以下、添付図面を参照しながら、本発明を実施するための形態(以下「実施形態」という。)について説明する。なお、本明細書及び図面において、実質的に同一の構成要素については同一の符号を用いる。図面に描かれた形状は、当業者が理解しやすいように描かれているため、実際の寸法及び比率とは必ずしも一致していない。
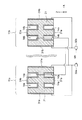
図1は、実施形態1の圧電センサを示す斜視図である。図2及び図3は、図1の圧電センサの表面を示す平面図である。図4は、図2におけるIV−IV線断面図である。図5は、図2におけるV−V線断面図である。以下、これらの図面に基づき、実施形態1の圧電センサを説明する。
各図において、水晶の結晶軸をX,Y,Zで示し、三次元座標をx,y,zで示す。特許請求の範囲に記載の「第一の方向に屈曲振動する」とは、第一の方向への屈曲とその逆方向への屈曲とを交互に繰り返すことをいう。「第二の方向に屈曲振動する」についても同様である。「分極方向」は圧電性及び逆圧電性が生じる方向(電気軸方向)であり、水晶の分極方向はX軸方向である。本実施形態1における「x方向」及び「z方向」は、それぞれ特許請求の範囲における「第一の方向」及び「第二の方向」の一例に相当する。本実施形態1における水晶片21及び水晶片22は、それぞれ特許請求の範囲における「第一の水晶片」及び「第二の水晶片」の一例に相当する。
まず、図1に基づき、本実施形態1の基本的な構成を説明する。図1では、わかりやすくするために、一部を切り欠いて示すとともに電極等を省略している。
本実施形態1の圧電センサ1は、少なくとも水晶片21,22からなり、支持部10、駆動部(駆動腕11a,11b)及び検出部(検出腕12a,12b,13a,13b)を備えている。駆動部(駆動腕11a,11b)は、支持部10に設けられ、電圧Vin(図4)によって分極方向であるx方向に屈曲振動する。検出部(検出腕12a,12b,13a,13b)は、支持部10に設けられ、x方向の屈曲振動に関係するコリオリ力によってx方向と垂直かつ分極方向であるz方向に屈曲振動し、この屈曲振動によって電圧Vout(図5)を発生する。
支持部10は、両端が固定された棒状である。駆動部(駆動腕11a,11b)は、支持部10の中央から互いに逆方向に延びる二本の駆動腕11a,11bからなる。検出部(検出腕12a,12b,13a,13b)は、駆動部(駆動腕11a,11b)を挟んで支持部10に設けられた第一の検出部(検出腕12a,12b)及び第二の検出部(検出腕13a,13b)からなる。第一の検出部(検出腕12a,12b)は支持部10から互いに逆方向に延びる二本の検出腕12a,12bからなり、第二の検出部(検出腕13a,13b)は支持部10から互いに逆方向に延びる二本の検出腕13a,13bからなる。
駆動腕11a,11bは、互いに逆相になるようにx方向に屈曲振動する。検出腕12a,12bは、駆動腕11a,11bよって支持部10を介して付勢されて、互いに逆相になるようにx方向に屈曲振動し、x方向の屈曲振動(速度v)及び検出腕12a,12bの回転(角速度Ω)に起因するコリオリ力Fcによって互いに逆相になるようにz方向に屈曲振動する。検出腕13a,13bも、検出腕12a,12bと同様にz方向に屈曲振動する。
また、圧電センサ1は外枠15を更に備えている。外枠15は、支持部10、駆動腕11a,11b及び検出腕12a,12b,13a,13bを囲むとともに、支持部10に設けられている。そして、駆動腕11a,11bは、x方向にX軸を有する水晶片21からなる。検出腕12a,12b,13a,13bは、z方向にX軸を有する水晶片22からなる。つまり、三次元座標のx,y,zを、水晶片21の結晶軸のX,Y,Zに合せている。
外枠15の四隅の内側には、それぞれ固定部16が形成されている。各固定部16は、それぞれ一つずつ合計四つのビア孔25a,25b,25c,25dを有する。支持部10の両端はそれぞれ二つに分岐し、各先端がビア孔25a,25b,25c,25dの部分で固定部16に接合される。外枠15は、キャビティ17を介して水晶片21,22を囲む。
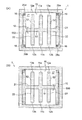
次に、電極等を書き入れた図2乃至図5を加え、図1乃至図5に基づき圧電センサ1の詳細な構成を説明する。なお、わかりやすくするために、図2では配線を省略し、図3では配線を記入するとともに電極及び配線以外の符号を省略している。
駆動腕11a,11bは、それぞれ棒状かつ直方体状であり、棒状の支持部10から互いに反対方向に延設されている。駆動腕11a,11bの長さ方向には、それぞれ溝部14a,14bが設けられている。溝部14a,14bは、駆動腕11aの表裏面に二本ずつ及び駆動腕11bの表裏面に二本ずつ、支持部10との境界部分から駆動腕11a,11bの先端に向って、駆動腕11a,11bの長さ方向と平行に所定の長さで設けられる。なお、溝部14a,14bは、表裏面のどちらか一方にのみ設けてもよく、あるいは一本も設けなくてもよい。
駆動腕11aには、水晶片21を挟んで対向する平面同士が同極となるように、両側面に励振電極31aが設けられ、表裏面の溝部14aの内側に励振電極31bが設けられる。同様に、駆動腕11bには、水晶片21を挟んで対向する平面同士が同極となるように、両側面に励振電極31bが設けられ、表裏面の溝部14bの内側に励振電極31aが設けられる。したがって、駆動腕11aにおいては両側面に設けられた励振電極31aと溝部14a内に設けられた励振電極31bとが異極同士となり、駆動腕11bにおいては両側面に設けられた励振電極31bと溝部14b内に設けられた励振電極31aとが異極同士となる。励振電極31aと励振電極31bとの間には、交流の電圧Vinが印加される。
