JP6233010B2 - 光スキャナー、画像表示装置およびヘッドマウントディスプレイ - Google Patents
光スキャナー、画像表示装置およびヘッドマウントディスプレイ Download PDFInfo
- Publication number
- JP6233010B2 JP6233010B2 JP2013268714A JP2013268714A JP6233010B2 JP 6233010 B2 JP6233010 B2 JP 6233010B2 JP 2013268714 A JP2013268714 A JP 2013268714A JP 2013268714 A JP2013268714 A JP 2013268714A JP 6233010 B2 JP6233010 B2 JP 6233010B2
- Authority
- JP
- Japan
- Prior art keywords
- light reflecting
- axis
- center
- base
- optical scanner
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B3/00—Devices comprising flexible or deformable elements, e.g. comprising elastic tongues or membranes
- B81B3/0035—Constitution or structural means for controlling the movement of the flexible or deformable elements
- B81B3/004—Angular deflection
- B81B3/0045—Improve properties related to angular swinging, e.g. control resonance frequency
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/085—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by electromagnetic means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/105—Scanning systems with one or more pivoting mirrors or galvano-mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B27/0176—Head mounted characterised by mechanical features
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/16—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with polarised armatures moving in alternate directions by reversal or energisation of a single coil system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2201/00—Specific applications of microelectromechanical systems
- B81B2201/04—Optical MEMS
- B81B2201/042—Micromirrors, not used as optical switches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2203/00—Basic microelectromechanical structures
- B81B2203/05—Type of movement
- B81B2203/058—Rotation out of a plane parallel to the substrate
Description
特許文献1に係る光スキャナーは、フレームと、そのフレームに第1トーションバネを通じて懸架されて第1軸に対して回動可能な外側駆動部と、第2トーションバネを通じて外側駆動部に懸架されて第1軸に直交する第2軸に対して回動可能な内側駆動部と、その内側駆動部の上部に配置されて内側駆動部と共に回動するステージと、を備える。
ところで、このような光スキャナーでは、通常、ミラー面に対して傾斜した方向から光を入射させるが、ミラー面における光のスポット形状は長円形(鶏卵形)をなす。
したがって、特許文献1に記載の光スキャナーでは、ミラー面に光反射に用いない無駄な領域ができてしまったり、ミラー面に入射できずに光の一部が無駄になったりするという問題がある。
本発明の光スキャナーは、基部と、
光を反射する光反射部と、
前記基部と前記光反射部とを接続する接続部と、
前記基部を揺動可能に支持する軸部と、を有し、
前記光反射部は、前記光反射部と前記基部とが並ぶ方向から見た平面視において、前記光反射部の幾何学的中心が前記基部の幾何学的中心と離れた位置となるように設けられ、
