以下、本発明の実施の形態を図面に基づいて説明する。本実施形態は、FR(フロントエンジン・リヤドライブ)方式の車両に本発明を適用した場合について説明する。
(パワートレインおよび制御系の構成)
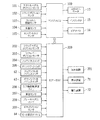
図1は、本実施形態に係る車両のパワートレインおよび制御系の概略構成を示す図である。この図1に示すように、車両のパワートレインとして、エンジン1の出力軸であるクランクシャフト11にはクラッチ機構2を介して変速機構3が連結されている。また、この変速機構3の出力側は、プロペラシャフト41、デファレンシャルギヤ42およびドライブシャフト43,43を介して駆動輪44,44に連結されている。
前記エンジン1は、例えばガソリンエンジンやディーゼルエンジン等の内燃機関である。エンジン1は、エンジンECU100によって制御される。具体的には、アクセルペダルポジションセンサ101によって検出されるアクセルペダル51の操作量の情報や、クランクポジションセンサ102(図3を参照)からの出力信号に基づいて算出されるエンジン回転速度の情報などがエンジンECU100に入力され、これらを基に、運転者が要求するエンジン出力が求められる。そして、それに応じて、スロットルバルブ12の開度を調整するスロットルモータ13に対し開度制御信号を送信したり、図示しないインジェクタ(燃料噴射弁)からの燃料噴射量、吸排気の各バルブの開閉タイミング、点火プラグの点火時期等の制御を行ったりする。
前記クラッチ機構2は、摩擦クラッチ21(図2を参照)およびクラッチアクチュエータ22を備えた所謂自動クラッチとして構成されている。クラッチアクチュエータ22は、油圧回路201から供給される油圧に応じて作動し、摩擦クラッチ21の係合状態を変化させる。
具体的には、図2に示すように、摩擦クラッチ21は、クラッチディスク23、プレッシャープレート24、ダイアフラムスプリング25を備えている。また、クラッチアクチュエータ22はレリーズベアリング26を備えている。
クラッチディスク23は、変速機構3の入力軸31の先端部にスプライン嵌合されており、この入力軸31に対して一体回転可能であり、且つ軸心方向への移動が可能である。また、このクラッチディスク23は、クランクシャフト11の後端に固定されたフライホイール14に対向して配置されている。プレッシャープレート24は、ダイアフラムスプリング25の外周部とクラッチディスク23との間に配置されている。ダイアフラムスプリング25は、自然状態(外力を受けていない状態)においてプレッシャープレート24をクラッチディスク23に向けて押圧し、これにより、クラッチディスク23をフライホイール14に圧接している。ダイアフラムスプリング25の内周部分にはレリーズベアリング26が対向配置されている。このレリーズベアリング26には前記油圧回路201が接続されており、電子制御式トランスミッションECU(以下、ECT−ECUという;本発明でいう「コントローラ」)200内部のクラッチ制御部200A(図1を参照)からのクラッチ制御信号によって油圧回路201からレリーズベアリング26に供給される油圧が制御される。ダイアフラムスプリング25からの押圧力によってクラッチディスク23がフライホイール14に圧接している状態(クラッチ機構2の係合状態)において、油圧回路201からの油圧の供給によりレリーズベアリング26がダイアフラムスプリング25の内周部分を押圧すると、ダイアフラムスプリング25が反転され、クラッチディスク23に対するプレッシャープレート24の押圧力が解除される。これにより、クラッチディスク23がフライホイール14から引き離され、クラッチ機構2が解放される。
このように、クラッチ機構2は、運転者によるクラッチペダル52の踏み込み操作の有無に関わりなく、油圧回路201から供給される油圧によるクラッチアクチュエータ22の作動によって、係合状態と解放状態との間で動力伝達状態が変更可能な所謂クラッチバイワイヤシステムとして構成されている。
前記変速機構3は、公知のマニュアルトランスミッションと基本的に同様のシンクロメッシュ機構付きの常時噛み合い式の平行歯車機構であり、例えば前進6速段、後進1速段の成立が可能となっている。この変速機構3は、所謂オートメイティッド・マニュアル・トランスミッション(AMT)と呼ばれるものであり、ECT−ECU200内部の変速制御部200Bからの変速制御信号によって作動されるようになっている。
具体的に、変速機構3は、後進ギヤ段および複数の前進ギヤ段を成立させる複数のギヤ(図示省略)と、セレクトアクチュエータ32およびシフトアクチュエータ33を備えている。これらアクチュエータ32,33は、ECT−ECU200の変速制御部200Bからの変速制御信号に従って油圧回路201から供給される油圧により制御される。つまり、これらアクチュエータ32,33を駆動させることで各ギヤ段(各変速段)におけるギヤの噛み合い状態(動力伝達経路)を切り換える機構となっている。
具体的には、セレクトアクチュエータ32の作動によって、操作力(油圧により発生する操作力)の伝達が行われるフォークシャフト(図示省略)が選択される。これにより、シフトアクチュエータ33により操作されるシンクロメッシュ機構が選択されることになる。そして、シフトアクチュエータ33の作動によって、フォークシャフトが移動し、それに伴って前記選択されたシンクロメッシュ機構のスリーブが移動し、シンクロナイザリングを軸心方向にスライド移動させて、ギヤ同士の動力伝達経路を切り換える。これにより、所定のギヤ段が成立することになる。なお、このシンクロナイザリングのスライド移動に伴ってギヤ段を成立させる構成については周知であるため、ここでの説明は省略する。
このように、変速機構3は、マニュアルトランスミッションの構成に、アクチュエータ32,33をアドオンし、これらアクチュエータ32,33によって変速動作を実行する所謂シフトバイワイヤシステムとして構成されている。
