25〜27は、運転席21に着座したオペレータOPから死角になる車外風景を撮影する。カメラ25〜27は、例えばビデオカメラ等によって構成され、動画または連続的な静止画が撮影可能である。カメラ25〜27は、モニタ画像処理装置28に接続され、それぞれが撮影した風景の画像信号を、モニタ画像処理装置28に向けて出力する。
モニタ画像処理装置28は、カメラ25〜27と後述のモニタ装置31とに接続されている。モニタ画像処理装置28は、例えばマイクロコンピュータによって構成され、カメラ25〜27によって撮影した車外風景に基づいて、オペレータOPの死角部分を含む風景画像を生成し、モニタ装置31に出力する。具体的には、モニタ画像処理装置28は、3台のカメラ25〜27によって撮影された3方向の画像を合成して、例えばオペレータOPから見て上部旋回体4の右側で視野角が180°近くまで広がった合成画像CIを生成する(図6参照)。図6は、上部旋回体4の右側に土砂ESを運搬するダンプトラックDTが配置されたときの合成画像CIの一例を示している。このとき、合成画像CIの視界V0は、前側視界V1、右側視界V2および後側視界V3を合わせたものになっている。なお、複数の画像の合成には、例えば特開2015−15527号公報等に開示された各種のビデオモザイキング技術を用いることができる。
また、モニタ画像処理装置28は、操作量センサ22A〜24A、ブーム角センサ7G、手元側画像操作装置29、情報処理装置30にも接続されている。モニタ画像処理装置28は、画像切換え装置を備え、後述の画像切換え処理のプログラムを実行する。具体的には、モニタ画像処理装置28は、操作量センサ22A〜24Aからの信号に基づいて、油圧ショベル1の作業状態を判別し、作業状態に応じて合成画像CIの一部を抽出する。これにより、モニタ画像処理装置28は、走行動作を行うときに表示する走行用画面35と、作業動作を行うときに表示する作業用画面36と、旋回動作を行うときに表示する旋回用画面37とを生成する。
これに加えて、モニタ画像処理装置28は、例えば油圧ショベル1の停止状態等のように、作業動作、旋回動作、走行動作のいずれにも該当しないときに表示する標準画面34を生成する。この標準画面34は、合成画像CI全部でもよく、合成画像CIの一部を抽出したものでもよく、合成画像CIの範囲内でオペレータOPによって任意に設定可能である。そして、モニタ画像処理装置28は、油圧ショベル1の作業状態に応じて、これらの画面34〜37のうちいずれか1つを選択的にモニタ装置31に表示し、モニタ装置31に表示する画面を切り換える。
モニタ画像処理装置28は、車外風景に対して死角を作り出す部材を、オペレータOPの操作または作業状態に基づいて、モニタ装置31の画面に表示させることができる。具体的には、モニタ画像処理装置28は、右前ピラー17、右後ピラー19、ブーム7Aの位置と大きさを把握し、これらの像を表示画面中に合成する。このとき、右前ピラー17の像IMfと右後ピラー19の像IMrは、例えばその外形に沿った破線を用いて表示される。また、ブーム7Aの像IMbは、例えばその外形に沿った破線を用いて表示され、または、半透明な影を用いて表示される。これらの像IMf,IMr,IMbを表示するか否かは、オペレータOPが手元側画像操作装置29やモニタ装置31表面のタッチパネル32を操作することによって、設定することができる。ブーム7Aの像IMbは、ブーム角センサ7Gによるブーム角の検出結果に基づいて、実際のブーム7Aの俯仰動に応じて回動変位する。
また、モニタ画像処理装置28には、油圧ショベル1を駆動するに際して補助的な各種の情報が情報処理装置30から入力される。情報処理装置30からの入力には、例えば操作装置23,24のガイダンス情報と、作業現場の地図情報と、作業当日を含めた作業全般の日程を示す作業工程表と、監督者からの作業指示内容とが含まれる。このため、モニタ画像処理装置28は、情報処理装置30からの各種の情報に基づいて、補助画面34A〜37Aを生成し、これらの補助画面34A〜37Aをモニタ装置31の画面上に表示させることができる。