検出腕12a,12bは、それぞれ棒状かつ直方体状であり、棒状の支持部10のから互いに反対方向に延設されている。ただし、検出腕12a,12bは、支持部10上において、駆動腕11a,11bから離れた位置に設けられている。
検出腕12aには、水晶片22を挟んで対向する平面同士が同極となるように、表裏面に検出電極31cが設けられ、両側面に検出電極31dが設けられる。同様に、検出腕12bには、水晶片22を挟んで対向する平面同士が同極となるように、表裏面に検出電極31dが設けられ、両側面に検出電極31cが設けられる。したがって、検出腕12aにおいては表裏面に設けられた検出電極31cと両側面に設けられた検出電極31dとが異極同士となり、検出腕12bにおいては表裏面に設けられた検出電極31dと両側面に設けられた検出電極31cとが異極同士となる。検出電極31cと検出電極31dとの間からは、交流の電圧Voutが出力される。なお、駆動腕11a,11bと同様に、検出腕12a,12bの両側面に溝部を設け、それらの溝部の内側にそれぞれ検出電極31c,31dを設けてもよい。
検出腕13a,13bも、検出腕12a,12bと同じ構造かつ同じ大きさである。検出腕12a,12bと検出腕13a,13bとは、支持部10上において駆動腕11a,11bを中心に対称となる位置に設けられている。
支持部10は、棒状かつ直方体状である。水晶片21は、支持部10と駆動腕11a,11bとが一体となって十字状をなしている。支持部10の両端から延びた部分には、パッド電極32a,32b,32c,32dが設けられている。パッド電極32a,32b,32c,32dは、ビア孔25a,25b,25c,25dに対応して設けられ、それぞれビア孔25a,25b,25c,25d内の導体を介して外部端子45a,45b,45c,45d(図10)と電気的に接続される。なお、図面では支持部10の両端が外枠15から離れているが、支持部10の両端を確実に固定するために、支持部10の両端を外枠15に固定してもよい。
図3に示すように、支持部10、駆動腕11a,11b及び検出腕12a,12b,13a,13bの表裏面及び両側面において、電極が形成されていない領域には、電極同士を電気的に接続する配線33a,33b,33c,33dが設けられている。配線33aはパッド電極32aと励振電極31aとを接続し、配線33bはパッド電極32bと励振電極31bとを接続し、配線33cはパッド電極32cと検出電極31cとを接続し、配線33dはパッド電極32dと検出電極31dとを接続する。図3では結線関係のみを示すが、実際の配線33a,…は、一定の線幅を有し、各面に接している。
なお、配線33a,…の代わりにボンディングワイヤを用いて、電極同士を接続してもよい。ただし、配線33a,…は電極と同時に形成できるので、配線33a,…を用いた場合は製造工程を簡素化できる。
次に、図1乃至図5に図6を加えて、圧電センサ1の動作について説明する。
駆動腕11a,11bを振動させる場合、パッド電極32a,32bに交流の電圧Vinを印加する。印加後のある電気的状態を瞬間的に捉えると、駆動腕11aの表裏の溝部14aに設けられた励振電極31bはプラス電位となり、駆動腕11aの両側面に設けられた励振電極31aはマイナス電位となり、プラスからマイナスに電界が生じる。このとき、駆動腕11bの表裏の溝部14bに設けられた励振電極31aはマイナス電位となり、駆動腕11bの両側面に設けられた励振電極31bはプラス電位となり、駆動腕11aに生じた極性とは反対の極性となり、プラスからマイナスに電界が生じる。この交流の電圧Vinで生じた電界によって、駆動腕11a,11bに伸縮現象が生じることにより、互いに逆相となる屈曲振動モードが得られる。
このとき、駆動腕11a,11bの振動は、支持部10を介して検出腕12a,12b,13a,13bへ伝わる。この振動に支持部10及び検出腕12a,…が共振すると、検出腕12a,…も振動する。支持部10及び検出腕12a,…が共振するか否かは、駆動腕11a,11bの振動周波数、支持部10及び検出腕12a,…の材質、構造及び寸法、支持部10に対しての検出腕12a,…の取り付け位置などによって決まる。検出腕12a,…の振動モードには、図6[A1][A2]に示すように駆動腕11a,11bに対して同相で振動する場合、図6[B1][B2]に示すように駆動腕11a,11bに対して逆相で振動する場合などがある。
ここで、図1に示すように、屈曲振動によって±x方向へ速度vで移動する質量mの検出腕12a,12bが、原点からy軸方向を見てy軸を中心に時計回りに角速度Ωで回転したとする。このとき、図6[A1]及び図6[B2]に示すように、−x方向へ速度vで移動する検出腕12aは−z方向のコリオリ力Fc(Fc=−2mΩ×v)を受け、x方向へ速度vで移動する検出腕12bはz方向のコリオリ力Fcを受ける。逆に、図6[A2]及び図6[B1]に示すように、x方向へ速度vで移動する検出腕12aはz方向のコリオリ力Fcを受け、−x方向へ速度vで移動する検出腕12bは−z方向のコリオリ力Fcを受ける。したがって、検出腕12a,12bは、±z方向のコリオリ力を受けてz方向にも互いに逆相で屈曲振動するとともに、z方向にX軸を有する水晶片22からなるので、圧電効果による電圧Voutを出力する。これにより、電圧Voutの値から角速度Ωの値を求めることができる。なお、このときの検出腕12a,12bの先端は、±y方向から見て楕円を描くようにつまり±x方向かつ±z方向に振動する。また、検出腕12a,12bがz方向に互いに逆相で屈曲振動することにより、検出腕12a,12bに加わる同じ±z方向の加速度の影響は検出腕12a,12b同士で相殺される。
検出腕13a,13bの動作も検出腕12a,12bの動作と同様である。検出腕13a,13bと検出腕12a,12bとは、駆動腕11a,11bを挟んで対称になるように支持部10設けられているので、バランスよく振動する。
次に、圧電センサ1の効果について説明する。