上述した変速機構3の変速動作により、クラッチ機構2を介して変速機構3に入力されたエンジン1の回転は、変速機構3において所定の変速比で変速された後に、プロペラシャフト41に伝達される。そして、プロペラシャフト41の回転が、デファレンシャルギヤ42およびドライブシャフト43,43を介して左右の駆動輪44,44に伝達されて車両が走行する。
一方、車室内のセンタコンソール部分には、運転者による操作が可能なシフトレバー65(図1では仮想線で示している)を備えたシフトレバー操作部6が設けられている。図1には、このシフトレバー65の操作をガイドするシフトゲートの形状を示している。このシフトゲートのシフトパターンとしては、後進走行ポジション(Rポジション)、ニュートラルポジション(Nポジション)、自動変速ポジション(Eポジション)、および、手動変速ポジション(Mポジション)を備えている。また、Mポジションにあっては、アップシフト(+)およびダウンシフト(−)を運転者が選択できる構成となっている。この際、運転者の手前方向となるアップシフト位置「+」への操作は変速機構3のアップシフト操作(ECT−ECU200にアップシフト要求信号を出力するための操作)となり、反対方向となるダウンシフト位置「−」への操作は変速機構3のダウンシフト操作(ECT−ECU200にダウンシフト要求信号を出力するための操作)となる。そして、シフトレバー65をアップシフト位置「+」またはダウンシフト位置「−」に操作した後に、運転者がシフトレバー65から手を離すことで、中立のMポジションに復帰する構成となっている。
なお、シフトゲートのシフトパターンとしては上述したものに限らず任意に設定可能である。例えば、「自動変速モード」を有しない変速機構にあっては、前記自動変速ポジション(Eポジション)を備えないシフトパターンとなる。また、シフトゲート上に駐車ポジション(Pポジション)を備えたシフトパターンであってもよい。
また、運転席前方に設置されているステアリングホイール61には、アップシフト用パドルスイッチ62およびダウンシフト用パドルスイッチ63が設けられている。
これらのパドルスイッチ62,63はレバー形状とされており、アップシフト用パドルスイッチ62には「+」の記号が、ダウンシフト用パドルスイッチ63には「−」の記号がそれぞれ付されている。アップシフト用パドルスイッチ62は、アップシフト要求信号を出力するためのものであり、ダウンシフト用パドルスイッチ63は、ダウンシフト要求信号を出力するためのものである。
そして、シフトレバー65が前記Mポジションに操作されている場合において、アップシフト用パドルスイッチ62が操作(手前に引く操作)されると、1回操作ごとに変速段を1段だけアップするアップシフト要求信号が出力される。また、ダウンシフト用パドルスイッチ63が操作(手前に引く操作)されると、1回操作ごとに変速段を1段だけダウンするダウンシフト要求信号が出力される。
以上のようなシフトレバー65の操作情報およびパドルスイッチ62,63の操作情報はECT−ECU200に与えられる。これらシフトレバー65およびパドルスイッチ62,63が本発明でいう「変速操作部」となっている。そして、ECT−ECU200は、シフトレバー65の操作情報およびパドルスイッチ62,63の操作情報に基づいた各アクチュエータ22,32,33の制御を行う。
つまり、シフトレバー65が自動変速ポジション(Eポジション)にある際には、アクセル開度や車速等の走行条件に応じてクラッチ機構2のクラッチアクチュエータ22および変速機構3の各アクチュエータ32,33が作動して、自動シフトチェンジ動作が行われる(自動変速モード)。
一方、シフトレバー65が手動変速ポジション(Mポジション)にある際には、運転者の操作(例えばクラッチペダル52の踏み込み操作や、シフトレバー65のアップシフト位置またはダウンシフト位置への操作や、パドルスイッチ62,63の操作など)に応じてシフトチェンジ動作が行われる(手動変速モード)。
シフトレバー65が手動変速ポジション(Mポジション)に操作されている場合の操作モードとしては、後述する「2ペダルモード」と「3ペダルモード」とがある。「2ペダルモード」は、シフトレバー65のアップシフト位置またはダウンシフト位置への操作や、パドルスイッチ62,63の操作に従ってクラッチ機構2が自動的に作動するモードである。「3ペダルモード」は、クラッチペダル52の踏み込み操作に従ってクラッチ機構2が作動するモードである。これらモードにおける変速動作については後述する。
また、運転席前方のメータパネルには表示装置71(図3を参照)が設けられており、前記手動変速モードでは、現在の操作モードの表示(2ペダルモードまたは3ペダルモードの表示)や、シフトレバー65やパドルスイッチ62,63の操作で要求されたギヤ段の表示等が行われるようになっている。
以下、図3を用いて、エンジンECU100およびECT−ECU200に関連する制御系の構成を説明する。
エンジンECU100およびECT−ECU200は、CPU(中央処理装置)、ROM(プログラムメモリ)、RAM(データメモリ)、ならびにバックアップRAM(不揮発性メモリ)などを備えた公知の構成となっている。ROMは、各種制御プログラムや、それら各種制御プログラムを実行する際に参照されるマップなどが記憶されている。CPUは、ROMに記憶された各種制御プログラムやマップに基づいて演算処理を実行する。また、RAMは、CPUでの演算結果や各センサから入力されたデータ等を一時的に記憶するメモリである。バックアップRAMは、エンジン1の停止時にその保存すべきデータなどを記憶する不揮発性のメモリである。
エンジンECU100の入力インターフェース(図示省略)には、アクセルペダルポジションセンサ101、クランクポジションセンサ102、スロットル開度センサ103、水温センサ104、エンジントルクセンサ105などが接続されている。アクセルペダルポジションセンサ101は、アクセルペダル51の踏み込み量に応じた検出信号を出力する。クランクポジションセンサ102は、クランクシャフト11が所定回転角度だけ回転する度にパルス信号を出力する。スロットル開度センサ103は、スロットルバルブ12の開度に応じた検出信号を出力する。水温センサ104は、エンジン1の冷却水温度に応じた検出信号を出力する。エンジントルクセンサ105は、エンジン1の出力(トルク)に応じた信号を出力する。