手元側画像操作装置29は、モニタ装置31に表示される標準画面34の画像を操作する。図3に示すように、手元側画像操作装置29は、運転席21よりもモニタ装置31に近い位置に配置されている。具体的には、手元側画像操作装置29は、例えば運転席21の右側に位置するコンソールボックス等に取り付けられている。手元側画像操作装置29は、表示領域選択ボタン29A、死角対象物表示選択ボタン29B、補助情報表示選択ボタン29Cおよび固定ON/OFFボタン29Dを備える。
表示領域選択ボタン29Aは、合成画像CIの範囲で、モニタ装置31の標準画面34に表示する画像の大きさや領域を選択する。オペレータOPは、表示領域選択ボタン29Aを操作することによって、例えば肉眼視同等の範囲、肉眼視同等の範囲に右前ピラー17による死角を含む前方部分を追加した範囲、肉眼視同等の範囲に右後ピラー19による死角を含む後方部分を追加した範囲、肉眼視同等の範囲に2本のピラー17,19による死角を含む範囲、合成画像CIの範囲内で任意に設定した範囲等を選択することができる。これにより、表示領域選択ボタン29Aは、オペレータOPの意思に応じた視野範囲の画像をモニタ装置31に表示させることができる。
死角対象物表示選択ボタン29Bは、モニタ装置31の標準画面34に死角対象物を表示するか否かを選択する。具体的には、死角対象物表示選択ボタン29Bは、オペレータOPの操作によって、右前ピラー17、右後ピラー19、ブーム7Aのうち表示するものを選択する。これにより、死角対象物表示選択ボタン29Bによって選択されなかったものは、標準画面34から消去される。このため、死角を作り出す右前ピラー17、右後ピラー19、ブーム7Aのうち全てを表示することもでき、全てを消去することもできる。これらの表示と非表示は、オペレータOPが意思に応じて、任意に選択することができる。なお、死角対象物には、右前ピラー17、右後ピラー19、ブーム7Aに加えて、上部旋回体4の右側車体部分を加えてもよい。
補助情報表示選択ボタン29Cは、モニタ装置31の標準画面34に補助画面34Aを表示するか否かを選択する。具体的には、補助情報表示選択ボタン29Cは、オペレータOPの操作によって、補助画面34Aの表示が選択されると、モニタ装置31の標準画面34には補助画面34Aが表示される。一方、補助情報表示選択ボタン29Cは、オペレータOPの操作によって、補助画面34Aの非表示が選択されると、モニタ装置31の標準画面34から補助画面34Aは消去されると共に、再表示ボタン38が表示される。この状態で、オペレータOPが再表示ボタン38を操作すると、補助画面34Aは非表示状態から表示状態に切り換わる。
なお、補助画面34Aの非表示状態で、補助情報表示選択ボタン29Cによって補助画面34Aの表示を選択したときに、補助画面34Aを再表示してもよい。また、手元側画像操作装置29は、補助情報表示選択ボタン29Cとは別個に再表示ボタンを備えてもよい。
固定ON/OFFボタン29Dは、モニタ装置31の標準画面34を固定するか、作業状態に応じて切り換えるかを選択する。具体的には、固定ON/OFFボタン29Dは、オペレータOPの操作によって、「固定ON」に設定されると、モニタ装置31を標準画面34に固定する。これにより、油圧ショベル1の作業状態が走行動作、旋回動作、作業動作のいずれかに切り換わっても、モニタ装置31には標準画面34が表示された状態になり、走行用画面35、作業用画面36、旋回用画面37に切り換わることはない。
一方、固定ON/OFFボタン29Dは、オペレータOPの操作によって、「固定OFF」に設定されると、作業状態に応じてモニタ装置31が標準画面34から切り換わるのを許可する。これにより、油圧ショベル1の作業状態が走行動作、旋回動作、作業動作のいずれかに切り換わると、モニタ装置31は、作業状態に応じて標準画面34から走行用画面35、作業用画面36、旋回用画面37のいずれかに切り換わる。
