JP2014182227A - 光スキャナー、画像表示装置およびヘッドマウントディスプレイ - Google Patents
光スキャナー、画像表示装置およびヘッドマウントディスプレイ Download PDFInfo
- Publication number
- JP2014182227A JP2014182227A JP2013055730A JP2013055730A JP2014182227A JP 2014182227 A JP2014182227 A JP 2014182227A JP 2013055730 A JP2013055730 A JP 2013055730A JP 2013055730 A JP2013055730 A JP 2013055730A JP 2014182227 A JP2014182227 A JP 2014182227A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- shaft portion
- strain detection
- signal
- detection element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


























Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/085—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by electromagnetic means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Electromagnetism (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Micromachines (AREA)
- Transforming Electric Information Into Light Information (AREA)
Abstract
【解決手段】光スキャナー1は、光反射性を有する光反射部が設けられ、かつ、Y軸周りに揺動可能な可動ミラー部11と、Y軸に交差するX軸周りに揺動可能な枠体部13と、可動ミラー部11と枠体部13とを接続する軸部12a、12bと、固定部15と、枠体部13と固定部15とを接続する軸部14a、14bと、軸部14aの枠体部13側の端部に配置された歪検出素子51と、歪検出素子51の検出信号が入力され、軸部14aの曲げ変形に基づく信号を出力する第1信号処理部と、を備える。
【選択図】図11
Description
例えば、特許文献1に記載の光スキャナーは、枠状の外側フレーム(固定部)と、外側フレームの内側に設けられた枠状の内側フレーム(枠体部)と、内側フレームを外側フレームに対して回動可能に支持する1対の第2の弾性ビーム(第2軸部)と、内側フレームの内側に設けられたミラー部(可動部)と、ミラー部を内側フレームに対して回動可能に支持する1対の第1の弾性ビーム(第1軸部)とを有する。
また、特許文献1に記載の光スキャナーでは、内側フレームと外側フレームとの間の第2の弾性ビームの外側フレーム側の端部にピエゾ抵抗が配置されている。これにより、このピエゾ抵抗の抵抗値変化に基づいて、第2の弾性ビームの捩れ変形による内側フレームおよびミラー部の回動を検知することができる。
一方、特許文献1に記載の光スキャナーでは、ピエゾ抵抗が第2の弾性ビームの外側フレーム側の端部に配置されているため、外側フレームを支持して設置したとき、外部からの熱が外部フレームに伝達され、ピエゾ抵抗が外部からの熱の影響を受けやすい。
そのため、ピエゾ抵抗の温度と、第2の弾性ビームの捩れ変形を生じる主たる部分の温度とが異なってしまい、上述したピエゾ抵抗の温度特性に起因して、ピエゾ抵抗の検出精度の低下を招くという問題があった。
本発明の目的は、歪検出素子に対する外部からの熱の影響を抑制しつつ、歪検出素子を用いて可動部の挙動を検出することができる光スキャナーを提供すること、また、かかる光スキャナーを備える信頼性に優れた画像表示装置およびヘッドマウントディスプレイを提供することにある。
本発明の光スキャナーは、光反射性を有する光反射部が設けられ、かつ、第1の軸周りに揺動可能な可動部と、
前記第1の軸に交差する第2の軸周りに揺動可能な枠体部と、
前記可動部と前記枠体部とを接続する第1軸部と、
固定部と、
前記枠体部と前記固定部とを接続する第2軸部と、
前記第2軸部の前記枠体部側の端部、または、前記可動部、前記枠体部および前記第1軸部のうちのいずれかに配置された第1歪検出素子と、
前記第2軸部の前記枠体部側の端部、または、前記可動部、前記枠体部および前記第1軸部のうちのいずれかに配置された第2歪検出素子と、
前記第1歪検出素子の検出信号が入力され、前記第2軸部の曲げ変形に基づく信号を出力する第1信号処理部と、
前記第2歪検出素子の検出信号が入力され、前記第2軸部の捩れ変形に基づく信号を出力する第2信号処理部と、を備えることを特徴とする。
これにより、可動部に入射した光による熱が第1歪検出素子に与える影響を抑制することができる。また、可動部の第1の軸周りの挙動の検出に用いる歪抵抗素子を第1軸部に設ける必要がないため、第1軸部の設計の自由度を高めることができる。
これにより、第1歪検出素子から出力される信号に含まれる第2軸部の曲げ変形に基づく信号を大きくすることができる。
これにより、検出した挙動に基づいて、可動部の第1の軸周りの挙動を所望の状態となるように制御したり、可動部の第1の軸周りの挙動と他の装置の動作とを同期させたりすることができる。
本発明の光スキャナーでは、オブザーバーを用いて、前記第1信号処理部から出力された信号に基づいて、前記可動部の前記第1の軸周りの挙動を推定することが好ましい。
これにより、可動部の第1の軸周りの揺動が共振状態でなくても、第1信号処理部から出力された信号に基づいて、可動部の第1の軸周りの挙動を検出することができる。
これにより、比較的簡単な構成で、第1信号処理部から出力された信号に基づいて、可動部の第1の軸周りの挙動を高精度に検出することができる。
これにより、可動部に入射した光による熱が第2歪検出素子に与える影響を抑制することができる。また、可動部の第2の軸周りの挙動の検出に用いる歪抵抗素子を第1軸部に設ける必要がないため、第1軸部の設計の自由度を高めることができる。
これにより、検出した挙動に基づいて、可動部の第2の軸周りの挙動を所望の状態となるように制御したり、可動部の第2の軸周りの挙動と他の装置の動作とを同期させたりすることができる。
前記第1の軸に交差する第2の軸周りに揺動可能な枠体部と、
前記可動部と前記枠体部とを接続する第1軸部と、
固定部と、
前記枠体部と前記固定部とを接続する第2軸部と、
前記第2軸部の前記枠体部側の端部に配置され、前記第2軸部の変形を検出する歪検出素子と、
前記歪検出素子の検出信号が入力され、前記第2軸部の曲げ変形に基づく信号を出力する第1信号処理部と、
前記歪検出素子の検出信号が入力され、前記第2軸部の捩れ変形に基づく信号を出力する第2信号処理部と、を備えることを特徴とする。
これにより、歪検出素子から出力される信号に含まれる第2軸部の曲げ変形および捩れ変形のそれぞれに基づく信号を大きくすることができる。
前記歪検出素子は、前記1対の第2軸部のそれぞれに配置されていることが好ましい。
これにより、1対の歪検出素子の検出信号から、第2軸部の曲げ変形に基づく信号と、第2軸部の捩れ変形に基づく信号とをそれぞれ効率的に取り出すことができる。
光を出射する光源と、を備え、
前記光源から出射した光を前記光反射部で反射し、画像を表示することを特徴とする。
これにより、優れた信頼性を有する画像表示装置を提供することができる。
本発明のヘッドマウントディスプレイは、本発明の光スキャナーと、
光を出射する光源と、を備え、
前記光源から出射した光を前記光反射部で反射し、画像を虚像として表示することを特徴とする。
これにより、優れた信頼性を有するヘッドマウントディスプレイを提供することができる。
(光スキャナー)
<第1実施形態>
図1は、本発明の第1実施形態に係る光スキャナーを示す平面図、図2は、図1に示す光スキャナーの断面図(X軸に沿った断面図)、図3は、図1に示す光スキャナーの制御系を示すブロック図である。また、図4は、図1に示す光スキャナーが備える駆動部の電圧印加部を説明するためのブロック図、図5は、図4に示す第1の電圧発生部および第2の電圧発生部での発生電圧の一例を示す図である。
なお、以下では、説明の便宜上、図2中の上側を「上」、下側を「下」と言う。
ここで、可動ミラー部11、1対の軸部12a、12bは、Y軸(第1の軸)周りに揺動(往復回動)する第1の振動系を構成する。また、可動ミラー部11、1対の軸部12a、12b、枠体部13、1対の軸部14a、14bおよび永久磁石21は、X軸(第2の軸)周りに揺動(往復回動)する第2の振動系を構成する。