前記光反射部は、前記平面視における前記基部の幾何学的中心と前記光反射部の重心との間の距離が、前記平面視における前記光反射部の幾何学的中心と前記基部の幾何学的中心との間の距離よりも小さくなるように調整する重心調整部を備えることを特徴とする。
このような光スキャナーによれば、光反射部の揺動軸まわりの慣性モーメントのバランスを優れたものとし、光反射部の安定した揺動を実現しつつ、光反射部を、光反射に用いない無駄な領域が少ない(光反射の利用効率が高い)平面視形状とすることができる。
光を反射する光反射部と、
前記基部と前記光反射部とを接続する接続部と、
前記基部を囲んで設けられた枠体部と、
前記基部と前記枠体部とを接続し、前記基部を第1軸まわりに揺動可能に支持する第1軸部と、
前記枠体部を前記第1軸と交差する第2軸まわりに揺動可能に支持する第2軸部と、を有し、
前記光反射部は、前記光反射部と前記基部とが並ぶ方向から見た平面視において、前記光反射部の幾何学的中心が前記基部の幾何学的中心と離れた位置となるように設けられ、
前記光反射部は、前記平面視における前記基部の幾何学的中心と前記光反射部の重心との間の距離が、前記平面視における前記光反射部の幾何学的中心と前記基部の幾何学的中心との間の距離よりも小さくなるように調整する重心調整部を備えることを特徴とする。
一般に、光反射部の反射面に対して傾斜した方向から光を入射させるが、特に、このような2つの軸まわりに光反射部を揺動させる2軸型の光スキャナーにおいては、高精度な光走査を実現する上で、平面視で第1軸と第2軸との交点に光の軸が一致するように光を光反射部に入射させなければならない。そのため、光反射部を、光反射に用いない無駄な領域が少ない平面視形状とすると、平面視において、光反射部の幾何学的中心と基部の幾何学的中心とが離れた位置となる。また、このような2軸型の光スキャナーでは、光反射部の揺動軸(第1軸または第2軸)まわりの慣性モーメントのバランスが悪いと、光反射部の揺動角のバランスが悪くなるとともに、第1軸部または第2軸部の不要な曲げ変形が生じる。そのため、このような2軸型の光スキャナーにおいて、光反射部の重心調整(慣性モーメントのバランス調整)を行うことは特に有用である。
この場合、仮に重心調整を行わないと、光反射部の第1軸まわりの慣性モーメントのバランスが悪くなり、光反射部の第1軸まわりの揺動角のバランスが悪くなったり、光反射部の第2軸まわりの揺動に伴って第1軸部の不要な曲げ変形が生じたりするという不具合が生じる。これに対し、本発明では、重心調整部により光反射部の重心を調整することにより、かかる不具合の発生を防止または抑制することができる。
この場合、仮に重心調整部を設けないと、光反射部の第2軸まわりの慣性モーメントのバランスが悪くなり、光反射部の第2軸まわりの揺動角のバランスが悪くなったり、光反射部の第1軸まわりの揺動に伴って第2軸部の不要な曲げ変形が生じたりするという不具合が生じる。これに対し、本発明では、重心調整部により光反射部の重心を調整することにより、かかる不具合の発生を防止または抑制することができる。
これにより、光反射部の反射面に対して傾斜した方向から光を入射させる場合に、光反射部の光反射に用いない無駄な領域を少なくすることができる。
前記重心調整部は、前記光反射板の他方の面に配置された錘を含んでいることが好ましい。
これにより、光反射板の加工が簡単となる。また、光反射部の重心調整の自由度が高くなる。
これにより、錘を構成する材料の比重を、光反射板を構成する材料の比重と異ならせることができる。その結果、光反射部の重心調整の自由度を高めることができる。
本発明の光スキャナーでは、前記錘は、金属材料で構成されていることが好ましい。
一般に光反射板はシリコン材料やガラス材料を用いて構成されるが、金属材料の多くは、シリコン材料やガラス材料よりも比重が大きい。そのため、錘を金属材料で構成することにより、光反射部の重心調整を効率的に行える。
これにより、光反射板の形成と一括して重心調整部を形成することができる。そのため、光スキャナーを効率的に生産することができる。
本発明の画像表示装置は、本発明の光スキャナーを備えることを特徴とする。
これにより、光反射部の揺動軸まわりの慣性モーメントのバランスを優れたものとし、光反射部の安定した揺動を実現しつつ、光反射部を、光反射に用いない無駄な領域が少ない平面視形状とすることができる。
これにより、光反射部の揺動軸まわりの慣性モーメントのバランスを優れたものとし、光反射部の安定した揺動を実現しつつ、光反射部を、光反射に用いない無駄な領域が少ない平面視形状とすることができる。
<第1実施形態>
図1は、本発明の第1実施形態に係る光スキャナーを示す平面図、図2は、図1に示す光スキャナーの断面図(X軸に沿った断面図)である。また、図3は、図1に示す光スキャナーが備える駆動部の電圧印加部を説明するためのブロック図である。また、図4は、図3に示す第1の電圧発生部および第2の電圧発生部での発生電圧の一例を示す図である。