検出腕12a,…がその分極方向の屈曲振動による電圧を発生することにより大きな信号が得られるとともに、支持部10に駆動腕11a,11b及び検出腕12a,…が設けられることにより、結合子を用いて音叉振動子同士を固定する場合に比べて、構成が簡素かつ小型で製造も容易である。
次に、図7乃至図9に基づき、圧電センサ1の製造方法の一例(以下「実施形態1の製造方法」という。)について説明する。
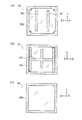
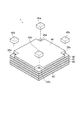
図7は実施形態1の製造方法における第一工程及び第二工程を示す平面図であり、図7[A]は上側ウェハ、図7[B]は中間ウェハ、図7[C]は下側ウェハである。図8は、実施形態1の製造方法における第三工程を示す斜視図である。図9は実施形態1の製造方法における第四工程を示し、図9[A]は平面図、図9[B]は底面図である。なお、圧電センサは、わかりやすくするために全ての図面で一個分のみを示すが、実際には一枚のウェハに多数個が形成され、最終工程で一個ずつに分離される。
本実施形態1の製造方法は、次の第一乃至第四工程を含む。以下の説明における水晶片21,22、外枠15、固定部16、キャビティ17及びビア孔25a,25b,25c,25dは、図1及び図9に記載されている。なお、本実施形態1における中間ウェハ41及び上側ウェハ42は、特許請求の範囲における「第一のウェハ」及び「第二のウェハ」の一例に相当する。
第一工程(図7[B]);中間ウェハ41に、水晶片21をウェットエッチングにより形成するための耐食膜51、及び、外枠15をウェットエッチングにより形成するための耐食膜551のパターンを形成する。
第二工程(図7[A]):上側ウェハ42に、水晶片22をウェットエッチングにより形成するための耐食膜52、及び、外枠15をウェットエッチングにより形成するための耐食膜552のパターンを形成する。
第三工程(図8):耐食膜51,551が形成された中間ウェハ41と耐食膜52,552が形成された上側ウェハ42とを、それぞれの厚み方向に貼り合せる。
第四工程(図9):貼り合わされた中間ウェハ41及び上側ウェハ42に対しウェットエッチングを施すことにより、水晶片21,22及び外枠15を形成する。
本実施形態1では、次の第五工程(図7[C])を更に含む。第五工程(図7[C])では、下側ウェハ40に、外枠15をウェットエッチングにより形成するための耐食膜550のパターンを形成する。そして、第三工程(図8)では、中間ウェハ41の一方の面を上とし他方の面を下としたとき、中間ウェハ41の上に上側ウェハ42を貼り合せ、中間ウェハ41の下に下側ウェハ40を貼り合せる。第二工程(図7[A])で形成する耐食膜552のパターンには、固定部16及びビア孔25a,25b,25c,25dをウェットエッチングで形成するための耐食膜のパターンも含まれる。
耐食膜51,52,550,551,552は、拡散接合に用いられる接合膜を兼ねている。第三工程では、中間ウェハ41と上側ウェハ42とを耐食膜51,52,551,552を介して拡散接合により貼り合せ、中間ウェハ41と下側ウェハ40とを耐食膜551,550を介して拡散接合により貼り合せる。
第一乃至第五工程の順番は、第一、第二及び第五工程→第三工程→第四工程である。ただし、第一、第二及び第五工程は、どのような順番でもよく、同時でもよい。
次に、上記第一乃至第五工程について、更に詳しく説明する。
第一工程(図7[B])について説明する。中間ウェハ41は、Z板と呼ばれる水晶ウェハである。耐食膜51,551のパターンは、中間ウェハ41の表裏で同じものを形成する。耐食膜51のパターンと耐食膜551のパターンとは、電気的に絶縁するために、分離されている。耐食膜51のパターンには、図示しないが、溝部14a,14b(図4)を形成するためのエッチング抑制パターン(例えば特許文献3参照)を形成するためのパターンが含まれている。なお、水晶は、シリコンと酸素で構成される三方晶系の単結晶からなり、成長軸(光軸)をZ軸とし、これと垂直に稜線を結ぶ三本の軸をX軸(電気軸)とし、これと直交する軸をY軸(機械軸)として表現される。それらの軸のウェットエッチング中のエッチング速度は、Z>X>Yの順となる。
第二工程(図7[A])について説明する。上側ウェハ42は、X板と呼ばれる水晶ウェハである。耐食膜52、552のパターンは上側ウェハ42の表裏で同じものを形成する。耐食膜52のパターンと耐食膜552のパターンとは、電気的に絶縁するために、分離されている。
第五工程(図7[C])について説明する。下側ウェハ40も、中間ウェハ41又は上側ウェハ42と同じ水晶ウェハである。ただし、中間ウェハ41でのエッチングの進行を表裏で均等にするために、下側ウェハ40は上側ウェハ42と同じX板を用いることが望ましい。同じ理由により、下側ウェハ40は上側ウェハ42よりも厚いZ板を用いてもよい。なお、下側ウェハ40は、圧電性が不要であるので、第三工程でエッチングされる材料であればよく、例えばガラス基板などを用いてもよい。耐食膜550のパターンは下側ウェハ40の表裏で同じものを形成する。
第三工程(図8)について説明する。第三工程では、上側ウェハ42、中間ウェハ41及び下側ウェハ40の貼り合せに、原子拡散接合法と呼ばれる拡散接合を用いる。この場合、耐食膜51,52,550,551,552として例えばクロムを下地とした金を用い、上側ウェハ42、中間ウェハ41及び下側ウェハ40に対して、所定のアライメントをした後、加熱しながら加圧することにより接合する。その結果、耐食膜51と耐食膜52とが接合され、耐食膜51,551と耐食膜552とが接合され、耐食膜551と耐食膜550とが接合される。耐食膜51,52,550,551,552のうち接合に用いられた部分の多くは、以後露出することが無いので、ウェットエッチングの耐食膜として用いられない。なお、ウェハの貼り合せ方法としては、拡散接合に代えて、接着剤や陽極酸化などの手法を用いることもできる。