特に、光スキャナー1では、歪検出素子51が軸部14aの枠体部13側の端部に配置されており、歪検出素子51の検出信号は、軸部14aの曲げ変形に基づく信号を含み、図3に示すように、第1信号処理回路71に入力される。第1信号処理回路71は、軸部14aの曲げ変形に基づく信号を出力する。第1信号処理回路71から出力された信号は、制御部6に入力される。制御部6は、第1信号処理回路71から出力された信号に基づいて、可動ミラー部11のY軸周りの挙動を検出する。このように、歪検出素子51の検出信号に含まれる軸部14aの曲げ変形に基づく信号を用いて、可動ミラー部11のY軸周りの挙動を検出する。
可動ミラー部11は、基部(可動部)111と、スペーサー112を介して基部111に固定された光反射板113とを有する。ここで、基部(可動部)111は固定部15に対して揺動(回動)可能な機能を有するものである。
光反射板113の上面(一方の面)には、光反射性を有する光反射部114が設けられている。
そのため、軸部12aと軸部12bとの間の距離を短くしつつ、光反射板113の板面の面積を大きくすることができる。また、軸部12aと軸部12bとの間の距離を短くすることができることから、枠体部13の小型化を図ることができる。さらに、枠体部13の小型化を図ることができることから、軸部14aと軸部14bとの間の距離を短くすることができる。
このようなことから、光反射板113の板面の面積を大きくしても、光スキャナー1の小型化を図ることができる。
このような光反射板113の下面(他方の面、光反射板113の基部111側の面)には、硬質層115が設けられている。
このような硬質層115の構成材料としては、光反射板113本体の構成材料よりも硬質な材料であれば、特に限定されず、例えば、ダイヤモンド、水晶、サファイヤ、タンタル酸リチウム、ニオブ酸カリウム、カーボンナイトライド膜などを用いることができるが、特に、ダイヤモンドを用いるのが好ましい。
また、硬質層115は、単層で構成されていてもよいし、複数の層の積層体で構成されていてもよい。また、硬質層115は、光反射板113の下面全体に設けられていてもよいし、下面の一部に設けられていてもよい。なお、硬質層115は、必要に応じて設けられるものであり、省略することもできる。
このような硬質層115の形成には、例えば、プラズマCVD、熱CVD、レーザーCVDのような化学蒸着法(CVD)、真空蒸着、スパッタリング、イオンプレーティング等の乾式メッキ法、電解メッキ、浸漬メッキ、無電解メッキ等の湿式メッキ法、溶射、シート状部材の接合等を用いることができる。
また、基部111は、平面視にて、光反射板113の外周に対して内側に位置している。また、基部111の平面視での面積は、基部111がスペーサー112を介して光反射板113を支持することができれば、できるだけ小さいのが好ましい。これにより、光反射板113の板面の面積を大きくしつつ、軸部12aと軸部12bとの間の距離を小さくすることができる。
この枠体部13は、平面視にて、可動ミラー部11の基部111および1対の軸部12a、12bからなる構造体の外形に沿った形状をなしている。これにより、可動ミラー部11、1対の軸部12a、12bで構成された第1の振動系の振動、すなわち、可動ミラー部11のY軸周りの揺動を許容しつつ、枠体部13の小型化を図ることができる。
また、枠体部13は、枠体部13の厚さ方向に軸部12a、12bおよび軸部14a、14bよりも突出したリブ131を有する。このようなリブ131により枠体部13の変形を小さくすることができる。また、このリブ131は、可動ミラー部11が永久磁石21に接触するのを抑制する機能(スペーサーとしての機能)も有する。
なお、枠体部13の形状は、枠状であれば、図示のものに限定されない。
そして、枠体部13は、軸部14a、14bを介して固定部15に支持されている。また、可動ミラー部11の基部111は、軸部12a、12bを介して枠体部13に支持されている。
そして、軸部12a、12b(第1軸部)は、可動ミラー部11をY軸(第1の軸)周りに揺動(回動)可能とするように、可動ミラー部11と枠体部13とを接続している。また、軸部14a、14b(第2軸部)は、枠体部13をY軸に直交するX軸(第2の軸)周りに揺動(回動)可能とするように、枠体部13と固定部15とを接続している。
より具体的に説明すると、軸部12a、12bは、可動ミラー部11の基部111を介して(挟んで)互いに対向するように配置されている。
このように、軸部12a、12bは、可動ミラー部11の基部111を両側から支持している。そして、軸部12a、12bは、それぞれ、可動ミラー部11のY軸周りの揺動に伴って捩れ変形する。
なお、軸部12a、12bの形状は、それぞれ、可動ミラー部11を枠体部13に対してY軸周りに揺動可能に支持するものであれば、前述したものに限定されず、例えば、途中の少なくとも1箇所に、屈曲または湾曲した部分、分岐した部分、幅の異なる部分を有していてもよい。
また、1対の軸部14a、14bは、それぞれ、平面視にてX軸上に沿って配置され、X軸に沿った長手形状(棒状)をなしている。そして、軸部14a、14bは、それぞれ、一方の端部が枠体部13に接続され、他方の端部が固定部15に接続されている。また、軸部14a、14bは、それぞれ、中心軸がX軸に一致するように配置されている。
このように、軸部14a、14bは、枠体部13を両側から支持している。そして、軸部14a、14bは、それぞれ、枠体部13のX軸周りの揺動に伴って捩れ変形する。
このように、可動ミラー部11をY軸周りに揺動可能とするとともに、枠体部13をX軸周りに揺動可能とすることにより、可動ミラー部11(換言すれば光反射板113)を互いに直交するX軸およびY軸の2軸周りに揺動(回動)させることができる。
以上説明したような基部111、軸部12a、12b、枠体部13、軸部14a、14bおよび固定部15は、一体的に形成されている。
そして、基部111、軸部12a、12bおよび軸部14a、14bは、それぞれ、SOI基板の第1のSi層で構成されている。これにより、軸部12a、12bおよび軸部14a、14bの弾性を優れたものとすることができる。また、基部111がY軸周りに回動する際に枠体部13に接触するのを抑制することができる。
また、枠体部13のSiO2層および第2のSi層、すなわち、枠体部13の軸部12a、12bまたは軸部14a、14bよりも厚さ方向に突出した部分は、前述した枠体部13の剛性を高めるリブ131を構成する。
かかる反射防止処理としては、特に限定されないが、例えば、反射防止膜(誘電体多層膜)の形成、粗面化処理、黒色処理等が挙げられる。
なお、前述した基部111、軸部12a、12b、枠体部13、軸部14a、14bおよび固定部15の構成材料および形成方法は、一例であり、本発明は、これに限定されるものではない。例えば、シリコン基板をエッチングすることにより、基部111、軸部12a、12b、枠体部13、軸部14a、14bおよび固定部15を形成してもよい。
このように、SOI基板を用いてスペーサー112および光反射板113を形成することにより、互いに接合されたスペーサー112および光反射板113を簡単かつ高精度に製造することができる。
このようなスペーサー112は、例えば、接着剤、ろう材等の接合材(図示せず)により基部111に接合されている。
前述した枠体部13の下面(光反射板113とは反対側の面)、すなわちリブ131の先端面には、永久磁石21が接合されている。
永久磁石21と枠体部13との接合方法としては、特に限定されないが、例えば、接着剤を用いた接合方法を用いることができる。
永久磁石21は、平面視にて、X軸およびY軸に対して傾斜する方向に磁化されている。
また、永久磁石21は、平面視にて、X軸とY軸との交点を中心として対称となるように設けられている。
これに対し、傾斜角θが前記下限値未満であると、電圧印加部4によりコイル31に印加される電圧の強さなどの諸条件によっては、可動ミラー部11を十分にX軸周りに回動させることができない場合がある。一方、傾斜角θが前記上限値を超えると、諸条件によっては、可動ミラー部11を十分にY軸周りに回動させることができない場合がある。
永久磁石21の直下には、コイル31が設けられている。すなわち、枠体部13の下面に対向するように、コイル31が設けられている。これにより、コイル31から発生する磁界を効率的に永久磁石21に作用させることができる。これにより、光スキャナー1の省電力化および小型化を図ることができる。
このようなコイル31は、電圧印加部4に電気的に接続されている。
そして、電圧印加部4によりコイル31に電圧が印加されることで、コイル31からX軸およびY軸に直交する方向の磁界が発生する。
第1の電圧V1は、正弦波のような波形をなしている。そのため、光スキャナー1は効果的に光を主走査することができる。なお、第1の電圧V1の波形は、これに限定されない。
また、第1周波数(1/T1)は、水平走査に適した周波数であれば、特に限定されないが、10〜40kHzであるのが好ましい。
第2の電圧V2は、鋸波のような波形をなしている。そのため、光スキャナー1は効果的に光を垂直走査(副走査)することができる。なお、第2の電圧V2の波形は、これに限定されない。
このような第2の電圧V2の周波数(第2周波数)は、第1の電圧V1の周波数(第1周波数)よりも小さいことが好ましい。すなわち、周期T2は、周期T1よりも長いことが好ましい。これにより、より確実かつより円滑に、可動ミラー部11をY軸周りに第1周波数で回動させつつ、X軸周りに第2周波数で回動させることができる。