モニタ装置31は、モニタ画像処理装置28に接続され、カメラ25〜27が撮影した死角風景を表示する。モニタ装置31は、キャブ9の右窓13Bに重ね合わせた状態で右側面部13に取り付けられている。モニタ装置31は、例えば液晶パネルのように薄型の表示装置によって構成されている。図9ないし図16に示すように、モニタ装置31は、スタート画面33、標準画面34、走行用画面35、作業用画面36、旋回用画面37を有する。モニタ装置31は、モニタ画像処理装置28によって表示画面が制御され、スタート画面33、標準画面34、走行用画面35、作業用画面36、旋回用画面37のいずれかが表示される。
図9に示すように、スタート画面33は、各種の初期設定を行うための画面である。このため、スタート画面33は、例えば車両の起動時にモニタ装置31に表示される。モニタ装置31は、タッチパネル32を備え、表示領域選択ボタン32A、死角対象物表示選択ボタン32B、補助情報表示選択ボタン32C、固定ON/OFFボタン32Dを有する。表示領域選択ボタン32A、死角対象物表示選択ボタン32B、補助情報表示選択ボタン32C、固定ON/OFFボタン32Dは、表示領域選択ボタン29A、死角対象物表示選択ボタン29B、補助情報表示選択ボタン29C、固定ON/OFFボタン29Dと同じ機能をそれぞれ有する。これらのボタン32A〜32Dは、スタート画面33に表示される。なお、スタート画面33は、車両の起動時に常に表示される必要はない。例えばオペレータOPが設定開始スイッチ(図示せず)等を操作して、各種の設定を希望するときだけ、スタート画面33がモニタ装置31に表示されてもよい。
図10に示すように、標準画面34は、例えば車両の停止時のように、走行動作、旋回動作、作業動作のいずれにも該当しないときに、モニタ装置31に表示される画面である。標準画面34は、初期状態では肉眼視同等の画像となっている。但し、標準画面34は、肉眼視同等の画像に限らず、表示領域選択ボタン29A,32Aを操作することによって、合成画像CI内でオペレータOPが希望する任意の範囲の画像とすることができる。また、標準画面34では、死角対象物表示選択ボタン29B,32Bによって、死角対象物である右前ピラー17、右後ピラー19、ブーム7Aの全部または一部を表示することができ、これら全部を非表示にすることもできる。
図11および図12に示すように、走行用画面35は、車両を走行動作させたときに、モニタ装置31に表示される画面である。走行動作では、車両の進行方向前側の状況を把握する必要がある。このため、走行用画面35は、右窓13Bを肉眼視したときの視野Vsに比べて、視野Vtを進行方向前側に拡大させた画像になっている。
図12は、図6に示す合成画像CIの一例に応じた走行用画面35を示している。この走行用画面35には、上部旋回体4の右側でブーム7Aの死角に位置するダンプトラックDTが表示される。これに加えて、走行用画面35には、右前ピラー17の死角に位置する土砂ESも含めて、上部旋回体4の右前側の風景も併せて表示される。走行用画面35には、死角対象物であるブーム7Aの像IMbおよびピラー17,19の像IMf,IMrが、その外形に沿った破線を用いて表示される。
図13および図14に示すように、作業用画面36は、車両を作業動作させたときに、モニタ装置31に表示される画面である。具体的には、例えば掘削作業、積込み作業等のように、作業装置7を俯仰動させたときに、作業用画面36は表示される。車両を作業動作させたときには、作業装置7の動作状況を把握する必要がある。このため、作業用画面36は、車外風景中に作業装置7の位置を明示した画像となっている。作業用画面36は、例えば右窓13Bを肉眼視したときの視野Vsと同等の視野Voに応じた画像になっている。
図14は、図6に示す合成画像CIの一例に応じた作業用画面36を示している。この作業用画面36には、上部旋回体4の右側でブーム7Aの死角に位置するダンプトラックDTが表示される。これに加えて、作業用画面36には、死角対象物である作業装置7のブーム7Aの像IMbが半透明な状態で表示される。他の死角対象物であるピラー17,19の像IMf,IMrは、その外形に沿った破線を用いて、作業用画面36に表示される。
