JP2014172397A - チェーン張設装置を備えた手で操縦される作業機 - Google Patents
チェーン張設装置を備えた手で操縦される作業機 Download PDFInfo
- Publication number
- JP2014172397A JP2014172397A JP2014041497A JP2014041497A JP2014172397A JP 2014172397 A JP2014172397 A JP 2014172397A JP 2014041497 A JP2014041497 A JP 2014041497A JP 2014041497 A JP2014041497 A JP 2014041497A JP 2014172397 A JP2014172397 A JP 2014172397A
- Authority
- JP
- Japan
- Prior art keywords
- tension spring
- fixing
- guide rail
- working machine
- operating device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B27—WORKING OR PRESERVING WOOD OR SIMILAR MATERIAL; NAILING OR STAPLING MACHINES IN GENERAL
- B27B—SAWS FOR WOOD OR SIMILAR MATERIAL; COMPONENTS OR ACCESSORIES THEREFOR
- B27B17/00—Chain saws; Equipment therefor
- B27B17/14—Arrangements for stretching the chain saw
Abstract
【課題】チェーンの張設と交換を容易にさせる、チェーン張設装置を備えた手で操縦される作業機を提供する。
【解決手段】チェーン(9)として形成された工具が周回するように配置されているガイドレール(8)を備えた手で操縦される作業機であって、ケーシング(2)と、前記ガイドレール(8)を前記ケーシング(2)に固定するための固定装置(12)とが設けられ、前記固定装置(12)が、前記ガイドレール(8)を固定方向(76)に固定するために操作される操作装置(19)を有し、前記チェーン(9)のための張設装置(13)が設けられ、該張設装置(13)が、前記固定装置(12)を解除した時に前記チェーン(9)の張設方向(15)に前記ガイドレール(8)に対し力を作用させる引張りばね(14)を含んでいる前記作業機。前記引張りばね(14)は、前記操作装置(19)と作用結合し、前記操作装置(19)を前記固定方向(76)に操作した時に緊張状態になる。
【選択図】図4
【解決手段】チェーン(9)として形成された工具が周回するように配置されているガイドレール(8)を備えた手で操縦される作業機であって、ケーシング(2)と、前記ガイドレール(8)を前記ケーシング(2)に固定するための固定装置(12)とが設けられ、前記固定装置(12)が、前記ガイドレール(8)を固定方向(76)に固定するために操作される操作装置(19)を有し、前記チェーン(9)のための張設装置(13)が設けられ、該張設装置(13)が、前記固定装置(12)を解除した時に前記チェーン(9)の張設方向(15)に前記ガイドレール(8)に対し力を作用させる引張りばね(14)を含んでいる前記作業機。前記引張りばね(14)は、前記操作装置(19)と作用結合し、前記操作装置(19)を前記固定方向(76)に操作した時に緊張状態になる。
【選択図】図4
Description
本発明は、請求項1の上位概念に記載の、チェーン張設装置を備えた手で操縦される作業機に関するものである。
特許文献1から、パワーソーのチェーンを自動張設するための装置が知られている。この装置はコイルばねを有し、該コイルばねの一端はケーシングで支持され、第2の端部は調整カムで支持されている。チェーンを交換するには、ソーチェーンを弛緩させるために別個のロックカムを操作しなければならない。
特許文献2は、スプロケットホイールカバーを取り外したときに引張りばねを緊張保持するロック装置を設けたチェーン張設装置を開示している。
本発明の課題は、チェーンの張設と交換を容易にさせる、チェーン張設装置を備えた手で操縦される作業機を提供することである。
この課題は、請求項1の構成を備えた手で操縦される作業機によって解決される。
本発明によれば、操作装置を固定方向に操作した時に引張りばねが引張られる。操作装置の固定方向とは、ガイドレールを固定するために操作装置が操作される方向である。従って、固定装置がガイドレールを固定した時に引張りばねは最大に引張られている。チェーンは、ガイドレールを固定した時に、すなわち操作装置を固定方向に操作した時に張設される。たとえばチェーンまたはガイドレールの交換のために固定装置を解除すると、引張りばねが少なくとも部分的に弛緩するので有利である。これにより、ガイドレールの交換の際に引張りばねとガイドレールとの間の作用結合を中断させ且つ引張りばねを緊張状態に保持する補助装置は必要ない。
有利には、操作装置を部分的に解除した時の引張りばねの弛緩を阻止する制止装置が設けられている。これにより、引張りばねが緊張している間に操作装置が固定方向とは逆方向に戻り運動するのが阻止される。制止装置、有利には、摩擦面に対し作用する摩擦ベルトを含んでいる。操作装置を操作すると、有利には、操作装置は摩擦力を減少させる方向で摩擦ベルトに作用する。これにより、摩擦抵抗が減少し、すなわち操作方向での操作に抵抗し、すなわち操作装置の引き締めに抵抗する摩擦抵抗が減少する。引張りばねは、有利には、摩擦力を増大させる方向で摩擦ベルトに作用する。これにより、摩擦ベルトは引張りばねが弛緩するのを阻止する。操作装置は、解除方向に操作すると、有利には、操作装置は摩擦力を増大させる方向で摩擦ベルトに作用する。しかしながら、解除方向に操作した時も操作装置が摩擦力を減少させる方向で摩擦ベルトに作用するようにしてもよい。有利には、操作装置は固定方向に操作した時に摩擦ベルトの第1の端部に対し作用し、解除方向に操作した時に摩擦ベルトの第2の端部に対し作用する。
有利には、摩擦ベルトは引張りばねと一体に形成されている。これにより、必要とする個別部品数が減少し、組み立てが簡単になる。しかし、摩擦ベルトが引張りばねとは別個に形成されていてもよい。これにより、摩擦ベルトと引張りばねとを簡単に形成させることができる。引張りばねは、有利には、別個のばねケース内に配置されている。引張りばねを別個のばねケース内に配置することにより、装置全体の組み立てが容易になり、引張りばねを汚染から好適に保護できる。ばねケースは特に操作装置で保持されている。これにより、コンパクトな構成が得られる。ばねケースは、有利には、少なくとも部分的に操作装置内に配置されている。有利には、固定装置を完全に解除した時に引張りばねは弛緩する。これにより張設装置をガイドレールから簡単に取り外すことかでき、或いは、簡単にガイドレールに配置することができる。引張りばねはコイルばねであってよい。コイルばねは、通常、外側巻回部から及ぼされる力を吸収するケーシング内に配置される。本発明において、完全に弛緩したコイルばねとは、内端にばね力が作用しないようなコイルばねである。それにもかかわらず、外側巻回部は緊張状態にあり、力はばねケースによって吸収される。完全に弛緩したコイルばねとは、内端が外端に対してトルクを及ぼさないようなコイルばねである。
有利には、引張りばねの引張り距離と、固定装置の最大操作距離とは互いに整合している。その際有利には、引張りばねの最大引張り距離は固定装置の最大操作距離よりも大きい。これにより、操作装置が操作方向に変位する際、引張りばねが引張られすぎないよう保証されている。引張りばねがコイルばねであり、且つ固定装置がねじ山を有し、該ねじ山が、ガイドレールの取り付け取り外しのために対向ねじ山に螺合し、或いは、対向ねじ山から取り外されるならば、有利には、引張りばねを緊張させる際に両端部が互いに逆方向に回転する許容回転数量が、ガイドレールを完全に固定するまでに固定装置をねじ込み可能な固定装置のねじ山の数量よりも多いように構成されている。
引張りばねは有利にはコイルばねであり、操作装置は操作方向と解除方向とに回転可能である。これにより、固定装置の簡単で直感的な操作が得られる。ガイドレールまたはチェーンの取り付け取り外しには、操作装置を操作方向に回転させるだけでよい。その際に引張りばねが緊張し、同時に引張りばねはチェーンを緊張させる。操作装置は有利にはねじ山を有している。操作装置の回転運動により、このねじ山を介して、ガイドレールの面に対し横方向において操作装置の移動が生じる。操作装置の操作の際、ガイドレールの面に対し横方向での操作装置の運動を介してガイドレールが締め付けられ、操作装置の回転運動を介して張設装置が緊張する。この場合操作装置は、ガイドレールが作業機のケーシングで締め付け保持されるまで回転させることができるので、有利である。操作装置を解除のために解除方向へ回転させる。その際同時にコイルばねが弛緩し、その結果チェーンまたはガイドレールの簡単な交換が可能になる。解除方向での操作装置の回転運動により、同時にねじ山を介して操作装置はガイドレールの面に対し横方向に移動し、これによってガイドレールの締め付けが解除される。