このような第1の電圧発生部41および第2の電圧発生部42は、それぞれ、制御部6に接続され、この制御部6からの信号に基づき駆動する。このような第1の電圧発生部41および第2の電圧発生部42には、電圧重畳部43が接続されている。
電圧重畳部43は、コイル31に電圧を印加するための加算器43aを備えている。加算器43aは、第1の電圧発生部41から第1の電圧V1を受けるとともに、第2の電圧発生部42から第2の電圧V2を受け、これらの電圧を重畳しコイル31に印加するようになっている。
すると、第1の電圧V1によって、永久磁石21の一方の磁極をコイル31に引き付けようとするとともに、永久磁石21の他方の磁極をコイル31から離間させようとする磁界(この磁界を「磁界A1」という)と、永久磁石21の一方の磁極211をコイル31から離間させようとするとともに、永久磁石21の他方の磁極212をコイル31に引き付けようとする磁界(この磁界を「磁界A2」という)とが交互に切り換わる。
また、第1の電圧V1の周波数は、第1の振動系の捩り共振周波数と等しい。そのため、第1の電圧V1によって、効率的に、可動ミラー部11をY軸周りに回動させることができる。すなわち、前述した枠体部13のY軸周りの捩り振動成分を有する振動が小さくても、その振動に伴う可動ミラー部11のY軸周りの回動角を大きくすることができる。
また、第2の電圧V2の周波数は、第1の電圧V1の周波数に比べて極めて低く設定されている。また、第2の振動系の捩り共振周波数は、第1の振動系の捩り共振周波数よりも低く設計されている。そのため、可動ミラー部11が第2の電圧V2の周波数でY軸周りに回動してしまうことを抑制することができる。
このような可動ミラー部11の挙動は、歪検出素子51、52の検出信号に基づいて検出される。
図6は、図1に示す光スキャナーの第1歪検出素子を説明するための図、図7は、図1に示す光スキャナーの第2歪検出素子を説明するための図である。
歪検出素子51(第1歪検出素子)は、軸部14aの枠体部13側の端部に配置され、軸部14aの変形(主に曲げ変形)を検出する。これにより、可動ミラー部11に入射した光による熱が歪検出素子51に与える影響を抑制することができる。また、可動ミラー部11のY軸周りの挙動の検出に用いる歪抵抗素子を軸部12a、12bに設ける必要がないため、軸部12a、12bの設計の自由度を高めることができる。
具体的に説明すると、歪検出素子51は、図6に示すように、ピエゾ抵抗領域511と、ピエゾ抵抗領域511上に配置された1対の端子512、513とを有している。
ピエゾ抵抗領域511は、軸部14a表面に不純物をドーピングすることにより形成されている。より具体的には、軸部14aがp型シリコン単結晶基板を加工することにより形成されている場合、ピエゾ抵抗領域511は、軸部14a表面にリン等の不純物をドーピングすることにより形成されたn型シリコン単結晶(n型抵抗領域)である。一方、軸部14aがn型シリコン単結晶基板を加工することにより形成されている場合、ピエゾ抵抗領域511は、軸部14a表面にボロン等の不純物をドーピングすることにより形成されたp型シリコン単結晶(p型抵抗領域)である。
なお、本実施形態では、ピエゾ抵抗領域511全体が軸部14a上に設けられているが、ピエゾ抵抗領域511は、軸部14aの曲げ変形による引張応力または圧縮応力を受けることができれば、図示の位置に限定されず、例えば、軸部14aと固定部15との境界部を跨るように設けられていてもよい。
このようなピエゾ抵抗領域511上には、軸部14aの長手方向(すなわちX軸方向)に沿った方向に並んで1対の端子512、513が配置されている。
1対の端子512、513は、第1信号処理回路71に電気的に接続されている。
このような歪検出素子51では、軸部14aの曲げ変形に伴ってピエゾ抵抗領域511に引張応力または圧縮応力が生じると、その引張応力または圧縮応力の程度に応じて、ピエゾ抵抗領域511の比抵抗値が変化する。
本実施形態では、ピエゾ抵抗領域511がX軸方向に延びる長手形状をなすとともに1対の端子512、513がピエゾ抵抗領域511上にX軸方向に並んで配置されているので、歪検出素子51から出力される信号に含まれる軸部14aの曲げ変形に基づく信号を大きくすることができる。
このような歪検出素子51の検出信号は、固定部15に設けられた1対の端子81a、81bを介して、第1信号処理回路71(第1信号処理部)に入力される。
第1信号処理回路71における具体的な処理としては、例えば、インピーダンス変換、温度補償、信号増幅、フィルター、ADコンバーター等が挙げられる。
前述したように、歪検出素子51の検出信号は、軸部14aの曲げ変形に基づく信号を含んでいる。そして、第1信号処理回路71は、上述したような処理を必要に応じて行って、軸部14aの曲げ変形に基づく信号を出力する。これにより、第1信号処理回路71から出力された信号に基づいて、可動ミラー部11のY軸周りの挙動を検出することができる。
この抵抗素子711、712、713および歪検出素子51は、ブリッジ回路(ホイートストンブリッジ回路)を構成している。このブリッジ回路は、歪検出素子駆動回路53により電力が供給され、歪検出素子51の抵抗値の変化に応じた信号(電圧)を制御部6へ出力する。
このような抵抗素子711、712、713は、それぞれ、歪検出素子51と同等の温度特性を有していることが好ましい。これにより、歪検出素子51の温度特性によらず、軸部14aの曲げ変形量に応じた信号(電圧)を安定して出力することができる。
このような第1信号処理回路71から出力された信号は、図3に示す制御部6に入力される。
この歪検出素子52は、4端子型のピエゾ抵抗素子である。
具体的に説明すると、歪検出素子52は、図7に示すように、ピエゾ抵抗領域521と、ピエゾ抵抗領域521上に配置された1対の入力端子522、523および1対の出力端子524、525とを有している。
なお、本実施形態では、ピエゾ抵抗領域521全体が軸部14b上に設けられているが、ピエゾ抵抗領域521は、軸部14bの捩れ変形によるせん断応力を受けることができれば、図示の位置に限定されず、例えば、軸部14bと固定部15との境界部を跨るように設けられていてもよい。
このようなピエゾ抵抗領域521上には、軸部14bの長手方向(すなわちX軸方向)に沿った方向に並んで1対の入力端子522、523が配置されているとともに、軸部14bの長手方向に対して垂直な方向(すなわちY軸方向)に沿った方向に並んで1対の出力端子524、525が配置されている。
1対の入力端子522、523は、固定部15に設けられた1対の端子82a、82bを介して、歪検出素子駆動回路53に電気的に接続されている。
このような歪検出素子52では、歪検出素子駆動回路53が1対の入力端子522、523間に定電圧または定電流で電圧を印加する。これにより、ピエゾ抵抗領域521上に電界Eを生じさせる。この電界Eのもと、軸部14bの捩れ変形に伴ってピエゾ抵抗領域521にせん断応力が生じると、そのせん断応力の程度に応じて、ピエゾ抵抗領域521の比抵抗値が変化し、1対の出力端子524、525間の電位差が変化する。この電位差は、軸部14bの捩れ変形量や、可動ミラー部11および枠体部13のX軸周りの揺動角に応じて変化する。したがって、かかる電位差に基づいて、可動ミラー部11のX軸周りの挙動を検知することができる。
このような歪検出素子52の検出信号は、第2信号処理回路72(第2信号処理部)に入力される。
第2信号処理回路72における具体的な処理としては、例えば、インピーダンス変換、温度補償、信号増幅、フィルター、ADコンバーター等が挙げられる。
前述したように、歪検出素子52の検出信号は、軸部14bの捩れ変形に基づく信号を含んでいる。そして、第2信号処理回路72は、上述したような処理を必要に応じて行って、軸部14bの捩れ変形に基づく信号を出力する。これにより、第2信号処理回路72から出力された信号に基づいて、可動ミラー部11のX軸周りの挙動を検出することができる。
制御部6では、第1信号処理回路71から出力された信号に基づいて、可動ミラー部11のY軸周りの挙動を検出する。これにより、検出した挙動に基づいて、可動ミラー部11のY軸周りの挙動を所望の状態となるように制御したり、可動ミラー部11のY軸周りの挙動と他の装置の動作とを同期させたりすることができる。
制御部6では、第2信号処理回路72から出力された信号に基づいて、可動ミラー部11のX軸周りの挙動を検出する。これにより、検出した挙動に基づいて、可動ミラー部11のX軸周りの挙動を所望の状態となるように制御したり、可動ミラー部11のX軸周りの挙動と他の装置の動作とを同期させたりすることができる。
H検出部61は、第1信号処理回路71から出力された信号に基づいて、水平走査の制御に必要な信号として、例えば可動ミラー部11のY軸周りの揺動角に応じた信号を生成する。なお、可動ミラー部11のY軸周りの揺動角の検出方法については、後に詳述する。
V検出部62は、第2信号処理回路72から出力された信号に基づいて、垂直走査の制御に必要な信号として、例えば可動ミラー部11のX軸周りの揺動角に応じた信号を生成する。
