JP2016204065A - 重送検知装置、及び、これを有する搬送装置、画像形成装置 - Google Patents
重送検知装置、及び、これを有する搬送装置、画像形成装置 Download PDFInfo
- Publication number
- JP2016204065A JP2016204065A JP2015084303A JP2015084303A JP2016204065A JP 2016204065 A JP2016204065 A JP 2016204065A JP 2015084303 A JP2015084303 A JP 2015084303A JP 2015084303 A JP2015084303 A JP 2015084303A JP 2016204065 A JP2016204065 A JP 2016204065A
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- amplitude
- sheet
- ultrasonic wave
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Length Measuring Devices Characterised By Use Of Acoustic Means (AREA)
- Controlling Sheets Or Webs (AREA)
Abstract
【解決手段】重送検知装置は、原稿102の方向へ超音波を発信する超音波発信センサT1、発信された超音波を受信して受信信号を出力する超音波受信センサT2、AD変換回路、CPUを有する。AD変換回路は、超音波受信センサが出力する受信信号の振幅を取得する。CPUは、超音波発信センサと超音波受信センサとに挟まれた搬送路上に原稿が存在しない状態で超音波が発信されてから、AD変換回路が受信信号を受信するまでの時間に基づいて、超音波発信センサと超音波受信センサとに挟まれた搬送路上に原稿が存在する場合にAD変換回路が振幅を取得する際の振幅取得タイミングを制御する。また、CPUは、AD変換回路の取得結果が閾値を超えるか否かに応じて原稿が重送状態であるか否かを判別する。
【選択図】図3
Description
また、超音波センサ自身の発熱は微小であるが、超音波センサを画像読取装置、画像形成装置などの内部に配置する場合、その近傍に配置されるユニット(画像読み取り用の照明ユニット、定着ユニットなど)が発する熱の影響を受ける。そのため、超音波到達時間が変動してしまうことがある。そのほかにも、例えば定着ユニットを通過して搬送される用紙の熱による「あおり熱」を受けて、超音波センサ近傍の雰囲気温度が大きく変動することがあり、その結果、超音波到達時間が変動してしまうことがある。
例えば、センサ間の距離は外来ノイズ、発信センサの発信強度、発信センサと受信センサと搬送用紙による反射波などが検知に与える影響を鑑みると10〜30[mm]程度が望ましい。これに対しメカの取り付け精度は、装置の条件にも大きく関係するが特別な構成を用いずに配置をすると1〜2[mm]程度の公差を持つのが通常である。このように、上記の想定においては、装置によって超音波発信センサと超音波受信センサのメカ相対位置が最大で2割程度のバラつきが生じ得ることになる。つまり、超音波到達時間はメカ相対位置の影響を受けて2割程度変動し得る、ということになる。
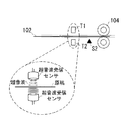
図1は、本実施形態に係る自動原稿搬送装置の構成の一例を説明するための図である。
自動原稿搬送装置100は、原稿トレイ101、給紙ローラ103、分離搬送ローラ104、分離搬送従動ローラ105、レジストローラ106、レジスト従動ローラ107、リードローラ108、リード従動ローラ109を含んで構成される。
なお、給紙ローラ103は、通常、ホームポジションである上方の位置に退避しており、原稿のセット作業を阻害しないような構成になっている。給紙ローラ103は、図示しないアームに軸支される。給紙動作が開始されると、アームが揺動することにより給紙ローラ103は下降して原稿102の上面に当接する。
リードローラ108およびリード従動ローラ109は、原稿102を画像読取装置115の流し読みガラス116に向けて搬送する。流し読みガラス116の対向側には、プラテンガイド110が配置されている。
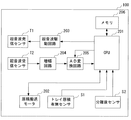
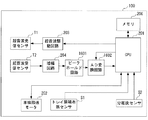
CPU(Central Processing Unit)201は、自動原稿搬送装置100が有する各機器の制御を行う。例えば、CPU201は、トレイ原稿有無センサS1、分離センサS2のセンサ出力の検出、超音波発信センサT1、超音波受信センサT2等の制御、AD変換回路205が行うAD変換のタイミング制御等を行う。原稿搬送モータ202は、自動原稿搬送装置100が有する各搬送ローラを駆動する。原稿搬送モータ202の起動開始、又は、その停止、単位時間当たりの回転数などは、CPU201により制御される。