図15および図16に示すように、旋回用画面37は、車両を旋回動作させたときに、モニタ装置31に表示される画面である。具体的には、車両を右旋回させたときに、旋回用画面37は表示される。車両を右旋回させるときには、上部旋回体4の右後方の状況を把握する必要がある。このため、旋回用画面37は、右窓13Bを肉眼視したときの視野Vsに比べて、視野Vrを旋回方向の前方となる右後側に拡大させた画像になっている。
図16は、図6に示す合成画像CIの一例に応じた旋回用画面37を示している。この旋回用画面37には、上部旋回体4の右側でブーム7Aの死角に位置するダンプトラックDTが表示される。これに加えて、旋回用画面37には、右後ピラー19の死角に位置する土砂ESも含めて、上部旋回体4の右後側の風景も併せて表示される。旋回用画面37には、死角対象物であるブーム7Aの像IMbおよびピラー17,19の像IMf,IMrが、その外形に沿った破線を用いて表示される。
次に、モニタ画像処理装置28が実行する画像切換え処理のプログラムについて、図7、図9ないし図16を用いて説明する。
例えばイグニションキー等によって車両を起動すると、画像処理プログラムが起動する。ステップ1では、モニタ装置31にスタート画面33を表示する(図9参照)。ステップ2では、標準画面設定処理を実行し、オペレータOPの要望に応じて標準画面34を設定する。具体的には、標準画面設定処理では、合成画像CI内で表示する画像の大きさや範囲、死角対象物の表示の有無、標準画面34を固定するか否かを設定する。
続くステップ3では、標準画面34が固定されているか否かを判定する。ステップ3で「YES」と判定したときには、標準画面34が固定された状態となっているので、ステップ4に移行して、固定状態表示部39を用いて、固定ボタンが「ON」状態である旨をモニタ装置31に表示する。続くステップ5では、図10に示す標準画面34をモニタ装置31に表示し、ステップ3以降を繰り返す。
一方、ステップ3で「NO」と判定したときには、標準画面34は固定されておらず、標準画面34からの切り換えが許可された状態になっている。このため、ステップ6に移行して、固定状態表示部39を用いて、固定ボタンが「OFF」状態である旨をモニタ装置31に表示する(図10参照)。
続くステップ7では、車両が走行状態か否かを判定する。具体的には、操作量センサ22Aの検出信号に基づいて、走行操作装置22によるパイロット圧が一定時間以上に亘って所定のしきい値を超えたか否かによって、走行動作しているか否かを判定する。なお、走行動作を判定するための一定時間およびパイロット圧のしきい値は、誤検出を抑制できる範囲で適宜設定される。
ステップ7で「YES」と判定したときには、車両は走行状態になっている。このため、ステップ8に移行して、走行用画面35をモニタ装置31に表示する(図11および図12参照)。これにより、モニタ装置31には、肉眼視同等となる上部旋回体4の右側の車外風景に、進行方向前方の車外風景を加えた画像が表示される。ステップ8が終了すると、ステップ3以降を繰り返す。
ステップ7で「NO」と判定したときには、車両は走行しておらず、下部走行体2は停止している。このため、ステップ9に移行して、車両が作業状態か否かを判定する。具体的には、操作量センサ24Aの検出信号に基づいて、作業操作装置24によるパイロット圧が一定時間以上に亘って所定のしきい値を超えたか否かによって、作業動作しているか否か、即ち作業装置7が俯仰動しているか否かを判定する。なお、作業動作を判定するための一定時間およびパイロット圧のしきい値は、誤検出を抑制できる範囲で適宜設定される。
ステップ9で「YES」と判定したときには、車両は作業状態になっており、作業装置7が駆動して、掘削作業等が行われている。このため、ステップ10に移行して、作業用画面36をモニタ装置31に表示する(図13および図14参照)。これにより、モニタ装置31には、肉眼視同等となる上部旋回体4の右側の車外風景に加えて、ブーム7Aの像IMbによって作業装置7の位置が明示された状態の画像が表示される。ステップ10が終了すると、ステップ3以降を繰り返す。
