以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
<1.第1の実施形態>
まず、図1を参照して、本発明の各実施形態に係る車両1000の構成について説明する。図1は、本実施形態に係る車両1000を示す模式図である。図1に示すように、車両1000は、前輪100,102、後輪104,106、前輪100,102及び後輪104,106のそれぞれを駆動する駆動力発生装置(モータ)108,110,112,114、前輪100,102及び後輪104,106のそれぞれの車輪速を検出する車輪速センサ116,118,120,122、ステアリングホイール124、舵角センサ130、パワーステアリング機構140、ヨーレートセンサ150、加速度センサ160、外界認識部170、制御装置(コントローラ)200を有して構成されている。
本実施形態に係る車両1000は、前輪100,102及び後輪104,106のそれぞれを駆動するためにモータ108,110,112,114が設けられている。このため、前輪100,102及び後輪104,106のそれぞれで駆動トルクを制御することができる。従って、前輪100,102の操舵によるヨーレート発生とは独立して、前輪100,102及び後輪104,106のそれぞれを駆動することで、トルクベクタリング制御によりヨーレートを発生させることができる。特に、本実施形態では、後輪104,106のトルクを個別に制御することで、ハンドル操舵系とは独立してヨーレートを発生させる。後輪104,106は、制御装置200の指令に基づき、後輪104,106に対応するモータ112,114が制御されることで、駆動トルクが制御される。
パワーステアリング機構140は、ドライバーによるステアリングホイール124の操作に応じて、トルク制御又は角度制御により前輪100,102の舵角を制御する。舵角センサ130は、運転者がステアリングホイール124を操作して入力した舵角θhを検出する。ヨーレートセンサ150は、車両1000の実ヨーレートγを検出する。車輪速センサ116,118,120,122は、車両1000の車両速度Vを検出する。
なお、本実施形態はこの形態に限られることなく、前輪100,102を駆動するモータ108,102が設けられておらず、後輪104,106のみがモータ112,114で独立して駆動力を発生する車両であっても良い。また、本実施形態は、駆動力制御によるトルクベクタリングに限定されるものではなく、後輪の舵角を制御する4WSのシステム等においても実現可能である。
図2は、本実施形態に係る車両1000が行う旋回制御を示す模式図であって、操舵による旋回制御(操安制御)を示す模式図である。操舵による旋回制御では、ドライバーによるステアリングホイール124の操作に応じて後輪104,106に駆動力差を生じさせることで、車両1000の旋回を支援する。図2に示す例では、ドライバー(運転者)の操舵により車両1000が左に旋回している。また、後輪104,106の駆動力差によって、右側の後輪106に前向きの駆動力を発生させ、左側の後輪104には右側の後輪106に対して駆動力を抑制、または後ろ向きに駆動力を発生させることで、左右に駆動力差を発生させ、左回りの旋回を支援する方向にモーメントを発生させている。
本実施形態では、車両の運動制御において、車両モデルから求まるヨーレートモデル値とヨーレートセンサから求まる実ヨーレートとの差分から、車両の旋回特性を推定し、差分が小さいときにはタイヤのグリップ性能が十分確保されている安定領域(高μ)にあるものと判定し、その状況に応じた制御目標ヨーレートを演算する。
また、ヨーレートモデル値と実ヨーレートとの差分が大きい時には、タイヤのグリップ性能が確保しづらく車両の応答限界に達しやすい領域(低μ)と判別し、その状況に応じた制御目標ヨーレートを演算する機能を有する「目標スタビリティファクタ」を算出する。
更に、車両の旋回特性に応じて、操縦安定制御で用いる制御目標モーメントを補正する係数を算出する機能も有しており、定常項を補正する係数と、過渡項を補正する係数を走行状況に応じて変化させることで、旋回時の回頭性能と安定性能の両立を図る。以下、詳細に説明する。
図3は、制御装置200の構成を示す模式図である。制御装置200は、車載センサ210、操安制御部220、制御目標モーメント演算部250、第2制御目標モーメント演算部270、モータ要求トルク演算部280を有している、操安制御部220は、補正処理部222、車両モデル224、フィルタ処理部226、減算部228、制御目標ヨーレート演算部230、フィードバックヨーレート演算部232、減算部233、第1制御目標モーメント演算部234を有している。
制御目標モーメント演算部250は、車速可変ゲイン演算部252、及び調停部254を有している。
図4は、本実施形態で行われる基本的な処理を示すフローチャートである。先ず。ステップS10では、車両モデル224から求まるヨーレートモデル値γ_clcとヨーレートセンサ150が検出した実ヨーレートγから求まるヨーレートγ_filとの差分(ヨーレート偏差)γ_diffを算出する。次のステップS12では、目標スタビリティファクタSfTgを算出する。次のステップS14では、目標スタビリティファクタSfTgtに基づいて、制御目標ヨーレートγ_Tgtを算出する。次のステップS16では、γ_diffに基づいてγ_clcとγ_filを按分し、フィードバックヨーレートγ_F/Bを算出する。次のステップS17では、制御目標ヨーレートγ_Tgtとフィードバックヨーレートγ_F/Bとの差分に基づいて、第1制御目標モーメントMg1を算出する。次のステップS18では、アッカーマンジオメトリに基づいて、第2制御目標モーメントMg2を算出する。次のステップS19では、第1制御目標モーメントMg1と第2制御目標モーメントMg2とに基づいて、制御目標モーメントMgTgtを算出する。
図5は、制御装置200で行われる処理を説明するための模式図である。なお、図5は、図3と同様に制御装置200の構成要素を示すとともに、各構成要素が行う処理を詳細に示したものである。以下では、図3〜図5に基づいて、制御装置200で行われる処理について説明する。車載センサ210は、上述した舵角センサ130、ヨーレートセンサ150、加速度センサ160、車輪速センサ116,118,120,122を含む。
制御用目標ヨーレート演算部230は、一般的な平面2輪モデルを表す以下の式(1)から操安制御用目標ヨーレートγ_Tgtを算出する。操安制御用目標ヨーレートγ_Tgtは、平面2輪モデルの式(1)における車両ヨーレートγに相当し、式(1)の右辺に各値を代入することによって算出される。
なお、式(1)〜式(3)において、変数、定数は以下の通りである。
<変数>
γ:車両ヨーレート
V:車両速度
δ:タイヤ舵角
θh:ハンドル操舵角
<定数>
l:車両ホイールベース
lf:車両重心点から前輪中心までの距離
lr:車両重心点から後輪中心までの距離
m:車両重量
kf:コーナリングパワー(フロント)
kr:コーナリングパワー(リア)
Gh:ハンドル操舵角からタイヤ舵角への変換ゲイン(ステアリングギヤ比)