第四工程(図9)について説明する。第四工程では、図8に示す上側ウェハ42、中間ウェハ41及び下側ウェハ40からなる積層体に対して、例えばバッファードフッ酸(HF+NH4F)を用いてウェットエッチングを施す。これにより、耐食膜51,52,550,552で表裏を覆われていない部分の水晶ウェハが抜け落ち、図9に示すように水晶片21,22、外枠15、固定部16、キャビティ17及びビア孔25a,25b,25c,25dが形成される。外枠15は、上側ウェハ42、中間ウェハ41及び下側ウェハ40由来の三層構造からなり、素子搭載部材の枠部となる。中間ウェハ41由来の水晶片21は、上側ウェハ42由来の固定部16のみによって固定される。
また、第三工程(図8)と第四工程(図9)の間で、貼り合わされた上側ウェハ42、中間ウェハ41及び下側ウェハ40のうち、上側ウェハ42及び下側ウェハ40の少なくとも一方を研磨する工程を含めてもよい。更に、上側ウェハ42及び下側ウェハ40の少なくとも一方を消滅するまで研磨し、続いて中間ウェハ41を研磨するようにしてもよい。この場合、その研磨された面に対して、必要に応じ、第四工程(図9)の前に耐食膜を成膜及びパターニングする。
次に、第四工程(図9)の後の工程について説明する。前述の図2乃至図5は、実施形態1の製造方法によって得られる電極形成後の圧電センサを示す。以下、図9及び図2乃至図5に基づき説明する。
第四工程の後に、露出している耐食膜51,52,550,552(図9)の全部又は一部をエッチングにより除去する。耐食膜の一部除去には、金属膜のパターニングを用いる。金属膜のパターニングとは、例えば、金属膜の全体を電着法やスプレー塗布などによりフォトレジスト膜で覆い、ステッパなどによりフォトレジスト膜を露光し、現像することによりフォトレジスト膜を部分的に残し、残ったフォトレジスト膜をマスクにして金属膜をエッチングにより除去することである。このとき、図9に示す平面及び底面以外の、側面のフォトレジスト膜の露光には、斜め露光などの手法を用いる。
例えば、パッド電極32a,32b,32c,32d(図2)となる領域の耐食膜51は、ビア孔25a,25b,25c,25dとの導通を得るために残す必要がある。また、金のエッチングには例えばヨウ素とヨウ化カリウムの混合液を用い、クロムのエッチングには例えば硝酸第二セリウムアンモニウムと過塩素酸の混合液を用いる。
続いて、耐食膜51,52,550,552の全部又は一部が除去された水晶片21,22、外枠15、固定部16及びビア孔25a,25b,25c,25d,…の全体に、電極となる金属膜(図示せず)をスパッタリングなどにより成膜する。金属膜は、例えばチタンの上にパラジウム又は金が設けられた二層構造である。その金属膜をパターニングすることにより、電極形成後の圧電センサ1(図2乃至図5)が得られる。
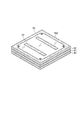
電極形成後の圧電センサ1は、その後の工程でパッケージが組み立てられる。図10は、実施形態1の製造方法によって得られるパッケージ組立て後の圧電センサを示す斜視図である。以下、この図面に基づき説明する。
この工程では、電極形成後の圧電センサ1に対して、真空中又は不活性ガス雰囲気中で、下側ウェハ40の下に素子搭載部材の基板部となる基板部ウェハ43を貼り合せ、上側ウェハ42の上に蓋部材となる蓋部材ウェハ44を貼り合せる。これにより、圧電センサ1は、基板部ウェハ43と蓋部材ウェハ44とによって挟持され気密化される。
基板部ウェハ43及び蓋部材ウェハ44は矩形平板状である。蓋部材ウェハ44は、その内側にキャビティ用の凹部(図示せず)を有し、その四隅に外部端子45a,45b,45c,45dを有する。ビア孔25a,25b,25c,25dには、例えば銅などからなる埋込み電極(図示せず)が形成される。外部端子45aは、ビア孔25aの埋込み電極を介して、パッド電極32a(図2)に電気的に接続される。同様に、外部端子45b,45c,45dもそれぞれパッド電極32b,32c,32d(図2)に電気的に接続される。なお、基板部ウェハ43及び蓋部材ウェハ44の貼り合せ方法は上側ウェハ42、中間ウェハ41及び下側ウェハ40を貼り合せた方法と異なっていてもよく、基板部ウェハ43及び蓋部材ウェハ44の材質もこれらのウェハと同じである必要はない。
最後に、蓋部材ウェハ44、上側ウェハ42、中間ウェハ41、下側ウェハ40及び基板部ウェハ43からなる積層体を、ダイシンングなどの手法により一個ずつ分離することで、圧電センサ1が完成する。
次に、本実施形態1の製造方法の作用及び効果について説明する。
(1)水晶ウェハに水晶片及び外枠を形成した後、この水晶ウェハを他のウェハに貼り合せる場合は、強度が弱くなった水晶ウェハを貼り合せのためにハンドリングするので、水晶ウェハの損傷を招くことになる。これに対し、本実施形態1では、その発想を逆転させ、耐食膜51,52,550,551,552が形成された中間ウェハ41、上側ウェハ42及び下側ウェハ40を貼り合せた後に、これらの貼り合された中間ウェハ41、上側ウェハ42及び下側ウェハ40にウェットエッチングを施すことにより、水晶片21,22及び外枠15を形成する。そのため、水晶片21,22と外枠15とが一体的に形成された中間ウェハ41を、貼り合せのためにハンドリングする必要がなくなり、これにより生産性及び歩留まりを向上できる。
(2)換言すると、水晶片21や外枠15が形成されて強度が低下した中間ウェハ41を貼り合せる工程がない。そのため、水晶片21,22が形成される中間ウェハ41を薄くしても、中間ウェハ41の割れや反りが問題にならず、十分な強度を確保できる。したがって、水晶片21,22の厚みの薄い小型の圧電センサ1を実現できる。