図1および図2に示すように、光スキャナー1は、可動ミラー部11をX軸およびY軸の2軸まわりに揺動させる2軸型の光スキャナーである。この光スキャナー1は、可動ミラー部11と、1対の軸部12a、12b(第1軸部)と、枠体部13と、2対の軸部14a、14b、14c、14d(第2軸部)と、支持部15と、永久磁石21と、コイル31と、磁心32と、電圧印加部4と、を備える。また、図1、2では図示しないが、光スキャナー1は、歪検出素子51(第1歪検出素子)および歪検出素子52(第2歪検出素子)とを備える(図5参照)。
また、永久磁石21、コイル31および電圧印加部4は、前述した第1の振動系および第2の振動系を駆動(すなわち、可動ミラー部11をX軸およびY軸まわりに揺動)させる駆動部を構成する。
可動ミラー部11は、基部(可動部)111と、スペーサー112(接続部)を介して基部111に固定された光反射板113とを有する。
光反射板113の上面(一方の面)には、光反射性を有する光反射面114が設けられている。
このような光反射板113の下面(他方の面、光反射板113の基部111側の面)は、スペーサー112を介して基部111に固定されている。
そして、枠体部13は、軸部14a、14b、14c、14dを介して支持部15に支持されている。また、可動ミラー部11の基部111は、軸部12a、12bを介して枠体部13に支持されている。
なお、枠体部13の形状は、枠状であれば、図示のものに限定されない。
このような軸部12a、12bは、それぞれ、可動ミラー部11のY軸まわりの揺動に伴って捩れ変形する。
このように、可動ミラー部11をY軸まわりに揺動可能とするとともに、枠体部13をX軸まわりに揺動可能とすることにより、可動ミラー部11(換言すれば光反射板113)を互いに直交するX軸およびY軸の2軸まわりに揺動(回動)させることができる。
前述したような基部111、軸部12a、12b、枠体部13、軸部14a、14b、14c、14dおよび支持部15は、一体的に形成されている。
かかる反射防止処理としては、特に限定されないが、例えば、反射防止膜(誘電体多層膜)の形成、粗面化処理、黒色処理等が挙げられる。
なお、前述した基部111、軸部12a、12bおよび軸部14a、14b、14c、14dの構成材料および形成方法は、一例であり、本発明は、これに限定されるものではない。
このように、SOI基板を用いてスペーサー112および光反射板113を形成することにより、互いに接合されたスペーサー112および光反射板113を簡単かつ高精度に製造することができる。
前述した枠体部13の下面(光反射板113とは反対側の面)には、永久磁石21が接合されている。
永久磁石21と枠体部13との接合方法としては、特に限定されないが、例えば、接着剤を用いた接合方法を用いることができる。
永久磁石21は、平面視にて、X軸およびY軸に対して傾斜する方向に磁化されている。
また、永久磁石21は、平面視にて、X軸とY軸との交点を中心として対称となるように設けられている。
X軸に対する永久磁石21の磁化の方向(延在方向)の傾斜角θは、特に限定されないが、30°以上60°以下であるのが好ましく、45°以上60°以下であることがより好ましく、45°であるのがさらに好ましい。このように永久磁石21を設けることで、円滑かつ確実に可動ミラー部11をX軸のまわりに回動させることができる。
本実施形態では、コイル31は、磁心32に巻回されて設けられている。これにより、コイル31で発生した磁界を効率的に永久磁石21に作用させることができる。なお、磁心32は、省略してもよい。
このようなコイル31は、電圧印加部4に電気的に接続されている。そして、電圧印加部4によりコイル31に電圧が印加されることで、コイル31からX軸およびY軸に直交する磁束を有する磁界が発生する。
第1の電圧V1は、正弦波のような波形をなしている。そのため、光スキャナー1は効果的に光を主走査することができる。なお、第1の電圧V1の波形は、これに限定されない。
また、第1周波数(1/T1)は、水平走査に適した周波数であれば、特に限定されないが、10〜40kHzであるのが好ましい。
第2の電圧V2は、鋸波のような波形をなしている。そのため、光スキャナー1は効果的に光を垂直走査(副走査)することができる。なお、第2の電圧V2の波形は、これに限定されない。
このような第2の電圧V2の周波数(第2周波数)は、第1の電圧V1の周波数(第1周波数)よりも小さいことが好ましい。すなわち、周期T2は、周期T1よりも長いことが好ましい。これにより、より確実かつより円滑に、可動ミラー部11をY軸まわりに第1周波数で回動させつつ、X軸まわりに第2周波数で回動させることができる。
電圧重畳部43は、コイル31に電圧を印加するための加算器43aを備えている。加算器43aは、第1の電圧発生部41から第1の電圧V1を受けるとともに、第2の電圧発生部42から第2の電圧V2を受け、これらの電圧を重畳しコイル31に印加するようになっている。
例えば、図4(a)に示すような第1の電圧V1と、図4(b)に示すような第2の電圧V2とを電圧重畳部43にて重畳し、重畳した電圧をコイル31に印加する。
また、第2の電圧V2の周波数は、第1の電圧V1の周波数に比べて極めて低く設定されている。また、第2の振動系の捩り共振周波数は、第1の振動系の捩り共振周波数よりも低く設計されている。そのため、可動ミラー部11が第2の電圧V2の周波数でY軸まわりに回動してしまうことを防止することができる。
このような可動ミラー部11の挙動は、歪検出素子51、52の検出信号に基づいて検出される。