制御用目標ヨーレートγ_Tgt(式(1)の左辺のγ)は、車両速度V、及びタイヤ舵角δを変数として、式(1)から算出される。式(1)のタイヤ舵角δは、直接センシングできないため、制御目標ヨーレート演算部230のタイヤ舵角換算処理部230aは、式(2)から、ハンドル操舵角θhに変換ゲインGhを乗じることタイヤ舵角δを算出する。なお、ステアリングの運動モデルに基づいてタイヤ舵角δを算出しても良い。変換ゲインGhとして、ステアリングギア比が用いられる。式(1)における目標スタビリティファクタSfTgtは一般的には車両の特性を表す定数Aとして式(3)から算出されるが、本実施形態では、補正処理部222が目標スタビリティファクタSfTgtを補正する。制御目標ヨーレート演算部230のγ_Tgt演算部230bは、タイヤ舵角換算処理部230aが算出したタイヤ舵角δを用いて、(1)式から制御用目標ヨーレートγ_Tgtを算出する。制御用目標ヨーレートγ_Tgtは、減算部233へ入力される。
一方、車両モデル224、フィルタ処理部226では、車両1000が発生しているヨーレートを計算又は実測により求める。車両モデル224は、車両ヨーレートを算出するための車両モデル(平面2輪モデル)を表す以下の式から、ヨーレートモデル値γ_clcを算出する。具体的には、以下の式(4)、式(5)へ車両速度V、ステアリングの操舵角θhを代入し、式(4)、式(5)を連立して解くことで、ヨーレートモデル値γ_clc(式(4)、式(5)におけるγ)を算出する。なお、式(4)、式(5)から式(1)を導出することができるため、車両モデル224は、操舵角θhと車両速度Vとに基づき、制御用目標ヨーレート演算部230と同様の手法により車両モデルの式(1)からヨーレートモデル値γ_clcを算出しても良い。
なお、式(4)〜式(5)において、Iは車両のヨー慣性、βは車両の横滑り角である。
ヨーレートモデル値γ_clcはフィードバックヨーレート演算部232へ入力される。フィルタ処理部226は、ヨーレートセンサ150が検出した実ヨーレートγに対してノイズを除去するためにフィルタ処理を行い、フィルタ処理の結果得られたヨーレートγ_filをフィードバックヨーレート演算部232へ入力する。
減算部228は、ヨーレートモデル値γ_clcからヨーレートγ_filを減算し、ヨーレートモデル値γ_clcとヨーレートγ_filとの差分γ_diffを求める。差分γ_diffは、フィードバックヨーレート演算部232へ入力される。ここで、差分γ_diffは路面状況を表すパラメータに相当するため、減算部228は路面状況を表すパラメータを取得する構成要素に相当する。
以上にようにして、フィードバックヨーレート演算部232には、ヨーレートモデル値γ_clc、ヨーレートγ_fil、差分γ_diffが入力される。フィードバックヨーレート演算部232は、ヨーレートモデル値γ_clcと実ヨーレートγ_filとの差分γ_diffに基づいて、差分γ_diffに応じて変化する重み付けゲインκを算出する。そして、フィードバックヨーレート演算部232は、以下の式(6)に基づき、ヨーレートモデル値γ_clcとヨーレートγ_filを重み付けゲインκによって重み付けし、フィードバックヨーレートγ_F/Bを算出する。算出されたフィードバックヨーレートγ_F/Bは、減算部233へ入力される。
γ_F/B=κ×γ_clc+(1−κ)×γ_fil ・・・・(6)
図6は、フィードバックヨーレート演算部232が重み付けゲインκを算出する際のゲインマップを示す模式図である。図6に示すように、重み付けゲインκの値は、車両モデル224の信頼度に応じて0から1の間で可変する。車両モデル224の信頼度を図る指標として、ヨーレートモデル値γ_clcとヨーレートγ_filとの差分(偏差)γ_diffを用いる。図6に示すように、差分γ_diffの絶対値が小さい程、重み付けゲインκの値が大きくなるようにゲインマップが設定されている。フィードバックヨーレート演算部232は、差分γ_diffに図6のマップ処理を施し、車両モデル224の信頼度に応じた重み付けゲインκを演算する。
図6において、TH1_Pは重み付けゲインκの切り替えのしきい値(+側)、TH2_Pは重み付けゲインκの切り替えしきい値(+側)、TH1_Mは重み付けゲインκの切り替えしきい値(−側)、TH2_Mは重み付けゲインκの切り替えしきい値(−側)、をそれぞれ示している。なお、+側のしきい値の大小関係はTH1_P<TH2_Pとし、−側のしきい値の大小関係はTH1_M>TH2_Mとする。
図6において、TH1_Pは重み付けゲインκの切り替えのしきい値(+側)、TH2_Pは重み付けゲインκの切り替えしきい値(+側)、TH1_Mは重み付けゲインκの切り替えしきい値(−側)、TH2_Mは重み付けゲインκの切り替えしきい値(−側)、をそれぞれ示している。なお、+側のしきい値の大小関係はTH1_P<TH2_Pとし、−側のしきい値の大小関係はTH1_M>TH2_Mとする。
図6に示すゲインマップの領域A1は、差分γ_diffが0に近づく領域であり、S/N比が小さい領域や、タイヤ特性が線形の領域(ドライの路面)であり、車両モデル216から算出されるヨーレートモデル値γ_clcの信頼性が高い。このため、重み付けゲインκ=1として、式(7)よりヨーレートモデル値γ_clcの配分を100%としてフィードバックヨーレートγ_F/Bが演算される。これにより、ヨーレートγ_filに含まれるヨーレートセンサ150のノイズの影響を抑止することができ、フィードバックヨーレートγ_F/Bからセンサノイズを排除することができる。従って、車両1000の振動を抑制して乗り心地を向上することができる。
特に、運転支援制御では、車両1000がコーナーに進入する前の直進状態から、推定走行路に基づいて車両1000が旋回する量を予見的に制御する。従って、車両1000の旋回時のみならず、車両1000の直進状態においても、センサノイズの影響を排除することで、車両1000に振動を生じさせることなく、安定して直進させることが可能である。
このように、ヨーレートモデル値γ_clcの信頼度が高い領域は、差分γ_diffと走行状況から指定することができる。図6に示したように、ドライ路面(高μ)走行時であり、かつ転舵量が小さい場面(低曲率での旋回など)においては、重み付けゲインκが1となる様に差分γ_diffと重み付けゲインκを関係づけることが、マップによる係数設定の一例として想定される。なお、上述した平面2輪モデルは、タイヤのスリップ角と横加速度との関係(タイヤのコーナーリング特性)が線形である領域を想定している。タイヤのコーナーリング特性が非線形になる領域では、実車のヨーレートと横加速度が舵角やスリップ角に対して非線形になり、平面2輪モデルと実車でセンシングされるヨーレートとが乖離する。このため、タイヤの非線形性を考慮したモデルを使用すると、ヨーレートに基づく制御が煩雑になるが、本実施形態によれば、ヨーレートモデル値γ_clcの信頼度を差分γ_diffに基づいて容易に判定することが可能である。