エンジンECU100の出力インターフェース(図示省略)には、スロットルモータ13、インジェクタ15、ならびに点火プラグのイグナイタ16などが接続されている。
ECT−ECU200の入力インターフェース(図示省略)には、クラッチペダルポジションセンサ202、シフトレバーポジションセンサ203、アップシフトスイッチ204、ダウンシフトスイッチ205、アップシフト用パドルスイッチ62、ダウンシフト用パドルスイッチ63、入力軸回転速度センサ206、車速センサ207、ブレーキペダルセンサ208、ギヤポジションセンサ209、モード選択ダイヤル64などが接続されている。クラッチペダルポジションセンサ202は、クラッチペダル52の踏み込み量に応じた検出信号を出力する。シフトレバーポジションセンサ203は、シフトレバー65の操作位置(R,N,E,Mの各位置)に応じた検出信号を出力する。アップシフトスイッチ204は、シフトレバー65がMポジションからアップシフト位置「+」に操作される度にアップシフト要求信号を出力する。ダウンシフトスイッチ205は、シフトレバー65がMポジションからダウンシフト位置「−」に操作される度にダウンシフト要求信号を出力する。アップシフト用パドルスイッチ62は、操作される度にアップシフト要求信号を出力する。ダウンシフト用パドルスイッチ63は、操作される度にダウンシフト要求信号を出力する。入力軸回転速度センサ206は、変速機構3の入力軸31の回転速度に応じた検出信号を出力する。車速センサ207は、駆動輪44の回転速度に応じた速度信号(例えば変速機構3の出力軸の回転速度信号)を出力する。ブレーキペダルセンサ208は、ブレーキペダル53の操作状態(ブレーキのON/OFF)に応じた検出信号を出力する。ギヤポジションセンサ209は、変速機構3において成立しているギヤポジションの検出信号を出力する。モード選択ダイヤル64は、車室内のセンタコンソール部分に配設され、手動変速モードにおいて「2ペダルモード」と「3ペダルモード」とを手動操作によって選択するためのものである。
ECT−ECU200の出力インターフェース(図示省略)には、前記油圧回路201、表示装置71、警告装置72などが接続されている。表示装置71は、前述したように、手動変速モードの選択時における現在の操作モードの表示(2ペダルモードまたは3ペダルモードの表示)や、シフトレバー65やパドルスイッチ62,63の操作で要求されたギヤ段の表示を行う。警告装置72は、システムに異常が発生した場合、ウォーニングランプを点灯または点滅させることにより運転者に警告を発する。
前記エンジンECU100とECT−ECU200とは、互いに必要な情報を双方向で送受信する通信を行うように双方向バスで接続されている。
エンジンECU100は、入力される各種情報に基づきエンジン1の運転状態を検出し、スロットルバルブ12の開度を調整するスロットルモータ13の制御を行うとともに、インジェクタ15からの燃料噴射量、吸排気の各バルブの開閉タイミング、点火プラグの点火時期の制御(イグナイタ16の制御)を行うことにより、エンジン1の運転を統括的に制御する。
ECT−ECU200は、入力される各種情報に基づき、クラッチ機構2を作動させる処理、変速機構3のギヤ段を要求ギヤ段に変更する処理などを実行する。これらの処理は、油圧回路201から、クラッチアクチュエータ22、セレクトアクチュエータ32およびシフトアクチュエータ33に対しての作動油圧の供給および回収を制御することによって行う。
(変速モード)
次に、各変速モードについて説明する。前述したように、本実施形態に係る車両の変速モードとしては、自動変速モードと手動変速モードとが選択可能である。また、手動変速モードとしては、クラッチ機構2の作動条件が互いに異なる操作モードとして2ペダルモード(本発明でいう第2の操作モード)と3ペダルモード(本発明でいう第1の操作モード)とが選択可能である。以下、具体的に説明する。
−自動変速モード−
シフトレバー65が「Eポジション」に操作されると「自動変速モード」が選択される。この自動変速モードが選択された場合、ECT−ECU200は、車両走行状態に応じた最適なギヤ段を変速マップに基づいて自動的に選択して成立させる。この変速マップは、車速およびアクセル開度をパラメータとして最適なギヤ段を求めるためのマップであって、ECT−ECU200のROM内に記憶されている。
なお、車速は前記車速センサ207によって検出される。また、アクセル開度は前記アクセルペダルポジションセンサ101によって検出される。
この自動変速モードでのダウンシフトやアップシフトは、クラッチ解放動作、ギヤ段切り換え動作、クラッチ係合動作が連続的に行われる。
具体的に、前記クラッチ解放動作では、ECT−ECU200のクラッチ制御部200Aが油圧回路201を制御してクラッチアクチュエータ22を作動させることにより、摩擦クラッチ21を解放する。なお、このクラッチ解放動作に際し、エンジン負荷の軽減に伴うエンジン回転速度の吹け上がりを防止するためのエンジン制御が行われる。例えばスロットルバルブ12の開度制御等によってエンジン出力を低下させる。
前記ギヤ段切り換え動作では、ECT−ECU200の変速制御部200Bが油圧回路201を制御してセレクトアクチュエータ32およびシフトアクチュエータ33を介して変速機構3のシンクロメッシュ機構を作動させることにより、変速機構3を一旦ニュートラル状態にした後に、前記変速マップから求められた要求ギヤ段に変更する。
前記クラッチ係合動作では、ECT−ECU200のクラッチ制御部200Aが油圧回路201を制御してクラッチアクチュエータ22を作動させることにより、摩擦クラッチ21を徐々に係合させていく。
このように、自動変速モードでは、運転者によるクラッチペダル52の踏み込み操作や、シフトレバー65およびパドルスイッチ62,63の操作を行うこと無しにギヤ段が切り換えられていく。
−手動変速モード−
前述した如く、手動変速モードにあっては、クラッチ機構2の作動条件が互いに異なる操作モードとして「2ペダルモード」と「3ペダルモード」とが選択可能となっている。