簡潔な構成は、引張りばねが少なくとも部分的に操作装置によって画成された内部空間内に配置されているならば得られる。有利には、ガイドレールの固定領域は、張設装置のための受容部を有しているスプロケットホイールカバーによって覆われている。これによって簡潔でコンパクトな構成が得られる。スプロケットホイールカバーの交換によって、張設装置を既存の作業機にも簡単に追装備することができる。
有利には、張設装置は変位用スライドガイド(Verschiebekulisse)を有し、該変位用スライドガイドのそれぞれの回転位置にガイドレールの位置が割り当てられている。変位用スライドガイドを介して、張設装置によって生じた回転運動をガイドレールの縦運動に簡単に転換させることができる。変位用スライドガイドは、特にピンが案内されているスパイラルガイドである。たとえばチェーンが熱変形のためにオーバーテンション状態になったときに、ガイドレールを張設方向とは逆方向に変位させるため、有利には、スパイラルガイドのピッチ角は、変位用スライドガイドが張設方向とは逆の方向において自動制動しないように設計されている。これにより、チェーンの張力が張設装置によって与えられた張力を越えないよう保証される。変位用スライドガイドは、有利には、引張りばねと作用結合している。
たとえば作動中の振動のために張設装置がひとりでに緩むのを確実に阻止するため、有利には、
張設装置は、変位用スライドガイドの回転位置を形状拘束的に固定する位置固定装置を有している。この場合位置固定装置は、有利には、操作装置が完全固定位置に到達する直前に該位置固定装置が作用するように構成され、その結果操作装置の操作および解除が位置固定装置によって困難にならない。
張設装置は、変位用スライドガイドの回転位置を形状拘束的に固定する位置固定装置を有している。この場合位置固定装置は、有利には、操作装置が完全固定位置に到達する直前に該位置固定装置が作用するように構成され、その結果操作装置の操作および解除が位置固定装置によって困難にならない。
簡潔な構成は、変位用スライドガイドが引張りばねのばねケースに形成されているならば得られる。
有利には、作業機は、操作装置をケーシング部分に対し形状拘束的に位置固定する操作装置用固定部を有している。これにより、たとえば振動による作動中の操作装置の不慮の回転を阻止することができる。操作装置が回動可能な湾曲体を有し、該湾曲体が固定位置でケーシング部分と相対回転不能に結合され、操作位置で操作装置の操作を可能にするならば、簡潔な構成が得られる。これによって簡単な操作が達成される。操作装置を解除するには、回動可能な湾曲体を操作位置へ回動させるだけでよい。その後、操作装置を操作することができ、たとえば回転させることができる。
次に、本発明のいくつかの実施形態を図面を用いて説明する。
パワーソーの側面図である。
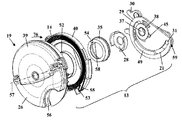
図1のパワーソーのガイドレールの固定領域の展開斜視図である。
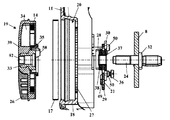
ガイドレールの固定領域の展開断面図である。
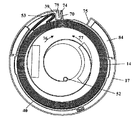
ガイドレールの固定領域の断面図である。
固定装置の展開斜視図である。
固定装置の展開斜視図である。
固定装置の展開斜視図である。
固定装置の展開斜視図である。
固定装置の展開斜視図である。
引張りばね、ばねケース、摩擦ベルトの側面図である。
図12の線XI−XIによる断面図である。
パワーソーの操作装置の断面図である。
操作装置とブレーキバンドの展開斜視図である。
操作装置とブレーキバンドの斜視図である。
図14の部分XVの拡大図である。
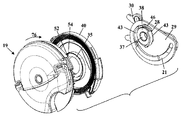
パワーソーの張設装置の1実施形態の展開斜視図である。
図16の張設装置の断面図である。
図16および図17の張設装置の弾性要素の側面図である。
ばねケースに設けた図18の弾性要素の側面図である。
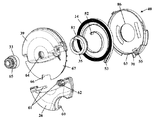
パワーソーのガイドレールの固定領域の展開斜視図である。
パワーソーのガイドレールの固定領域の展開斜視図である。
パワーソーのガイドレールの固定領域の展開斜視図である。
パワーソーのガイドレールの固定領域の展開斜視図である。
パワーソーのガイドレールの固定領域の展開斜視図である。
図20ないし図24の固定領域の端雌図である。
操作装置を操作方向に操作した時の弾性要素の領域における図20ないし図24の張設装置の断面図である。
ばねケースを省略した図示した、操作装置を解除方向に操作した時の図26の配置構成の断面図である。
図1は、手で操縦される作業機の実施形態としてパワーソー1を示している。パワーソー1はケーシング2を有し、該ケーシングにはガイドレール8が固定装置12を介して固定されている。ガイドレール8には、スプロケットホイール10によって駆動されるチェーン9が周回するように案内されている。チェーン9はソーチェーンとして形成されている。作業機は石切断機であってもよく、石切断機の場合には、ガイドレール8に、石を切断するために切断チェーンとして形成されたチェーン9が配置される。チェーン9を張設するには、ガイドレール8をケーシング2に対して張設方向15に移動させる。張設方向15は、ケーシング2から、ガイドレール8の端部であって該ケーシング2から離間している前記端部のほうへ方向づけられている。ケーシング2が固定されている、ガイドレール8の領域も、スプロケットホイール10と同様にスプロケットホイールカバー11によって覆われている。
作動中にパワーソー1を操縦するため、ケーシング2に後部ハンドグリップ3が配置され、該後部ハンドグリップにはスロットルレバー4とスロットルレバーロック5とが回動可能に支持されている。スロットルレバー4を介して、ケーシング2内に配置されている駆動原動機150が操作される。本実施形態では、駆動原動機150は内燃エンジンとして構成されている。しかし駆動原動機150は電動機であってもよく、電動機は、接続ケーブルを介してエネルギー供給源と接続されているか、或いは、バッテリーまたはアキュムレータからエネルギーの供給を受ける。
パワーソー1は、該パワーソー1のケーシング2とオーバーラップしているグリップパイプ6と、該グリップパイプ6のガイドレール8側に延在している手保護部7とを有している。手保護部7は、有利には、チェーン9用のブレーキ装置(図示せず)を起動させるために用いる。
固定装置12は操作装置19によって操作される。操作装置19は、本実施形態では、回転ホイールとして構成されている。図1に図示した、操作装置19の非操作状態では、操作装置19はスプロケットカバー11の外面とほぼ面一になっている。操作装置19を操作するには、該操作装置19の湾曲体26を外側へ開かねばならない。操作者が湾曲体26をうまく把持することができるようにするため、湾曲体26には把持凹部56が設けられている。固定装置12を解除するには、操作装置19を解除方向77へ回転させる。本実施形態では、解除方向77は回転方向において反時計方向に延びている。ガイドレール8を固定するため、操作装置19を固定方向76に回転させる。固定方向76は、本実施形態では時計方向に方向づけられている。操作装置19の回転運動の代わりに、操作装置19の他の運動も可能で、たとえばスプロケットホイールカバー11に沿った直線運動を設けるようにしてもよい。
チェーン9を張設するため、パワーソー1は図4に図示した張設装置13を有している。張設装置13は図4に図示した引張りばね14を含んでいる。引張りばね14は、本実施形態では、コイルばねとして構成されている。引張りばね14は、後述する変位用スリットガイドに作用する。変位用スリットガイドも張設装置13の一部であり、引張りばね14の回転運動を、図1および図2に示した張設方向15でのガイドレール8の縦運動に変換する。
図2は張設装置13の一部分の展開図である。張設装置13の、操作装置19内に配置されている部分は、この図では見えない。スプロケットホイールカバー11は受容部20を有し、その底部89は開口部91を有している。開口部91は受容部20の端面の大部分にわたって延在し、その結果底部89は、実質的に、周回するように延在するエッジによって形成されている。底部89は歯付き輪郭部27を有している。その機能については後述する。受容部20の外周には摩擦面18が形成され、該摩擦面に対し摩擦ベルト17が作用する。摩擦ベルト17は、操作装置19と摩擦面18との間に位置するように操作装置19の外周に配置されている。摩擦ベルト17は摩擦面18とともに制止装置16を形成している。制止装置16の機能に関しては後述する。張設装置13は回転要素29と変位要素30とを含み、これら回転要素と変位要素とはスプロケットホイールカバー11のケーシング2側に配置されている。回転要素29には、後述するように、引張りばね14(図3および図4)の一端との相対回転不能結合に用いる駆動体(または連行体)28が相対回転不能に保持されている。回転要素29は変位用スリットガイドとしてスパイラルガイド21を有している。スパイラルガイド21内には、変位要素30のピン31が配置されている。変位要素30は図3に示した保持突起50でもってガイドレール8の開口部23内へ突出して、ガイドレール8と相対回転不能に結合されている。