H目標値記憶部65には、H目標値として、例えば、水平走査用の駆動信号との位相差、可動ミラー部11のY軸周りの最大揺動角が格納(記憶)されている。
V制御部64は、V目標値生成部66から出力されたV目標値と、V検出部62から出力された信号とに基づいて、垂直走査用の駆動信号を生成する。
V目標値生成部66は、外部から入力された垂直走査方向へのライン情報に基づいて、V目標値として、例えば、可動ミラー部11のX軸周りの揺動角を生成する。
(第1検出方法)
第1検出方法では、オブザーバーを用いて、第1信号処理回路71から出力された信号に基づいて、可動ミラー部11のY軸周りの挙動(本例では揺動角)を推定する。
光スキャナー1は、前述したように、水平走査のための第1の電圧と垂直走査のための第2の電圧を重畳してコイル31に印加することによって、可動ミラー部11をY軸(第1の軸)周りに第1の電圧の周波数で揺動させるとともにX軸(第2の軸)周りに第2の電圧の周波数で揺動させる。
そうすると、光スキャナー1のY軸周りに関する運動方程式は、下記式(1)で表すことができる。

かかるオブザーバーは、オブザーバーゲインをLとし、Xおよびyの推定値の関係は、次のように表される。
以上説明したような第1検出方法によれば、可動ミラー部11のY軸周りの揺動が共振状態でなくても、第1信号処理回路71から出力された信号に基づいて、可動ミラー部11のY軸周りの挙動を検出することができる。
第2検出方法では、可動ミラー部11のY軸周りの揺動に関する共振周波数における振幅と、枠体部13のY軸周りの揺動に関する共振周波数における振幅との比を用いて、第1信号処理回路71から出力された信号に基づいて、可動ミラー部11のY軸周りの挙動(本例では揺動角)を推定する。
前記式(1)において、θhhおよびθvhのラプラス変換をそれぞれXhhおよびXvhとし、初期値をすべて0とすると、下記式(2)が得られる。
具体的には、枠体部13に印加されるY軸周りのトルクと可動ミラー部11および枠体部13のY軸周りの揺動角との比に関する周波数特性は、図8(a)および図9(a)に示すようになる。
なお、図8(a)は、枠体部に印加される第1の軸周りのトルクと可動部および枠体部のY軸周りの揺動角との比に関する周波数特性を示すグラフ、図8(b)は、枠体部に印加される第1の軸周りのトルクと可動部および枠体部の第1の軸周りの揺動との位相差に関する周波数特性を示すグラフである。また、図9(a)は、図8(a)の共振周波数付近を拡大したグラフ、図9(b)は、図8(b)の共振周波数付近を拡大したグラフである。
かかる比が温度変化により変化する場合には、光スキャナー1付近に温度センサーを設置し、その温度センサーによって検知された温度に応じて、当該比を補正すればよい。
以上説明したような第2検出方法によれば、比較的簡単な構成で、第1信号処理回路71から出力された信号に基づいて、可動ミラー部11のY軸周りの挙動を高精度に検出することができる。
次に、本発明の第2実施形態について説明する。
図10は、本発明の第2実施形態に係る光スキャナーを示す平面図、図11は、図10に示す光スキャナーの制御系を示すブロック図である。また、図12は、図10に示す光スキャナーの歪検出素子を説明するための図である。また、図13は、2端子型の歪検出素子の姿勢とシリコンの結晶方位との関係を説明するための図である。また、図14は、ピエゾ抵抗領域にp型シリコンを用いた場合における2端子型の歪検出素子の姿勢(角度α)と引張応力およびせん断応力による抵抗値変化率の絶対値との関係を示すグラフである。また、図15は、ピエゾ抵抗領域にn型シリコンを用いた場合における2端子型の歪検出素子の姿勢(角度α)と引張応力およびせん断応力による抵抗値変化率の絶対値との関係を示すグラフである。また、図16は、2端子型の歪検出素子の姿勢(角度α)と引張応力およびせん断応力による抵抗値変化率の絶対値の比との関係を示すグラフである。
なお、以下の説明では、第2実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図10〜図12において、前述した実施形態と同様の構成については、同一符号を付している。
歪検出素子51A(第1歪検出素子)は、軸部14aの枠体部13側の端部に配置され、軸部14aの変形(曲げ変形および捩れ変形)を検出する。一方、歪検出素子52A(第2歪検出素子)は、軸部14bの枠体部13側の端部に配置され、軸部14bの変形(曲げ変形および捩れ変形)を検出する。
この歪検出素子51Aは、2端子型のピエゾ抵抗素子である。
具体的に説明すると、歪検出素子51Aは、図12に示すように、ピエゾ抵抗領域511Aと、ピエゾ抵抗領域511A上に配置された1対の端子512A、513Aとを有している。
また、ピエゾ抵抗領域511Aは、軸部14aの長手方向(すなわちX軸方向)に対して傾斜した方向に延びる長手形状をなしている。また、ピエゾ抵抗領域511Aは、平面視にて、軸部14aの幅方向での中心を跨って配置されている。
このようなピエゾ抵抗領域511A上には、軸部14aの長手方向(すなわちX軸方向)に対して傾斜した方向に並んで1対の端子512A、513Aが配置されている。
1対の端子512A、513Aは、第1信号処理回路71Aに電気的に接続されている。なお、図12では、図示しないが、1対の端子512A、513Aは、図11に示す第2信号処理回路72Aにも電気的に接続されている。
このような歪検出素子51Aでは、軸部14aの曲げ変形に伴ってピエゾ抵抗領域511Aに引張応力または圧縮応力が生じると、その引張応力または圧縮応力の程度に応じて、ピエゾ抵抗領域511Aの比抵抗値が変化する。
したがって、歪検出素子51Aの検出信号は、軸部14aの曲げ変形および捩れ変形に基づく信号を含んでいる。
このような歪検出素子51Aの検出信号に含まれる軸部14aの曲げ変形に基づく信号と軸部14aの捩れ変形に基づく信号との比は、歪検出素子51Aの角度α(傾斜角度)に応じて変化する。ここで、角度αは、軸部14aの長手方向(すなわちX軸方向)と、1対の端子512A、513Aとが並ぶ方向(1対の端子512、513を最短距離で結ぶ直線の方向)とのなす角度である。
ピエゾ抵抗領域511Aをp型のシリコン単結晶で構成した場合、図14(a)に示すように、1対の端子512A、513A間におけるピエゾ抵抗領域511Aの引張応力に関する抵抗値変化率の絶対値は、角度α(<110>からのオフセット)が大きくなるに従い小さくなる。すなわち、角度αが大きくなるほど、歪検出素子51Aの検出信号に含まれる軸部14aの曲げ変形に基づく信号が小さくなる。
以上のようなことから、軸部14aの長手方向をシリコン単結晶の結晶軸の<110>方向とした場合、ピエゾ抵抗領域511Aをp型のシリコン単結晶で構成することにより、歪検出素子51Aから出力される信号に含まれる軸部14aの曲げ変形および捩れ変形のそれぞれに基づく信号を効率的に大きくすることができる。
第1信号処理回路71Aにおける具体的な処理としては、例えば、インピーダンス変換、温度補償、信号増幅、フィルター、ADコンバーター等が挙げられる。
前述したように、歪検出素子51A、52Aの検出信号は、軸部14a、14bの曲げ変形および捩れ変形に基づく信号を含んでいる。そして、第1信号処理回路71Aは、上述したような処理を必要に応じて行って、歪検出素子51A、52Aの検出信号から軸部14a、14bの捩れ変形に基づく信号を除去し、軸部14a、14bの捩れ変形に基づく信号を出力する。これにより、第1信号処理回路71Aから出力された信号に基づいて、可動ミラー部11のY軸周りの挙動を検出することができる。
この抵抗素子711、712、713および歪検出素子51Aは、ブリッジ回路(ホイートストンブリッジ回路)を構成している。このブリッジ回路は、歪検出素子駆動回路53により電力が供給され、歪検出素子51Aの抵抗値の変化に応じた信号(電圧)を処理部714へ出力する。
例えば、処理部714は、差動増幅回路であり、歪検出素子51Aを含むブリッジ回路からの信号(電圧)と、このブリッジ回路と同様に構成された歪検出素子52Aを含むブリッジ回路からの信号(電圧)との差を増幅する。これにより、これらのブリッジ回路からの信号に含まれる捩れ変形成分を除去するとともに、曲げ変形成分を増幅することができる。
このような第1信号処理回路71Aから出力された信号は、図11に示す制御部6に入力される。
第2信号処理回路72Aにおける具体的な処理としては、例えば、インピーダンス変換、温度補償、信号増幅、フィルター、ADコンバーター等が挙げられる。
前述したように、歪検出素子51A、52Aの検出信号は、軸部14a、14bの曲げ変形および捩れ変形に基づく信号を含んでいる。そして、第2信号処理回路72Aは、上述したような処理を必要に応じて行って、歪検出素子51A、52Aの検出信号から軸部14a、14bの曲げ変形に基づく信号を除去し、軸部14a、14bの捩れ変形に基づく信号を出力する。これにより、第2信号処理回路72Aから出力された信号に基づいて、可動ミラー部11のX軸周りの挙動を検出することができる。
このような第2信号処理回路72Aから出力された信号は、図11に示す制御部6に入力される。
以上説明したような第2実施形態に係る光スキャナー1Aによっても、歪検出素子51A、52Aに対する外部からの熱の影響を抑制しつつ、歪検出素子51A、52Aを用いて可動ミラー部11の挙動を検出することができる。