2ペダルモードは、変速操作時にクラッチペダル52の踏み込み操作を必要とすること無くクラッチ機構2の係脱が自動的に行われるモードである(自動クラッチモードと呼ぶこともできる)。一方、3ペダルモードは、変速操作時にクラッチペダル52の踏み込み操作を必要とするものであって、クラッチペダル52の操作に従ってクラッチアクチュエータ22が作動してクラッチ機構2の係脱が行われるモードである(手動クラッチモードと呼ぶこともできる)。これら操作モードの切り換えは、基本的には、前記モード選択ダイヤル64の手動操作によって行われる。
<2ペダルモード>
先ず、2ペダルモードについて説明する。モード選択ダイヤル64の手動操作によって2ペダルモードが選択され、且つ運転者によってシフトレバー65が「Mポジション」に操作されている場合において、シフトレバー65がアップシフト位置またはダウンシフト位置に操作されるか、何れかのパドルスイッチ62,63が操作されて、ダウンシフトまたはアップシフトが要求されると、ECT−ECU200は、要求がダウンシフトであるのか、あるいはアップシフトであるのかを認識し、現在のギヤ段を要求ギヤ段に変更する制御を行う。
この2ペダルモードにおける変速動作は、前述した自動変速モードでの変速動作と同様に、クラッチ解放動作、ギヤ段切り換え動作、クラッチ係合動作が連続的に行われる。
具体的に、前記クラッチ解放動作では、ECT−ECU200のクラッチ制御部200Aが油圧回路201を制御してクラッチアクチュエータ22を作動させることにより、摩擦クラッチ21を解放する。
前記ギヤ段切り換え動作では、ECT−ECU200の変速制御部200Bが油圧回路201を制御してセレクトアクチュエータ32およびシフトアクチュエータ33を介して変速機構3のシンクロメッシュ機構を作動させることにより、変速機構3を一旦ニュートラル状態にした後に、前記シフトレバー65またはパドルスイッチ62,63の操作によって要求されたギヤ段に変更する。
前記クラッチ係合動作では、ECT−ECU200のクラッチ制御部200Aが油圧回路201を制御してクラッチアクチュエータ22を作動させることにより、摩擦クラッチ21を徐々に係合させていく。
<3ペダルモード>
次に、3ペダルモードについて説明する。モード選択ダイヤル64の手動操作によって3ペダルモードが選択され、且つ運転者によってシフトレバー65が「Mポジション」に操作されている場合において、クラッチペダル52の踏み込み操作が行われると、この操作に従ってECT−ECU200のクラッチ制御部200Aが油圧回路201を制御してクラッチアクチュエータ22を作動させることにより、摩擦クラッチ21を解放する。
その後、運転者によってシフトレバー65がアップシフト位置またはダウンシフト位置に操作されるか、何れかのパドルスイッチ62,63が操作されて、ダウンシフトまたはアップシフトが要求されると、ECT−ECU200の変速制御部200Bは、要求がダウンシフトであるのか、あるいはアップシフトであるのかを認識し、油圧回路201を制御してセレクトアクチュエータ32およびシフトアクチュエータ33を介して変速機構3のギヤ段を要求ギヤ段に変更する制御を行う。
その後、クラッチペダル52の踏み込み解除操作が行われると、この操作に従ってECT−ECU200のクラッチ制御部200Aが油圧回路201を制御してクラッチアクチュエータ22を作動させることにより、摩擦クラッチ21を徐々に係合させていく。
以上のように、2ペダルモードでは、シフトレバー65や各パドルスイッチ62,63の操作に従ってクラッチ機構2が作動するようになっているのに対し、3ペダルモードでは、クラッチペダル52の操作に従ってクラッチ機構2が作動するようになっている。
(クラッチペダル反力制御)
次に、本実施形態の特徴の一つであるクラッチペダル反力制御について説明する。このクラッチペダル反力制御は、前記2ペダルモードと3ペダルモードとで、クラッチペダル52の踏み込みに必要な踏力を異ならせるものである。具体的には、ECT−ECU200が、2ペダルモードが選択されている場合には、3ペダルモードが選択されている場合に比べてクラッチペダル反力を大きく設定する。これにより、2ペダルモードが選択されている場合には、3ペダルモードが選択されている場合に比べて、クラッチペダル52を踏み込むために必要となる踏力が大きくなるようにしている。
先ず、このクラッチペダル反力を変化させるための構成について説明する。図4は、クラッチペダル反力を調整するための油圧回路を示す図である。この図4に示すように、この油圧回路は、前記クラッチペダル反力を可変とするクラッチペダル反力アクチュエータ8、ソレノイドバルブ81、アキュムレータ82、圧力センサ83等を備えている。
クラッチペダル反力アクチュエータ8は、内部にピストン(図示省略)を備えた油圧シリンダから成り、このピストンから延びるロッド8aが前記クラッチペダル52の基端部近傍に連結されている。そして、ロッド8aが前進(突出)する方向の油圧がソレノイドバルブ81から作用すると、このロッド8aがクラッチペダル52を押し上げる方向への付勢力が発生し、これによりクラッチペダル反力が大きくなる。また、アクチュエータ内部の油圧がソレノイドバルブ81によってドレンされると、ロッド8aが前進する方向の油圧が小さくなってクラッチペダル反力が小さくなる。前記ソレノイドバルブ81は、内部の油路を切り換える図示しないスプールを内蔵しており、ECT−ECU200のクラッチ制御部200Aからの制御信号に従ってスプールの位置が変更されるようになっている。具体的に、このスプールは、オイルポンプPからの吐出圧をクラッチペダル反力アクチュエータ8に供給するように油路を切り換える位置と、このクラッチペダル反力アクチュエータ8内からオイルを回収してドレンするように油路を切り換える位置との間で移動可能となっている。また、このスプールの位置は、前記ECT−ECU200のクラッチ制御部200Aからの制御信号に基づくDuty制御によって連続的に変化可能となっている。