ステップ9で「NO」と判定したときには、作業装置7は停止している。このため、ステップ11に移行して、車両が旋回状態か否かを判定する。具体的には、操作量センサ23Aの検出信号に基づいて、旋回操作装置23によるパイロット圧が一定時間以上に亘って所定のしきい値を超えたか否かによって、上部旋回体4が旋回動作しているか否かを判定する。ここで、上部旋回体4は右旋回と左旋回が可能であるが、ステップ11では、キャブ9が作業装置7側に向けて移動するように、上部旋回体4が右旋回しているか否かを判定する。なお、旋回動作を判定するための一定時間およびパイロット圧のしきい値は、誤検出を抑制できる範囲で適宜設定される。
ステップ11で「YES」と判定したときには、車両は旋回状態になっており、旋回装置3が駆動して、上部旋回体4が右旋回している。このため、ステップ12に移行して、旋回用画面37をモニタ装置31に表示する(図15および図16参照)。これにより、モニタ装置31には、肉眼視同等となる上部旋回体4の右側の車外風景に、旋回方向の前方となる右後側の車外風景を加えた画像が表示される。ステップ12が終了すると、ステップ3以降を繰り返す。
ステップ11で「NO」と判定したときには、油圧ショベル1は走行動作、作業動作、旋回動作のいずれも行っていない。このため、ステップ13に移行して、標準画面34をモニタ装置31に表示し、ステップ3以降を繰り返す。
なお、上述の画像切換え処理では、走行動作、作業動作、旋回動作の順番で判定するものとしたが、これらの判定順序は適宜入れ換えてもよい。従って、例えば旋回ブーム上げ動作のように、作業動作と旋回動作とを同時に行う複合動作では、作業用画面36と旋回用画面37とのうちいずれの画面を表示してもよい。この点は、走行動作に作業動作や旋回動作が複合されたときでも同様である。また、例えば旋回ブーム上げ動作では、旋回ブーム上げ動作用の画面として、旋回用画面37に作業装置7の位置を明示した画像を表示してもよい。即ち、各種の複合動作では、複合動作専用の画面を表示してもよい。
次に、図7中の標準画面設定処理について、図8および図9を用いて説明する。
ステップ21では、表示領域選択処理を行う。このとき、オペレータOPは、表示領域選択ボタン29A,32Aを用いて、合成画像CIの範囲で、モニタ装置31の標準画面34に表示する画像の大きさや領域を選択する。これにより、オペレータOPは、標準画面34に表示する画像として、合成画像CIの全部または一部を選択することができる。
続くステップ22では、死角対象物表示選択処理を行う。このとき、オペレータOPは、死角対象物表示選択ボタン29B,32Bを用いて、モニタ装置31の標準画面34に死角対象物を表示するか否かを選択する。即ち、ステップ22では、死角対象物となる右前ピラー17、右後ピラー19、ブーム7Aの像IMf,IMr,IMbを表示するか否か選択する。このとき、右前ピラー17、右後ピラー19、ブーム7Aの像IMf,IMr,IMbは、これら全部の表示を選択することもでき、例えばブーム7Aの像IMbだけのように、一部だけの表示を選択することもできる。また、右前ピラー17、右後ピラー19、ブーム7Aの像IMf,IMr,IMbは、これら全部の非表示を選択することもできる。
続くステップ23では、補助情報表示選択処理を行う。このとき、オペレータOPは、補助情報表示選択ボタン29C,32Cを用いて、モニタ装置31の標準画面34に補助画面34Aを表示するか否かを選択する。これにより、車外風景の全体を確認したときには、補助画面34Aを消去して、車外風景の画像をモニタ装置31全体に表示することができる。一方、各種の情報を閲覧したいときには、補助画面34Aを表示させることができる。
続くステップ24では、画面固定選択処理を行う。このとき、オペレータOPは、固定ON/OFFボタン29D,32Dを用いて、モニタ装置31の標準画面34を固定するか否かを選択する。例えば作業状態に応じた視野の変更を希望しないときには、標準画面34を固定する。これにより、モニタ装置31には、作業状態が変化したときでも、例えば肉眼視同等となった標準画面34を継続して表示させることができる。一方、標準画面34を固定しないときには、作業状態に応じてモニタ装置31に表示する画面を切り換えることができる。