一方、歪検出素子52(第2歪検出素子)は、軸部14dの変形(主に曲げ変形)を検出する。この歪検出素子52の検出信号は、軸部14c、14d全体の捩れ変形に基づく信号を含んでいる。したがって、歪検出素子52の検出信号に基づいて、可動ミラー部11および枠体部13のX軸まわりの挙動を検出することができる。
このような歪検出素子51、52は、図示しない配線を介して、前述した制御部7に電気的に接続されている。そして、制御部7は、歪検出素子51、52の検出信号に基づいて、電圧印加部4の駆動を制御する。
図5は、図1に示す光スキャナーが備える光反射板を説明するための平面図である。また、図6は、図1に示す光スキャナーが備える光反射板を説明するための図であって、図6(a)は、Y軸に沿った断面図、図6(b)は、光反射板の裏面図である。また、図7(a)は、従来の光反射板の光の利用効率を説明するための図、図7(b)は、図1に示す光スキャナーが備える光反射板の光の利用効率を説明するための図である。
この重心調整部115は、平面視における基部111の幾何学的中心Pと光反射部(光反射板113および重心調整部115からなる質量)の重心Gとの間の距離が、平面視における光反射板113の幾何学的中心gと基部111の幾何学的中心Pとの間の距離よりも小さくなるように調整する機能を有する。本実施形態では、平面視において基部111の幾何学的中心Pと光反射部の重心Gが一致している。すなわち、重心調整部115は、平面視における基部111の幾何学的中心Pと光反射部の重心Gとの間の距離がゼロとなるように、光反射部の重心Gを調整している。
このような重心調整部115を光反射板113に設けることにより、光反射板113の揺動軸(X軸およびY軸)まわりの慣性モーメントのバランスを優れたものとし、光反射板113の安定した揺動を実現しつつ、光反射板113を、光反射に用いない無駄な領域が少ない(光反射の利用効率が高い)平面視形状とすることができる。
そこで、図7(b)に示すように、光反射板113を、光反射に用いない無駄な領域が少ない平面視形状とする。ここで、平面視において、光反射板113の幾何学的中心gと基部111の幾何学的中心Pとが離れた位置となる(図6(b)参照)。
このような2軸型の光スキャナー1では、仮に光反射板113の揺動軸(X軸またはY軸)まわりの慣性モーメントのバランスが悪いと、光反射板113の揺動角のバランスが悪くなるとともに、軸部12a、12bまたは軸部14a、14b、14c、14dの不要な曲げ変形が生じる。
このようなことから、2軸型の光スキャナー1において、光反射部の重心調整を行うことは特に有用である。すなわち、重心調整部115により光反射部の重心Gを調整することにより、前述したような不具合の発生を防止または抑制することができる。
また、重心調整部115の構成材料としては、特に限定されず、例えば、金属材料、ガラス材料、シリコン材料、樹脂材料等を用いることができるが、光反射板113と異なる材料を用いることが好ましい。重心調整部115が光反射板113と異なる材料で構成されていることにより、重心調整部を構成する材料の比重を、光反射板113を構成する材料の比重と異ならせることができる。その結果、光反射部の重心調整の自由度を高めることができる。
以上説明したような光スキャナー1によれば、重心調整部115を光反射板113に設けることにより、光反射部の揺動軸まわりの慣性モーメントのバランスを優れたものとし、光反射板113の安定した揺動を実現しつつ、光反射板113を光反射の利用効率が高い平面視形状とすることができる。
次に、本発明の第2実施形態について説明する。
図8は、本発明の第2実施形態に係る光スキャナーが備える光反射板を説明するための図であって、図8(a)は、Y軸に沿った断面図、図8(b)は、光反射板の裏面図である。
本実施形態は、重心調整部および光反射板の構成が異なる以外は、前述した第1実施形態と同様である。
この光反射板113Aは、厚さが異なる複数の部分として、薄肉部1131と、薄肉部1131よりも厚い厚肉部1132とを有している。薄肉部1131は、平面視でX軸に対して光反射板113Aの幾何学的中心g側に設けられ、厚肉部1132は、平面視でX軸に対して光反射板113Aの幾何学的中心gとは反対側に設けられている。このように薄肉部1131および厚肉部1132を光反射板113Aに設けることによって、光反射部の重心Gを調整している。ここで、厚肉部1132は、光反射部の重心Gを調整する重心調整部115Aを構成している。このような重心調整部115Aは、光反射板113Aの形成と一括して形成することができる。そのため、光スキャナーを効率的に生産することができる。なお、薄肉部1131が「重心調整部」を構成しているともいえるし、薄肉部1131および厚肉部1132が「重心調整部」を構成しているともいえる。
以上説明したような第2実施形態によっても、光反射部の揺動軸まわりの慣性モーメントのバランスを優れたものとし、光反射部の安定した揺動を実現しつつ、光反射部を光反射の利用効率が高い平面視形状とすることができる。
次に、本発明の第3実施形態について説明する。
図9は、本発明の第3実施形態に係る光スキャナーが備える光反射板を説明するための図であって、図9(a)は、Y軸に沿った断面図、図9(b)は、光反射板の裏面図である。