また、図6に示すゲインマップの領域A2は、差分γ_diffが大きくなる領域であり、ウェット路面走行時、雪道走行時、または高Gがかかる旋回時などに相当し、タイヤが滑っている限界領域である。この領域では、車両モデル216から算出されるヨーレートモデル値γ_clcの信頼性が低くなり、差分γ_diffがより大きくなる。このため、重み付けゲインκ=0として、式(7)よりヨーレートγ_filの配分を100%としてフィードバックヨーレートγ_F/Bが演算される。これにより、ヨーレートγ_filに基づいてフィードバックの精度を確保し、実車の挙動を反映したヨーレートのフィードバック制御が行われる。従って、ヨーレートγ_filに基づいて車両1000の旋回を最適に制御することができる。また、タイヤが滑っている領域であるため、ヨーレートセンサ150の信号にノイズの影響が生じていたとしても、車両1000の振動としてドライバーが感じることはなく、乗り心地の低下も抑止できる。図6に示す低μの領域A2の設定については、設計要件から重み付けゲインκ=0となる領域を決めても良いし、低μ路面を実際に車両1000が走行した時の操縦安定性能、乗り心地等から実験的に決めても良い。
また、図6に示すゲインマップの領域A3は、線形領域から限界領域へ遷移する領域(非線形領域)であり、実車である車両1000のタイヤ特性も必要に応じて考慮して、ヨーレートモデル値γ_clcとヨーレートγ_filの配分(重み付けゲインκ)を線形に変化させる。領域A1(高μ域)から領域A2(低μ域)への遷移、ないし領域A2(低μ域)から領域A1(高μ域)へ遷移する領域においては、重み付けゲインκの急変に伴うトルク変動、ヨーレートの変動を抑えるため、線形補間で重み付けゲインκを演算する。
また、図6に示すゲインマップの領域A4は、ヨーレートγ_filの方がヨーレートモデル値γ_clcよりも大きい場合に相当する。例えば、車両モデル216に誤ったパラメータが入力されてヨーレートモデル値γ_clcが誤計算された場合等においては、領域A4のマップによりヨーレートγ_filを用いて制御を行うことができる。更に、領域A4のマップによれば、フィルタ処理に伴うヨーレートγ_filの位相遅れに起因して、一時的にヨーレートモデル値γ_clcがヨーレートγ_filよりも小さくなった場合においても、ヨーレートγ_filを用いて制御を行うことができる。なお、重み付けゲインκの範囲は0〜1の間に限定されるものではなく、車両制御として成立する範囲であれば任意の値を取れる様に構成を変更することも、本発明の技術で成し得る範疇に入る。
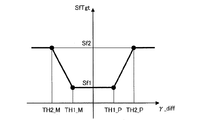
補正処理部222は、制御用目標ヨーレート演算部230が、式(1)〜(3)から制御用目標ヨーレートγ_Tgtを算出するに際し、目標スタビリティファクタSfTgtを補正する。図7は、目標スタビリティファクタSfTgtを算出するマップを示す特性図である。また、図8は、目標スタビリティファクタSfTgtを算出する処理を示すフローチャートである。図8の処理では、先ずステップS10において、γ_diff≧0であるか否かを判定し、γ_diff≧0の場合はステップS12へ進み、γ_diff≦TH1_Pであるか否かを判定する。そして、γ_diff≦TH1_Pの場合はステップS14へ進み、SfTgt=Sf1とする。
また、ステップS12でγ_diff>TH1_Pの場合はステップS16へ進み、γ_diff≧TH2_Pであるか否かを判定する。そして、γ_diff≧TH2_Pの場合はステップS18へ進み、SfTgt=Sf2とする。
また、ステップS16でγ_diff<TH2_Pの場合はステップS20へ進み、以下の式(7)からSfTgtを算出する。
また、ステップS10でγ_diff<0の場合はステップS22へ進み、γ_diff≧TH1_Mであるか否かを判定する。そして、γ_diff≧TH1_Mの場合はステップS24へ進み、SfTgt=Sf1とする。また、ステップS22でγ_diff<TH1_Mの場合はステップS26へ進み、γ_diff≦TH2_Mであるか否かを判定する。そして、γ_diff≦TH2_Mの場合はステップS28へ進み、SfTgt=Sf2とする。
また、ステップS26でγ_diff>TH2_Mの場合はステップS30へ進み、以下の式(8)からSfTgtを算出する。
図8の処理によれば、車両1000の状態量推定で用いる目標スタビリティファクタ(SfTgt)が、ヨーレートモデル値γ_clc(ヨーレート基準値)とヨーレートセンサ142の検出値をフィルタ処理して得られたヨーレートγ_filとの乖離度合い(γ_diff)に応じて可変される。差分γ_diffの絶対値が、基準値と検出値の乖離度合いが少ない側に設定したしきい値(TH1_M,TH1_P)の絶対値よりも小さい場合は、車両挙動が安定している高μ域、または通常領域であると判断し、車両1000の自転(ヨー運動)を促進するための目標スタビリティファクタ「Sf1(回頭性重視)」が設定される。また、差分γ_diffの絶対値が所定の閾値(TH2_M,TH2_P)よりも大きい場合は、低μ域、または限界領域であると判断し、車両1000の過度の自転(ヨー運度)を抑制し、旋回時の安定性能を確保するための目標スタビリティファクタ「Sf2(安定性重視)」が設定される。また、差分γ_diffの絶対値が、しきい値TH1_PとTH2_Pの間、または、しきい値TH1_MとTH2_Mの間の値をとる場合は、差分γ_diffの値に応じて「Sf1」と「Sf2」を補間して目標スタビリティファクタ「SfTgt」が設定される。
このように、差分γ_diffに基づいて車両の旋回特性を推定して目標スタビリティファクタSfTgtを補正することで、路面摩擦係数が高μになるほど制御目標ヨーレートγ_Tgtの値が大きくなり、車両旋回が促進される。また、路面摩擦係数が低μになるほど制御目標ヨーレートγ_Tgtの値が小さくなり、車両旋回が抑制される。従って、そのときの路面状況等に応じた最適な制御目標ヨーレートγ_Tgtを演算することができる。
減算部233には、制御目標ヨーレート演算部230から制御目標ヨーレートγ_Tgtが入力され、フィードバックヨーレート演算部232からフィードバックヨーレートγ_F/Bが入力される。減算部233は、制御目標ヨーレートγ_Tgtからフィードバックヨーレートγ_F/Bを減算し、γ_Tgtとγ_F/Bとの差分(ヨーレート補正量)Δγ_Tgtを求める。すなわち、差分Δγ_Tgtは、以下の式(9)から算出される。
Δγ_Tgt=γ_Tgt−γ_F/B ・・・・(9)
差分Δγ_Tgtは、第1制御目標モーメント演算部234へ出力される。
第1制御目標モーメント演算部234は、差分Δγ_Tgtに基づいて車両挙動を補正するためのモーメントを算出する。第1制御目標モーメント演算部234は、差分Δγ_Tgtを用いて、制御目標モーメントを算出するとともに、調整ゲインにより、制御目標モーメントを補正することで、低μ時の安定性確保と、高μ時の旋回支援制御を両立させ、車両旋回時における定常的な挙動と過渡的な挙動の双方の観点から操縦安定性能を制御する。このため、第1制御目標モーメント演算部234は、車両1000のヨーレートを収束させるためのパラメータである「目標減衰モーメントMgDampTgt」を算出する減衰制御モーメント演算部(定常項算出部)234aと、車両1000のヨー慣性を補償するパラメータである「目標慣性補償モーメントMgTransTgt」を算出する慣性補償モーメント演算部(過渡項演算部)234bとを有している。