これにより、クラッチペダル反力アクチュエータ8に対するオイルの供給量およびクラッチペダル反力アクチュエータ8からのオイルの排出量を連続的に変化させることが可能となり、クラッチペダル反力を連続的に変化させることが可能となっている。なお、アキュムレータ82はオイルポンプPからの吐出圧を一時的に蓄圧するものである。また、圧力センサ83は、ソレノイドバルブ81とクラッチペダル反力アクチュエータ8とを接続している各油圧ラインの内部油圧を検出する。この検出した油圧情報が前記クラッチペダル反力の制御(フィードバック制御)に利用される。また、前記オイルポンプPは、エンジン1のクランクシャフト11から回転力を受けて作動する機械式ポンプであってもよいし、電動モータを備えた電動式ポンプであってもよい。なお、クラッチペダル反力を調整可能とする構成としては前述したものには限定されない。例えば、油圧によって反力を調整するような構成ではなく、電磁力によって反力を調整する構造であってもよい。つまり、電磁力を増大させることで反力を増大させるように構成してもよい。また、その他、ガス圧を利用して反力を調整する構成や、スプリング等の付勢手段の付勢力を反力として利用すると共に反力を可変とする機構を備えさせた構成であってもよい。
次に、クラッチペダル反力制御について図5のフローチャートに沿って説明する。このフローチャートは、シフトレバー65が手動変速ポジション(Mポジション)に操作されて手動変速モードとなっている状態で、ECT−ECU200において、所定時間(数msec)毎に実行される。
先ず、ステップST1において、前記モード選択ダイヤル64の情報、および、クラッチペダルストロークの情報を取得する。つまり、現在、モード選択ダイヤル64によって選択されているモードが2ペダルモードであるのか3ペダルモードであるのかの情報、および、クラッチペダル52の踏み込み量の情報を取得する。
その後、ステップST2に移り、現在のモードが3ペダルモードであるか否かを判定する。つまり、前記取得したモード選択ダイヤル64の情報に基づき3ペダルモードが選択されているか否かを判定する。
現在のモードが3ペダルモードである場合には、ステップST2でYES判定されてステップST3に移る。一方、現在のモードが2ペダルモードである場合には、ステップST2でNO判定されてステップST4に移る。
ステップST3では、クラッチペダル反力制御に使用するマップとして3ペダルモードを対象としたクラッチペダル反力設定マップを選択する。図6(a)は、この3ペダルモードを対象としたクラッチペダル反力設定マップを示している。このクラッチペダル反力設定マップは、クラッチペダル52のストローク(踏み込み量)に応じたクラッチペダル反力を設定するためのものである。つまり、前記クラッチペダル反力アクチュエータ8によって発生するクラッチペダル反力は、このクラッチペダル反力設定マップに従って制御される。この図6(a)に示すように、3ペダルモードを対象としたクラッチペダル反力設定マップでは、クラッチペダル52の踏み込み開始時のクラッチペダル反力は比較的小さく設定されている。また、クラッチペダル52の全ストロークのうちの半分程度のストロークまでは(クラッチペダル52を全ストロークのうちの半分程度に踏み込むまでは)、クラッチペダル52の踏み込み量が多くなっていくに従って、クラッチペダル反力も次第に大きくなるように設定されている。そして、更にクラッチペダル52の踏み込み量が多くなると、クラッチペダル52の踏み込み量が多くなっていくに従って、クラッチペダル反力は次第に小さくなるように設定されている。この特性は、一般的なクラッチ機構(クラッチアクチュエータを備えておらず、踏力を油圧に変換してレリーズベアリングを作動させるクラッチ機構)の特性に近似したものとなっている。つまり、この反力設定マップに従ったクラッチペダル反力制御が行われた場合には、運転者は違和感なくクラッチペダル52の踏み込み操作を行うことになる。
一方、ステップST4では、クラッチペダル反力制御に使用するマップとして2ペダルモードを対象としたクラッチペダル反力設定マップを選択する。図6(b)は、この2ペダルモードを対象としたクラッチペダル反力設定マップを示している。このクラッチペダル反力設定マップも、クラッチペダル52のストローク(踏み込み量)に応じたクラッチペダル反力を設定するためのものである。つまり、前記クラッチペダル反力アクチュエータ8によって発生するクラッチペダル反力は、このクラッチペダル反力設定マップに従って制御される。この図6(b)に示すように、2ペダルモードを対象としたクラッチペダル反力設定マップでは、クラッチペダル52の踏み込み開始時のクラッチペダル反力は、3ペダルモードを対象としたクラッチペダル反力設定マップにおけるクラッチペダル52の踏み込み開始時のクラッチペダル反力に比べて大幅に大きくなっている。例えば5倍程度の大きなクラッチペダル反力に設定されている。この値はこれに限定されるものではなく、適宜設定される。そして、クラッチペダル52の踏み込み量が多くなっていくに従って、クラッチペダル反力も次第に大きくなるように設定されている。つまり、前記ECT−ECU200は、2ペダルモードが選択されている場合に、クラッチペダル52の踏み込み量が大きいほど、クラッチペダル反力を大きく設定するものとなっている。また、この2ペダルモードを対象としたクラッチペダル反力設定マップによって設定されるクラッチペダル反力は、クラッチペダル52の全ストロークに亘って、3ペダルモードを対象としたクラッチペダル反力設定マップによって設定されるクラッチペダル反力よりも大きくなっている。
この2ペダルモードを対象としたクラッチペダル反力設定マップは、運転者に、現在のモードが2ペダルモードであることを認識させるための特性となっている。つまり、この2ペダルモードを対象とした反力設定マップによってクラッチペダル反力が設定された場合、クラッチペダル52の踏み込みに必要な踏力が著しく大きくなるため(3ペダルモードにおいてクラッチペダル52の踏み込みに必要な踏力に比べて著しく大きくなっているため)、運転者は違和感を持つことになって、現在のモードが2ペダルモードであることを容易に認識させることが可能となっている。