(3)下側ウェハ40を用いた場合は、中間ウェハ41を上側ウェハ42とともに表裏から挟んでエッチングできるので、中間ウェハ41に形成される水晶片21のエッチングの進行を表裏で均等化できるとともに、基板部ウェハ43と水晶片21との空間を確保できるので、基板部ウェハ43の形状を平板などに単純化できる。
(4)耐食膜51,52,550,551,552が拡散接合に用いられる接合膜を兼ねる場合は、拡散接合に用いた接合膜をそのままウェットエッチングのマスクとして用いることができるので、製造工程を簡素化できる。
(5)貼り合せ後の中間ウェハ41の強度が十分保たれていることから、貼り合せ後に上側ウェハ42及び下側ウェハ40の少なくとも一方、又は更に中間ウェハ41も研磨することにより、圧電センサ1の厚みを薄くすることが可能である。
次に、図11乃至図14に基づき、実施形態2の圧電センサについて説明する。
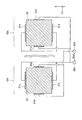
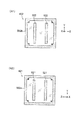
図11は、実施形態2の圧電センサを示す斜視図である。図12及び図13は、図11の圧電センサの表面を示す平面図である。図14は、図12におけるXIII−XIII線断面図である。ただし、図12では配線を省略し、図13では配線を記入するとともに電極及び配線以外の符号を省略している。なお、本実施形態2における水晶片221及び水晶片222は、それぞれ特許請求の範囲における「第二の水晶片」及び「第三の水晶片」の一例に相当する。
本実施形態2の圧電センサ2は、検出腕12a,12b,13a,13bの構造が実施形態1と異なる。検出腕12a,12b,13a,13bはz方向に積層されるとともに互いに逆となる分極方向を有する第一層及び第二層を含む。その第一層はz方向にX軸を有する水晶片221からなり、その第二層は−z方向にX軸を有する水晶片222からなる。
図15[A]は実施形態1における検出腕の動作を示す断面図であり、図15[B]は実施形態2における検出腕の動作を示す断面図である。以下、この図面に基づき、実施形態1、2における検出腕の動作を説明する。
図15[A]に示すように、実施形態1における検出腕12aはz方向にX軸を有する水晶片22からなる。そのため、例えばz方向の屈曲に対して、水晶片22の縮む側ではz方向に正電荷かつ−z方向に負電荷が生じ、水晶片22の伸びる側ではz方向に負電荷かつ−z方向に正電荷が生じる。したがって、z方向に対向する一対の検出電極31cが正電位となり、y方向に対向する一対の検出電極31dが負電位となるので、検出電極31c,31dから電圧Voutが取り出せる。ただし、このような分極は微視的な電気双極子が整列することで引き起こされているので、水晶片22内で電荷が移動することはない。そのため、検出電極31dでは、水晶片22表面の線状に分布する負電荷しか利用できない。
これに対し、図15[B]に示すように、本実施形態2における検出腕12aは、z方向にX軸を有する水晶片221と、−z方向にX軸を有する水晶片222とが、z方向に積層された構造からなる。そのため、例えばz方向の屈曲に対して、縮む側である水晶片222ではz方向に負電荷かつ−z方向に正電荷が生じ、伸びる側である水晶片221ではz方向に負電荷かつ−z方向に正電荷が生じる。したがって、検出電極31cが負電位となり、検出電極31dが正電位となるので、z方向に互いに対向する検出電極31c,31dのみから電圧Voutが取り出せる。しかも、検出電極31cでは面状に分布する負電荷を利用でき、検出電極31dでも面状に分布する正電荷を利用できる。
次に、圧電センサ2の効果について説明する。
検出腕12a,…を構成する水晶片221,222がz方向の屈曲振動に対して常に同一方向の電界を発生することにより、z方向に二枚の検出電極31c,31dを配置するだけで電圧Voutを取り出せるので、配線を簡素化できる。具体的には、本実施形態2では、実施形態1で必要であった、検出腕の両側面の検出電極が不要となる。
また、検出電極31c,31dでは面状に分布する電荷を利用できるので、圧電センサ2の検出感度及び検出精度を向上できる。なぜなら、圧電センサ2が利用できる電荷量が大きいほど、その検出感度及び検出精度が向上するからである。なお、電圧Voutは入力した電荷量をチャージアンプなどで電圧に変換したものとしてもよい。
次に、図16及び図7乃至図9に基づき、圧電センサ2の製造方法の一例(以下「実施形態2の製造方法」という。)について説明する。
本実施形態2の製造方法は、図7乃至図9における上側ウェハ42の代わりに第一上側ウェハ421及び第二上側ウェハ422を用いる点のみが実施形態1と異なる。そこで、図7乃至図9を流用して、本実施形態2の製造方法を説明する。図16は実施形態2の製造方法における第二工程及び第三工程を示す平面図であり、図16[A1]は第二上側ウェハ、図16[A2]は第一上側ウェハである。図7は実施形態2の製造方法における第一工程及び第六工程を示す平面図であり、図7[B]は中間ウェハ、図7[C]は下側ウェハである。図8は、実施形態2の製造方法における第四工程を示す斜視図である。図9は実施形態2の製造方法における第五工程を示し、図9[A]は平面図、図9[B]は底面図である。
本実施形態2の製造方法は、次の第一乃至第五工程を含む。以下の説明における水晶片21,221,222及び外枠15は、図11に記載されている。なお、本実施形態2における中間ウェハ41、第一上側ウェハ421及び第二上側ウェハ422は、それぞれ特許請求の範囲における「第一のウェハ」、「第二のウェハ」及び「第三のウェハ」の一例に相当する。
第一工程(図7[B]):中間ウェハ41に、水晶片21をウェットエッチングにより形成するための耐食膜51、及び、外枠15をウェットエッチングにより形成するための耐食膜551のパターンを形成する。