ステップ24が終了すると、標準画面34の設定が終了したので、リターンする。なお、表示領域選択処理、死角対象物表示選択処理、補助情報表示選択処理、画面固定選択処理には、処理順序の優劣はない。このため、これらの処理順序は適宜入れ換えてもよい。
本実施の形態による油圧ショベル1は上述の如き構成を有するもので、次に、この油圧ショベル1の動作について、図9ないし図16を用いて説明する。
まず、オペレータOPは、キャブ9に搭乗して運転席21に着座する。この状態で油圧ショベル1を起動すると、モニタ装置31には、図9に示すスタート画面33が表示される。このスタート画面では、オペレータOPは、標準画面34を設定する。具体的には、オペレータOPは、合成画像CI内で表示する画像の大きさや範囲、死角対象物の表示の有無、標準画面34を固定するか否かを設定する。
標準画面34の設定が終了すると、モニタ装置31は、スタート画面33から標準画面34に切り換わる(図10参照)。標準画面34では、オペレータOPの希望に応じた車外風景が表示される。また、標準画面34を非固定の状態にすると、油圧ショベル1の作業状態に応じて、モニタ装置31に表示される画面が切り換わる。標準画面34が非固定の場合では、油圧ショベル1の作業状態に応じて、標準画面34、走行用画面35、作業用画面36、旋回用画面37のうちいずれか1つの画面がモニタ装置31に表示される。
例えば、オペレータOPが走行操作装置22を操作すると、油圧ショベル1は走行動作し、例えばキャブ9の前方に向けて前進する。このとき、モニタ装置31には、図12に示す走行用画面35が表示される。図11および図12に示すように、走行用画面35は、肉眼視同等となる上部旋回体4の右側の車外風景に、進行方向前方の車外風景を加えた画像となっている。このため、オペレータOPは、モニタ装置31の走行用画面35を目視することによって、作業装置7等の死角の範囲内を含めて進行方向前側の障害物を把握することができる。
また、走行用画面35には、補助画面35Aとして、例えば作業現場の地図が表示される。これにより、オペレータOPは、例えば地形、障害物の有無等のような作業現場の状況を把握しながら、油圧ショベル1を移動させることができる。なお、走行用画面35の補助画面35Aは、標準画面34の補助画面34Aと同様に、表示の有無、表示位置、表示の大きさ等がスタート画面33で変更可能としてもよい。
一方、オペレータOPが作業操作装置24を操作すると、油圧ショベル1は作業動作し、作業装置7は俯仰動する。このとき、モニタ装置31には、図14に示す作業用画面36が表示される。図13および図14に示すように、作業用画面36は、肉眼視同等となる上部旋回体4の右側の車外風景に加えて、半透明なブーム7Aの像IMbによって作業装置7の位置が明示された状態の画像となっている。このため、オペレータOPは、モニタ装置31の作業用画面36を目視することによって、作業装置7の動作状況を把握することができる。
また、作業用画面36には、補助画面36Aとして、例えば掘削作業を行うときの掘削形状の図面や法面作業を行うときの法面形状の図面等が表示される。これにより、オペレータOPは、作業内容を把握しながら、作業装置7を動作させることができる。なお、作業用画面36の補助画面36Aは、標準画面34の補助画面34Aと同様に、表示の有無、表示位置、表示の大きさ等がスタート画面33で変更可能としてもよい。
さらに、オペレータOPが旋回操作装置23を操作すると、油圧ショベル1は旋回動作し、例えば上部旋回体4は右旋回する。このとき、モニタ装置31には、図16に示す旋回用画面37が表示される。図15および図16に示すように、旋回用画面37は、肉眼視同等となる上部旋回体4の右側の車外風景に、旋回方向の前方となる右後側の車外風景を加えた画像となっている。このため、オペレータOPは、モニタ装置31の旋回用画面37を目視することによって、旋回方向前側の障害物を把握することができる。