本実施形態は、重心調整部の形成位置が異なる以外は、前述した第1実施形態と同様である。
この重心調整部115Bは、光反射板113のX軸に対して幾何学的中心gとは反対側の端部に設けられている。光反射部の揺動軸まわりの慣性モーメントは、揺動軸からの距離も二乗に比例するため、このような光反射板113の端部に重心調整部115Bを設けることにより、光反射部の重心調整を効率的に行え、重心調整部115Bを構成する錘を小さくすることができる。
以上説明したような第3実施形態によっても、光反射部の揺動軸まわりの慣性モーメントのバランスを優れたものとし、光反射部の安定した揺動を実現しつつ、光反射部を光反射の利用効率が高い平面視形状とすることができる。
次に、本発明の第4実施形態について説明する。
図10は、本発明の第4実施形態に係る光スキャナーが備える光反射板を説明するための平面図である。
以下、第4実施形態について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。なお、図10において、前述した実施形態と同様の構成については、同一符号を付している。
本実施形態は、光反射板の取付向きが異なる以外は、前述した第1実施形態と同様である。
この場合、仮に重心調整部を設けないと、光反射部のY軸まわりの慣性モーメントのバランスが悪くなり、光反射部のY軸まわりの揺動角のバランスが悪くなったり、光反射部のX軸まわりの揺動に伴って軸部12a、12bの不要な曲げ変形が生じたりするという不具合が生じる。
以上説明したような第4実施形態によっても、光反射部の揺動軸まわりの慣性モーメントのバランスを優れたものとし、光反射部の安定した揺動を実現しつつ、光反射部を光反射の利用効率が高い平面視形状とすることができる。
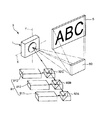
図11は、本発明の画像表示装置の実施形態を模式的に示す図である。
本実施形態では、画像表示装置の一例として、光スキャナー1をイメージング用ディスプレイの光スキャナーとして用いた場合を説明する。なお、スクリーンSの長手方向を「横方向」といい、長手方向に直角な方向を「縦方向」という。また、X軸がスクリーンSの横方向と平行であり、Y軸がスクリーンSの縦方向と平行である。
光源装置91は、赤色光を照出する赤色光源装置911と、青色光を照出する青色光源装置912と、緑色光を照出する緑色光源装置913とを備えている。
このような画像表示装置9は、図示しないホストコンピューターからの画像情報に基づいて、光源装置91(赤色光源装置911、青色光源装置912、緑色光源装置913)から照出された光をダイクロイックミラー92A、92B、92Cでそれぞれ合成し、この合成された光が光スキャナー1によって2次元走査され、スクリーンS上でカラー画像を形成するように構成されている。
なお、図11中では、ダイクロイックミラー92A、92B、92Cで合成された光を光スキャナー1によって2次元的に走査した後、その光を固定ミラー93で反射させてからスクリーンSに画像を形成するように構成されているが、固定ミラー93を省略し、光スキャナー1によって2次元的に走査された光を直接スクリーンSに照射してもよい。
このような画像表示装置9によれば、前述したような光スキャナー1を備えているので、小型化を図りつつ、立ち上がり時間を短くすることができる。
<画像表示装置の応用例1>
図12は、本発明の画像表示装置の応用例1を示す斜視図である。
図12に示すように、画像表示装置9は、携帯用画像表示装置100に適用することができる。
また、携帯用画像表示装置100は、所定の情報を表示するディスプレイ120と、キーパット130と、オーディオポート140と、コントロールボタン150と、カードスロット160と、AVポート170とを有している。
なお、携帯用画像表示装置100は、通話機能、GSP受信機能等の他の機能を備えていてもよい。
図13は、本発明の画像表示装置の応用例2を示す斜視図である。
図13に示すように、画像表示装置9は、ヘッドアップディスプレイシステム200に適用することができる。
このヘッドアップディスプレイシステム200では、画像表示装置9は、自動車のダッシュボードに、ヘッドアップディスプレイ210を構成するよう搭載されている。このヘッドアップディスプレイ210により、フロントガラス220に、例えば、目的地までの案内表示等の所定の画像を表示することができる。
なお、ヘッドアップディスプレイシステム200は、自動車に限らず、例えば、航空機、船舶等にも適用することができる。
図14は、本発明の画像表示装置の応用例3を示す斜視図である。
図14に示すように、画像表示装置9は、ヘッドマウントディスプレイ300に適用することができる。
すなわち、ヘッドマウントディスプレイ300は、眼鏡310と、眼鏡310に搭載された画像表示装置9とを有している。そして、画像表示装置9により、眼鏡310の本来レンズである部位に設けられた表示部320に、一方の目で視認される所定の画像を表示する。
なお、ヘッドマウントディスプレイ300に、2つ画像表示装置9を設け、両方の目で視認される画像を、2つの表示部に表示するようにしてもよい。
また、前述した実施形態では、第1軸部が2つ(1対)設けられている場合を例に説明したが、これに限定されず、例えば、第1軸部が4つ(2対)以上設けられていてもよい。