超音波発信センサT1は、超音波駆動回路203からパルス信号(駆動信号)を受信し、受信したパルス信号に基づき超音波受信センサT2に向けて超音波を発信する。
また、CPU201は、AD変換回路205による受信信号の取得結果に基づいて搬送原稿が重送状態(搬送された原稿が複数枚重なっている状態)であるか、あるいは単送状態(搬送された原稿が1枚送りの状態)であるかを判別する。このように、CPU201は、原稿102の重送、あるいは単送を判別する判別手段として機能する。なお、メモリ206は、CPU201を介して各種情報を記憶する。
超音波発信センサT1から発せられた超音波が原稿102を透過して伝搬し、伝搬してきた超音波の強弱が超音波受信センサT2において電圧振幅に変換される。この変換結果は、増幅回路204により増幅された後にさらにAD変換回路205によりAD変換される。AD変換された結果は、CPU201に出力される。以下、搬送原稿が重送状態であるか、あるいは単送状態であるかを判別する方法について、図4を用いて詳細に説明する。
ここで、原稿102が搬送路117上で超音波発信センサT1、超音波受信センサT2の両センサ間に挟まれて存在する場合、超音波が原稿102を透過する際にこの超音波の振幅が大きく減衰する。さらにこの時、原稿102が重送状態である場合、この大きな減衰が複数回発生することになる(図4(b)参照)。そのため、重送状態の原稿102を透過した超音波の振幅は、原稿102が1枚(単送、図4(a)参照)のときと比べて大きく減衰することになる。振幅の減衰量が大きいほど受信信号の振幅も小さくなるため、この受信信号のレベルに基づき搬送原稿が重送状態であるか、又は、単送状態であるかを判別することができる。
超音波受信センサT2が出力する受信信号が伝達される増幅回路204は、受信信号の微小な信号を大きく増幅するために多段的に設けられた複数の増幅回路を含んで構成される。なお、本実施形態に係る増幅回路204は、複数の増幅回路として反転増幅回路501、502を含んで構成される。また、AD変換回路205は、後述する「原稿が無い状態(原稿無し時)」の際に用いるAD変換器503、「原稿が有る状態(原稿有り時)」の際に用いるAD変換器504を有する。
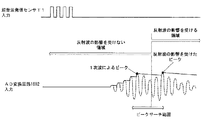
図6中の(a)に示す「超音波発信センサT1入力」は、超音波発信センサT1が超音波駆動回路203から受け取るパルス信号の波形を表している。
図6中の(b)は、「AD変換器504入力(原稿無し時)」において受信信号が飽和するという現象を表している。例えば、振幅の減衰量が少ない「原稿無し時」において増幅率が大きい回路を用いた場合に受信信号が飽和する、という現象が生じる。この場合、受信信号が飽和しているため、当該受信信号の振幅レベルを正しく検知することができない。
なお、ここでは、超音波到達時間は、超音波発信センサT1に入力される駆動パルスの1波目の立ち上がりタイミングから、AD変換器503及びAD変換器504の入力の受信信号の最初の最大振幅が現れるタイミング(ピークタイミング)までの時間と定義する。
なお、本実施形態では、閾値を所定の値に決定し、これに基づき搬送原稿が重送状態であるか、あるいは単送状態であるかを判別する場合を例に挙げて説明を進める。
図8(a)は、想定される条件の中で、超音波到達時間が相対的に短い状態における受信信号の波形を示す図である。例えば超音波センサの周囲温度が常温(25℃)に比べて高い状態、受信センサと発信センサの距離が設計上の呼称値に比べて短い(近い)状態における受信信号の波形を示す図である。図8(a)では、「原稿無し時」の受信信号の波形(AD変換器503入力)と「原稿有り時(単送)」の受信信号の波形(AD変換器504入力)とを対比可能に示している。
また、図8(b)は、想定される条件の中で、超音波到達時間が相対的に長い状態における受信信号の波形を示す図である。例えば超音波センサの周囲温度が常温に比べて低い状態、受信センサと発信センサの距離が設計上の呼称値に比べて長い(遠い)状態における受信信号の波形を示す図である。図8(b)においても、「原稿無し時」の受信信号の波形(AD変換器503入力)と「原稿有り時(単送)」の受信信号の波形(AD変換器504入力)とを対比可能に示している。
CPU201は、原稿102の搬送開始(読み取り開始)の指示の受け付けを契機に、超音波駆動回路203に対して超音波を発信するためのパルス信号(駆動信号)を出力する。そして、超音波発信センサT1は、超音波駆動回路203からの駆動信号を受信し、受信した駆動信号に基づき超音波受信センサT2に向けて超音波を発信する。このようにして、CPU201は、「原稿無し時」の受信信号の振幅レベル検知を開始する(S901)。
CPU201は、AD変換開始信号をAD変換回路205へ出力する。AD変換回路205は、AD変換器503によりAD変換を行い、変換結果をCPU201へ出力する。CPU201は、AD変換回路205の出力結果に基づき受信信号の振幅値を算出し、その結果をメモリ206に記憶する(S902)。
なお、この時のAD変換開始タイミングは、使用する装置において最も超音波到達時間が短くなる条件下における受信信号の振幅ピーク位置が発生するタイミングであり、あらかじめ実験等で決定しておくものである。以下、図10を用いて受信信号の振幅値の算出例について説明する。