また、旋回用画面37には、補助画面37Aとして、例えば操作レバーの傾転方向と旋回方向の関係とを示す操作装置23,24の操作パターンが表示される。これにより、オペレータOPは、操作パターンが車両毎に異なるときでも、旋回操作の方法を容易に把握することができる。なお、旋回用画面37の補助画面37Aは、標準画面34の補助画面34Aと同様に、表示の有無、表示位置、表示の大きさ等がスタート画面33で変更可能としてもよい。
かくして、本実施の形態では、モニタ画像処理装置28(モニタ制御装置)は、モニタ装置31に表示する画像が変更可能な画像切換え処理を実行する。これにより、オペレータOPの視界と同一サイズの風景に限らず、例えば右前ピラー17を超えて前方に視界が拡大した画像、または、右後ピラー19を超えて後方に視界が拡大した画像をモニタ装置31に表示することができる。これに加えて、ピラー17,19部分の死角をなくした画像をモニタ装置31に表示することができる。このため、オペレータOPの操作または作業状況に応じた画像を、モニタ装置31に表示することができる。
また、画像切換え処理(画像切換え装置)では、操作装置22〜24の操作状態に応じて、モニタ装置31に表示する画像をそれぞれ切り換える。このため、モニタ画像処理装置28は、操作装置22〜24の操作状態に応じて、走行動作と、旋回動作と、作業動作とのうちいずれの作業状態であるかを把握することができる。この結果、画像切換え処理では、操作装置22〜24の操作状態に応じて、自動的にモニタ装置31の画像を切り換えることができ、作業状態に応じた画像をモニタ装置31に表示することができる。
さらに、画像切換え処理では、走行動作と、旋回動作と、作業動作とに応じて、モニタ装置31に表示する画像をそれぞれ切り換える。このため、走行動作するときには、モニタ画像処理装置28は、上部旋回体4の前側風景を含む走行用画面35をモニタ装置31に表示する。これにより、進行方向前側に視野Vtが拡大した走行用画面35をモニタ装置31に表示することができ、オペレータOPは、モニタ装置31を目視することによって、進行方向前側の対象物を視認することができる。
一方、旋回動作(右旋回動作)するときには、モニタ画像処理装置28は、上部旋回体4の後側風景を含む旋回用画面37をモニタ装置31に表示する。このため、旋回方向前側に視野Vrが拡大した旋回用画面37をモニタ装置31に表示することができ、オペレータOPは、モニタ装置31を目視することによって、旋回方向前側となる右後側の対象物を視認することができる。
さらに、作業動作するときには、モニタ画像処理装置28は、作業装置7の像IMbを含む作業用画面36をモニタ装置31に表示する。このため、車外風景中に作業装置7(ブーム7A)の像IMbを加えた作業用画面36をモニタ装置31に表示することができ、オペレータOPは、モニタ装置31を目視することによって、車外の状況に加えて、作業装置7の動作を把握することができる。
モニタ画像処理装置28は、モニタ装置31に車外風景とは異なる補助画面34A〜37Aを表示する。このため、補助画面34A〜37Aには、例えば作業現場の地図、法面画像等のように作業を補助する画面を表示することができ、補助画面34A〜37Aを省いた場合に比べて、作業効率を高めることができる。これに加えて、モニタ装置31には、作業を補助する補助画面34A〜37Aと併せて、監督者からの指示内容が記載された追加の補助画面を表示することもできる。
なお、実施の形態では、モニタ画像処理装置28は、3台のカメラ25〜27の撮影画像を用いて、標準画面34、走行用画面35、旋回用画面37、作業用画面36を生成するものとした。本発明はこれに限らず、モニタ画像処理装置28は、例えば1台または2台のカメラの撮影画像を用いて、各種の画面を生成してもよく、4台以上のカメラの撮影画像を用いて、各種の画面を生成してもよい。
実施の形態では、画像切換え処理では、走行動作、作業動作および旋回動作の3つの動作に応じて、モニタ装置31に表示する画面を切り換えるものとした。本発明はこれに限らず、例えば走行動作、作業動作、旋回動作のうちいずれか1つまたは2つの動作に応じて、モニタ装置31に表示する画面を切り換える構成としてもよい。