第二工程(図16[A2]):第一上側ウェハ421に、水晶片221をウェットエッチングにより形成するための耐食膜521、及び、外枠15をウェットエッチングにより形成するための耐食膜552aのパターンを形成する。
第三工程(図16[A1]):第二上側ウェハ422に、水晶片222をウェットエッチングにより形成するための耐食膜522、及び、外枠15をウェットエッチングにより形成するための耐食膜552bのパターンを形成する。
第四工程(図8):耐食膜51,551が形成された中間ウェハ41と耐食膜521,552aが形成された第一上側ウェハ421とを、耐食膜521,552aが形成された第一上側ウェハ421と耐食膜522,552bが形成された第二上側ウェハ422とを、それぞれの厚み方向に貼り合せる。
第五工程(図9):貼り合わされた中間ウェハ41、第一上側ウェハ421及び第二上側ウェハ422に対しウェットエッチングを施すことにより、水晶片21,221,222及び外枠15を形成する。
本実施形態2では、次の第六工程(図7[C])を更に含む。第六工程(図7[C])では、下側ウェハ40に、外枠15をウェットエッチングにより形成するための耐食膜550のパターンを形成する。第二工程(図16[A1])及び第三工程(図16[A2])で使用する第一上側ウェハ421及び第二上側ウェハ422は、どちらもX板と呼ばれる水晶ウェハである。だだし、第四工程(図8)では、第一上側ウェハ421及び第二上側ウェハ422のX軸が互いに逆になるように貼り合せる。
本実施形態2の製造方法は、図7乃至図10において上側ウェハ42が第一上側ウェハ421及び第二上側ウェハ422に置き換わり、水晶片22が水晶片221,222に置き換わった点を除き、実施形態1の製造方法と同様である。
本実施形態2の製造方法によれば、実施形態1の製造方法における上側ウェハ42を第一上側ウェハ421及び第二上側ウェハ422に置き換えるだけでよいので、実施形態1の製造方法とほぼ同じ工数で圧電センサ2を製造できる。
本実施形態2のその他の構成、作用及び効果は、実施形態1のそれらと同様である。
次に、図1、図17及び図18に基づき、実施形態3の圧電センサについて説明する。
図17及び図18は実施形態3の圧電センサの表面を示す平面図である。図17では配線を省略し、図18では配線を記入するとともに電極及び配線以外の符号を省略している。また、実施形態3の圧電センサの外観は図1の圧電センサと同様である。
本実施形態3の圧電センサの特徴を、図1に基づき説明する。駆動腕11a,11bは、互いに同相になるようにx方向に屈曲振動し、このx方向の屈曲振動(速度v)及び駆動腕11a,11bの回転(角速度Ω)に起因するコリオリ力Fcによってz方向に屈曲振動する。検出腕12a,12bは、駆動腕11a,11bよって支持部10を介して付勢されて、互いに同相になるようにz方向に屈曲振動する。検出腕13a,13bも、検出腕12a,12bと同様にz方向に屈曲振動する。
図17及び図18に示すように、本実施形態3の圧電センサ3は、励振電極31a,31b及び検出電極31c,31dの配置が、実施形態1の圧電センサと異なる。
本実施形態3における駆動腕11a,11bの断面は、図4に示す実施形態1における駆動腕11aと同じである。つまり、駆動腕11a,11bには、それぞれ、水晶片21を挟んで対向する平面同士が同極となるように、両側面に励振電極31aが設けられ、表裏面の溝部14aの内側に励振電極31bが設けられる。したがって、駆動腕11a,11bにおいては、それぞれ、両側面に設けられた励振電極31aと溝部14a内に設けられた励振電極31bとが異極同士となる。そして、実施形態1と同様に、励振電極31aと励振電極31bとの間には、交流の電圧Vinが印加される。
本実施形態3における検出腕12a,12b,13a,13bの断面は、図5に示す実施形態1における検出腕12aと同じである。つまり、検出腕12a,12bには、それぞれ、水晶片22を挟んで対向する平面同士が同極となるように、表裏面に検出電極31cが設けられ、両側面に検出電極31dが設けられる。したがって、検出腕12a,12bにおいては、それぞれ、表裏面に設けられた検出電極31cと両側面に設けられた検出電極31dとが異極同士となる。検出腕13a,13bも検出腕12a,12bと同じ構成である。そして、実施形態1と同様に、検出電極31cと検出電極31dとの間からは、交流の電圧Voutが出力される。
本実施形態3の製造方法は、電極及び配線形成用のフォトマスクが異なる点を除き、実施形態1の製造方法と同様である。
次に、図1、図17及び図18に図19を加えて、圧電センサ3の動作について説明する。
駆動腕11a,11bを振動させる場合、パッド電極32a,32bに交流の電圧Vinを印加する。この電圧Vinで生じた電界によって、駆動腕11a,11bに伸縮現象が生じることにより、互いに同相となる屈曲振動モードが得られる。
ここで、図1に示すように、屈曲振動によって±x方向へ速度vで移動する質量mの駆動腕11a,11bが、原点からy軸方向を見てy軸を中心に時計回りに角速度Ωで回転したとする。このとき、図19[A]に示すように、x方向へ速度vで移動する駆動腕11a,11bはz方向のコリオリ力Fc(Fc=−2mΩ×v)を受ける。また、図19[B]に示すように、−x方向へ速度vで移動する駆動腕11a,11bは−z方向のコリオリ力Fcを受ける。したがって、駆動腕11a,11bは、±z方向のコリオリ力を受けてz方向にも互いに同相で屈曲振動する。なお、このときの駆動腕11a,11bの先端は、±y方向から見て楕円を描くようにつまり±x方向かつ±z方向に振動する。