減衰制御モーメント演算部(定常項算出部)234aは、公知の平面2輪モデル(ヨー運動)をヨーモーメントについて整理した式において、ヨーレートに掛かっている係数D1をΔγ_Tgtに乗じることで、車両旋回時の収束性能を向上させる「目標減衰モーメントMgDampTgt」の基本量MgDampBasisを演算する。ここで、係数D1は、(5)式でγに掛かっている2/V(lf 2Kf−lr 2Kr)に相当する。この際、減衰制御モーメント演算部(定常項算出部)234aは、目標減衰モーメントの基本量MgDampBasisに対して、ヨーレートの差分γ_diffに応じて路面状況を反映するように設定されたゲインを乗算することで、基本量MgDampBasisを補正し、「目標減衰モーメントMgDampTgt」を算出する。「目標減衰モーメントMgDampTgt」により、特に車両1000の定常的な挙動に対して、車両挙動を安定させることができる。
より詳細には、減衰制御モーメント演算部234aは、目標減衰モーメントを補正するゲインGainForMgDampを算出し、ヨーレートの差分γ_diffに応じてゲインGainForMgDampを可変させる機能を有する。また、減衰制御モーメント演算部234aは、差分γ_diffに基づいて、低μ域や限界領域に遷移しつつあると判断される場合は、ゲインを段階的に変化させるとともに、低μ域や限界領域に到達したと判断される場合には、車両の安定性能を重視するため、ゲインを負側に設定し旋回中に逆方向のモーメントを付加し、過度の車両1000の自転を抑制する制御を行う。
このため、減衰制御モーメント演算部234aは、先ず、Δγ_Tgtに係数D1を乗算して基本量MgDampBasisを算出する。そして、算出した基本量MgDampBasisと差分γ_diffに応じて変化する減衰モーメント補正ゲインGainForMgDampを乗算して目標減衰モーメントMgDampTgtを算出する。
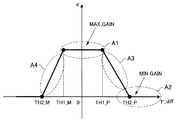
図9は、減衰モーメント補正ゲインGainForMgDampを算出するマップを示す特性図である。また、図10は、減衰モーメント補正ゲインGainForMgDampを算出する処理を示すフローチャートである。図10の処理では、先ずステップS40において、差分γ_diff≧0であるか否かを判定し、差分γ_diff≧0の場合はステップS42へ進み、0以上の値であるγ_diffの値に基づいて減衰モーメント補正ゲインGainForMgDampを算出する。また、差分γ_diff<0の場合はステップS44へ進み、0より小さい値であるγ_diffの値に基づいて減衰モーメント補正ゲインGainForMgDampを算出する。
図11は、γ_diff≧0の場合に減衰モーメント補正ゲインGainForMgDampを算出する処理を示すフローチャートである。γ_diff≧0の場合、図9に示すマップのうち、γ_diff≧0の領域の特性に従って減衰モーメント補正ゲインGainForMgDampが算出される。先ず、ステップS50では、γ_diff≦TH1_Pであるか否かを判定し、γ_diff≦TH1_Pの場合はステップS52へ進み、GainForMgDamp=MAX_GAINとする。一方、ステップS50でγ_diff>TH1_Pの場合はステップS54へ進み、γ_diff≦TH1_Pであるか否かを判定し、γ_diff≦TH1_Pの場合はステップS56へ進み、以下の式(10)から減衰モーメント補正ゲインGainForMgDampを算出する。
また、ステップS54でγ_diff>TH1_Pの場合はステップS58へ進み、γ_diff≦TH3_Pであるか否かを判定し、γ_diff≦TH3_Pの場合はステップS60へ進んでGainForMgDamp=MID_GAINとする。
また、ステップS58でγ_diff>TH3_Pの場合はステップS62へ進み、γ_diff≦TH4_Pであるか否かを判定し、γ_diff≦TH4_Pの場合はステップS64へ進んで以下の式(11)から減衰モーメント補正ゲインGainForMgDampを算出する。
また、ステップS62でγ_diff>TH4_Pの場合はステップS66へ進み、GainForMgDamp=MIN_GAINとする。
また、図12は、γ_diff<0の場合に減衰モーメント補正ゲインGainForMgDampを算出する処理を示すフローチャートである。γ_diff<0の場合、図9に示すマップのうち、γ_diff<0の領域の特性に従って減衰モーメント補正ゲインGainForMgDampが算出される。先ず、ステップS70では、γ_diff≧TH1_Mであるか否かを判定し、γ_diff≧TH1_Mの場合はステップS72へ進み、GainForMgDamp=MAX_GAINとする。一方、ステップS70でγ_diff<TH1_Mの場合はステップS74へ進み、γ_diff≧TH2_Mであるか否かを判定し、γ_diff≧TH2_Mの場合はステップS76へ進み、以下の式(12)から減衰モーメント補正ゲインGainForMgDampを算出する。
また、ステップS74でγ_diff<TH2_Mの場合はステップS78へ進み、γ_diff≧TH3_Mであるか否かを判定し、γ_diff≧TH3_Mの場合はステップS80へ進んでGainForMgDamp=MID_GAINとする。
また、ステップS78でγ_diff<TH3_Mの場合はステップS82へ進み、γ_diff≧TH4_Mであるか否かを判定し、γ_diff≧TH4_Mの場合はステップS84へ進んで以下の式(13)から減衰モーメント補正ゲインGainForMgDampを算出する。
また、ステップS62でγ_diff<TH4_Mの場合はステップS86へ進み、GainForMgDamp=MIN_GAINとする。
以上の処理により、減衰モーメント補正ゲインGainForMgDampが図9のマップに従って算出される。減衰制御モーメント演算部234aは、γ_diffの大小に応じて、高μ、低μなど操舵に対する車両挙動の安定度合いを判別するとともに、操舵に対する車両の旋回性能と収束性能を両立させるべく、高μ域(γ_diffがTH1_MからTH1_Pまでの範囲)では、旋回に伴う補正モーメントを100%出力するように減衰モーメント補正ゲインGainForMgDampを算出する。また、中μ域(γ_diffがTH2_PからTH3_Pまでの範囲、又は、TH2_MからTH3_Mまでの範囲)では、旋回に伴う補正モーメントを0とするように減衰モーメント補正ゲインGainForMgDampを算出する。また、低μ域(γ_diffがTH4_P以上の範囲、又は、TH4_M以下の範囲」)では、旋回に伴い逆モーメントを付与するように減衰モーメント補正ゲインGainForMgDampを算出する。また、高μ域、中μ域、低μ域の各モードへ遷移する領域では、出力を線形に変化させるように補正ゲインGainForMgDampを算出する。
なお、本実施形態では、操舵に対する車両1000の収束性能を向上させるため、減衰モーメント補正ゲインGainForMgDampに0や正負の値を設定しているが、車両制御が成立する範囲であれば、正の値のみの場合も含め、任意の定数を設定することができる。