また、走行動作、作業動作および旋回動作の3つの動作に限らず、例えば吊荷動作を追加してもよい。この吊荷動作では、作業装置7の動作を把握するために、モニタ装置31には、作業用画面36と同様な吊荷用画面が表示される。これに加えて、吊荷用画面には、補助画面として、例えば操作装置22〜24の操作パターンや作業範囲と吊荷荷重の一覧が表示される。
さらに、走行動作は、前進動作と後進動作との2つの動作に分けてもよい。この場合、例えば前進用画面では、視野が前側に拡大した画像を表示し、後進用画面では、視野が後側に拡大した画像を表示してもよい。
同様に、旋回動作は、右旋回動作と左旋回動作との2つの動作に分けてもよい。この場合、例えば右旋回用画面では、視野が後側に拡大した画像を表示し、左旋回用画面では、視野が前側に拡大した画像や肉眼視同等の画像を表示してもよい。
実施の形態では、作業用画面36では、肉眼視と同等の画像を表示するものとした。本発明はこれに限らず、作業用画面36では、例えば右前ピラー17および右後ピラー19の死角部分まで視野を拡大した画像を表示してもよく、標準画面34と同様に合成画像CIから抽出した任意範囲の画像を表示してもよい。同様に、走行用画面35および旋回用画面37でも、オペレータOPの要求に応じて、合成画像CIから抽出した任意範囲の画像を表示してもよい。
実施の形態では、作業用画面36には、死角対象物である作業装置7のブーム7Aの像IMbが表示されるものとした。本発明はこれに限らず、作業用画面36には、アーム7B、バケット7Cを含めて作業装置7全体の像が表示されてもよい。この場合、モニタ画像処理装置28には、作業装置7の姿勢検出器として、ブーム角センサ7Gに加えて、アーム角センサ、バケット角センサが接続される。モニタ画像処理装置28は、これらのセンサから出力される傾斜角の検出結果に基づいて、ブーム7A、アーム7Bおよびバケット7Cの位置を特定し、作業装置7全体の像を作業用画面36に表示させる。同様に、走行用画面35、旋回用画面37にも、作業装置7全体の像が表示されてもよい。
実施の形態では、標準画面34は、標準画面設定処理でオペレータOPが設定した画面とした。本発明はこれに限らず、例えば標準画面34が表示された状態でモニタ装置31の画面をタップすることによって、標準画面設定処理が起動してもよい。また、モニタ装置31の画面(タッチパネル32)をフリックやスワイプすることによって、モニタ装置31に表示される車外風景の方向や範囲を、オペレータOPの操作に応じて変更してもよい。同様に、モニタ装置31の画面等を操作することによって、モニタ装置31に表示される車外風景を拡大または縮小する構成としてもよい。
実施の形態では、作業装置7の左側にキャブ9を設け、キャブ9内の右側面部13にモニタ装置31を設けるものとした。本発明はこれに限らず、キャブ9内の前面部10や後面部11にモニタ装置31を設けてもよいし、例えば作業装置の右側にキャブを設け、キャブ内の左側面部にモニタ装置を設けてもよい。また、キャブ9内にモニタ装置31を複数個設置してもよい。
モニタ装置31は、キャブ9内の右側面パネル13Aに固定的に取り付けられたものに限らず、例えば下側等に移動可能な構成としてもよい。この場合、右窓による肉眼視を希望するときには、モニタ装置31を右側面パネル13Aの下側に移動させることができる。
モニタ装置31は、液晶パネルに限らず、例えばプロジェクタとスクリーンとによって構成してもよい。この場合、モニタ装置を用いるときには、スクリーンによって右窓を塞ぎ、右窓による肉眼視を希望するときには、スクリーンをキャブの上側や後側に収容してもよい。また、モニタ装置は、電源OFFで透視可能な状態になってもよい。これにより、モニタ装置に電源が供給されない状態でも、キャブの右窓を通じて車外風景を目視確認することができる。
さらに、実施の形態では、建設機械としてクローラ式の油圧ショベル1を例に挙げて説明した。しかし、本発明はこれに限るものではなく、例えばホイール式の下部走行体を備えた油圧ショベルに適用してもよく、台船に旋回体を取付けた浚渫作業用の油圧ショベル、地面に固定されたポストに旋回体が取付けられた定置式の油圧ショベル等に適用してもよい。さらに、例えば油圧クレーン等の他の建設機械にも広く適用できるものである。