このとき、駆動腕11a,11bの±z方向の振動は、支持部10へ伝わる。この振動に支持部10及び検出腕12a,12b,13a,13bが共振すると、検出腕12a,…もz方向に屈曲振動する。支持部10及び検出腕12a,…が共振するか否かは、駆動腕11a,11bの振動周波数、支持部10及び検出腕12a,…の材質、構造及び寸法、支持部10に対しての検出腕12a,…の取り付け位置などによって決まる。検出腕12a,…は、z方向に屈曲振動するとともに、z方向にX軸を有する水晶片22からなるので、圧電効果による電圧Voutを出力する。これにより、電圧Voutの値から角速度Ωの値を求めることができる。
本実施形態3のその他の構成、作用及び効果は、実施形態1、2のそれらと同様である。
次に、図20に基づき、実施形態1の圧電センサについて補足する。ここでは、駆動腕と検出腕とが同相又は逆相で共振する理由について、詳しく言及する。
図20[A]に示す圧電センサ1では、支持部10の両端が固定端101,105となっており、支持部10と検出腕12a,12bとが接続点102で固定され、支持部10と駆動腕11a,11bとが接続点103で固定され、支持部10と検出腕13a,13bとが接続点104で固定されている。説明を簡潔にするために、支持部10、駆動腕11a,11b、検出腕12a,12b,13a,13bについて、それぞれの長さのみを考慮する。駆動腕11a,11bの長さはどちらもL1、検出腕12a,12b,13a,13bの長さは全てL2とする。固定端101から接続点102までの長さをL01、接続点102から接続点103までの長さをL02、接続点103から接続点104までの長さをL03、接続点103から接続点104までの長さをL04とする。
ここで、図20[B][C]に示すように、駆動腕11a,11bが振動して、支持部10及び検出腕12a,…が共振すると、定常波が発生する。図20[B]は駆動腕11a,11bと検出腕12a,…とが同相で共振する場合を示し、図20[C]は駆動腕11a,11bと検出腕12a,…とが逆相で共振する場合を示す。図20[B][C]では、位相が0[rad]の時の変位を実線で示し、位相がπ[rad]の時の変位を破線で示す。
駆動腕11a,11bが屈曲振動を始めると、駆動腕11a,11bの接続点103ではz軸を中心に時計回り及び反時計回りに交互かつ一定角度で回転(回動)する振動が発生する。この振動に支持部10が共振し、検出腕12a,…が最も大きく屈曲振動を始めるには、図示するように、検出腕12a,…の接続点102,103が支持部10における定常波の節に位置する必要がある。なぜなら、接続点102,104が支持部10における定常波の腹に位置するならば、検出腕12a,…が±y方向に振動するだけであるので、検出腕12a,…には屈曲振動が生じないからである。
駆動腕11a,11b及び検出腕12a,…の先端は自由端であり、支持部10の両端は固定端101,105であるから、図20[B]に示すように、駆動腕11a,11bと検出腕12a,…とが同相で共振する場合、次式が成り立つ。ただし、m,n,n1,n2は自然数、λは支持部10の共振波長、λ1は駆動腕11a,11bの共振波長、λ2は検出腕12a,…の共振波長である。なお、各共振波長は、振動モードや媒質の違いなどによって、必ずしも同じ値にはならない。
L1=(n1−1)λ1+λ1/4
L2=(n2−1)λ2+λ2/4
L02=L03=nλ
L01=L04=mλ/2
また、図20[C]に示すように、駆動腕11a,11bと検出腕12a,…とが逆相で共振する場合、次式が成り立つ。
L1=(n1−1)λ1+λ1/4
L2=(n2−1)λ2+λ2/4
L02=L03=(n−1)λ+λ/2
L01=L04=mλ/2
図示する例では支持部10の両端が固定端101,105となっているが、支持部10の両端を自由端としてもよい。その場合は、支持部10の両端が支持部10における定常波の腹となることにより、
L01=L04=(m−1)λ/2+λ/4
となる。また、支持部10の両端の一方(例えばL01側)を固定端とし他方(すなわちL04側)を自由端としてもよい。その場合は、
L01=mλ/2
L04=(m−1)λ/2+λ/4
となる。
支持部10の両端の少なくとも一方(例えばL04側)を自由端とした場合は、
L04=(m−1)λ/2+λ/4
となることにより、上式にλ/4の項が含まれることから、共振周波数の整数倍(共振波長λの整数分の一)ごとに異なるL04とする必要がある。つまり、L04の部分がフィルタとして機能することにより、ただ一つの共振周波数で圧電センサ1を駆動できるので、圧電センサ1の動作を安定化できる。
一方、支持部10の両端を固定端とした場合は、
L01=L04=mλ/2
となることにより、上式にλ/4の項が含まれないことから、共振周波数の整数倍(共振波長λの整数分の一)によらず同じL01,L04とすることができる。したがって、複数の共振周波数で圧電センサ1を駆動できるので、共振周波数の選択の幅を拡大できる。
以上の知見から、圧電センサ1について次の構成が導かれる。一対の駆動腕11a,11bは、支持部10における定常波の節の位置(例えば接続点102,103,104)であれば、どこに設けてもよい。その数も任意である。同様に、一対の検出腕12a,12bは、支持部10における定常波の節の位置(例えば接続点102,103,104)であれば、どこに設けてもよい。その数も任意である。支持部10の両端は、両方とも固定端又は自由端としてもよく、一方を固定端及び他方を自由端としてもよい。以上、実施形態1の圧電センサ1について説明したが、実施形態2の圧電センサについても同様である。
次に、図21に基づき、実施形態3の圧電センサについて補足する。ここでは、駆動腕と検出腕とが同相又は逆相で共振する理由について、詳しく言及する。
図21[A]に示す圧電センサ3でも、図20[A]に示す圧電センサ1と同様に、L1,L2,L01〜L04が定義される。
ここで、前述したように駆動腕11a,11bが±z方向に振動すると、図21[B][C]に示すように支持部10及び検出腕12a,…が共振して、定常波が発生する。図20[B]は接続点103(駆動腕11a,11b)と接続点102,104(検出腕12a,…)とが同相で共振する場合を示し、図21[C]は接続点103(駆動腕11a,11b)と接続点102,104(検出腕12a,…)とが逆相で共振する場合を示す。図21[B][C]では、位相が0[rad]の時の変位を実線で示し、位相がπ[rad]の時の変位を破線で示す。
駆動腕11a,11bが±z方向に交互に振動し始めると、駆動腕11a,11bの接続点103でも±z方向の振動が発生する。この振動に支持部10が共振し、検出腕12a,…が最も大きく屈曲振動を始めるには、図示するように、検出腕12a,…の接続点102,103が支持部10における定常波の腹に位置する必要がある。なぜなら、接続点102,104が支持部10における定常波の節に位置するならば、検出腕12a,…は±z方向に振動しないからである。
駆動腕11a,11b及び検出腕12a,…の先端は自由端であり、支持部10の両端は固定端101,105であるから、図21[B]に示すように、駆動腕11a,11bと検出腕12a,…とが同相で共振する場合、次式が成り立つ。ただし、m,n,n1,n2は自然数、λは支持部10の共振波長、λ1は駆動腕11a,11bの共振波長、λ2は検出腕12a,…の共振波長である。なお、各共振波長は、振動モードや媒質の違いなどによって、必ずしも同じ値にはならない。
L1=(n1−1)λ1+λ1/4
L2=(n2−1)λ2+λ2/4
L02=L03=nλ
L01=L04=(m−1)λ/2+λ/4
また、図20[C]に示すように、駆動腕11a,11bと検出腕12a,…とが逆相で共振する場合、次式が成り立つ。
L1=(n1−1)λ1+λ1/4
L2=(n2−1)λ2+λ2/4
L02=L03=(n−1)λ+λ/2
L01=L04=(m−1)λ/2+λ/4
図示する例では支持部10の両端が固定端101,105となっているが、支持部10の両端を自由端としてもよい。その場合は、支持部10の両端が支持部10における定常波の腹となることにより、
L01=L04=mλ/2
となる。また、支持部10の両端の一方(例えばL01側)を固定端とし他方(すなわちL04側)を自由端としてもよい。その場合は、
L01=(m−1)λ/2+λ/4
L04=mλ/2
となる。
支持部10の両端の少なくとも一方(例えばL01側)を固定端とした場合は、
L01=(m−1)λ/2+λ/4
となることにより、上式にλ/4の項が含まれることから、共振周波数の整数倍(共振波長λの整数分の一)ごとに異なるL01とする必要がある。つまり、L01の部分がフィルタとして機能することにより、ただ一つの共振周波数で圧電センサ3を駆動できるので、圧電センサ3の動作を安定化できる。
一方、支持部10の両端を自由端とした場合は、
L01=L04=mλ/2
となることにより、上式にλ/4の項が含まれないことから、共振周波数の整数倍(共振波長λの整数分の一)によらず同じL01,L04とすることができる。したがって、複数の共振周波数で圧電センサ3を駆動できるので、共振周波数の選択の幅を拡大できる。
以上の知見から、圧電センサ3について次の構成が導かれる。一対の駆動腕11a,11bは、支持部10における定常波の腹の位置であれば、どこに設けてもよい。その数も任意である。同様に、一対の検出腕12a,12bは、支持部10における定常波の腹の位置であれば、どこに設けてもよい。その数も任意である。支持部10の両端は、両方とも固定端又は自由端としてもよく、一方を固定端及び他方を自由端としてもよい。
以上、上記各実施形態を参照して本発明を説明したが、本発明は上記各実施形態に限定されるものではない。本発明の構成や詳細については、当業者が理解し得るさまざまな変更を加えることができる。また、本発明には、上記各実施形態の構成の一部又は全部を相互に適宜組み合せたものも含まれる。
例えば、各実施形態における検出電極31c,31dに駆動用の電圧Vinを印加すると、検出腕12a,12b,13a,13bが駆動腕として動作し、駆動腕11a,11bが検出腕として動作することにより、励振電極31a,31bから検出用の電圧Voutを出力する圧電センサとなる。このような圧電センサも本発明に含まれる。
つまり、実施形態1、2において検出電極31c,31dに電圧Vinを印加すると、検出腕12a,12bはz方向に互いに逆相で屈曲振動を始める。検出腕13a,13bについても同様である。これに伴い、支持部10に固定されている駆動腕11a,11bも、z方向に互いに逆相で屈曲振動を始める。このとき、駆動腕11a,11bが図1や図11に示す角速度Ωで回転すると、±x方向のコリオリFcが駆動腕11a,11bに加わる。したがって、駆動腕11a,11bは、±x方向のコリオリ力を受けてx方向に互いに逆相で屈曲振動するとともに、x方向にX軸を有する水晶片21からなるので、圧電効果による電圧Voutを出力する。これにより、電圧Voutの値から角速度Ωの値を求めることができる。
実施形態3においても、検出電極31c,31dに電圧Vinを印加すると、検出腕12a,12bはz方向に互いに同相で屈曲振動を始める。検出腕13a,13bについても同様である。これに伴い、支持部10に固定されている駆動腕11a,11bも、z方向に互いに同相で屈曲振動を始める。このとき、駆動腕11a,11bが図1や図11に示す角速度Ωで回転すると、±x方向のコリオリFcが駆動腕11a,11bに加わる。したがって、駆動腕11a,11bは、±x方向のコリオリ力を受けてx方向に互いに同相で屈曲振動するとともに、x方向にX軸を有する水晶片21からなるので、圧電効果による電圧Voutを出力する。これにより、電圧Voutの値から角速度Ωの値を求めることができる。