また、慣性補償モーメント演算部(過渡項演算部)234bは、公知の平面2輪モデル(ヨー運動)をヨーモーメントについて整理した式において、ヨー加速度に掛かっている係数T1をΔγ_Tgtの微分値に乗じることで、車両旋回時におけるヨー慣性を補償する「目標慣性補償モーメントMgTransTgt」の基本量MgTransBasisを演算する。ここで、係数T1は、(5)式でdγ/dtに掛かっているI(車両のヨー慣性)に相当する。この際、慣性補償モーメント演算部(過渡項演算部)234bは、「目標慣性補償モーメントMgTransTgt」の基本量MgTransBasisに対して、ヨーレートの差分γ_diffに応じて路面状況を反映するように設定されたゲインを乗算することで、基本量MgTransBasisを補正し、「目標慣性補償モーメントMgTransTgt」を算出する。これにより、「目標慣性補償モーメントMgTransTgt」により、特に車両1000の瞬間的な挙動に対して、車両挙動を安定させることができる。
より詳細には、慣性補償モーメント演算部234bは、慣性補償モーメントを補正するゲインGainForMgTransを算出し、減衰制御モーメント演算部234aと同様に、γ_diffに応じてゲインGainForMgTransを可変させる機能を有する。また、慣性補償モーメント演算部234bは、γ_diffに基づいて、高μ域、低μ域など操舵に対する車両挙動の安定度合いを判別するとともに、低μ域では慣性補償モーメントの出力を制限する機能も併せ持つ補正ゲインGainForMgTransを算出する。そして、低μ域や限界領域に遷移しつつあると判断される場合は、ゲインを段階的に低減させる一方で、低μ域や限界領域に到達したと判断される場合には、ヨー慣性を補償するモーメントを0にするか、旋回性能を保持するため、ヨー慣性補償モーメントの出力を絞り、低μ時でも一時的に車両の挙動を調整するための機能を保持する制御を行う。
このため、慣性補償モーメント演算部234bは、先ず、Δγ_Tgtに係数T1を乗算して基本量MgTransBasisを算出する。そして、算出した基本量MgTransBasisと差分γ_diffに応じて変化する慣性補償モーメント補正ゲインGainForMgTransを乗算して目標慣性補償モーメントMgTransTgtを算出する。
図13は、慣性補償モーメント補正ゲインGainForMgTransを算出するマップを示す特性図である。また、図14は、慣性補償モーメント補正ゲインGainForMgTransを算出する処理を示すフローチャートである。図14の処理では、先ずステップS90において、差分γ_diff≧0であるか否かを判定し、差分γ_diff≧0の場合はステップS92へ進み、0以上の値であるγ_diffの値に基づいて慣性補償モーメント補正ゲインGainForMgTransを算出する。また、差分γ_diff<0の場合はステップS94へ進み、0より小さい値であるγ_diffの値に基づいて慣性補償モーメント補正ゲインGainForMgTransを算出する。
図15は、γ_diff≧0の場合に慣性補償モーメント補正ゲインGainForMgTransを算出する処理を示すフローチャートである。γ_diff≧0の場合、図13に示すマップのうち、γ_diff≧0の領域の特性に従って慣性補償モーメント補正ゲインGainForMgTransが算出される。先ず、ステップS100では、γ_diff≦TH1_Pであるか否かを判定し、γ_diff≦TH1_Pの場合はステップS102へ進み、GainForMgTrans=MAX_GAINとする。また、γ_diff>TH1_Pの場合はステップS104へ進み、γ_diff≧TH2_Pであるか否かを判定し、γ_diff≧TH2_Pの場合はステップS106へ進み、GainForMgTrans=MIN_GAINとする。
また、ステップS104でγ_diff<TH2_Pの場合はステップS108へ進み、以下の式(14)から慣性補償モーメント補正ゲインGainForMgTransを算出する。
また、図16は、γ_diff<0の場合に慣性補償モーメント補正ゲインGainForMgTransを算出する処理を示すフローチャートである。γ_diff<0の場合、図13に示すマップのうち、γ_diff<0の領域の特性に従って慣性補償モーメント補正ゲインGainForMgTransが算出される。先ず、ステップS110では、γ_diff≧TH1_Mであるか否かを判定し、γ_diff≧TH1_Mの場合はステップS112へ進み、GainForMgTrans=MAX_GAINとする。また、γ_diff<TH1_Mの場合はステップS114へ進み、γ_diff≦TH2_Mであるか否かを判定し、γ_diff≦TH2_Mの場合はステップS116へ進み、GainForMgTrans=MIN_GAINとする。
また、ステップS114でγ_diff≦TH2_Mの場合はステップS118へ進み、以下の式(15)から慣性補償モーメント補正ゲインGainForMgTransを算出する。
以上の処理により、慣性補償モーメント補正ゲインGainForMgTransが図13のマップに従って算出される。
図9及び図13に示すように、差分γ_diffがTH2_Pよりも大きくなると、減衰モーメント補正ゲインGainForMgDampが0となり、定常項では旋回支援が行われなくなる。更に、差分γ_diffがTH3_Pよりも大きくなると、減衰モーメント補正ゲインGainForMgDampが負の値となり、その時の慣性補償モーメント補正ゲインGainForMgTransの設定にもよるが、目標減衰モーメントMgDampTgtと目標慣性補償モーメントMgTransTgtを加算した値が負の値となる。従って、旋回を抑制する方向に第1制御目標モーメントMg1を発生させることができる。
なお、本実施形態では、操舵に対する車両1000の応答性能を重視するため、正の値のみでゲインを指示しているが、車両制御が成立する範囲であれば、0や負の値を含め、任意の定数を設定することができる。
以上のようにして目標減衰モーメントMgDampTgt及び目標慣性補償モーメントMgTransTgtが算出されると、第1制御目標ヨーレート演算部234の加算部234cは、目標減衰モーメントMgDampTgtと目標慣性補償モーメントMgTransTgtとを加算して、操安制御で用いる第1制御目標モーメントMg1を算出する。第1制御目標モーメントMg1は、制御目標モーメント演算部250へ入力される。
一方、第2制御目標モーメント演算部270は、アッカーマン領域を想定して、車両の幾何学的関係を模擬したモデルに舵角θhと車両速度Vを入力することで、第2制御目標モーメントMg2を算出する。低車速域においては、車両旋回に伴う遠心力が働かないか、または微小な量しか遠心力が発生しないため、コーナーリングフォースの影響を無視することができる。第2制御目標モーメント演算部270は、低速域における駆動力制御を補償するため、幾何的な関係に基づいて、いわゆるアッカーマンステアリングジオメトリにより車両運動を計算する。第2制御目標モーメント演算部270は、以下の式(16)に基づいて、舵角θhと車両速度Vから第2制御目標モーメントMg2を算出する。なお、式(16)における関数f(V,θH)は、旋回中の車両の幾何学的な関係から導かれる計算式を適用しても良いし、実験結果を反映したマップを適用しても良い。
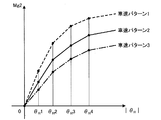