パワーソーのケーシング2には、固定ピン24とガイドピン25とが固定され、これらはそれぞれガイドレール8を当接させるための鍔32を有している。固定ピン24とガイドピン25とはガイドレール8の縦溝22を貫通している。固定ピン24とガイドピン25とは、さらに、図5に示した変位要素30の縦スリット41を貫通している。これにより、変位要素30とガイドレール8とを、縦溝22および縦スリット41の方向に方向づけられた張設方向15とケーシング2に対し逆方向とにおいて移動させることができる。回転軸線92のまわりでの回転要素29の回転により、ピン31とスパイラルガイド21内で移動する。これによって回転要素29の回転軸線92に対するピン31の間隔が変化する。回転軸線92は操作装置19の回転軸線である。ピン31と回転軸線92との間の間隔が小さくなると、変位要素30は張設方向15に変位する。
図3が示すように、駆動体28と回転要素29と変位要素30とは回転軸線92の方向で互い固定結合されている。この結合を確実にするため、リベットスリーブ37と皿ばね38とが用いられる。皿ばね38は、操作装置19を構造的に予め設定される角度範囲で引き締めたときに、常時増大する引き締めモーメントを生じさせる。これにより操作者は、螺合部が固定されてガイドレール8が締め付け保持されていることがわかる。前記構造的に予め設定される角度範囲は、ほぼ90゜ないしほぼ360゜であり、特にほぼ180゜である。この角度範囲は360゜以上であってもよい。
ガイドレール8を変位要素30に固定するため、保持突起50にねじ込まれる固定ねじ36を設けてよい。これにより、操作装置19が完全に固定されていない場合、保持突起50が開口部23から抜け出てガイドレール8にだけ当接するのが阻止される。また図3が示すように、スパイラルガイド21には隆起部49が形成されている。回転要素29は有利には厚い鋼板から成り、この鋼板にスパイラルガイド21が刻設される。スパイラルガイド21を刻設する際に隆起部49が生じる。鋼材はたとえば1mm以上の厚さを有していてよい。これにより、回転要素29に大きな力が作用しても、回転要素29の機械的安定性が確保される。
図3が示すように、張設装置13の引張りばね14は操作装置19の内部空間34内に配置されている。操作装置19は、内部空間34を画成しているベース体39を有している。ベース体39にはスクリュースリーブ33が保持されている。スクリュースリーブ33は、ベース体39と形状拘束的に結合され、および/または、有利にはプラスチック部材であるベース体39に射出成形されている。スクリュースリーブ33は、図4が示すように、固定装置12を固定ボルト24に螺着するために用いられる。
図3と図4が示すように、引張りばね14はばねケース40内に配置され、ばねケース40は操作装置19の内部空間34をスプロケットホイールカバー11の内面に対し閉鎖させている。これによって引張りばね14は汚染から保護されている。ベース体39には駆動体35が回転可能に支持されている。駆動体35には引張りばね14の内端が固定され、外端はベース体39と相対回転不能に結合されている。駆動体35は少なくとも1つの駆動体突出部58を有している。本実施形態では、互いに対向しあっている2つの駆動体突出部58が設けられ、そのうち図3には1つが図示されている。各駆動体突出部58は、駆動体28の、図5に図示した駆動体突出部43の間に突出して、引張りばね14の内端と駆動体28との間の相対回転不能結合を形成させている。駆動体48は、図5に図示した凹部44と回転要素29に設けたピン45とを介して、回転要素29と相対回転不能に結合されている。これにより引張りばね14のばね力は回転要素29に作用する。
図4が示すように、固定装置12を固定すると、スクリュースリーブ33は皿ばね38と、駆動体28と、回転要素29と、変位要素30とを介してガイドレール8に対し作用を及ぼし、これによってガイドレール8を鍔32と、図4に図示したパワーサー1のケーシング2とに押圧させる。有利には、スクリュースリーブ33と皿ばね38と駆動体28と回転要素29と変位要素30とは金属から成っており、その結果ガイドレール8の好適な固定が生じる。
内19のベース体39はその端面にエッジ83を有し、エッジ83は受容部20の底部89に対し押圧されて、スプロケットホイールカバー11をケーシング2に対し押圧し、その結果スプロケットホイールカバー11が好適に固定される。有利には、ベース体39は、すプロけってホイールカバー11を固定するための締め付け力が直接スプロケットホイールカバー11の受容部20の底部89に導入され、ばねケース40のような他の構成要素を力伝達系の中に配置しなくても済むように、構成されている。これは、公差を適宜設計することにより、或いは、所定の当接面積に応じた構成を採用することによって達成できる。
図5ないし図7は張設装置13の詳細図である。張設装置13はリベットスリーブ37を含み、該リベットスリーブは、変位要素30の縦スリット41と、回転要素29の開口部51と、駆動体28の開口部42と、皿ばね38とを貫通突出している。リベットスリーブ37はこれらの構成要素を軸線方向に位置固定するように、しかし回転可能に結合させている。駆動体28と回転要素39との相対回転不能な結合は、駆動体28に設けた凹部44と、回転要素29に設けたピン45とによって達成される。回転要素29は2つの駆動体開口部46を有し、これらの駆動体開口部46は、駆動体35の駆動体突出部58(図3)が駆動体開口部46に係合できるように、方向づけられている。これにより、さらに、駆動体35と回転要素29との間のダイレクトな相対回転不能結合を達成できる。駆動体28の駆動体突出部43および回転要素29の駆動体開口部46のサイズおよび公差に関する設計に応じて、駆動体突出部43、駆動体開口部46、またはその双方を介して前記相対回転不能な結合が達成される。
図6は、リベットスリーブ37と皿ばね38を備えた回転要素29を、構成を明確にするために皿ばね38と回転要素29との間に配置される駆動体28を省略して示したものである。駆動体28が皿ばね38と回転要素29との間に配置されている実際の配置構成は、図7に図示されている。
図5がさらに示すように、ピン31に隣接するように変位要素30には位置固定輪郭部48が形成されている。位置固定輪郭部48は、ピン31の、縦スリット41とは逆の側に配置されている。回転要素29は位置固定輪郭部47を有し、該位置固定輪郭部47に位置固定輪郭部48が固定装置12を完全に固定した時に係合する。これによって回転要素29と変位要素30との形状拘束的結合が達成される。位置固定輪郭部47と48は、作動中に回転要素29が変位要素30に対し回転するのを阻止し、よってチェーン9の張設が変化しないように、特にチェーン9が緩まないようにする位置固定装置59(図6)を形成している。
図5が示すように、スパイラルガイド21は回転軸線92のまわりでの1回転以下に相当する分だけ延在している。これにより、スパイラルガイド21が周方向と成す角度は比較的大きい。これにより、チェーン張力が引張りばね14の力を著しく越えたときに、ガイドレール8は変位要素30を引張りばね14の力に抗して張設方向15とは逆方向へ移動させることができる。このケースは、たとえばチェーン9を暖かい状態で張設し、その後張設装置13を固定するようなケースである。冷えている状態ではチェーン9が収縮し、これによってチェーン張力は著しく大きくなる。この時、チェーン9を場合によっては手でもガイドレール8を介して移動させることはできない。
図6と図7が示しているように、引張りばね14はコイルばねとして形成されている。引張りばね14は外端53を有し、この外端はばねケース40の受容部55に固定されている。引張りばね14は内端52を有し、この内端は駆動体35に設けた受容部54に掛止されている。操作装置19はばねケース40と相対回転不能に結合されている。固定方向76での操作装置19の回転により、引張りばね14の外端53は内端52に対し移動する。これによって引張りばね14が緊張する。
図6に示唆したように、湾曲体26は回動軸線57のまわりで操作装置19のベース体39に対し回動可能である。このため、図8に図示した2つの支持ピン61が設けられている。支持ピン61は湾曲体26を回動可能にベース体39で支持している。湾曲体26は、ばね62を介して、受容部20に連結される位置の方向に張設されている。湾曲体26は、該湾曲体26の連結時に回転軸線92(図4)に対しほぼ平行に延在する少なくとも1つの固定ピン60を有している。湾曲体26は連結状態でベース体39の壁67に隣接している。図4が示すように、壁67は内部空間34をも画成しており、その結果引張りばね14は汚染から保護されている。壁67は繰り抜き部66を有し、該繰り抜き部を固定ピン60が貫通突出している。固定ピン60は、受容部20の底部89に設けた、図2および図3に図示した歯付き輪郭部27に係合して、操作装置19を形状拘束的に固定することでスプロケットホイールカバー11での回転を阻止している。図2が示すように、歯付き輪郭部27はスプロケットホイールカバー11の内部空間のほうへ開口している。これにより、歯付きリング27の領域に集積した塵埃が固定ピン60からスプロケットホイールカバー11の内部へ押され、そこから周囲に到達する。これによって歯付きリング27の消耗が阻止されている。