次に、本発明の第3実施形態について説明する。
図17は、本発明の第3実施形態に係る光スキャナーを示す平面図、図18は、図17に示す光スキャナーの歪検出素子を説明するための図である。また、図19は、ピエゾ抵抗領域にp型シリコンを用いた場合における4端子型の歪検出素子の姿勢(角度α)と引張応力およびせん断応力による抵抗値変化率の絶対値との関係を示すグラフである。また、図20は、ピエゾ抵抗領域にn型シリコンを用いた場合における4端子型の歪検出素子の姿勢(角度α)と引張応力およびせん断応力による抵抗値変化率の絶対値との関係を示すグラフである。また、図21は、4端子型の歪検出素子の姿勢(角度α)と引張応力およびせん断応力による抵抗値変化率の絶対値の比との関係を示すグラフである。
なお、以下の説明では、第3実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図17および図18において、前述した実施形態と同様の構成については、同一符号を付している。
歪検出素子51B(第1歪検出素子)は、軸部14aの枠体部13側の端部に配置され、軸部14aの変形(曲げ変形および捩れ変形)を検出する。一方、歪検出素子52B(第2歪検出素子)は、軸部14bの枠体部13側の端部に配置され、軸部14bの変形(曲げ変形および捩れ変形)を検出する。
この歪検出素子51Bは、4端子型のピエゾ抵抗素子である。
具体的に説明すると、歪検出素子51Bは、図18に示すように、ピエゾ抵抗領域511Bと、ピエゾ抵抗領域511B上に配置された1対の入力端子512B、513Bおよび1対の出力端子514B、515Bとを有している。
本実施形態では、ピエゾ抵抗領域511Bは、平面視にて、四角形をなしている。
なお、本実施形態では、ピエゾ抵抗領域511B全体が軸部14a上に設けられているが、ピエゾ抵抗領域511Bは、軸部14aの曲げ変形による引張応力または圧縮応力を受けるとともに軸部14aの捩れ変形によるせん断応力を受けることができれば、図示の位置に限定されず、例えば、軸部14aと固定部15との境界部を跨るように設けられていてもよい。
このようなピエゾ抵抗領域511B上には、軸部14aの長手方向(すなわちX軸方向)に対して傾斜した方向に並んで1対の入力端子512B、513Bが配置されているとともに、1対の入力端子512B、513Bが並ぶ方向に対して垂直な方向に並んで1対の出力端子514B、515Bが配置されている。
一方、1対の出力端子514B、515Bは、固定部15に設けられた1対の端子84c、84dを介して、第1信号処理回路71Aおよび第2信号処理回路72Aに電気的に接続されている。
また、この電界Eのもと、軸部14aの曲げ変形に伴ってピエゾ抵抗領域511Bに引張応力が生じると、その引張応力の程度に応じて、ピエゾ抵抗領域511Bの比抵抗値が変化し、1対の出力端子514B、515B間の電位差が変化する。
したがって、歪検出素子51Bの検出信号は、軸部14aの曲げ変形および捩れ変形に基づく信号を含んでいる。
このような歪検出素子51Bの検出信号に含まれる軸部14aの曲げ変形に基づく信号と軸部14aの捩れ変形に基づく信号との比は、歪検出素子51Bの角度α(傾斜角度)に応じて変化する。ここで、角度αは、軸部14aの長手方向(すなわちX軸方向)と、1対の入力端子512B、513Bとが並ぶ方向(1対の入力端子512B、513B間を最短距離で結ぶ直線の方向)とのなす角度である。
ピエゾ抵抗領域511Bをp型のシリコン単結晶で構成した場合、図19(a)に示すように、1対の出力端子514B、515B間におけるピエゾ抵抗領域511Bの引張応力に関する抵抗値変化率の絶対値は、角度α(<110>からのオフセット)が大きくなるに従い大きくなる。すなわち、角度αが大きくなるほど、歪検出素子51Bの検出信号に含まれる軸部14aの曲げ変形に基づく信号が大きくなる。
また、角度αは、軸部14a、14bを構成するシリコン単結晶の導電型や結晶軸の方向によって異なり、特に限定されないが、例えば、軸部14a、14bの長手方向をシリコン単結晶の結晶軸の<110>方向とし、かつ、ピエゾ抵抗領域511Bをp型のシリコン単結晶で構成した場合、22°以上42°以下であることが好ましく、38°以上42°以下であることがより好ましい。図21(a)に示すように、角度αを22°以上42°以下とすることにより、上述した比(R1/R2)を約10%から90%までの範囲とすることができる。また、角度αを38°以上42°以下とすることにより、上述した比(R1/R2)を約40%から60%までの範囲とすることができる。
同様に、例えば、第2信号処理回路72Aは、差動増幅回路を含み、上述したような歪検出素子51Bの検出信号と、この歪検出素子51Bと同様に構成された歪検出素子52Bの検出信号との和を増幅する。これにより、これらの歪検出素子51B、52Bからの信号に含まれる曲げ変形成分を除去するとともに、捩れ変形成分を増幅することができる。
以上説明したような第3実施形態に係る光スキャナー1Bによっても、歪検出素子51B、52Bに対する外部からの熱の影響を抑制しつつ、歪検出素子51A、52Aを用いて可動ミラー部11の挙動を検出することができる。
次に、本発明の第4実施形態について説明する。
図22は、本発明の第4実施形態に係る光スキャナーを示す平面図である。
本実施形態に係る光スキャナーは、歪検出素子の設置位置が異なる以外は、前述した第2実施形態にかかる光スキャナーと同様である。
なお、以下の説明では、第4実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図22において、前述した実施形態と同様の構成については、同一符号を付している。
歪検出素子51Cは、枠体部13の軸部14a近傍の部分に配置されている。かかる部分は、軸部14aの変形に伴って応力が生じる。また、歪検出素子52Cは、枠体部13の軸部14bの近傍の部分に配置されている。かかる部分は、軸部14bの変形に伴って応力が生じる。
このような歪検出素子51C、52Cの検出信号は、前述した第2実施形態の歪検出素子51A、52Aの検出信号と同様、軸部14a、14bの捩れ変形に基づく信号および曲げ変形に基づく信号を含む。
以上説明したような第4実施形態に係る光スキャナー1Cによっても、歪検出素子51C、52Cに対する外部からの熱の影響を抑制しつつ、歪検出素子51C、52Cを用いて可動ミラー部11の挙動を検出することができる。
次に、本発明の第5実施形態について説明する。
図23は、本発明の第5実施形態に係る光スキャナーを示す平面図である。
本実施形態に係る光スキャナーは、歪検出素子の設置位置が異なる以外は、前述した第2実施形態にかかる光スキャナーと同様である。
なお、以下の説明では、第5実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図23において、前述した実施形態と同様の構成については、同一符号を付している。
歪検出素子51Dは、基部111の軸部12a近傍の部分に配置されている。かかる部分は、軸部12aの変形に伴って応力が生じる。また、歪検出素子52Dは、基部111の軸部12bの近傍の部分に配置されている。かかる部分は、軸部12bの変形に伴って応力が生じる。
このような歪検出素子51D、52Dの検出信号を用いて枠体部13の挙動を検出するには、前述した第1実施形態で説明した検出方法と逆の関係を用いればよい。
以上説明したような第5実施形態に係る光スキャナー1Dによっても、歪検出素子51D、52Dに対する外部からの熱の影響を抑制しつつ、歪検出素子51D、52Dを用いて可動ミラー部11の挙動を検出することができる。
次に、本発明の第6実施形態について説明する。
図24は、本発明の第6実施形態に係る光スキャナーを示す平面図である。
本実施形態に係る光スキャナーは、歪検出素子の設置位置が異なる以外は、前述した第2実施形態にかかる光スキャナーと同様である。
なお、以下の説明では、第6実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図24において、前述した実施形態と同様の構成については、同一符号を付している。
歪検出素子51Eは、軸部12aの基部111側の端部に配置されている。かかる端部は、軸部12aの変形に伴って応力が生じる。また、歪検出素子52Eは、軸部12bの基部111側の端部に配置されている。かかる端部は、軸部12bの変形に伴って応力が生じる。
このような歪検出素子51E、52Eの検出信号を用いて枠体部13の挙動を検出するには、前述した第1実施形態で説明した検出方法と逆の関係を用いればよい。
以上説明したような第6実施形態に係る光スキャナー1Eによっても、歪検出素子51E、52Eに対する外部からの熱の影響を抑制しつつ、歪検出素子51E、52Eを用いて可動ミラー部11の挙動を検出することができる。
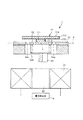
図25は、本発明の画像表示装置の実施形態を模式的に示す図、図26は、図25に示す画像表示装置の制御系を示すブロック図である。なお、図26において、前述した構成と同様の構成については同一符号を付している。