図17は、第2制御目標モーメント演算部270が第2制御目標モーメントMg2を演算する際に用いるマップを示す模式図である。図17に示すように、第2制御目標モーメントMg2は、操舵角θhが大きいほど大きな値に設定される。また、第2制御目標モーメントMg2は、操舵角θhが同じであっても、車両速度Vに応じた車速パターンに応じて異なる値に設定される。例えば、第2制御目標モーメントMg2は、車両速度Vが高くなるほど大きな値に設定される。なお、図17に示すマップは一例であり、操舵角θhと車両速度Vに基づいて第2制御目標モーメントMg2を算出するものであれば、シミュレーションに基づくマップ、実験値に基づくマップ等、どのようなマップであっても良い。このように、低車速域を想定したアッカーマン制御のモデルでは、操舵角θhと車両速度Vによるマップから、フィードフォワード制御で用いる第2制御目標モーメントMg2を演算する。
図17に示すマップでは、操舵角θhを横軸、第2制御目標モーメントMg2を縦軸とし、車両速度Vにより車速パターンを切り換えることを想定している。第2制御目標モーメントMg2を算出するマップについては、操舵角θhと横滑り角の幾何学的な関係からマップ定数を指定してもよいし、実車評価を通じて適合したマップ定数を指定しても良い。
制御目標モーメント演算部250は、車速可変ゲイン演算部252、及び調停部254を有している。制御目標モーメント演算部250には、操安制御部220から第1制御目標モーメントMg1が入力される。また、制御目標モーメント演算部250には、第2制御目標ヨーレート演算部270から第2制御目標モーメントMg2が入力される。
上述したように、低車速域においては、車両旋回に伴う遠心力が働かないか、または微小な量しか遠心力が発生しないため、コーナーリングフォースの影響を無視することができ、幾何的な関係に基づいて、いわゆるアッカーマンステアリングジオメトリにより車両運動を計算できる。
一方、車両速度が上がるにつれて旋回に伴う遠心力が増大する。この状況において、低車速域での制御を操安制御に適用すると、実機の車両1000の挙動と制御目標との誤差が拡大し、車両挙動に対してドライバーの違和感を招く可能性がある。つまり、アッカーマン領域の制御では、車両1000が低速で走行し、かつ旋回中に遠心力が働かないことを前提としているため、中高速域における車両の旋回状況(車両に遠心力が働く状況)を模擬することはできない。
このため、本実施形態では、車両速度Vに応じて、低車速域でのアッカーマン領域における制御と中高速域での操安制御を滑らかに切り換えることで、実機の車両1000の挙動と制御目標との誤差を抑えるようにしている。
制御目標モーメント演算部250は、中高速域での操安制御と低速域での旋回制御を両立させるため、車両速度Vに基づいて第1制御目標モーメントMg1と第2制御目標モーメントMg2を按分して制御目標モーメントMgTgtを算出する。このため、車速可変ゲイン演算部252は、車両速度Vに応じて車速可変ゲインGainVxを算出する。図18は、車両速度Vに応じて車速可変ゲインGainVxを算出するマップを示す特性図である。また、図19は、車速可変ゲインGainVxを算出する処理を示すフローチャートである。図18に示すように、車速可変ゲインGainVxは、車速がVx_1以下では0とされる。また、車速可変ゲインGainVxは、車速VがVx_1よりも大きい場合は、車両速度Vの増加に伴って増加し、車両速度VがVx_2以上では1となる。本実施形態では、車速可変ゲインGainVxの最大値と最小値の間は線形補間で車速可変ゲインGainVxを計算している。車速可変ゲインGainVxの範囲は、車両制御として成立する範囲であれば任意の値を取れる様に構成を変更しても良い。
図19の処理では、先ず、ステップS120では、V≦Vx_1であるか否かを判定し、V≦Vx_1の場合はステップS122へ進み、GainVx=0とする。一方、V>Vx_1の場合はステップS124へ進み、V≧Vx_2であるか否かを判定し、V≧Vx_2の場合はステップS126へ進み、GainVx=1とする。
また、ステップS124でV<Vx_2の場合はステップS128へ進み、以下の式(17)から車速可変ゲインGainVxを算出する。
以上の処理により、車速可変ゲインGainVxが図18のマップに従って算出される。
調停部254は、以下の式(18)に基づいて、車速可変ゲインGainVxに基づいて第1制御目標モーメントMg1と第2制御目標モーメントMg2を按分し、制御目標モーメントMgTgtを算出する。
MgTgt=GainVx×Mg1+(1−GainVx)×Mg2 ・・・(18)
以上のようにして制御目標モーメント演算部250が算出した制御目標モーメントMgTgtは、モータ要求トルク演算部280へ入力される。モータ要求トルク演算部280は、制御目標モーメントMgTgtに基づいてモータ要求トルクを算出する。
次に、図20〜図23に基づいて、本実施形態の制御を行った場合の車両挙動について説明する。図20、図21は、シミュレーションによって得られた本実施形態に係る目標スタビリティファクタSfTgの補正処理による効果を説明するための特性図であって、車両速度Vを一定とし、操舵角θhをランプ状に操作した操舵入力を車両1000に付与している際に、時刻t1で路面μが高μから低μへ急変した場合の車両挙動を示している。より詳細には、図20及び図21では、操舵角θh、実ヨーレートγ、差分γ_diff、路面摩擦係数μ、目標スタビリティファクタSftgt、ロール角φ、ロールレートφ_dotの変化を示している。ここで、図20は、比較のため目標スタビリティファクタSfTgの補正処理を行わない場合のヨーレートフィードバック制御を示しており、図21は、本実施形態の制御により目標スタビリティファクタSfTgの補正処理を行った場合を示している。
図20に示すように、目標スタビリティファクタSfTgの補正処理を行わない場合は、路面摩擦係数μが変化した瞬間にγ_diffが増大している。そして、γ_diffの増大に伴い旋回割合(実ヨーレートγ)とロール角φが増大している。従って、路面が滑りやすい状況にも関わらず、車体の傾き(ロール角φ)が増大し、挙動が不安定になっていることが判る。
一方、図21に示すように、本実施形態の制御により目標スタビリティファクタSfTgの補正処理を行った場合は、実ヨーレートγ、および差分γ_diffの定常ゲインの変化量が、図20よりも減少しており、かつ、ロールレートφ_dotがロールを戻す側にも発生していることから、ロール角φの定常ゲインの変化量も減少している。従って、目標スタビリティファクタSfTgtを変化させることにより、車両挙動が安定することが判る。
また、図22、図23は、シミュレーションによって得られた本実施形態に係る制御目標モーメント(減衰モーメント補正ゲインGainForMgDampと慣性補償モーメント補正ゲインGainForMgTransを併用)を補正した際の効果を説明するための特性図であって、ウェット路や雪道等の路面摩擦係数が低い路面において、時刻t2でレーンチェンジを行った場合の車両挙動を示している。なお、入力している操舵量は旋回支援に伴う駆動力制御を働かせていない状態で、「ドライ路面」(高μ)であり、かつ定常操舵で0.5[G]の横加速度が発生するものとする。より詳細には、図22及び図23では、実ヨーレートγ、差分γ_diff、減衰モーメント補正ゲインGainForMgDamp、慣性補償モーメント補正ゲインGainForMgTrans、ロール角φ、ロールレートφ_dotの変化を示している。ここで、図22は、比較のため本実施形態に係る制御目標モーメント補正を行わない場合を示しており、図23は、本実施形態に係る制御目標モーメント補正を行った場合を示している。