図8が示すように、ベース体39は歯部64を有し、この歯部にスクリュースリーブ33の歯部65が係合している。これによってスクリュースリーブ33はベース体で形状拘束的に保持されている。歯部64と65を互いに別個に製造して、スクリュースリーブ33をベース体39内へ圧入するようにしてもよい。しかし、歯部65を備えたスクリュースリーブ33をベース体39から押し出し被覆し、その際に歯部64が生じるようにしてもよい。
図8と図12が示すように、ばねケース40は開口部86を有し、該開口部86を駆動体35が貫通突出している。駆動体35は外側へ突出して周回するように延在しているエッジ87を有し、該エッジ87は開口部86に隣接してばねケース40に当接し、駆動体35を軸線方向に位置固定させる。ばねケース40は、開口部86に隣接するように、駆動体35のエッジ87の領域を取り囲む接続部材88を有している。駆動体突出部58は接続部材88から突出している。駆動体突出部58は傾斜部71を有し、該傾斜部71は、駆動体35を駆動体28に嵌合させるときに案内傾斜部として用いられ、嵌合を容易にさせる。操作装置19を解除方向77(図11)に操作すると、傾斜部71が設けられているため、操作装置19が固定ボルト24(図4)から十分に離間して取り外されたときに、駆動体突出部58と駆動体28の駆動体突出部43(図7)との係合が解除される。これにより、引張りばね14が逆回転することにより、すなわち引張りばね14が引張り方向とは逆方向に回転することにより破損するのが回避される。ばねケース40での駆動体35の配置は図9にも図示されている。
図9が示すように、ベース体39のエッジ83は繰り抜き部69を有し、該繰り抜き部69内に、ばねケース40のエッジ81に形成された突起68が突出している。これによってばねケース40とベース体39とは互いに相対回転不能に結合されている。図9がさらに示すように、べース体39は支持細条部82を有し、該支持細条部82は、たとえば薄い射出成形部品としてプラスチックから形成されていてよいばねケース40を支持し、ばねケース40の変形を阻止する。
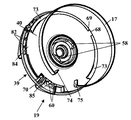
図8が示すように、ばねケース40は操作細条部70を有している。図10はばねケース40に設けた摩擦ベルト17を示している。摩擦ベルト17は第1の端部74と、第2の端部75とを有している。第1の端部74は、操作細条部70とばねケース40に形成された第1の係止面78との間に突出している。第1の係止面78は図11に図示され、図10では概略的に図示してある。第2の端部75は、ベース体39の壁80と湾曲体26に設けた壁93との間に突出している。これは図11に図示してある。
操作装置21が完全に開口している状態では、引張りばね14は弛緩している。操作装置19を固定方向76に回転させると、すなわち図10の図示で時計方向に回転させると、操作装置19のベース体39とばねケース40と歯摩擦ベルト17に対して移動して、第1の係止面78が摩擦ベルト17の第1の端部74と接触する。このとき第2の端部75は壁93に対し間隔を有している。係止面78は摩擦ベルト17を連行し、これによって摩擦ベルト17の径をわずかに縮小させる。これによって摩擦ベルト17と摩擦面18との間にわずかな摩擦抵抗が発生し、操作装置19を簡単に操作することができる。
引張りばね14の内端52は回転要素29と相対回転不能に結合されている。ガイドレール8と固定ピン24とガイドピン25とケーシング2(図4)との間の摩擦抵抗により、引張りばね14の弛緩時に内端52は位置固定して保持されている。これにより、引張りばね14は固定方向76での操作装置19の操作時に緊張する。引張りばね14の力が、回転要素29と変位要素30とガイドレール8とに作用する摩擦力を上回ると、回転要素29が回転し、変位要素30がガイドレール8とともに変位し、その際にチェーン9を緊張させる。引張りばね14の最大引張り力は張設装置13を完全に固定するかなり以前に達成され、その結果所望の緊張力でのチェーン9の張設が保証されている。その際スクリュースリーブ33と固定ピン24とは、固定装置12を完全に固定した時に引張りばね14がまだ完全に緊張状態でないように、引張りばね14に対し整合されている。引張りばね14の最大引張り距離は、すなわち引張りばね14を最大に緊張させることのできる回転の回数は、固定装置12の最大操作距離よりも大きく、すなわちガイドレール8が変位要素30と固定ピン24との間で締め付け固定されるまで操作装置19を固定ボルト24に螺合させることのできるねじ山の数量よりも大きい。操作装置19を固定方向76に回転させると、スクリュースリーブ33が固定ピン24に螺合し、これによってガイドレール8が固定される。同時に引張りばね14が緊張状態になる。引張りばね14は緊張方向15でのガイドレール8の変位によってチェーン9を緊張させる。チェーン9の緊張は、チェーン9がガイドレール8上に完全に当接するまで行う。操作装置19の最後の回転の際に、位置固定輪郭部47と48が互いに形状拘束的に係合し、その結果回転要素19と変位要素30とはもはや互いに相対的に回転することができない。操作装置19をさらに固定方向76に回転させると、ガイドレール8が締め付けられて固定される。
変位要素30は図5に示した線63に沿って回転要素29からわずかに離間しており、ガイドレール8のほうへ湾曲している。固定装置12が解除された状態では、位置固定輪郭部47と48は互いに係合していない。システムを引き締めたときに変位要素30がガイドレール8に当接し、変位要素30の、ピン31を有している領域が、回転要素29のほうへ湾曲した時にはじめて、位置固定輪郭部47と48が互いに係合し合う。
固定装置12を解除すると、すなわち操作装置19を解除方向77に回転させると、操作細条部70が摩擦ベルト17の第1の端部74に当接する。その際摩擦ベルト17の第2の端部75は壁80と接触しない。操作細条部70が解除方向77に移動するため、摩擦ベルト17がわずかに拡張し、摩擦面18に対し押圧される。これにより、操作者は、操作装置を解除方向に操作するには、さらに摩擦ベルト17と摩擦面18との間の摩擦抵抗を克服しなければならない。引張りばね14も同様に解除方向77においてばねケース40と操作装置19とに作用する。もし操作者が操作装置19を任意の非完全固定位置で手を離すと、引張りばね14は操作細条部70を摩擦ベルト17の第1の端部74のほうへ移動させ、これによって操作装置19の摩擦固定を生じさせる。これにより、操作装置19の自動戻り回転が引張りばね14の力によって阻止されている。固定装置12を固定していないときの引張りばね14の弛緩は、制止装置16によって阻止されている。引張りばね14のわずかな弛緩は、摩擦ベルト17が摩擦面18に摩擦当接するまで可能である。コイルばねとして形成された引張りばね14の、広範囲にわたって一定のばね力を生じさせるばね定数により、張設装置13の機能にとって引張りばね14のわずかな弛緩は問題でない。操作装置19を固定ボルト24から完全に取り外すと、引張りばね14は完全に弛緩する。
図11が示すように、ベース体19は、操作細条部70に隣接して支持リブ85を有し、該支持リブで操作細条部70が支持されている。これにより、摩擦ベルト17の第1の端部74による操作細条部70の過度な変形が阻止される。
図11が示すように、引張りばね14の中心軸線72は操作装置19の回転軸線92に対しわずかな間隔で配置されている。これにより、固定ピン60に対し十分な構成空間が提供される。同時に、引張りばね14が回転軸線92に対し軸線をずらして配置されていることにより、引張りばね14の大きな外周が得られる。その際、中心軸線72は引張りばね14の外側壁の幾何学的中心である。図11は内端52に駆動体35が掛止されていることをも示している。また図11が示すように、ばねケース40の領域84は支持リブ85に当接している。
図12ないし図15が示すように、本実施形態では、2つの固定ピン60が設けられている。他の個数の固定ピン60も有利であり、たとえば1個または3個またはそれ以上の固定ピン60も有利である。湾曲体26を内側へ回転させたときに1つの固定ピン60が隙間にぶつからずに、歯輪郭部27の細条部にぶつかると、歯輪郭部27が破損することがある。歯輪郭部27に作用する力を軽減し、歯輪郭部27の破損を回避するため、複数の固定ピン60を設けるのが有利である。有利には、少なくとも1つの固定ピン60は金属から成り、或いは、金属被覆部を有しているのがよい。これにより固定ピン60の摩耗を低減させることができる。図13はばねケース40の領域84を支持細条部82に配置した構成を示している。また図13が示すように、ベース体39はばねケース40に形状拘束的に係合している。このため、繰り抜き部69の両側に位置するようにベース体39に複数の細条部73が形成され、これらの細条部73はエッジ83の一部であり、受容部20の底部89(図2)に対し作用する。細条部73は歯輪郭部27を部分的に覆っている。これにより、塵埃がスプロケットホイールカバー11の内部空間から歯輪郭部27を通って摩擦ベルト17に到達するのが困難になる。