また、前述した実施形態では、平面視にて光反射板が第1軸部の一部を覆う場合を例に説明したが、光反射板の大きさは、前述した実施形態に限定されず、例えば、枠体部や第2軸部を覆うように形成されていてもよい。
また、光反射板と基部との間のスペーサーは、ハンダボールであってもよい。この場合、例えば、光反射板および基部のスペーサー側の面にそれぞれ金属膜を形成しておき、これらの金属膜同士をハンダボールを介して接合すればよい。
また、前述した実施形態では、光スキャナーの駆動方式としてムービングマグネット方式を用いた場合を例に説明したが、本発明は、これに限定されず、例えば、ムービングコイル方式、圧電駆動方式、静電駆動方式等を用いることができる。
Claims (11)
- 基部と、
光を反射する光反射部と、
前記基部と前記光反射部とを接続する接続部と、
前記基部を揺動可能に支持する軸部と、を有し、
前記光反射部は、前記光反射部と前記基部とが並ぶ方向から見た平面視において、前記光反射部の幾何学的中心が前記基部の幾何学的中心と離れた位置となるように設けられ、
前記光反射部は、前記平面視における前記基部の幾何学的中心と前記光反射部の重心との間の距離が、前記平面視における前記光反射部の幾何学的中心と前記基部の幾何学的中心との間の距離よりも小さくなるように調整する重心調整部を備えることを特徴とする光スキャナー。 - 基部と、
光を反射する光反射部と、
前記基部と前記光反射部とを接続する接続部と、
前記基部を囲んで設けられた枠体部と、
前記基部と前記枠体部とを接続し、前記基部を第1軸まわりに揺動可能に支持する第1軸部と、
前記枠体部を前記第1軸と交差する第2軸まわりに揺動可能に支持する第2軸部と、を有し、
前記光反射部は、前記光反射部と前記基部とが並ぶ方向から見た平面視において、前記光反射部の幾何学的中心が前記基部の幾何学的中心と離れた位置となるように設けられ、
前記光反射部は、前記平面視における前記基部の幾何学的中心と前記光反射部の重心との間の距離が、前記平面視における前記光反射部の幾何学的中心と前記基部の幾何学的中心との間の距離よりも小さくなるように調整する重心調整部を備えることを特徴とする光スキャナー。 - 前記平面視において、前記光反射部の幾何学的中心が前記第1軸に対してずれている請求項2に記載の光スキャナー。
- 前記平面視において、前記光反射部の幾何学的中心が前記第2軸に対してずれている請求項2に記載の光スキャナー。
- 前記光反射部は、前記平面視において、前記光反射部の幾何学的中心と前記基部の幾何学的中心とが並ぶ方向に沿った長円形または鶏卵形をなしている請求項1ないし4のいずれか1項に記載の光スキャナー。
- 前記光反射部は、一方の面が光反射性を有する光反射板を備えており、
前記重心調整部は、前記光反射板の他方の面に配置された錘を含んでいる請求項1ないし5のいずれか1項に記載の光スキャナー。 - 前記錘は、前記光反射板と異なる材料で構成されている請求項6に記載の光スキャナー。
- 前記錘は、金属材料で構成されている請求項7に記載の光スキャナー。
- 前記重心調整部は、前記光反射板に厚さが異なる複数の部分を設けることによって構成されている請求項6ないし8のいずれか1項に記載の光スキャナー。
- 請求項1ないし9のいずれか1項に記載の光スキャナーを備えることを特徴とする画像表示装置。
- 請求項1ないし9のいずれか1項に記載の光スキャナーを備えることを特徴とするヘッドマウントディスプレイ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013268714A JP6233010B2 (ja) | 2013-12-26 | 2013-12-26 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
| US14/582,403 US9256067B2 (en) | 2013-12-26 | 2014-12-24 | Optical scanner, image display apparatus, and head-mount display |
| CN201410815278.4A CN104749771B (zh) | 2013-12-26 | 2014-12-24 | 光扫描仪、图像显示装置以及头戴式显示器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013268714A JP6233010B2 (ja) | 2013-12-26 | 2013-12-26 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015125219A JP2015125219A (ja) | 2015-07-06 |
| JP6233010B2 true JP6233010B2 (ja) | 2017-11-22 |
Family
ID=53481480
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013268714A Active JP6233010B2 (ja) | 2013-12-26 | 2013-12-26 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9256067B2 (ja) |