図22に示すように、本実施形態に係る制御目標モーメント補正を行わない場合は、レーンチェンジ終了後に実ヨーレートγおよび差分γ_diffが振動している。また、ヨー運動の変化(実ヨーレートγの振動)に連動してロールレートφ_dotも振動しており、ドライバーに対して違和感を与えてしまう。
一方、図23に示すように、本実施形態の制御により制御目標モーメント補正を行った場合は、減衰モーメント補正ゲインGainForMgDampが負側に設定され、かつ慣性補償モーメント補正ゲインGainForMgTransのゲインを低減する制御が行われるため、レーンチェンジ終了後の差分γ_diffや実ヨーレートγの振幅が、図22の制御よりも明らかに低減している。このため、ヨー運動の変化(実ヨーレートγの振幅低減)に連動してロールレートφ_dotの振動が減少し、変化が緩やかになることから、ドライバーに違和感を与えてしまうことを抑止できる。
以上説明したように第1の実施形態によれば、ヨーレートモデル値γ_clcとセンサ値γ_filとの差分γ_diffに応じてヨーレートモデル値γ_clcの信頼度を判定し、差分γ_diffの絶対値が大きいほど目標スタビリティファクタSfTgtの値が増加するように目標スタビリティファクタSfTgtの補正処理を行うようにした。これにより、路面摩擦係数μが低下している状況下では、目標スタビリティファクタSfTgtの値が増加し、目標ヨーレートγ_Tgtを低下させることができ、車両1000の挙動を安定させることが可能となる。
また、差分γ_diffの絶対値の増加に応じて、減衰モーメント補正ゲインGainForMgDamp及び慣性補償モーメント補正ゲインGainForMgTransを減少させるようにしたため、路面摩擦係数μが低下している状況下では、第1制御目標モーメントMg1の値を低下させることができる。従って、車両1000の旋回の支援を最適に制御することができ、車両1000の挙動を安定させることが可能となる。
<2.第2の実施形態>
次に、本発明の第2の実施形態について説明する。第2の実施形態では、目標スタビリティファクタSfTg、減衰モーメント補正ゲインGainForMgDamp、慣性補償モーメント補正ゲインGainForMgTransを可変させる指標として、前輪100,102及び後輪104,106のそれぞれのモータ108,110,112,114の目標回転数と、各モータ108,110,112,114に対応する前輪100,102及び後輪104,106のそれぞれの実回転数との偏差のうち、絶対値が最大になる車輪の偏差ΔMotRevを用いる。路面状況が低μである程、前輪100,102及び後輪104,106が空転して偏差ΔMotRevが大きくなるため、偏差ΔMotRevはγ_diffと同様に路面状況を反映するものとなる。従って、偏差ΔMotRevを目標スタビリティファクタSfTg、減衰モーメント補正ゲインGainForMgDamp、慣性補償モーメント補正ゲインGainForMgTransを可変させる指標として用いることができる。
図24は、第2の実施形態に係る制御装置202の構成を示す模式図である。第2の実施形態に係る制御装置202の基本的な構成は、第1の実施形態に係る制御装置200の構成と同様であるが、偏差ΔMotRevを検出する回転数差検出部290を有しており、補正処理部222は、偏差ΔMotRevに基づいて目標スタビリティファクタSfTgtを算出する。偏差ΔMotRevに基づく目標スタビリティファクタSfTgtの算出は、第1の実施形態における差分γ_diffに基づく目標スタビリティファクタSfTgtの算出と同様にして行われ、図7の横軸を偏差ΔMotRevとしたマップから目標スタビリティファクタSfTgtを算出する。ここで、偏差ΔMotRevは路面状況を表すパラメータに相当するため、回転数差検出部290は路面状況を表すパラメータを取得する構成要素に相当する。
また、減衰制御モーメント演算部(定常項算出部)234a、及び慣性補償モーメント演算部(過渡項演算部)234bは、偏差ΔMotRevに基づいて目標減衰モーメントMgDampTgt及び目標慣性補償モーメントMgTransTgtをそれぞれ算出する。偏差ΔMotRevに基づく目標減衰モーメントMgDampTgt、及び目標慣性補償モーメントMgTransTgtの算出は、第1の実施形態における差分γ_diffに基づく目標減衰モーメントMgDampTgt、及び目標慣性補償モーメントMgTransTgtの算出と同様にして行われ、図9、図13の横軸を偏差ΔMotRevとしたマップから目標減衰モーメントMgDampTgt、目標慣性補償モーメントMgTransTgtを算出する。
なお、ΔMotRevの算出においては、各輪の各モータの目標回転数と各輪の実回転数の偏差の絶対値から、平均値を取ってΔMotRevとして指定しても良いし、旋回外側の車輪におけるモータの目標回転数と実回転数の偏差から、絶対値が最大のものを選択したり、絶対値の平均値を指標として使用する等、車両制御が成立する任意の組み合わせで偏差ΔMotRevを指定してもよい。また、車輪速と車速から求められる各輪のスリップ率のうち、最大になるパラメータを指標として、制御を行っても良い
以上説明したように第2の実施形態によれば、偏差ΔMotRevの絶対値が大きいほど目標スタビリティファクタSfTgtの値が増加するように目標スタビリティファクタSfTgtの補正処理を行うようにした。これにより、路面摩擦係数μが低下している状況下では、目標スタビリティファクタSfTgtの値が増加し、目標ヨーレートγ_Tgtを低下させることができ、車両1000の挙動を安定させることが可能となる。
また、偏差ΔMotRevの絶対値の増加に応じて、減衰モーメント補正ゲインGainForMgDamp及び慣性補償モーメント補正ゲインGainForMgTransを減少させるようにしたため、路面摩擦係数μが低下している状況下では、第1制御目標モーメントMg1の値を低下させることができる。従って、車両1000の旋回の支援を最適に制御することができ、車両1000の挙動を安定させることが可能となる。
<3.第3の実施形態>
次に、本発明の第3の実施形態について説明する。第3の実施形態では、目標スタビリティファクタSfTg、減衰モーメント補正ゲインGainForMgDamp、慣性補償モーメント補正ゲインGainForMgTransを可変させる指標として、外界認識手部170から取得される環境情報μ_prevを用いる。
外界認識部170は、CCDセンサ、CMOSセンサ等の撮像素子を有する左右1対のカメラを有して構成され、車両外の外部環境を撮像し、外部環境を画像情報として認識することができる。本実施形態に係る外界認識部170は、一例として色情報を取得可能なカラーカメラから構成される。外部認識部170は、撮像した左右1組のステレオ画像対に基づいて、路面摩擦係数μを推定することができる。