AD変換回路205は、CPU201からAD変換開始信号を受信したことを契機に、増幅回路204を介して増幅された受信信号に対して離散的にサンプリングを行う。離散的にサンプリングを行う範囲は、受信信号の波形における任意の1周期分の期間である。例えば、本実施形態では、300[KHz]で超音波を駆動する場合、1周期は3.3[μs]になる。
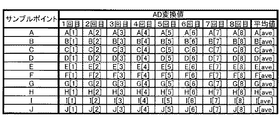
ただし、前述した通り、超音波受信センサT2の出力は微小であり、且つ、増幅回路204において大きな増幅を行っているため、外来ノイズによる影響も大きい。そのため、超音波受信センサT2の駆動を複数回(例えば、N=8回)行い、その平均値を用いて振幅値を算出するように構成することが望ましい。また、各サンプリング毎のサンプルポイント(図10中の拡大部、サンプルポイントA〜J)を設定する。このような条件のもとでサンプリングした複数の結果を平均化して、振幅値を算出する。以下、この点について、図11を用いて説明する。
図11に示すように、サンプルポイント毎に行った複数回のサンプリング結果の平均値を算出する(例えば サンプルポイントAではA[1]〜A[8]の値の平均値)。そして、サンプルポイント毎に平均化した10点(サンプルポイントA〜J)の内の最大値と最小値の差分を「受信波振幅レベル」とする。例えば、図11に示す各値に基づく受信波振幅レベルは、下記の式(1)で表わすことができる。
B[ave], C[ave], D[ave], E[ave], F[ave], G[ave], H[ave], I[ave], J[ave])−MIN(A[ave], B[ave], C[ave], D[ave], E[ave],
F[ave], G[ave], H[ave], I[ave], J[ave])・・・式(1)
予め定められた「最大到達時間」とは、使用する装置において最も超音波到達時間が長くなる条件下における受信信号の振幅ピーク位置が発生するタイミングであり、あらかじめ実験等で決定しておくものである。
以下、受信信号に対するサンプリングについて詳細に説明する。
本実施形態に係る自動原稿搬送装置100では、図12に示すサンプルタイミング1〜4のように、1回につきAD変換開始タイミングを超音波の1周期分(3.3[μs])遅らせながら受信信号の振幅(ピーク値(1)〜(4))を繰り返し取得する。
つまり、超音波到達時間が最も短い状態における受信信号のピーク位置が発生するタイミング(図8のピーク位置(A))から、最も長い状態における受信信号のピーク位置が発生するタイミング(図8のピーク位置(B))までの間繰り返される。このようにして、受信信号のサンプリングが行われる。
なお、ピーク位置は、複数回行ったサンプリングのうち受信信号から最大の振幅を取得したタイミングとする。この点を図13を用いて説明する。
図13に示すように、サンプルタイミング位置の3回目の受信信号のピーク値が最も大きいので、3回目の受信信号がピーク位置(受信波ピーク位置)となり、これに対応する振幅値が「原稿無し時」のピーク時振幅値となる。即ち、原稿有り時のサンプルタイミングとなる。また、本実施形態の説明では、AD変換開始タイミングを一定値ずつ遅らせながら複数回振幅を取得する場合について説明した。この他、CPU201のRAM容量やメモリ容量に余裕がある場合、一時に複数位置において振幅を取得するように構成してもよい。
JOB開始が指示された場合(S907:Yes)、CPU201は、原稿搬送モータ202の駆動開始を指示し、原稿102の給紙、搬送を開始する。
CPU201は、分離センサS2を介して、原稿102が分離部を通過したことを検知した後(S908)、超音波発信センサT1、超音波受信センサT2に挟まれた搬送路上に原稿102の先端が侵入するまでの所定時間を待機する(S909)。
CPU201は、ステップS906の処理において決定した「原稿有り時」のAD変換開始タイミングに基づき、AD変換開始信号をAD変換回路205へ出力する。AD変換回路205は、AD変換器504によりAD変換を行い、変換結果をCPU201へ出力する。CPU201は、AD変換回路205の出力に基づき受信信号の振幅値を算出する。このようにして、CPU201は、「原稿有り時」の検知を実施する(S910)。なお、この場合の振幅値の算出方法は、「原稿無し時」の場合と同様の算出方法である。
CPU201は、原稿102が重送状態であるか、あるいは単送状態であるかを判別する(S911)。具体的には、CPU201は「原稿有り時」の振幅値が、メモリ206に記憶された「原稿無し時」のピーク時振幅値に基づき決定した閾値を超える場合には単送状態と判別する。また、下回る場合には重送状態であると判別する。
また、「重送」、「単送」を判別するための閾値は、「原稿無し時」のピーク時振幅値に任意の係数をかけたものである。
なお、この閾値は、装置において想定される搬送原稿の内、単送状態で最も超音波の減衰率の高いものにマージンをかけたものである。そのため、装置においていかなる原稿であっても単送状態で搬送されていれば受信信号の振幅レベルがこれを下回ることは無い。