| JP (1) | JP6233010B2 (ja) |
| CN (1) | CN104749771B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6330321B2 (ja) | 2013-12-26 | 2018-05-30 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
| JP6233010B2 (ja) | 2013-12-26 | 2017-11-22 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
| KR102273981B1 (ko) * | 2017-04-12 | 2021-07-06 | 미쓰비시덴키 가부시키가이샤 | 갈바노 미러, 갈바노 미러를 이용한 갈바노 스캐너, 갈바노 미러를 이용한 레이저 가공기 및 갈바노 미러의 제조 방법 |
| JP6585147B2 (ja) * | 2017-12-01 | 2019-10-02 | 浜松ホトニクス株式会社 | アクチュエータ装置 |
| CN109186858B (zh) * | 2018-09-10 | 2020-09-01 | 广州汽车集团股份有限公司 | 一种重心测量装置及方法 |
| GB2582965B (en) * | 2019-04-11 | 2021-09-15 | Dualitas Ltd | A diffuser assembly |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07181414A (ja) | 1993-12-22 | 1995-07-21 | Omron Corp | 光スキャナ |
| JP3129219B2 (ja) | 1997-01-14 | 2001-01-29 | 日本電気株式会社 | 光スキャナ |
| JP2006010715A (ja) * | 2004-05-21 | 2006-01-12 | Sumitomo Precision Prod Co Ltd | Memsミラースキャナ |
| US7557972B2 (en) * | 2006-06-07 | 2009-07-07 | Canon Kabushiki Kaisha | Oscillator device, optical deflector and optical instrument using the same |
| KR101345288B1 (ko) * | 2007-09-21 | 2013-12-27 | 삼성전자주식회사 | 2축 구동 전자기 스캐너 |
| TWI418850B (zh) * | 2007-11-09 | 2013-12-11 | 尼康股份有限公司 | 微致動器、光學設備、顯示裝置、曝光裝置及設備製造方法 |
| EP2280906A4 (en) * | 2008-04-29 | 2013-10-23 | Micralyne Inc | ELECTROMECHANICAL MICROSYSTEM DEVICE (MEMS) HAVING INDEPENDENT ROTATION IN TWO AXIS OF ROTATION |
| JP5402124B2 (ja) * | 2009-03-18 | 2014-01-29 | セイコーエプソン株式会社 | 光学デバイス、光スキャナー及び画像形成装置 |
| KR101287267B1 (ko) * | 2009-05-11 | 2013-07-17 | 파나소닉 주식회사 | 광학 반사 소자 |
| JP5659672B2 (ja) | 2010-10-06 | 2015-01-28 | セイコーエプソン株式会社 | 光スキャナー、ミラーチップ、光スキャナーの製造方法、および画像形成装置 |
| TWI408413B (zh) * | 2011-02-25 | 2013-09-11 | Ind Tech Res Inst | 二維掃描反射裝置 |
| JP6111532B2 (ja) | 2012-05-11 | 2017-04-12 | セイコーエプソン株式会社 | 光学デバイス、光スキャナーおよび画像表示装置 |
| JP5942576B2 (ja) * | 2012-05-11 | 2016-06-29 | セイコーエプソン株式会社 | 光学デバイス、光スキャナーおよび画像表示装置 |
| DE102012208117B4 (de) * | 2012-05-15 | 2023-10-05 | Robert Bosch Gmbh | Mikromechanisches Bauteil |
| JP6233010B2 (ja) | 2013-12-26 | 2017-11-22 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
| JP6330321B2 (ja) | 2013-12-26 | 2018-05-30 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
-
2013