本実施形態では、画像表示装置の一例として、光スキャナー1をイメージング用ディスプレイの光スキャナーとして用いた場合を説明する。なお、スクリーンSの長手方向を「横方向」といい、長手方向に直角な方向を「縦方向」という。また、X軸がスクリーンSの横方向と平行であり、Y軸がスクリーンSの縦方向と平行である。
トリガー生成部73は、第2信号処理回路から出力された信号に基づいて、水平走査方向の描画開始のためのトリガーを生成するための信号を生成する。このトリガー生成部73は、例えば、コンパレーターである。
画像処理部67は、画像信号が入力され、その画像信号に基づいて、描画に必要となる描画信号を生成し、その描画信号を、トリガー生成部73から出力された信号に基づいて、光源駆動信号生成部68へ出力する。また、画像処理部67は、垂直走査方向のライン情報をV目標値生成部66へ出力する。
APC制御部69は、光源装置91の発光強度と画像信号のデータとの対応が環境変化によらず目標値となるように対応付けを補正するための信号を光源駆動信号生成部68へ出力する。
光強度検出回路96は、光源装置91の発光強度を検出するフォトダイオード等の光検出部95からの出力を信号処理に必要な信号に変換する。この光強度検出回路96は、例えば、増幅回路、フィルター、ADコンバーター等を含んで構成されている。
光源装置91は、赤色光を照出する赤色光源装置911と、青色光を照出する青色光源装置912と、緑色光を照出する緑色光源装置913とを備えている。
各ダイクロイックミラー92A、92B、92Cは、赤色光源装置911、青色光源装置912、緑色光源装置913のそれぞれから照出された光を合成する光学素子である。
なお、図25中では、ダイクロイックミラー92A、92B、92Cで合成された光を光スキャナー1によって2次元的に走査した後、その光を固定ミラー93で反射させてからスクリーンSに画像を形成するように構成されているが、固定ミラー93を省略し、光スキャナー1によって2次元的に走査された光を直接スクリーンSに照射してもよい。
<画像表示装置の応用例1>
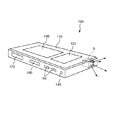
図27は、本発明の画像表示装置の応用例1を示す斜視図である。
図27に示すように、画像表示装置9は、携帯用画像表示装置100に適用することができる。
この携帯用画像表示装置100は、手で把持することができる寸法で形成されたケーシング110と、ケーシング110内に内蔵された画像表示装置9とを有している。この携帯用画像表示装置100により、例えば、スクリーンや、デスク上等の所定の面に、所定の画像を表示することができる。
また、携帯用画像表示装置100は、所定の情報を表示するディスプレイ120と、キーパット130と、オーディオポート140と、コントロールボタン150と、カードスロット160と、AVポート170とを有している。
なお、携帯用画像表示装置100は、通話機能、GSP受信機能等の他の機能を備えていてもよい。
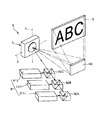
図28は、本発明の画像表示装置の応用例2を示す斜視図である。
図28に示すように、画像表示装置9は、ヘッドアップディスプレイシステム200に適用することができる。
このヘッドアップディスプレイシステム200では、画像表示装置9は、自動車のダッシュボードに、ヘッドアップディスプレイ210を構成するよう搭載されている。このヘッドアップディスプレイ210により、フロントガラス220に、例えば、目的地までの案内表示等の所定の画像を表示することができる。
なお、ヘッドアップディスプレイシステム200は、自動車に限らず、例えば、航空機、船舶等にも適用することができる。
図29は、本発明の画像表示装置の応用例3を示す斜視図である。
図29に示すように、画像表示装置9は、ヘッドマウントディスプレイ300に適用することができる。
すなわち、ヘッドマウントディスプレイ300は、眼鏡310と、眼鏡310に搭載された画像表示装置9とを有している。そして、画像表示装置9により、眼鏡310の本来レンズである部位に設けられた表示部320に、一方の目で視認される所定の画像を表示する。
なお、ヘッドマウントディスプレイ300に、2つ画像表示装置9を設け、両方の目で視認される画像を、2つの表示部に表示するようにしてもよい。
また、前述した実施形態では、光スキャナーまたはアクチュエーターの駆動方式としてムービングマグネット方式を採用した場合を例に説明したが、これに限定されず、ムービングコイル方式を採用した光スキャナーまたはアクチュエーターにも本発明を適用できる。また、本発明は、ムービングマグネット方式やムービングコイル方式のような電磁駆動方式に限定されず、例えば、圧電駆動方式、静電駆動方式等の他の駆動方式にも適用可能である。
また、前述した実施形態では、第2軸部が2つ(1対)設けられている場合を例に説明したが、これに限定されず、例えば、第2軸部が4つ(2対)以上であってもよい。
また、光反射板と基部との間のスペーサーは、ハンダボールであってもよい。この場合、例えば、光反射板および基部のスペーサー側の面にそれぞれ金属膜を形成しておき、これらの金属膜同士をハンダボールを介して接合すればよい。
また、前述した実施形態では、光反射板に光反射部が設けられている場合を例に説明したが、これに限定されず、例えば、光反射板を省略し、基部(可動部)に光反射部を設けてもよい。
また、第1軸部に歪検出素子を配置し、その歪検出素子の検出信号を用いて可動部の第2の軸線周りの挙動を検出する場合、前述した実施形態におけるオブザーバーによる推定と逆の関係となる推定を行えばよい。
Claims (13)
- 光反射性を有する光反射部が設けられ、かつ、第1の軸周りに揺動可能な可動部と、
前記第1の軸に交差する第2の軸周りに揺動可能な枠体部と、
前記可動部と前記枠体部とを接続する第1軸部と、
固定部と、
前記枠体部と前記固定部とを接続する第2軸部と、
前記第2軸部の前記枠体部側の端部、または、前記可動部、前記枠体部および前記第1軸部のうちのいずれかに配置された第1歪検出素子と、
前記第2軸部の前記枠体部側の端部、または、前記可動部、前記枠体部および前記第1軸部のうちのいずれかに配置された第2歪検出素子と、
前記第1歪検出素子の検出信号が入力され、前記第2軸部の曲げ変形に基づく信号を出力する第1信号処理部と、
前記第2歪検出素子の検出信号が入力され、前記第2軸部の捩れ変形に基づく信号を出力する第2信号処理部と、を備えることを特徴とする光スキャナー。 - 前記第1歪検出素子は、前記第2軸部の前記枠体部側の端部に配置され、前記第2軸部の変形を検出する請求項1に記載の光スキャナー。
- 前記第1歪検出素子は、前記第2軸部の長手方向に沿った方向に延びる長手形状をなすピエゾ抵抗領域と、前記ピエゾ抵抗領域上に前記第2軸部の長手方向に沿った方向に並んで配置された1対の端子と、を備える請求項2に記載の光スキャナー。
- 前記第1信号処理部から出力された信号に基づいて、前記可動部の前記第1の軸周りの挙動を検出する請求項1ないし3のいずれか1項に記載の光スキャナー。
- オブザーバーを用いて、前記第1信号処理部から出力された信号に基づいて、前記可動部の前記第1の軸周りの挙動を推定する請求項4に記載の光スキャナー。
- 前記可動部の前記第1の軸周りの揺動に関する共振周波数における振幅と、前記枠体部の前記第1の軸周りの揺動に関する共振周波数における振幅との比を用いて、前記第1信号処理部から出力された信号に基づいて、前記可動部の前記第1の軸周りの挙動を推定する請求項4に記載の光スキャナー。
- 前記第2歪検出素子は、前記第2軸部の前記枠体部側の端部に配置され、前記第2軸部の変形を検出する請求項1ないし6のいずれか1項に記載の光スキャナー。
- 前記第2信号処理部から出力された信号に基づいて、前記可動部の前記第2の軸周りの挙動を検出する請求項7に記載の光スキャナー。
- 光反射性を有する光反射部が設けられ、かつ、第1の軸周りに揺動可能な可動部と、
前記第1の軸に交差する第2の軸周りに揺動可能な枠体部と、
前記可動部と前記枠体部とを接続する第1軸部と、
固定部と、
前記枠体部と前記固定部とを接続する第2軸部と、
前記第2軸部の前記枠体部側の端部に配置され、前記第2軸部の変形を検出する歪検出素子と、
前記歪検出素子の検出信号が入力され、前記第2軸部の曲げ変形に基づく信号を出力する第1信号処理部と、
前記歪検出素子の検出信号が入力され、前記第2軸部の捩れ変形に基づく信号を出力する第2信号処理部と、を備えることを特徴とする光スキャナー。 - 前記歪検出素子は、ピエゾ抵抗領域と、前記ピエゾ抵抗領域上に前記第2軸部の長手方向に対して傾斜した方向に並んで配置された1対の端子と、を備える請求項9に記載の光スキャナー。
- 前記第2軸部は、前記枠体部を挟んで1対設けられており、
前記歪検出素子は、前記1対の第2軸部のそれぞれに配置されている請求項9または10に記載の光スキャナー。 - 請求項1ないし11のいずれか1項に記載の光スキャナーと、
光を出射する光源と、を備え、
前記光源から出射した光を前記光反射部で反射し、画像を表示することを特徴とする画像表示装置。 - 請求項1ないし11のいずれか1項に記載の光スキャナーと、
光を出射する光源と、を備え、
前記光源から出射した光を前記光反射部で反射し、画像を虚像として表示することを特徴とするヘッドマウントディスプレイ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013055730A JP2014182227A (ja) | 2013-03-18 | 2013-03-18 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
| CN201410095268.8A CN104062756A (zh) | 2013-03-18 | 2014-03-14 | 光扫描仪、图像显示装置以及头戴式显示器 |
| EP14159822.7A EP2781949A1 (en) | 2013-03-18 | 2014-03-14 | Optical scanner, image display apparatus, and head mounted display |
| US14/215,607 US20140268266A1 (en) | 2013-03-18 | 2014-03-17 | Optical scanner, image display apparatus, and head mounted display |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013055730A JP2014182227A (ja) | 2013-03-18 | 2013-03-18 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014182227A true JP2014182227A (ja) | 2014-09-29 |
| JP2014182227A5 JP2014182227A5 (ja) | 2016-04-28 |
Family
ID=50389803
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013055730A Pending JP2014182227A (ja) | 2013-03-18 | 2013-03-18 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20140268266A1 (ja) |
| EP (1) | EP2781949A1 (ja) |
| JP (1) | JP2014182227A (ja) |
| CN (1) | CN104062756A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016194514A1 (ja) * | 2015-05-29 | 2016-12-08 | ミツミ電機株式会社 | 光走査装置及びその製造方法、光走査制御装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6565459B2 (ja) * | 2015-08-06 | 2019-08-28 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
| JP6908825B2 (ja) * | 2017-02-14 | 2021-07-28 | ミツミ電機株式会社 | 光走査装置及び光走査方法 |
| CN108776040B (zh) * | 2018-06-11 | 2021-11-26 | 重庆交通大学 | 桥梁安全巡检系统及诊断方法 |
| CN110646298B (zh) * | 2019-09-04 | 2021-12-28 | 金华送变电工程有限公司 | 一种支柱绝缘子弯曲扭转一体试验机 |
| JP2021043323A (ja) * | 2019-09-11 | 2021-03-18 | 浜松ホトニクス株式会社 | 光走査システム及び光走査装置 |
| JP2021043324A (ja) * | 2019-09-11 | 2021-03-18 | 浜松ホトニクス株式会社 | 光走査システムの製造方法、光走査装置の製造方法及びデータ取得方法 |
| JP2021051222A (ja) * | 2019-09-25 | 2021-04-01 | 日本電産株式会社 | 光学素子および光走査装置 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0996552A (ja) * | 1995-09-29 | 1997-04-08 | Omron Corp | センサ装置 |
| JP2002023097A (ja) * | 2000-07-10 | 2002-01-23 | Olympus Optical Co Ltd | ねじり揺動体 |
| JP2003207737A (ja) * | 2002-01-15 | 2003-07-25 | Nissan Motor Co Ltd | 2次元光スキャナ |
| JP2005181576A (ja) * | 2003-12-18 | 2005-07-07 | Nissan Motor Co Ltd | 2次元光スキャナー |
| JP2008168423A (ja) * | 2007-01-15 | 2008-07-24 | Samsung Electro Mech Co Ltd | 回転型memsデバイス |
| DE102007033000A1 (de) * | 2007-07-16 | 2009-01-22 | Robert Bosch Gmbh | Mikromechanisches Bauteil mit einem Positionserkennungsbauteil zur Positionsbestimmung und Amplitudenbestimmung eines schwingfähigen Elements |
| WO2010021215A1 (ja) * | 2008-08-18 | 2010-02-25 | コニカミノルタオプト株式会社 | 画像投影装置 |
| JP2011013270A (ja) * | 2009-06-30 | 2011-01-20 | Nippon Signal Co Ltd:The | プレーナ型アクチュエータ及び光走査装置 |
| JP2011107505A (ja) * | 2009-11-19 | 2011-06-02 | Konica Minolta Opto Inc | 2次元光スキャナ駆動装置 |
| JP2012237788A (ja) * | 2011-05-10 | 2012-12-06 | Konica Minolta Advanced Layers Inc | 光走査装置およびそれを備えた画像投影装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6467345B1 (en) * | 1993-10-18 | 2002-10-22 | Xros, Inc. | Method of operating micromachined members coupled for relative rotation |
| US5488862A (en) * | 1993-10-18 | 1996-02-06 | Armand P. Neukermans | Monolithic silicon rate-gyro with integrated sensors |
| DE19709913C2 (de) * | 1997-03-11 | 1999-05-06 | Cms Mikrosysteme Gmbh Chemnitz | Anordnung zur Messung und Steuerung oder Regelung der Auslenkung von mikromechanischen Spiegelanordnungen |
| US6625341B1 (en) * | 2000-06-12 | 2003-09-23 | Vlad J. Novotny | Optical cross connect switching array system with electrical and optical position sensitive detection |
| JP2002116403A (ja) * | 2000-10-10 | 2002-04-19 | Univ Tokyo | 光スキャナ装置 |
| JP5582518B2 (ja) * | 2006-09-27 | 2014-09-03 | 独立行政法人産業技術総合研究所 | 光走査装置 |
| JP2008170565A (ja) * | 2007-01-10 | 2008-07-24 | Canon Inc | 揺動体装置、及び揺動体装置を用いた画像形成装置 |
| DE102008001465A1 (de) * | 2008-04-30 | 2009-11-05 | Robert Bosch Gmbh | Mikromechanisches Bauteil, Verfahren zum Betreiben eines mikromechanischen Bauteils und Herstellungsverfahren für ein mikromechanisches Bauteil |
| US8559086B2 (en) * | 2010-02-17 | 2013-10-15 | Microvision, Inc. | Piezoresistive sensors for MEMS device having rejection of undesired motion |
| JP5447115B2 (ja) * | 2010-04-08 | 2014-03-19 | セイコーエプソン株式会社 | 画像形成装置 |
| DE102011006337A1 (de) * | 2011-03-29 | 2012-10-04 | Robert Bosch Gmbh | Mikrospigelsystem und dazugehöriges Steuerungsverfahren |
-
2013
- 2013-03-18 JP JP2013055730A patent/JP2014182227A/ja active Pending
-
2014
- 2014-03-14 EP EP14159822.7A patent/EP2781949A1/en not_active Withdrawn
- 2014-03-14 CN CN201410095268.8A patent/CN104062756A/zh active Pending
- 2014-03-17 US US14/215,607 patent/US20140268266A1/en not_active Abandoned
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0996552A (ja) * | 1995-09-29 | 1997-04-08 | Omron Corp | センサ装置 |
| JP2002023097A (ja) * | 2000-07-10 | 2002-01-23 | Olympus Optical Co Ltd | ねじり揺動体 |
| JP2003207737A (ja) * | 2002-01-15 | 2003-07-25 | Nissan Motor Co Ltd | 2次元光スキャナ |
| JP2005181576A (ja) * | 2003-12-18 | 2005-07-07 | Nissan Motor Co Ltd | 2次元光スキャナー |
| JP2008168423A (ja) * | 2007-01-15 | 2008-07-24 | Samsung Electro Mech Co Ltd | 回転型memsデバイス |
| DE102007033000A1 (de) * | 2007-07-16 | 2009-01-22 | Robert Bosch Gmbh | Mikromechanisches Bauteil mit einem Positionserkennungsbauteil zur Positionsbestimmung und Amplitudenbestimmung eines schwingfähigen Elements |
| WO2010021215A1 (ja) * | 2008-08-18 | 2010-02-25 | コニカミノルタオプト株式会社 | 画像投影装置 |
| JP2011013270A (ja) * | 2009-06-30 | 2011-01-20 | Nippon Signal Co Ltd:The | プレーナ型アクチュエータ及び光走査装置 |
| JP2011107505A (ja) * | 2009-11-19 | 2011-06-02 | Konica Minolta Opto Inc | 2次元光スキャナ駆動装置 |
| JP2012237788A (ja) * | 2011-05-10 | 2012-12-06 | Konica Minolta Advanced Layers Inc | 光走査装置およびそれを備えた画像投影装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016194514A1 (ja) * | 2015-05-29 | 2016-12-08 | ミツミ電機株式会社 | 光走査装置及びその製造方法、光走査制御装置 |
| JP2016224211A (ja) * | 2015-05-29 | 2016-12-28 | ミツミ電機株式会社 | 光走査装置及びその製造方法、光走査制御装置 |
| US10473924B2 (en) | 2015-05-29 | 2019-11-12 | Mitsumi Electric Co., Ltd. | Optical scanning device, manufacturing method of optical scanning device, and optical scanning control device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140268266A1 (en) | 2014-09-18 |
| EP2781949A1 (en) | 2014-09-24 |
| CN104062756A (zh) | 2014-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014182225A (ja) | 光スキャナー、アクチュエーター、画像表示装置およびヘッドマウントディスプレイ | |
| JP5935761B2 (ja) | 光学デバイス、光スキャナーおよび画像表示装置 | |
| JP2014182227A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP6111532B2 (ja) | 光学デバイス、光スキャナーおよび画像表示装置 | |
| US9759908B2 (en) | Optical scanner, image display device, head mount display, and heads-up display | |
| JP5942576B2 (ja) | 光学デバイス、光スキャナーおよび画像表示装置 | |
| JP6233010B2 (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| US9448403B2 (en) | Optical scanner, actuator, image display device, and head-mounted display | |
| JP2014056211A (ja) | アクチュエーター、光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP5978855B2 (ja) | アクチュエーター、光スキャナー、画像表示装置、ヘッドマウントディスプレイ | |
| JP6330321B2 (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2017102232A (ja) | 光学デバイス、画像表示装置、およびヘッドマウントディスプレイ | |
| JP2014021424A (ja) | 光学デバイス、画像表示装置および光学デバイスの製造方法 | |
| JP5949345B2 (ja) | アクチュエーター、光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2014191008A (ja) | アクチュエーター、光スキャナーおよび画像表示装置 | |
| JP2014119682A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2017068213A (ja) | 光スキャナー、光スキャナーの製造方法、画像表示装置およびヘッドマウントディスプレイ | |
| JP2014126754A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2016147360A (ja) | アクチュエーター、光スキャナーおよび画像表示装置 | |
| JP2016143020A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2016139017A (ja) | 光スキャナーの製造方法、光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2016139018A (ja) | 光スキャナー、光スキャナーの製造方法、画像表示装置およびヘッドマウントディスプレイ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160314 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160314 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170124 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170718 |