図13と図14は、互いに対向し合うように配置された、駆動体35の2つの駆動体突出部58をも示している。
図15の拡大図が示しているように、第1の端部74は係止面78と操作細条部70との間にある。係止面78と操作細条部70との間隔は、第2の端部75と壁80または壁93との間隔よりも著しく小さい。これにより、第2の端部75が壁80または壁93と接触しないよう保証されている。本実施形態では、壁93は1個の固定ピン60に形成されている。第2の端部75は作動中に機能しない。摩擦ベルト17を対称形成することにより、摩擦ベルト17の取り付けミスは起こり得ない。
図16ないし図19は、操作装置19および張設装置13の他の1実施形態を示している。なお、前記の図に図示した対応する構成要素には同一の参照符号を付すので、前記の図の説明を参照してもらいたい。
図16の操作装置19は湾曲体26を有し、該湾曲体は外側へ突出する固定ピン90を有している。図17が示すように、受容部20には、スプロケットホイールカバー11の内部空間に対し閉じるように形成された歯輪郭部97が形成されている。
図16が示すように、張設装置13は、引張りばね95と外引張りばね95に一体成形された摩擦ベルト96とを含んでいる弾性要素94を有している。摩擦ベルト96は、引張りばね95の巻回方向とは逆の方向で該引張りばね95を取り囲んでいる。摩擦ベルト96の第1の端部74には、引張りばね95の外端103が接続している。引張りばね95の内端102は駆動体105への掛止のために形成されている。このため、駆動体105は受容部54を有している。駆動体105はリング状に形成され、その内周に全部で4つの駆動体突出部106を有している。各駆動体突出部106は傾斜部107を有し、該傾斜部は駆動体突出部106の端面全体にわたって延在している。張設装置13は回転要素99を含み、該回転要素に駆動体108が一体成形されている。駆動体108は別個の部材から形成されていてもよく、回転要素99に相対回転不能に固定されていてよい。駆動体108はその外周に全部で4つの駆動体突出部109を有し、これらの駆動体突出部はその駆動体105側端面に傾斜部110を有している。傾斜部107と110は案内傾斜部を形成しており、駆動体105と108相互の差し込みを容易にする。
回転要素99は、回転軸線(図17)のまわりに2回転以上で延在しているスパイラルガイド111を有している。これによってスパイラルガイド111は自動制動作用を持つ。これにより、ガイドレール8と変位要素30とに作用する力は回転要素99を回転させることができない。チェーン張力を減少させるには、操作者は回転要素99を手で移動させねばならない。
また図16が示すように、引張りばね95はばねケース100内に配置されている。図17が示すように、ベース体39のエッジ83の端面には、ばねケース100をスプロケットホイールカバー11の内部空間に対し覆っているカバーディスク98が配置されている。カバーディスク98は有利にはスプロケットホイールカバー11に固定され、たとえばねじまたはクリップで固定されている。本実施形態では、ばねケース100は内部空間34に対し実質的に閉じているように形成されている。駆動体105は、ばねケース100の底部とカバーディスク98との間に配置されている。駆動体108は駆動体105に係合しており、これによって駆動体突出部106と109が互いに係合する。図17が示すように、摩擦ベルト96はベース体39のエッジ83を取り囲み、受容部20の摩擦面18に隣接するように配置されている。摩擦ベルト96は摩擦面18とともに制止装置16を形成している。
図18はばねケース94の詳細図である。引張りばね95は十分な巻回数を持ち、たとえば第1実施形態での巻回数に対応している。図では、見やすくために引張りばね95の巻回数は3でしかない。引張りばね95の外端103には、摩擦ベルト96の第1の端部74が接続している。
図19が示すように、ばねケース100は回転軸線92に対し同軸に配置されている。ばねケース100は貫通穴101を有し、該貫通穴を通じて摩擦ベルト96の第1の端部74が突出している。操作装置19のベース体39には、摩擦ベルト96の第1の端部74に隣接するように係止面78が形成されている。操作装置19を固定方向76へ移動させると、係止面78は摩擦ベルト96を第1の端部74において連行し、これによって摩擦ベルト96と摩擦面18との間の摩擦を減少させる。同時に、第1の端部74を介して引張りばね95の外端103が連行され、これによって引張りばね95が緊張する。操作装置19を離すと、引張りばね95は弛緩しようとする。その際、引張りばねは第1の端部74を係止面78の方向へ移動させ、これによって摩擦ベルト96を拡大させて摩擦面18に当接させる。これによって解除方向76での操作装置19の移動が制止されて、引張りばね95の更なる弛緩を阻止する。
図20ないし図27は張設装置13の他の1実施形態を示すもので、前記の図と同一の構成要素には同一の参照符号を付す。操作装置19には駆動体118が保持されている。駆動体118は、図21が示しているように、3つの駆動体突出部120を有している。駆動体突出部120は、操作装置19のベース体39に設けた開口部117を貫通突出し、これによって周方向に、すなわち固定方向76に、および解除方向77に、ベース体39と形状拘束的に結合されている。駆動体118は操作装置19のベース体39に押し出し被覆されていてよく、これによって操作装置19で保持されていてよい。湾曲体26には全部で3つの固定ピン60が形成され、これらの固定ピン60は、湾曲体26をベース体39に当てた位置では、スプロケットホイールカバー11に設けた歯輪郭部27に係合して、操作装置19を形状拘束的に位置固定させることでスプロケットホイールカバー11に対する回転を阻止する。
張設装置13は、図20が示しているように、スパイラルガイド111が形成されているばねケース119を含んでいる。スパイラルガイド111は図16に図示したスパイラルガイド111に対応し、自動制動するように構成されている。
図21が示すように、張設装置13は、ばねケース119内に配置される弾性要素124を含んでいる。弾性要素124用のばねケース119は、張設装置13の回転要素を形成している。また図21が示すように、ばねケース119には、スパイラルガイド111に隣接するように位置固定輪郭部47が形成され、該位置固定輪郭部は微細歯部として実施され、図23に図示他、変位要素30に設けられる位置固定輪郭部48と協働する。張設装置13は、駆動体突出部122を有する駆動体121を含んでいる。全部で3つの駆動体突出部122が設けられている。これら駆動体突出部122の間の間隔は、これら駆動体突出部122の間に駆動体118の駆動体突出部120が係合できるように選定されている。張設装置13は、さらに、開口部127を有するスリーブ123を含んでいる。開口部127には、互いに対向し合うように配置された2つの平坦部128が形成されている。
図22は、ばねケース119内に弾性要素124を鉢した構成を示している。図22が示すように、ばねケース119は、弾性要素124を取り囲むエッジ136を有している。
図23が示すように、ばねケース119と変位要素30とを結合させるため、リベットスリーブ129が設けられている。リベットスリーブ129は互いに対向しあっている複数の係止面132を有し、これらの係止面132は取り付け状態でスリーブ123の平坦部128に当接して、スリーブ123をリベットスリーブ129と相対回転不能に結合させる。さらに、平坦部132は、リベットスリーブ129を変位要素30内で相対回転不能に位置固定するようなサイズに選定されている。これにより、スリーブ132と変位要素30との相対回転不能な結合が達成される。その際、スリーブ123はばねケース119の開口部130と、有利にはスリーブ123の変位要素30とは逆の側に配置されている皿ばね131とを貫通突出する。
図23と図24が示すように、弾性要素124は引張りばね125と摩擦ベルト126とを含んでいる。摩擦ベルト126は引張りばね125の内端134に一体成形されている。摩擦ベルト126はスリーブ123を取り囲んでいる。スリーブ123の外周には、摩擦ベルト126が協働する摩擦面137が形成されている。引張りばね125の内端134は、摩擦ベルト126を介して変位要素30と相対回転不能に結合されている。駆動体121はスリーブ123および摩擦ベルト126とオーバーラップしている。
図20、図21、図25が示すように、操作装置19のベース体39はエッジ140を有している。図25が示すように、ばねケース119のエッジ136はエッジ140に隣接するように配置されているが、エッジ140に対しては間隔を有している。ベース体39とばねケース119とは、弾性要素124を内設した内部空間34を画成している。エッジ136と140の間に形成された隙間と、エッジ136とスプロケットホイールカバー11との間に形成された隙間とを介して、内部空間34はスプロケットホイールカバー11の内部空間に対し開口している。
図26は、ばねケース119の断面図である。引張りばね125は外端133を有し、この外端がばねケース119の受容部135に掛止されている。受容部135はばねケース119のエッジ136に設けた2つのスリットによって形成されている。摩擦ベルト126は、引張りばね125の内端134に一体成形されている第1の端部138と、第2の端部139とを有している。両端部138と139は駆動体118の駆動体突出部120の両側に配置されている。操作装置19が固定方向76に回転すると、駆動体突出部120が摩擦ベルト126の第1の端部138に対し作用して、摩擦ベルト126を拡大させ、その結果摩擦ベルト126とスリーブ123(図24)の摩擦面137との間の摩擦が減少する。摩擦ベルト126の第1の端部138を介して駆動体突出部120は隣接する駆動体121の駆動体突出部122に作用する。これにより、操作装置19が固定方向76に回転すると、同時に操作要素19のスリーブ(図4に図示したスリーブ33に対応している)がパワーソー1の固定ボルト24に螺合し、引張りばね125を駆動体121に巻き取って緊張状態にさせる。
操作者が操作装置19から手を離すと、引張りばね125は摩擦ベルト126の第1の端部138を駆動体突出部120の方向へ引張り、これにより摩擦ベルト126をスリーブ123の周囲に引き締める。スリーブ123がリベットスリーブ129および変位要素30と相対回転不能に結合されているため、引張りばね125が弛緩するのが阻止されている。摩擦ベルト126は摩擦面137とともに制止装置16を形成している。
操作者が操作装置を解除方向77に操作すると、図27に示したように、駆動体突出部120は摩擦ベルト126の第2の端部139のほうへ移動する。これによってブレーキバンド126はスリーブ123からわずかに持ち上げられ、摩擦面137(図24)での摩擦がわずかに減少する。これによって解除方向77での操作力がわずかに軽減する。
1 パワーソー
2 ケーシング
8 ガイドレール
9 チェーン
12 固定装置
13 張設装置
14,95,125 張設装置
15 張設方向
19 操作装置
76 固定方向
2 ケーシング
8 ガイドレール
9 チェーン
12 固定装置
13 張設装置
14,95,125 張設装置
15 張設方向
19 操作装置
76 固定方向
Claims (16)
- チェーン(9)として形成された工具が周回するように配置されているガイドレール(8)を備えた手で操縦される作業機であって、ケーシング(2)と、前記ガイドレール(8)を前記ケーシング(2)に固定するための固定装置(12)とが設けられ、前記固定装置(12)が、前記ガイドレール(8)を固定方向(76)に固定するために操作される操作装置(19)を有し、前記チェーン(9)のための張設装置(13)が設けられ、該張設装置(13)が、前記固定装置(12)を解除した時に前記チェーン(9)の張設方向(15)に前記ガイドレール(8)に対し力を作用させる引張りばね(14,95,125)を含んでいる前記作業機において、
前記引張りばね(14,95,125)が、前記操作装置(19)と作用結合し、前記操作装置(19)を前記固定方向(76)に操作した時に緊張状態になることを特徴とする作業機。 - 前記操作装置(19)を部分的に解除した時の前記引張りばね(14,95,125)の弛緩を阻止する制止装置(16)が設けられていることを特徴とする、請求項1に記載の作業機。
- 前記制止装置(16)が、摩擦面(18,137)に対し作用する摩擦ベルト(17,96,126)を含み、前記操作装置(19)が操作方向(76)に操作した時に摩擦力を減少させる方向で前記摩擦ベルト(17,96,126)に作用し、前記引張りばね(14,95,125)が摩擦力を増大させる方向で前記摩擦ベルト(17,96,126)に作用することを特徴とする、請求項1または2に記載の作業機。
- 前記操作装置(19)が前記固定方向(76)に操作した時に前記摩擦ベルト(126)の第1の端部(138)に対し作用し、解除方向(77)に操作した時に前記摩擦ベルト(126)の第2の端部(139)に対し作用することを特徴とする、請求項3に記載の作業機。
- 前記摩擦ベルト(96,126)が前記引張りばね(95,125)と一体に形成されていることを特徴とする、請求項3または4に記載の作業機。
- 前記摩擦ベルト(17)が前記引張りばね(14)とは別個に形成されていることを特徴とする、請求項3または4に記載の作業機。
- 前記固定装置(12)を完全に解除した時に前記引張りばね(14,95,125)が弛緩することを特徴とする、請求項1から6までのいずれか一つに記載の作業機。
- 前記引張りばね(14,95,125)の最大引張り距離が前記固定装置(12)の最大操作距離よりも大きいことを特徴とする、請求項1から7までのいずれか一つに記載の作業機。
- 前記引張りばね(14,95,125)がコイルばねであり、前記操作装置(19)が操作方向(76)と解除方向(77)とに回転可能であることを特徴とする、請求項1から8までのいずれか一つに記載の作業機。
- 前記引張りばね(14,95,125)が少なくとも部分的に操作装置(19)によって画成された内部空間(34)内に配置されていることを特徴とする、請求項1から9までのいずれか一つに記載の作業機。
- 前記ガイドレール(8)の固定領域が、前記張設装置(13)のための受容部(20)を有しているスプロケットホイールカバー(11)によって覆われていることを特徴とする、請求項1から10までのいずれか一つに記載の作業機。
- 前記張設装置(13)が変位用スライドガイドを有し、該変位用スライドガイドのそれぞれの回転位置に前記ガイドレール(8)の位置が割り当てられていることを特徴とする、請求項1から11までのいずれか一つに記載の作業機。
- 前記変位用スライドガイドは、ピン(31)が案内されているスパイラルガイド(21,111)であることを特徴とする、請求項12に記載の作業機。
- 前記変位用スライドガイドが前記引張りばね(14,95,125)と作用結合していることを特徴とする、請求項12または13に記載の作業機。
- 前記張設装置(13)が、前記変位用スライドガイドの回転位置を形状拘束的に固定する位置固定装置(59)を有していることを特徴とする、請求項12から14までのいずれか一つに記載の作業機。
- 前記変位用スライドガイドが前記引張りばね(125)のばねケース(119)に形成されていることを特徴とする、請求項12から15までのいずれか一つに記載の作業機。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102013003850.2 | 2013-03-06 | ||
| DE102013003850.2A DE102013003850A1 (de) | 2013-03-06 | 2013-03-06 | Handgeführtes Arbeitsgerät mit einer Spannvorrichtung für eine Kette |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014172397A true JP2014172397A (ja) | 2014-09-22 |
Family
ID=50190163
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014041497A Pending JP2014172397A (ja) | 2013-03-06 | 2014-03-04 | チェーン張設装置を備えた手で操縦される作業機 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9713881B2 (ja) |
| EP (1) | EP2774733A1 (ja) |
| JP (1) | JP2014172397A (ja) |
| CN (1) | CN104308261B (ja) |
| BR (1) | BR102014003710A2 (ja) |
| DE (1) | DE102013003850A1 (ja) |
| RU (1) | RU2014107353A (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013003850A1 (de) * | 2013-03-06 | 2014-09-25 | Andreas Stihl Ag & Co. Kg | Handgeführtes Arbeitsgerät mit einer Spannvorrichtung für eine Kette |
| WO2014142722A1 (en) * | 2013-03-15 | 2014-09-18 | Husqvarna Ab | Chainsaw with self-locking knob assembly |
| JP6026943B2 (ja) * | 2013-03-29 | 2016-11-16 | 株式会社マキタ | チェンソーのガイドバー締結装置 |
| JP6360658B2 (ja) * | 2013-03-29 | 2018-07-18 | 株式会社マキタ | チェンソーのチェーン張力調整装置 |
| JP6132626B2 (ja) * | 2013-03-29 | 2017-05-24 | 株式会社マキタ | 携帯作業機 |