前述の如くクラッチペダル反力設定マップが選択された後、ステップST5では、現在のクラッチペダルストロークに応じたクラッチペダル反力を、選択されているクラッチペダル反力設定マップから抽出し、ステップST6において、その抽出したクラッチペダル反力が得られるようにクラッチペダル反力制御(クラッチペダル反力アクチュエータ8によって発生するクラッチペダル反力の制御)を実行する。
このように、操作モードおよびクラッチペダルストロークに応じてクラッチペダル反力が調整されるようになっている。そして、前述した如く、2ペダルモードの選択時にはクラッチペダル反力が著しく大きくなっているので、運転者はクラッチペダル52の踏み込み操作に違和感を持つことになり、現在のモードが2ペダルモードであることを容易に認識することになる。仮に、現在の操作モードが2ペダルモードであり、運転者が2ペダルモードを要求している場合には、運転者の誤操作等によってクラッチペダル52を踏み込んだとしても、その踏み込みに必要な踏力が大きくなっていることで、運転者は現在の操作モードが2ペダルモードであることを認識し、直ちに踏み込みを解除することになる。これにより、運転者が要求している2ペダルモードが維持される。
(モード切り換え制御)
次に、本実施形態の特徴とするモード切り換え制御について説明する。先ず、このモード切り換え制御の概要について説明する。
前述した如く、2ペダルモードが選択されている場合には、3ペダルモードが選択されている場合よりも、クラッチペダル反力が大きく設定される。つまり、運転者に、現在のモードが2ペダルモードであることを認識させる。このような状況であるにも拘わらず、運転者がクラッチペダル52の踏み込みを継続した場合には、運転者にモード切り換えの要求があると判断する。つまり、現在のモードは2ペダルモードであるが、運転者は3ペダルモードへの切り換えを要求していると判断して、ECT−ECU200が、操作モードを3ペダルモードに自動的に切り換えるようにしている。より具体的には、2ペダルモードが選択されている場合に、運転者によるクラッチペダル52の踏み込み量が所定のモード切り換え判定踏み込み量以上となっており、その状態が所定のモード切り換え判定時間継続されたことを条件に、運転者は3ペダルモードへの切り換えを要求していると判断して、操作モードを3ペダルモードに自動的に切り換えるようにしている。
また、ECT−ECU200は、2ペダルモードが選択されている場合に、運転者によるクラッチペダル52の踏み込み量が前記モード切り換え判定踏み込み量以上となっている状態で、前記モード切り換え判定時間が経過するまでに、運転者によるアクセル操作量およびブレーキ操作量の少なくとも一方が変化した場合には、前記モード切り換え判定時間の経過を待つこと無く、操作モードを3ペダルモードに自動的に切り換えるようなっている。
このような操作モードの切り換え制御が行われるようになっているため、本発明に係る「クラッチ制御装置」は、前記ECT−ECU200およびクラッチペダル反力アクチュエータ8を備えた構成となっている。そして、このクラッチ制御装置に対する入力信号としては、シフトレバー65の操作位置の信号、モード選択ダイヤル64からのモード選択信号、クラッチペダル52の踏み込み量の信号、アクセルペダル51の踏み込み量の信号、ブレーキペダル53の踏み込み状態の信号等の各種信号が挙げられる。そして、このクラッチ制御装置は、これら信号に基づいて選択すべき操作モードを求め、選択された操作モードに従って、油圧回路201へ制御信号を出力する構成となっている。
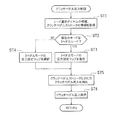
次に、モード切り換え制御の手順について図7のフローチャートを用いて具体的に説明する。このフローチャートも、シフトレバー65が手動変速ポジション(Mポジション)に操作されて手動変速モードとなっている状態で、ECT−ECU200において、所定時間(数msec)毎に実行される。
先ず、ステップST11において、各センサ等からの各種情報を取得する。例えば、前記モード選択ダイヤル64の情報、クラッチペダル52の踏み込み量の情報、アクセルペダル51の踏み込み量の情報、ブレーキペダル53の踏み込み状態の情報等を取得する。
その後、ステップST12に移り、現在のモードが2ペダルモードであるか否かを判定する。つまり、前記取得したモード選択ダイヤル64の情報に基づき2ペダルモードが選択されているか否かを判定する。
現在のモードが2ペダルモードである場合には、ステップST12でYES判定されてステップST13に移る。このステップST13では、クラッチペダル52の踏み込み量が所定のモード切り換え判定踏み込み量A以上となっているか否かを判定する。このモード切り換え判定踏み込み量Aは、クラッチペダル52の踏み込み量として80%に設定されている。この値はこれに限定されるものではなく適宜設定される。
クラッチペダル52の踏み込み量がモード切り換え判定踏み込み量A以上となっており、ステップST13でYES判定された場合には、ステップST14に移り、前記ECT−ECU200に予め備えられたモード切り換え判定フラグが「1」となっているか否かを判定する。2ペダルモードに切り換えられた時点ではモード切り換え判定フラグは「0」となっている。このため、今回ルーチンで初めてクラッチペダル52の踏み込み量が所定のモード切り換え判定踏み込み量A以上となった場合には、モード切り換え判定フラグは「0」となっており、ステップST14ではNO判定されてステップST15に移ることになる。
ステップST15では、前記ECT−ECU200に予め備えられたタイマのカウントを開始する。このタイマは、例えばカウント開始から所定のモード切り換え判定時間(例えば3sec)が経過した時点でタイムアップするものとなっている。この値はこれに限定されるものではなく適宜設定される。また、このステップST15では前記モード切り換え判定フラグが「1」にセットされる。