これにより、「超音波センサの周囲温度」、「検知時の受信センサと発信センサのメカ的相対位置」などの要因による超音波到達時間の変化によって生じる重送検知の精度低下を抑制することができる。なお、「原稿無し時」の検知結果に基づく振幅取得タイミングの調整は、原稿102の通紙直前に行うことが望ましい。
第1実施形態では、受信信号の最大振幅が現れる位置をピーク位置とする場合について説明した。例えば、装置において超音波到達時間の最小値と最大値との差が大きい場合、サンプリング結果に反射波の影響が及ぶ可能性がある。反射波の影響を受けたときに発生する受信信号のピーク位置は、「原稿無し時」と「原稿有り時」との相関関係がない。この点を踏まえ、本実施形態では受信信号の最初の最大振幅が現れる位置(ピーク位置)をより正確に特定することができる自動原稿搬送装置について説明する。なお、第1実施形態において説明した機能・構成と同じものは、同一の符号を付すとともにその説明を省略する。
図14中の反射波の影響を受ける領域の受信信号は、超音波発信センサT1から直接超音波受信センサT2に到達する超音波(1次波と称す)と、超音波センサ周辺の部材に反射して超音波受信センサT2に到達する超音波とが重畳して現れる。超音波センサ周辺の部材は、例えば搬送路を形成する板金、モールドなどである。このような場合、受信信号の波形が安定せず繰り返し再現性が低いため、この領域の受信信号を用いた場合、重送検知の精度が低下してしまうことになる。
そのため、重送検知では反射波の影響を受けない波形、つまり図14中の反射波の影響を受けない領域」における受信信号を用いて行うことが必要となる。このような場合、「原稿無し時」のピーク位置の決定について図15を用いて説明する。
「原稿無し時」のピーク位置の決定は、まず、AD変換開始タイミングが早い順に直近のサンプリング結果の振幅値と、次のサンプリング結果の振幅値とを比較する。そして、以下に示す条件1、条件2を初めて満足させるタイミング位置が「原稿無し時」のピーク位置(受信波ピーク位置)となり、これに対応する振幅値が「原稿無し時」のピーク時振幅値となる。
条件2:直近のサンプリング結果の振幅値よりも次のサンプリング結果の振幅値が小さいこと(例えば、図15中に示す3回目のサンプリング結果の振幅値>4回目のサンプリング結果の振幅値)。
また、上述では高速なAD変換回路を用いた構成での説明を行った。これに限らず、より安価なAD変換回路、例えば超音波センサの駆動1回に対し1度しかAD変換ができないような構成である場合であっても適用することができる。
以下、より安価なAD変換回路を用いた場合の構成例について説明する。
この場合、ピークホールド回路1601の出力値を受信信号の振幅値と同じ値にする。これにより、高速なAD変換を行うことなく搬送原稿に対する重送検知が可能となる。
より安価なAD変換回路1602を用いる場合であっても、図14を用いて説明した制御と同様の制御を行うことにより、超音波到達時間の変化によって生じる重送検知の精度低下を抑制することができる。
Claims (9)
- シートの搬送路を挟んだ一方に設置され、前記シートへ超音波を発信する超音波発信手段と、
前記搬送路を挟んだ他方に設置され、前記超音波発信手段の発信する前記超音波を受信して受信信号を出力する超音波受信手段と、
前記超音波受信手段が出力する受信信号を受信してその振幅を取得する取得手段と、
前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在しない状態で当該超音波発信手段により超音波が発信されてから、前記取得手段が前記受信信号を受信するまでの時間に基づいて、前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在する場合に前記取得手段が振幅を取得する際の振幅取得タイミングを決定する決定手段と、
前記取得手段の取得結果が所定の値を超えるか否かに応じて複数のシートが重なって搬送される重送状態が生じているか否かを判別する判別手段と、を有することを特徴とする、
重送検知装置。 - 前記決定手段は、前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在しないときに、前記取得手段が受信信号から最大の振幅を取得したタイミングを前記振幅取得タイミングとして決定することを特徴とする、
請求項1に記載の重送検知装置。 - 前記判別手段は、前記取得手段の取得結果が所定の値を超える場合に前記シートが単送状態であると判別し、当該所定の値を下回る場合に当該シートが重送状態であると判別することを特徴とする、
請求項1又は2に記載の重送検知装置。 - 前記決定手段は、前記取得手段が直近に取得した振幅と次に取得した振幅とを比較し、比較の結果、当該直近の振幅よりも当該次の振幅が小さい場合であり、且つ、これらの中で最も早く振幅が取得されたタイミングを前記振幅取得タイミングとして決定することを特徴とする、
請求項1、2又は3に記載の重送検知装置。 - 前記超音波受信手段が出力する受信信号を増幅する増幅手段を有し、
前記取得手段は、前記増幅手段により増幅された受信信号の振幅を取得することを特徴とする、
請求項1乃至4いずれか一項に記載の重送検知装置。 - 前記決定手段は、前記取得手段の取得結果に基づき振幅の大きさを表す振幅値を算出することを特徴とする、
請求項1乃至5いずれか一項に記載の重送検知装置。 - 前記所定の値は、前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在しない状態で前記取得手段が取得した最大の振幅から算出された振幅値に基づき決定されることを特徴とする、
請求項6に記載の重送検知装置。 - シートを搬送する搬送機構を有する搬送装置であって、
前記シートの搬送路を挟んだ一方に設置され、前記シートの方向へ超音波を発信する超音波発信手段と、
前記シートの搬送路を挟んだ他方に設置され、前記超音波発信手段の発信する前記超音波を受信して受信信号を出力する超音波受信手段と、
前記超音波受信手段が出力する受信信号を受信してその振幅を取得する取得手段と、
前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在しない状態で当該超音波発信手段により超音波が発信されてから、前記取得手段が前記受信信号を受信するまでの時間に基づき、前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在する場合に前記取得手段が振幅を取得する際の振幅取得タイミングを決定する決定手段と、
前記取得手段の取得結果が所定の値を超えるか否かに応じて前記シートが重送状態であるか否かを判別する判別手段と、を有することを特徴とする、
搬送装置。 - シートを搬送する搬送機構を有する画像形成装置であって、
前記シートの搬送路を挟んだ一方に設置され、前記シートの方向へ超音波を発信する超音波発信手段と、
前記シートの搬送路を挟んだ他方に設置され、前記超音波発信手段の発信する前記超音波を受信して受信信号を出力する超音波受信手段と、
前記超音波受信手段が出力する受信信号を受信してその振幅を取得する取得手段と、
前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在しない状態で当該超音波発信手段により超音波が発信されてから、前記取得手段が前記受信信号を受信するまでの時間に基づき、前記超音波発信手段と前記超音波受信手段とに挟まれた搬送路上に前記シートが存在する場合に前記取得手段が振幅を取得する際の振幅取得タイミングを決定する決定手段と、
前記取得手段の取得結果が所定の値を超えるか否かに応じて前記シートが重送状態であるか否かを判別する判別手段と、を有することを特徴とする、
画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015084303A JP2016204065A (ja) | 2015-04-16 | 2015-04-16 | 重送検知装置、及び、これを有する搬送装置、画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015084303A JP2016204065A (ja) | 2015-04-16 | 2015-04-16 | 重送検知装置、及び、これを有する搬送装置、画像形成装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016204065A true JP2016204065A (ja) | 2016-12-08 |
| JP2016204065A5 JP2016204065A5 (ja) | 2018-05-24 |
Family
ID=57488823
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015084303A Pending JP2016204065A (ja) | 2015-04-16 | 2015-04-16 | 重送検知装置、及び、これを有する搬送装置、画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016204065A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018108887A (ja) * | 2017-01-06 | 2018-07-12 | キヤノン株式会社 | 搬送装置、及び、これを有する読取装置、画像形成システム |
| JP2020186092A (ja) * | 2019-05-14 | 2020-11-19 | 京セラドキュメントソリューションズ株式会社 | シート搬送装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000025986A (ja) * | 1998-07-14 | 2000-01-25 | Matsushita Electric Ind Co Ltd | 超音波を利用したシート材の重送検知方法 |
| JP2011157141A (ja) * | 2010-01-29 | 2011-08-18 | Canon Electronics Inc | 重送検知装置、及び重送検知方法、並びにシート処理装置 |
-
2015
- 2015-04-16 JP JP2015084303A patent/JP2016204065A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000025986A (ja) * | 1998-07-14 | 2000-01-25 | Matsushita Electric Ind Co Ltd | 超音波を利用したシート材の重送検知方法 |
| JP2011157141A (ja) * | 2010-01-29 | 2011-08-18 | Canon Electronics Inc | 重送検知装置、及び重送検知方法、並びにシート処理装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018108887A (ja) * | 2017-01-06 | 2018-07-12 | キヤノン株式会社 | 搬送装置、及び、これを有する読取装置、画像形成システム |
| US10730712B2 (en) | 2017-01-06 | 2020-08-04 | Canon Kabushiki Kaisha | Conveyance apparatus, reading apparatus, image forming apparatus and image forming system |
| JP2020186092A (ja) * | 2019-05-14 | 2020-11-19 | 京セラドキュメントソリューションズ株式会社 | シート搬送装置 |
| JP7290063B2 (ja) | 2019-05-14 | 2023-06-13 | 京セラドキュメントソリューションズ株式会社 | シート搬送装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6622517B2 (ja) | シート搬送装置および画像読取装置 | |
| JP2017039589A (ja) | シート給送装置 | |
| JP2015037982A (ja) | 原稿搬送装置、ジャム判定方法及びコンピュータプログラム | |
| JP2017043470A5 (ja) | ||
| JP3860126B2 (ja) | 重送検知装置及び重送検知方法 | |
| US20140327925A1 (en) | Paper conveying apparatus | |
| US10730712B2 (en) | Conveyance apparatus, reading apparatus, image forming apparatus and image forming system | |
| US20240025684A1 (en) | Sheet conveying apparatus and image reading apparatus | |
| JP6579939B2 (ja) | 重送検出装置、重送検出方法及び制御プログラム | |
| JP6934820B2 (ja) | 重送検出装置、重送検出方法及び制御プログラム | |
| JP2016204065A (ja) | 重送検知装置、及び、これを有する搬送装置、画像形成装置 | |
| JP5404871B1 (ja) | 用紙搬送装置、ジャム判定方法及びコンピュータプログラム | |
| JP2019119578A (ja) | 検知装置、画像読取装置、検知方法 | |
| JP4691676B2 (ja) | シートの重送検知方法及び給紙装置 | |
| JP2018162154A (ja) | 搬送装置、及び、これを有する読取装置、画像形成システム | |
| JP2017149504A (ja) | 媒体搬送装置、画像読取装置、重送判定方法及び重送判定プログラム | |
| JP2009096613A (ja) | 画像読取装置および搬送状態検知方法 | |
| JP6809210B2 (ja) | 重送検知装置およびその制御方法、並びに画像形成装置 | |
| JP2020132373A (ja) | シート搬送装置、画像読取装置、シート搬送方法 | |
| JP6814270B2 (ja) | シート搬送装置および画像読取装置 | |
| JP2019123603A (ja) | シート搬送装置、シート搬送装置の制御方法およびプログラム | |
| JP7023651B2 (ja) | 重送検知装置、画像読取装置、重送検知方法 | |
| JP6796262B2 (ja) | 画像形成装置 | |
| JP2008211459A (ja) | 原稿読取装置 | |
| JP6796263B2 (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180406 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180406 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190226 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190903 |