| DE102014007878A1 (de) * | 2014-05-24 | 2015-11-26 | Andreas Stihl Ag & Co. Kg | Handgeführtes Arbeitsgerät |
| US11685034B2 (en) | 2014-05-24 | 2023-06-27 | Andreas Stihl Ag & Co. Kg | Handheld work apparatus |
| WO2018141105A1 (zh) * | 2017-02-06 | 2018-08-09 | 南京德朔实业有限公司 | 链锯 |
| EP3385045B1 (de) | 2017-04-04 | 2022-01-26 | Andreas Stihl AG & Co. KG | Motorkettensäge |
Family Cites Families (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3636995A (en) * | 1970-07-02 | 1972-01-25 | Textron Inc | Tensioner for saw chain |
| US4129943A (en) * | 1977-11-25 | 1978-12-19 | Bricker Norman C | Chain saw bar tightener |
| US4382334A (en) * | 1981-07-01 | 1983-05-10 | Omark Industries, Inc. | Chain saw device |
| JPH0727122Y2 (ja) * | 1986-12-17 | 1995-06-21 | 株式会社共立 | チェーンソーのソーチェーンテンショナー |
| SE467488B (sv) * | 1990-12-10 | 1992-07-27 | Sandvik Ab | Faeste foer saagsvaerd |
| US5491899A (en) * | 1992-06-25 | 1996-02-20 | Stihl Andreas | Tensioning arrangement for a saw chain |
| DE4436543C2 (de) * | 1993-11-12 | 2002-07-11 | Stihl Maschf Andreas | Spanneinrichtung für eine über ein Sägeschwert laufende Sägekette einer Motorkettensäge |
| US5528835A (en) * | 1994-11-29 | 1996-06-25 | Ra; Do-Jin | Chain saw tensioning apparatus |
| GB9804796D0 (en) * | 1998-03-06 | 1998-04-29 | Black & Decker Inc | Clutch mechanism for a chain saw |
| DE19931250A1 (de) * | 1999-07-07 | 2001-01-11 | Bosch Gmbh Robert | Kettensäge |
| US6237228B1 (en) * | 1999-07-20 | 2001-05-29 | Andrew Moody | Apparatus for adjusting tightness of a chain saw cutting element |
| DE19934352B4 (de) * | 1999-07-22 | 2008-06-19 | Robert Bosch Gmbh | Kettensäge |
| DE19963650A1 (de) * | 1999-12-29 | 2001-07-12 | Bosch Gmbh Robert | Kettensäge |
| JP3712594B2 (ja) * | 2000-05-19 | 2005-11-02 | 株式会社マキタ | チェーンソー |
| US6560879B2 (en) * | 2001-08-02 | 2003-05-13 | Wci Outdoor Products, Inc. | Chain saw adjuster |
| DE20118322U1 (de) * | 2001-11-12 | 2002-01-17 | Jenn Feng Ind Co | Vorrichtung zur Einstellung der Spannung einer Kettensäge |
| EP1637299B1 (en) * | 2003-05-20 | 2009-02-25 | Husqvarna Zenoah Co., Ltd. | Auto chain tensioner |
| US6877233B1 (en) * | 2004-01-08 | 2005-04-12 | Electrolux Home Products, Inc. | Chain saw adjuster mechanism with locking teeth |
| US6878888B1 (en) * | 2004-03-24 | 2005-04-12 | Jenn Peng Industrial Co., Ltd. | Safety device for activating electric tools |
| US7434502B2 (en) * | 2004-07-21 | 2008-10-14 | Husqvarna Outdoor Products Inc. | Bar knob with cam-operated locking mechanism |
| US7107689B2 (en) * | 2004-10-08 | 2006-09-19 | Husqvarna Outdoor Products Inc. | Bar knob with integrated lock |
| US7350301B2 (en) * | 2005-08-25 | 2008-04-01 | Hsin-Chih Chung Lee | Tension-adjusting device for a chain in chain saw |
| US20070062361A1 (en) * | 2005-09-16 | 2007-03-22 | Wei Xiong | Chainsaw tensioner |
| DE102006035744B4 (de) | 2006-07-28 | 2010-12-16 | Circle Gmbh Engineering Solutions | Vorrichtung zum automatischen Spannen einer Kette einer einen Kettenantrieb aufweisenden Kettensäge |
| JP4898354B2 (ja) * | 2006-08-30 | 2012-03-14 | 株式会社マキタ | チェーンソー |
| US7743513B1 (en) * | 2006-10-31 | 2010-06-29 | Mtd Products Inc | Chainsaw tensioning device |
| US7676934B2 (en) * | 2006-12-19 | 2010-03-16 | Hsin-Chih Chung Lee | Keyless adjusting mechanism for chain saw |
| FR2912949B1 (fr) * | 2007-02-26 | 2009-04-24 | Pellenc Sa | Scie a chaine munie d'un dispositif de reglage de la tension de la chaine de coupe |
| FR2913076B1 (fr) * | 2007-02-26 | 2010-10-22 | Pellenc Sa | Dispositif de serrage a bras de manoeuvre escamotable et appareils en comportant application |
| GB2452768A (en) * | 2007-09-14 | 2009-03-18 | Husqvarna Ab | Chainsaw with tension adjusting knob and clutch arrangement |
| US20090241353A1 (en) * | 2008-04-01 | 2009-10-01 | Scott William Ericson | Toolless Apparatus for Guide Bar for Chain Saw |
| WO2010005485A1 (en) * | 2008-06-24 | 2010-01-14 | Mtd Products Inc | Torque-limited chain tensioning for power tools |
| CN101670596B (zh) * | 2008-09-10 | 2015-04-22 | 苏州宝时得电动工具有限公司 | 链锯 |
| US9878463B2 (en) * | 2008-12-16 | 2018-01-30 | Positec Power Tools (Suzhou) Co., Ltd | Chain saw |
| US20110314682A1 (en) * | 2009-03-18 | 2011-12-29 | Markus Maag | Quick-tightening device for a chain saw and chain unit for same |
| CN201399805Y (zh) * | 2009-03-27 | 2010-02-10 | 浙江博大电器有限公司 | 手提式电链锯 |
| JP5314496B2 (ja) * | 2009-05-20 | 2013-10-16 | 株式会社マキタ | チェーンソー |
| JP5396149B2 (ja) * | 2009-05-20 | 2014-01-22 | 株式会社マキタ | 動力工具 |
| GB2481038A (en) | 2010-06-09 | 2011-12-14 | Richard John Olley | Chain Tensioning Device with Easy Removal of Guide Bar |
| US20120036725A1 (en) * | 2010-08-11 | 2012-02-16 | Blount, Inc. | Kickback detection method and apparatus |
| WO2012126501A1 (en) * | 2011-03-18 | 2012-09-27 | Husqvarna Ab | Chainsaw with guide bar clamping and chain tensioning assembly |
| US9132568B2 (en) * | 2011-10-11 | 2015-09-15 | Echo, Inc. | Chainsaw with cutting chain tensioner |
| JP5962082B2 (ja) * | 2012-03-14 | 2016-08-03 | 日立工機株式会社 | チェーンソー |
| WO2013184105A1 (en) * | 2012-06-06 | 2013-12-12 | Husqvarna Ab | Feedback system for bar clamping |
| JP6032400B2 (ja) * | 2012-08-15 | 2016-11-30 | 日立工機株式会社 | チェーンソー |
| DE102013003850A1 (de) * | 2013-03-06 | 2014-09-25 | Andreas Stihl Ag & Co. Kg | Handgeführtes Arbeitsgerät mit einer Spannvorrichtung für eine Kette |
| WO2014142722A1 (en) * | 2013-03-15 | 2014-09-18 | Husqvarna Ab | Chainsaw with self-locking knob assembly |
| US9403226B2 (en) * | 2013-03-22 | 2016-08-02 | Chevron (Hk) Limited | Chain saw |
| JP6132626B2 (ja) * | 2013-03-29 | 2017-05-24 | 株式会社マキタ | 携帯作業機 |
| JP6026943B2 (ja) * | 2013-03-29 | 2016-11-16 | 株式会社マキタ | チェンソーのガイドバー締結装置 |
| JP6360658B2 (ja) * | 2013-03-29 | 2018-07-18 | 株式会社マキタ | チェンソーのチェーン張力調整装置 |
| US9669563B2 (en) * | 2015-05-26 | 2017-06-06 | Jenn Feng New Energy Co., Ltd. | Chain saw with tool-free chain tension adjustment mechanism |
| CN106466736B (zh) * | 2015-08-14 | 2019-01-04 | 南京德朔实业有限公司 | 动力工具 |
-
2013
- 2013-03-06 DE DE102013003850.2A patent/DE102013003850A1/de not_active Withdrawn
-
2014
- 2014-02-18 BR BR102014003710-1A patent/BR102014003710A2/pt not_active IP Right Cessation
- 2014-02-27 RU RU2014107353/13A patent/RU2014107353A/ru not_active Application Discontinuation
- 2014-03-01 EP EP14000735.2A patent/EP2774733A1/de not_active Withdrawn
- 2014-03-04 JP JP2014041497A patent/JP2014172397A/ja active Pending
- 2014-03-05 US US14/198,234 patent/US9713881B2/en not_active Expired - Fee Related
- 2014-03-06 CN CN201410080063.2A patent/CN104308261B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| BR102014003710A2 (pt) | 2014-12-30 |
| EP2774733A1 (de) | 2014-09-10 |
| US9713881B2 (en) | 2017-07-25 |
| US20140250702A1 (en) | 2014-09-11 |
| RU2014107353A (ru) | 2015-09-10 |
| CN104308261B (zh) | 2018-01-02 |
| CN104308261A (zh) | 2015-01-28 |
| DE102013003850A1 (de) | 2014-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014172397A (ja) | チェーン張設装置を備えた手で操縦される作業機 | |
| CN102748433B (zh) | 电动工具的变速传动装置 | |
| US5522143A (en) | Tensioning arrangement for a saw chain of a motor-driven chain saw | |
| JP4394548B2 (ja) | 無張力パワー・ラチェット・レンチ・アセンブリ | |
| JP6026943B2 (ja) | チェンソーのガイドバー締結装置 | |
| US20130291693A1 (en) | Torque control wrench assembly for a vehicle | |
| JP7101757B2 (ja) | 高速締付装置、工作機械、及び、工作機械システム | |
| EP2366513B1 (en) | Chain saw | |
| KR20080006600A (ko) | 폴 어셈블리 | |
| TWI574598B (zh) | 具有快拆功能的固定機構及其相關電子裝置 | |
| EP3954513A1 (en) | Chain saw | |
| JP3164090U (ja) | 単一方向の振動及び回転動力を出力する装置 | |
| KR100220218B1 (ko) | 풀림방지 너트 및 볼트 | |
| KR101920677B1 (ko) | 전자식 주차 브레이크장치 | |
| KR101362478B1 (ko) | 볼트 공전방지 수단을 구비한 라체트 렌치 | |
| RU2502589C2 (ru) | Ручная машина, прежде всего угловая шлифовальная машина | |
| KR20020055799A (ko) | 일방향 잠금 나사 | |
| JP5271836B2 (ja) | バンド用留め具 | |
| JP4308435B2 (ja) | ロッド状アンテナを固定するための装置 | |
| JP2021085474A (ja) | テンショナレバー | |
| US20120031637A1 (en) | Device for power tool preventing axial vibration in reverse rotation | |
| JP2004003561A (ja) | ケーブルの端末固定装置 | |
| JP3716798B2 (ja) | ねじ締め機 | |
| KR101174862B1 (ko) | 리미트 스위치 구동 캠 | |
| US20110275465A1 (en) | Tensioning Device |