- 2013-12-26 JP JP2013268714A patent/JP6233010B2/ja active Active
-
2014
- 2014-12-24 US US14/582,403 patent/US9256067B2/en not_active Expired - Fee Related
- 2014-12-24 CN CN201410815278.4A patent/CN104749771B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015125219A (ja) | 2015-07-06 |
| CN104749771B (zh) | 2018-08-28 |
| US20150185470A1 (en) | 2015-07-02 |
| CN104749771A (zh) | 2015-07-01 |
| US9256067B2 (en) | 2016-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5935761B2 (ja) | 光学デバイス、光スキャナーおよび画像表示装置 | |
| JP6056179B2 (ja) | 光スキャナーおよび画像形成装置 | |
| JP6233010B2 (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| US9759908B2 (en) | Optical scanner, image display device, head mount display, and heads-up display | |
| JP5942576B2 (ja) | 光学デバイス、光スキャナーおよび画像表示装置 | |
| JP6111532B2 (ja) | 光学デバイス、光スキャナーおよび画像表示装置 | |
| JP2014182225A (ja) | 光スキャナー、アクチュエーター、画像表示装置およびヘッドマウントディスプレイ | |
| JP2015087442A (ja) | 光スキャナー、画像表示装置、ヘッドマウントディスプレイおよびヘッドアップディスプレイ | |
| JP2014182227A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP6330321B2 (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP5978855B2 (ja) | アクチュエーター、光スキャナー、画像表示装置、ヘッドマウントディスプレイ | |
| JP2014056211A (ja) | アクチュエーター、光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2014182226A (ja) | 光スキャナー、アクチュエーター、画像表示装置およびヘッドマウントディスプレイ | |
| JP2014021424A (ja) | 光学デバイス、画像表示装置および光学デバイスの製造方法 | |
| JP5949345B2 (ja) | アクチュエーター、光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2008228436A (ja) | アクチュエータ、光スキャナおよび画像形成装置 | |
| JP2017102232A (ja) | 光学デバイス、画像表示装置、およびヘッドマウントディスプレイ | |
| JP5991001B2 (ja) | 光学デバイス、光スキャナーおよび画像表示装置 | |
| JP2014191008A (ja) | アクチュエーター、光スキャナーおよび画像表示装置 | |
| JP2014119682A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2014191009A (ja) | アクチュエーター、光スキャナーおよび画像表示装置 | |
| JP2014126754A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP7035305B2 (ja) | 光スキャナー、画像表示装置、ヘッドマウントディスプレイおよびヘッドアップディスプレイ | |
| JP2016143020A (ja) | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ | |
| JP2016147360A (ja) | アクチュエーター、光スキャナーおよび画像表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160617 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160627 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171009 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6233010 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |