JP2014202331A - 車両の動力伝達制御装置 - Google Patents
車両の動力伝達制御装置 Download PDFInfo
- Publication number
- JP2014202331A JP2014202331A JP2013081235A JP2013081235A JP2014202331A JP 2014202331 A JP2014202331 A JP 2014202331A JP 2013081235 A JP2013081235 A JP 2013081235A JP 2013081235 A JP2013081235 A JP 2013081235A JP 2014202331 A JP2014202331 A JP 2014202331A
- Authority
- JP
- Japan
- Prior art keywords
- shift
- torque
- speed
- clutch
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
【解決手段】ノンシンクロ段への変速要求があった場合、変速前の変速段の遊転ギヤと対応するスリーブとの係合を解除してニュートラル段を実現した後(t3)、クラッチトルクTcをエンジントルクTeより大きい値T1に維持した状態(クラッチの接合状態)で、Teの調整によって変速機の入力軸の回転速度Niが「同期回転速度」に一致するように調整される(t3〜t4)。Niの同期が維持された状態で(t4以降)、Tcを変速ショックの許容範囲の上限に対応するトルク以下のT2に低減し、TcがT2に維持された状態で、変速後の変速段に対応するスリーブと変速後の変速段の遊転ギヤとを係合させる。
【選択図】図7
Description
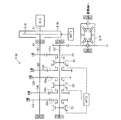
図1は、本発明の実施形態に係る動力伝達制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。この車両は、動力源として内燃機関を備え、且つ、トルクコンバータを備えない変速機とクラッチとを使用した所謂オートメイティッド・マニュアル・トランスミッション(AMT)を備えた車両である。
上述したように、本装置では、T/Mとして、ノンシンクロトランスミッションが搭載されている。従って、T/Mの変速作動においては、変速ショック(変速に起因する車両の前後加速度の急激な変化)を抑制するため、シンクロメッシュ機構に代わる何等かの手段を用いて、T/Mの入力軸A2の回転速度Niを前記「同期回転速度」に一致するように調整し(即ち、Niの同期を行い)、Niの同期が維持された状態にて、変速後の変速段に対応するスリーブを軸方向に移動することによって同スリーブを変速後の変速段の遊転ギヤと係合させる必要がある。
Claims (3)
- 車両の動力源の出力軸から動力が入力される入力軸と、前記車両の駆動輪へ動力を出力する出力軸とを備え、前記入力軸と前記出力軸との間で動力伝達系統が形成され且つ前記出力軸の回転速度に対する前記入力軸の回転速度の割合である減速比が異なる予め定められた複数の走行用変速段と、前記入力軸と前記出力軸との間で動力伝達系統が形成されないニュートラル段とを有する、トルクコンバータを備えていない変速機と、
前記動力源の出力軸と前記変速機の入力軸との間に介装されたクラッチであってクラッチが伝達し得るトルクの最大値であるクラッチトルクを調整可能なクラッチと、
前記クラッチを制御して前記クラッチトルクを調整する第1アクチュエータと、
前記変速機を制御して前記複数の走行用変速段及び前記ニュートラル段のうちから実現される変速段を変更する第2アクチュエータと、
前記車両の走行状態に基づいて、前記動力源の出力軸の駆動トルクである動力源駆動トルク、前記クラッチトルク、前記第1アクチュエータ、及び前記第2アクチュエータを制御する制御手段と、
を備えた車両の動力伝達制御装置であって、
前記変速機は、
それぞれが前記変速機の入力軸又は出力軸に相対回転不能に設けられるとともに、それぞれが前記複数の走行用変速段のそれぞれに対応する複数の固定ギヤと、
それぞれが前記変速機の入力軸又は出力軸に相対回転可能に設けられるとともに、それぞれが前記複数の走行用変速段のそれぞれに対応し且つ対応する変速段の固定ギヤと常時歯合し、それぞれの側面にドグ歯が設けられた複数の遊転ギヤと、
それぞれが前記変速機の入力軸及び出力軸のうち対応する1つ又は複数の前記遊転ギヤが設けられた対応する軸に相対回転不能且つ軸方向に相対移動可能に設けられるとともに、それぞれが前記対応する軸に対して前記対応する遊転ギヤを相対回転不能に固定するために前記対応する遊転ギヤのドグ歯と係合可能なドグ歯を備えた複数のスリーブと、
を備え、
前記複数の走行用変速段のうち少なくとも1つ以上の走行用変速段は、対応する前記遊転ギヤと対応する前記スリーブとの間にシンクロナイザリングを含むシンクロメッシュ機構が設けられていないノンシンクロ段であり、
前記複数のスリーブの全てが何れの遊転ギヤとも係合していない状態において前記ニュートラル段が実現され、前記複数のスリーブのうちの何れか一つが対応する1つの前記遊転ギヤと係合している状態において、前記複数の走行用変速段のうち前記対応する一つの遊転ギヤに対応する変速段が実現され、
前記第2アクチュエータが前記複数のスリーブのそれぞれの軸方向の位置を制御することによって、前記実現される変速段が変更されるように構成され、
前記制御手段は、
前記車両の走行状態に基づいて変速要求が発生した場合に、前記実現される変速段を前記変速要求に基づいて変更するように構成され、
前記制御手段は、
前記実現される変速段を、前記複数の走行用変速段のうちの何れか一つの変速段から前記ノンシンクロ段であるそれ以外の変速段に変更する際、前記クラッチトルクを前記動力源駆動トルクより大きい値に維持しながら、変速前の変速段の前記遊転ギヤと係合している前記スリーブを軸方向に移動することによって前記係合を解除して前記ニュートラル段を実現し、前記ニュートラル段が実現され且つ前記クラッチトルクが前記動力源駆動トルクより大きい値に維持された状態において、前記動力源駆動トルクを調整することによって前記変速機の入力軸の回転速度を、変速後の変速段が実現された状態における前記車両の速度に対応する同期回転速度に一致するように変更し、前記動力源駆動トルクの調整により前記変速機の入力軸の回転速度が前記同期回転速度に維持された状態において、前記クラッチトルクを、前記動力源駆動トルクより大きく且つ変速時のショック抑制の観点から予め定められた上限値以下の範囲内まで低減し、前記クラッチトルクが前記範囲内に維持された状態において、変速後の変速段に対応する前記スリーブを軸方向に移動することによって変速後の変速段の前記遊転ギヤと係合させるように構成された、車両の動力伝達制御装置。 - 請求項1に記載の車両の動力伝達制御装置において、
前記制御手段は、
前記実現される変速段を、前記複数の走行用変速段のうちの何れか一つの変速段から前記ノンシンクロ段であるそれ以外の変速段に変更する際、前記変速要求が発生した時点から、前記動力源駆動トルクの調整により前記変速機の入力軸の回転速度が前記同期回転速度に到達した時点までに亘って、前記クラッチトルクを前記変速要求が発生した時点での値で一定に維持し、その後、前記クラッチトルクを前記範囲内まで低減するように構成された、車両の動力伝達制御装置。 - 請求項1又は請求項2に記載の車両の動力伝達制御装置において、
前記複数の走行用変速段の全てが、前記ノンシンクロ段である、車両の動力伝達制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013081235A JP2014202331A (ja) | 2013-04-09 | 2013-04-09 | 車両の動力伝達制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013081235A JP2014202331A (ja) | 2013-04-09 | 2013-04-09 | 車両の動力伝達制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014202331A true JP2014202331A (ja) | 2014-10-27 |
Family
ID=52352947
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013081235A Pending JP2014202331A (ja) | 2013-04-09 | 2013-04-09 | 車両の動力伝達制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014202331A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104859659A (zh) * | 2015-02-16 | 2015-08-26 | 深圳市沃特玛电池有限公司 | 动力电池汽车专用无离合器变速箱同步换挡方法 |
| JP2016160965A (ja) * | 2015-02-27 | 2016-09-05 | アイシン・エーアイ株式会社 | 車両の動力伝達制御装置 |
| US10100885B2 (en) | 2015-10-02 | 2018-10-16 | Hyundai Motor Company | Launch control method for vehicle |
| JP2020085162A (ja) * | 2018-11-28 | 2020-06-04 | アイシン精機株式会社 | 変速制御装置 |
| WO2023112323A1 (ja) * | 2021-12-17 | 2023-06-22 | ヤマハ発動機株式会社 | 変速制御装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003226163A (ja) * | 2002-02-06 | 2003-08-12 | Mitsubishi Fuso Truck & Bus Corp | 機械式自動変速機の変速制御装置及び変速制御方法 |
| JP2004084912A (ja) * | 2002-08-29 | 2004-03-18 | Toyota Motor Corp | 自動クラッチ付き有段変速機の変速制御装置 |
| JP2012112396A (ja) * | 2010-11-19 | 2012-06-14 | Ikeya Formula Kk | 変速制御システム |
-
2013
- 2013-04-09 JP JP2013081235A patent/JP2014202331A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003226163A (ja) * | 2002-02-06 | 2003-08-12 | Mitsubishi Fuso Truck & Bus Corp | 機械式自動変速機の変速制御装置及び変速制御方法 |
| JP2004084912A (ja) * | 2002-08-29 | 2004-03-18 | Toyota Motor Corp | 自動クラッチ付き有段変速機の変速制御装置 |
| JP2012112396A (ja) * | 2010-11-19 | 2012-06-14 | Ikeya Formula Kk | 変速制御システム |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104859659A (zh) * | 2015-02-16 | 2015-08-26 | 深圳市沃特玛电池有限公司 | 动力电池汽车专用无离合器变速箱同步换挡方法 |
| JP2016160965A (ja) * | 2015-02-27 | 2016-09-05 | アイシン・エーアイ株式会社 | 車両の動力伝達制御装置 |
| US10100885B2 (en) | 2015-10-02 | 2018-10-16 | Hyundai Motor Company | Launch control method for vehicle |
| JP2020085162A (ja) * | 2018-11-28 | 2020-06-04 | アイシン精機株式会社 | 変速制御装置 |
| WO2023112323A1 (ja) * | 2021-12-17 | 2023-06-22 | ヤマハ発動機株式会社 | 変速制御装置 |
| WO2023113028A1 (ja) * | 2021-12-17 | 2023-06-22 | ヤマハ発動機株式会社 | ビークル |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5649360B2 (ja) | 車両の動力伝達制御装置 | |
| JP5942412B2 (ja) | 車両駆動装置 | |
| WO2012008332A1 (ja) | 車両の動力伝達制御装置 | |
| JP5918953B2 (ja) | 車両の動力伝達制御装置 | |
| WO2013008858A1 (ja) | 車両の動力伝達制御装置 | |
| JP2014202331A (ja) | 車両の動力伝達制御装置 | |
| JP6189051B2 (ja) | 自動変速装置 | |
| JP5880779B2 (ja) | 車両の変速制御装置 | |
| JP6239451B2 (ja) | 車両の動力伝達制御装置 | |
| JP6400979B2 (ja) | 車両の動力伝達制御装置 | |
| JP2013024281A (ja) | 車両の動力伝達制御装置 | |
| JP6141683B2 (ja) | 車両の動力伝達制御装置 | |
| JP6555109B2 (ja) | 動力伝達装置の制御装置 | |
| JP6381302B2 (ja) | 車両の動力伝達制御装置 | |
| JP2013053727A (ja) | 車両の動力伝達制御装置 | |
| JP2013245590A (ja) | 車両の変速制御装置 | |
| JP6332311B2 (ja) | 車両用制御装置 | |
| JP5990023B2 (ja) | 車両の動力伝達制御装置 | |
| JP6109581B2 (ja) | 車両の動力伝達制御装置 | |
| JP6457837B2 (ja) | 車両の動力伝達制御装置 | |
| JP2013061050A (ja) | 車両の動力伝達制御装置 | |
| JP2007232046A (ja) | 自動車の制御装置及び制御方法 | |
| WO2014136364A1 (ja) | 車両の変速制御装置 | |
| JP5873277B2 (ja) | 車両の動力伝達制御装置 | |
| JP6017324B2 (ja) | 車両の動力伝達制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160401 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170601 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170919 |