その後、ステップST16に移り、アクセルペダル51の操作量の変化、および、ブレーキペダル53の操作量の変化のうち少なくとも一方が生じたか否かを判定する。ここでいう操作量の変化の有無の判断としては、予め設定された範囲内での操作量変化(例えばペダルストロークの全ストロークに対して5%以内の操作量変化)については「操作量の変化無し」と判断する。この値は任意に設定可能である。なお、操作量変化が「0」である場合のみを「操作量の変化無し」と判断するようにしてもよい。
何れのペダル51,53の操作量も変化しておらず、ステップST16でNO判定された場合には、ステップST17に移り、前記タイマがタイムアップしたか否かを判定する。つまり、クラッチペダル52の踏み込み量が所定のモード切り換え判定踏み込み量A以上となった状態が所定時間(前記モード切り換え判定時間)継続したか否かを判定する。
クラッチペダル52の踏み込み量がモード切り換え判定踏み込み量A以上となった直後は未だタイマはタイムアップしておらず、ステップST17でNO判定されてリターンされる。
次回のルーチンにおいて、未だ2ペダルモードの選択が維持されており、且つクラッチペダル52の踏み込み量がモード切り換え判定踏み込み量A以上となっている場合には、ステップST12およびステップST13でそれぞれYES判定される。そして、既に、前記モード切り換え判定フラグは「1」にセットされているため、ステップST14ではYES判定されて、ステップST16に移る。前述した如くアクセルペダル51の操作量、および、ブレーキペダル53の操作量の何れも変化していない場合にはステップST16でNO判定されてステップST17に移る。
このように、2ペダルモードの選択が維持されており、且つクラッチペダル52の踏み込み量がモード切り換え判定踏み込み量A以上となっている状況で、アクセルペダル51の操作量、および、ブレーキペダル53の操作量の何れも変化していない状態が継続している場合には、ステップST11〜ST14、ST16、ST17の処理が繰り返され、タイマがタイムアップするのを待つ(前記モード切り換え判定時間が経過するのを待つ)。
そして、タイマがタイムアップして(前記モード切り換え判定時間が経過して)ステップST17でYES判定されると、ステップST18に移り、操作モードを3ペダルモードに自動的に切り換える。つまり、以後の操作にあっては、クラッチ機構2の解放および係合の各動作はクラッチペダル52の操作に従って行われるようにする。具体的には、今回の変速操作において、ステップST17でYES判定されるまでに(タイマがタイムアップし、ステップST18で3ペダルモードに切り換わるまでに)、シフトレバー65がアップシフト位置またはダウンシフト位置に操作されるか、何れかのパドルスイッチ62,63が操作されて、ダウンシフトまたはアップシフトが要求された場合には、前述した2ペダルモードでの変速動作が行われる。一方、今回の変速操作において、ステップST17でYES判定され、ステップST18で3ペダルモードに切り換わった後に、ダウンシフトまたはアップシフトが要求された場合(シフトレバー65がアップシフト位置またはダウンシフト位置に操作されるか、何れかのパドルスイッチ62,63が操作された場合)には、前述した3ペダルモードでの変速動作が行われる。つまり、ステップST18で3ペダルモードに切り換わった時点でクラッチ機構2が解放し、その後のダウンシフトまたはアップシフトの要求に応じてギヤ段切り換え動作が行われることになる。
また、このように操作モードを3ペダルモードに切り換えるのと同時に、前記モード切り換え判定フラグを「0」にリセットし、また、タイマをリセットする。
なお、このようにして操作モードが3ペダルモードに切り換えられた場合、前記表示装置71に表示している操作モードが2ペダルモード表示から3ペダルモード表示に切り換えられる。また、前記モード選択ダイヤル64に、このモード選択ダイヤル64の回動位置を変更可能とするアクチュエータを備えさせておき、前述の如く操作モードが3ペダルモードに切り換えられた際にモード選択ダイヤル64を2ペダルモードへの切り換え状態(2ペダルモードを選択している回動位置)から3ペダルモードへの切り換え状態(3ペダルモードを選択している回動位置)に切り換えておくことが好ましい。
一方、タイマがタイムアップするまでに(ステップST17でYES判定されるまでに)アクセルペダル51の操作量、および、ブレーキペダル53の操作量のうち少なくとも一方が変化した場合には、ステップST16でYES判定されてステップST18に移り、この場合にも、操作モードを3ペダルモードに自動的に切り換える。つまり、タイマのタイムアップを待つこと無しに3ペダルモードへの切り換えを行う。また、モード切り換え判定フラグを「0」にリセットし、タイマをリセットする。この場合にも、前記表示装置71に表示している操作モードが2ペダルモード表示から3ペダルモード表示に切り換えられる。また、前記モード選択ダイヤル64を2ペダルモードへの切り換え状態から3ペダルモードへの切り換え状態に切り換えておくことが好ましい。
更に、タイマがタイムアップするまでに(ステップST17でYES判定されるまでに)モード選択ダイヤル64が操作されて2ペダルモードから3ペダルモードに切り換えられた場合(ステップST12でNO判定された場合)や、クラッチペダル52の踏み込み量がモード切り換え判定踏み込み量A未満となった場合(ステップST13でNO判定された場合)には、ステップST19に移り、タイマをリセットすると共に、モード切り換え判定フラグを「0」にリセットする。この場合、操作モードは3ペダルモードとなる。
以上の動作が繰り返されることにより、モード選択ダイヤル64の操作によって3ペダルモードに切り換えられる場合だけでなく、クラッチペダル52の踏み込み量がモード切り換え判定踏み込み量A以上である状態がモード切り換え判定時間継続された場合にも、2ペダルモードから3ペダルモードに切り換えられることになる。
図8は、クラッチペダル52の踏み込み量がモード切り換え判定踏み込み量以上となっている状態で前記タイマがタイムアップした場合のモード切り換え動作を示すタイミングチャート図である。
2ペダルモードが選択されて車両が走行している状況において、図中のタイミングt1でクラッチペダル52の踏み込み操作が開始され、タイミングt2で、そのクラッチペダル52の踏み込み量が前記モード切り換え判定踏み込み量Aに達している。この時点で、前記モード切り換え判定フラグは「1」にセットされ、また、タイマのカウントが開始される。そして、クラッチペダル52の踏み込み量が前記モード切り換え判定踏み込み量Aを下回ること無く、且つアクセルペダル51の踏み込み量およびブレーキペダル53の踏み込み量の何れも変化していない状態が継続し、図中のタイミングt3でタイマがタイムアップすると、操作モードが2ペダルモードから3ペダルモードに切り換わる。また、この操作モードの切り換えと同時に、モード切り換え判定フラグが「0」にリセットされ、タイマもリセットされる。
また、図9は、タイマがタイムアップする前にアクセルペダル51の踏み込み量が変化した場合のモード切り換え動作を示すタイミングチャート図である。
2ペダルモードが選択されて車両が走行している状況において、図中のタイミングt1でクラッチペダル52の踏み込み操作が開始され、タイミングt2で、そのクラッチペダル52の踏み込み量が前記モード切り換え判定踏み込み量Aに達している。この時点で、前記モード切り換え判定フラグは「1」にセットされ、また、タイマのカウントが開始される。そして、タイマがタイムアップするまでのタイミングである図中のタイミングt4において、アクセルペダル51の踏み込み量が変化している(所定量以上変化している)。この図9に示すものでは、アクセルペダル51の踏み込み量が小さくなる方向に変化している。この時点で操作モードが2ペダルモードから3ペダルモードに切り換わる。また、この操作モードの切り換えと同時に、モード切り換え判定フラグが「0」にリセットされ、タイマもリセットされる。
以上説明したように、本実施形態では、2ペダルモードが選択されている場合には、3ペダルモードが選択されている場合に比べてクラッチペダル反力を大きくし、これによって、現在のモードが2ペダルモードであることを運転者に容易に認識させることができるようにしている。そして、それにも拘わらず、クラッチペダル52の踏み込み量がモード切り換え判定踏み込み量以上である状態がモード切り換え判定時間継続された場合には、2ペダルモードから3ペダルモードに自動的に切り換わるようにしている。つまり、運転者がクラッチペダル52を踏み込んだ時点で3ペダルモードに切り換えるのではなく、クラッチペダル52の踏み込みが所定時間継続されたことを条件に3ペダルモードに切り換えるようにしている。このため、運転者の意図を正確に反映し且つ煩雑な操作(クラッチペダル52の踏み込み操作以外の特別な操作)を必要とすること無しに操作モードの切り換えが可能となる。
また、本実施形態では、前記タイマがタイムアップするまでにアクセルペダル51の操作量、および、ブレーキペダル53の操作量のうち少なくとも一方が変化した場合には、操作モードを3ペダルモードに自動的に切り換えるようにしている。つまり、運転者は3ペダルモードでの走行を意図した操作を行っており、現在の操作モードが3ペダルモードであると思ってアクセル操作やブレーキ操作を行っているか、または、3ペダルモードへの切り換えを要求している可能性が高いため、それに迅速に応答するべく、タイマのタイムアップを待つこと無しに3ペダルモードへの切り換えを行うようにしている。これにより、運転者の意図する操作モードへの迅速な切り換えが可能となる。
更に、本実施形態では、2ペダルモードが選択されている場合には、クラッチペダル52の踏み込み量が多くなっていくに従って、クラッチペダル反力も次第に大きくなるように設定されている(図6(b)のクラッチペダル反力設定マップを参照)。このため、運転者は、クラッチペダル52を踏み込んでいくほど、その踏み込みに必要な踏力が大きくなっていくことを感じる。これにより、現在の操作モードが2ペダルモードであることを運転者に確実に認識させることができる。
(他の実施形態)
なお、本発明は、前記実施形態のみに限定されるものではなく、特許請求の範囲内および当該範囲と均等の範囲で包含されるすべての変形や応用が可能である。以下で例を挙げる。
前記実施形態では、FR方式の車両に本発明を適用した場合について説明したが、FF(フロントエンジン・フロントドライブ)方式の車両や、ミッドシップ方式の車両に対しても本発明は適用可能である。また、変速機構3は、前進6段とする例を挙げているが、本発明はこれに限定されることなく、ギヤ段の数は任意に設定可能である。
また、前記実施形態では、クラッチアクチュエータ22、セレクトアクチュエータ32、シフトアクチュエータ33それぞれを油圧作動式とした場合について説明した。本発明はこれに限らず、これらアクチュエータを電動モータや減速機構を用いる電気作動式とすることも可能である。
また、前記実施形態では、変速機構3のギヤ段を切り換える構成としては、セレクトアクチュエータ32およびシフトアクチュエータ33を備えた所謂シフトバイワイヤシステムとしていた。本発明はこれに限らず、運転者のシフトレバーへの操作力を、フォークシャフト等を介してシンクロメッシュ機構に直接的に伝達する構成であってもよい。
更に、前記実施形態では、現在のモードが2ペダルモードであることを運転者に認識させる手段としてクラッチペダル反力を大きくしていた。これに加えて、前記表示装置71における操作モードの表示箇所を点滅させることで、現在のモードが2ペダルモードであることを運転者により確実に認識させるようにしてもよい。
また、前記実施形態では、2ペダルモードが選択されている場合に、運転者によるクラッチペダル52の踏み込み量がモード切り換え判定踏み込み量以上となっている状態で、運転者によるアクセル操作量およびブレーキ操作量の少なくとも一方が変化した場合には、2ペダルモードから3ペダルモードに切り換えるようにしていた。これに限らず、2ペダルモードが選択されている場合に、運転者によるクラッチペダル52の踏み込み量がモード切り換え判定踏み込み量以上となった際のその踏み込み速度が所定速度以上であった場合には2ペダルモードから3ペダルモードに切り換えるようにしてもよい。