具体的には、外部認識部170は、取得した環境情報に基づいて、路面がウエットであるか、雪道であるかなどを判定し、判定した路面状態に応じて路面摩擦係数μを推定し、推定した路面摩擦係数μの推定値μ_prevを出力する。ここで、推定値μ_prevの値が大きい程、路面摩擦係数μの値は低下するものとする。推定値μ_prevは路面状況を表すパラメータに相当するため、外部認識部170は路面状況を表すパラメータを取得する構成要素に相当する。
また、路面摩擦係数μの推定方法として、以下の方法を用いることもできる。例えば、車両の運動理論に基づいて車両の挙動をモデル化した車両運動モデルを用いた手法が周知である。この手法では、実際の車両の運動状態(例えば、すべり角)に基づいて、例えば、高μ路を想定した車両運動モデルの運動状態と、低μ路を想定した車両運動モデルの運動状態とを比較することにより、現在の摩擦係数μを推定する。このような摩擦係数μの推定手法の詳細については、例えば、特開2000−071968号公報に開示されているので、必要ならば参照されたい。また、これ以外にも、例えば、特開2003−237558号公報に開示されているように、2つの車輪6の速度差と、加速度とに基づいて摩擦係数μを推定してもよい。さらに、例えば、特開2002−127882号公報に開示されているように、車両の運動状態に、外界認識手段170から得られた道路の路面状況を検出した検出結果を考慮した上で摩擦係数μを推定してもよい。このように、本実施形態では、車両の状態に基づいて摩擦係数を推定する手法を広く用いることができる。
路面状況が低μである程、路面摩擦係数μの推定値μ_prevは大きな値となり、推定値μ_prevはγ_diffと同様に路面状況を反映するものとなる。従って、推定値(μ_prev)を目標スタビリティファクタSfTg、減衰モーメント補正ゲインGainForMgDamp、慣性補償モーメント補正ゲインGainForMgTransを可変させる指標として用いることができる。
図25は、第3の実施形態に係る制御装置204の構成を示す模式図である。第3の実施形態に係る制御装置204の基本的な構成は、第1の実施形態に係る制御装置200の構成と同様であるが、補正処理部222は、推定値μ_prevに基づいて目標スタビリティファクタSfTgtを算出する。
図26は、目標スタビリティファクタSfTgtを算出するマップを示す特性図である。また、図27は、目標スタビリティファクタSfTgtを算出する処理を示すフローチャートである。図27の処理では、先ずステップS130において、μ_prev≦TH1であるか否かを判定し、μ_prev≦TH1の場合はステップS132へ進み、SfTgt=Sf1とする。一方、ステップS130でμ_prev>TH1の場合はステップS134へ進み、μ_prev≧TH2であるか否かを判定し、μ_prev≧TH2の場合はステップS136へ進んでSfTgt=Sf2とする。
また、ステップS134でμ_prev<TH2の場合はステップS138へ進み、以下の式(21)からSfTgtを算出する。
以上のように、図27の処理によれば、図26のマップに従って目標スタビリティファクタSfTgtを算出することができる。
また、減衰制御モーメント演算部(定常項算出部)234a、及び慣性補償モーメント演算部(過渡項演算部)234bは、推定値(μ_prev)に基づいて目標減衰モーメントMgDampTgt、及び目標慣性補償モーメントMgTransTgtをそれぞれ算出する。
図28は、減衰モーメント補正ゲインGainForMgDampを算出するマップを示す特性図である。また、図29は、減衰モーメント補正ゲインGainForMgDampを算出する処理を示すフローチャートである。図29の処理では、先ず、ステップS140では、μ_prev≧TH1_Pであるか否かを判定し、μ_prev≧TH1_Pの場合はステップS142へ進み、GainForMgDamp=MAX_GAINとする。一方、ステップS140でμ_prev<TH1_Pの場合はステップS144へ進み、μ_prev≦TH2_Pであるか否かを判定し、μ_prev≦TH2_Pの場合はステップS146へ進み、以下の式(22)から減衰モーメント補正ゲインGainForMgDampを算出する。
また、ステップS144でμ_prev>TH2_Pの場合はステップS148へ進み、μ_prev≦TH3_Pであるか否かを判定し、μ_prev≦TH3_Pの場合はステップS150へ進んでGainForMgDamp=MID_GAINとする。
また、ステップS148でμ_prev>TH3_Pの場合はステップS152へ進み、μ_prev≦TH4_Pであるか否かを判定し、μ_prev≦TH4_Pの場合はステップS154へ進んで以下の式(23)から減衰モーメント補正ゲインGainForMgDampを算出する。
また、ステップS152でμ_prev>TH4_Pの場合はステップS156へ進み、GainForMgDamp=MIN_GAINとする。
以上のように、図29の処理によれば、図28のマップに従って減衰モーメント補正ゲインGainForMgDampを算出することができる。
図30は、慣性補償モーメント補正ゲインGainForMgTransを算出するマップを示す特性図である。また、図31は、慣性補償モーメント補正ゲインGainForMgTransを算出する処理を示すフローチャートである。図31の処理では、先ずステップS160において、μ_prev≦TH1_Pであるか否かを判定し、μ_prev≦TH1_Pの場合はステップS162へ進み、GainForMgTrans=MAX_GAINとする。また、μ_prev>TH1_Pの場合はステップS164へ進み、μ_prev≧TH2_Pであるか否かを判定し、μ_prev≧TH2_Pの場合はステップS166へ進み、GainForMgTrans=MIN_GAINとする。
また、ステップS164でμ_prev<TH2_Pの場合はステップS168へ進み、以下の式(24)から慣性補償モーメント補正ゲインGainForMgTransを算出する。
以上のように、図31の処理によれば図30のマップに従って慣性補償モーメント補正ゲインGainForMgTransを算出することができる。
以上説明したように第3の実施形態によれば、路面摩擦係数μの推定値μ_prevの値が大きいほど(低μの場合ほど)目標スタビリティファクタSfTgtの値が増加、すなわち操舵入力に対してアンダーステアになるように目標スタビリティファクタSfTgtの補正処理を行うようにした。これにより、路面摩擦係数μが低下している状況下では、目標スタビリティファクタSfTgtの値が増加し、目標ヨーレートγ_Tgtを低下させることができ、車両1000の挙動を安定させることが可能となる。
また、推定値μ_prevの増加に応じて、減衰モーメント補正ゲインGainForMgDamp及び慣性補償モーメント補正ゲインGainForMgTransを減少させるようにしたため、路面摩擦係数μが低下している状況下では、第1制御目標モーメントMg1の値を低下させることができる。従って、車両1000の旋回の支援を最適に制御することができ、車両1000の挙動を安定させることが可能となる。
以上、添付図面を参照しながら本発明の好適な実施形態について詳細に説明したが、本発明はかかる例に限定されない。本発明の属する技術の分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本発明の技術的範囲に属するものと了解される。