JP2014161392A - 撮影、計測または治療を行う装置およびプログラム - Google Patents
撮影、計測または治療を行う装置およびプログラム Download PDFInfo
- Publication number
- JP2014161392A JP2014161392A JP2013032673A JP2013032673A JP2014161392A JP 2014161392 A JP2014161392 A JP 2014161392A JP 2013032673 A JP2013032673 A JP 2013032673A JP 2013032673 A JP2013032673 A JP 2013032673A JP 2014161392 A JP2014161392 A JP 2014161392A
- Authority
- JP
- Japan
- Prior art keywords
- subject
- image
- depth sensor
- unit
- optical camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000011282 treatment Methods 0.000 title claims abstract description 13
- 238000005259 measurement Methods 0.000 title claims abstract description 10
- 238000012545 processing Methods 0.000 title abstract description 9
- 230000003287 optical effect Effects 0.000 claims abstract description 53
- 238000003384 imaging method Methods 0.000 claims description 46
- 230000005855 radiation Effects 0.000 claims description 6
- 238000003325 tomography Methods 0.000 claims description 5
- 238000002595 magnetic resonance imaging Methods 0.000 claims description 3
- 230000032258 transport Effects 0.000 claims description 2
- 241000791900 Selene vomer Species 0.000 abstract 5
- 240000004050 Pentaglottis sempervirens Species 0.000 description 23
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 23
- 238000000034 method Methods 0.000 description 23
- 238000002360 preparation method Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 238000013480 data collection Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 210000001015 abdomen Anatomy 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000002603 single-photon emission computed tomography Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
Images









Landscapes
- Apparatus For Radiation Diagnosis (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
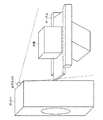
【解決手段】対象40が搬送される空間Bを有し、対象40を撮影/計測/治療する構造体10と、対象40が載置され、対象40を空間Bに搬送するテーブル20と、構造体10に設けられており、テーブル20と対象40を含む被写体60の斜俯瞰画像P0を取得する光学カメラ19cと、カメラ19cの近傍に設置された深度センサ19dであって、深度センサ19dから複数の直線方向βiに沿って被写体60までの距離r(βi)を測定する深度センサ19dと、測定された距離r(βi)に基づいて、斜俯瞰画像P0を構成する各画素P0(βi)が表す被写体部分K(βi)の空間座標を特定する特定手段と、斜俯瞰画像P0と被写体部分K(βi)の空間座標とに基づいて、被写体60の真俯瞰画像P1を生成する生成手段と、を備えた装置を提供する。
【選択図】図6
Description
対象が搬送される空間を有しており、該対象を撮影、計測または治療する構造体と、
前記対象が載置され、該対象を前記空間に搬送するテーブルと、
前記構造体に設けられており、前記テーブルと該テーブルに載置された対象とを含む被写体の斜俯瞰画像を取得する光学カメラと、
前記光学カメラの近傍に設けられている深度センサ(sensor)であって、該深度センサから前記被写体までの距離を、互いに異なる複数の方向に沿って測定する深度センサと、
前記深度センサにより測定された距離に基づいて、前記光学カメラにより取得された斜俯瞰画像を構成する各画素に対応する前記被写体の部分の空間座標を特定する特定手段と、
前記取得された斜俯瞰画像と、前記特定手段により特定された空間座標とに基づいて、前記被写体の真俯瞰画像を生成する生成手段と、を備えた装置を提供する。
前記生成手段により生成された真俯瞰画像を表示する表示部をさらに備えた上記第1の観点の装置を提供する。
前記表示部が、前記構造体に設けられている上記第2の観点の装置を提供する。
前記表示部に表示された真俯瞰画像上にて指定された位置に基づいて、撮影、計測または治療を行う位置または範囲を設定する設定手段をさらに備えた上記第2の観点または第3の観点の装置を提供する。
前記表示部に表示された真俯瞰画像に、前記テーブルの長手方向に延びる中心線を重ねて表示するよう、前記表示部を制御する表示制御手段をさらに備えた上記第2の観点から第4の観点のいずれか一つの観点の装置を提供する。
前記生成手段が、前記被写体の真俯瞰画像のうち、前記被写体の前記光学カメラから見て隠れている部分に相当する画像を、前記テーブルおよび/または前記対象の形状情報に基づいて予測して生成する上記第2の観点から第4の観点のいずれか一つの観点の装置を提供する。
前記生成手段が、前記被写体の真俯瞰画像を、前記テーブルの高さ情報を考慮して生成する上記第1の観点から第6の観点のいずれか一つの観点の装置を提供する。
前記装置が、放射線断層撮影装置または磁気共鳴イメージング(imaging)装置である上記第1の観点から第7の観点のいずれか一つの観点の装置を提供する。
前記深度センサが、赤外線または超音波を用いた3次元深度センサである上記第1の観点から第8の観点のいずれか一つの観点の装置を提供する。
前記光学カメラおよび深度センサが、一体的に構成されている上記第1の観点から第9の観点のいずれか一つの観点の装置を提供する。
コンピュータ(computer)を、上記第1の観点から第10の観点のいずれか一つの観点の装置における特定手段および生成手段として機能させるためのプログラム(program)を提供する。
10 走査ガントリ(構造体)
12 X線管
13 X線管制御部
14 X線検出器
15 データ収集部
16 ガントリ回転駆動部
17 ガントリ・テーブル制御部
18 ガントリディスプレイ部(特定手段、生成手段、表示部、表示制御手段)
19 センサ部
19c 光学カメラ
19d 深度センサ
20 撮影テーブル(テーブル)
21 クレードル
22 テーブル駆動部
30 操作コンソール
31 スキャン条件設定部(設定手段)
32 スキャン制御部
33 画像生成部
34 操作部
35 表示部
39 制御バス
40 被検体(対象)
50 操作者
60 被写体
Claims (11)
- 対象が搬送される空間を有しており、該対象を撮影、計測または治療する構造体と、
前記対象が載置され、該対象を前記空間に搬送するテーブルと、
前記構造体に設けられており、前記テーブルと該テーブルに載置された対象とを含む被写体の斜俯瞰画像を取得する光学カメラと、
前記光学カメラの近傍に設けられている深度センサであって、該深度センサから前記被写体までの距離を、互いに異なる複数の方向に沿って測定する深度センサと、
前記深度センサにより測定された距離に基づいて、前記光学カメラにより取得された斜俯瞰画像を構成する各画素に対応する前記被写体の部分の空間座標を特定する特定手段と、
前記取得された斜俯瞰画像と、前記特定手段により特定された空間座標とに基づいて、前記被写体の真俯瞰画像を生成する生成手段と、を備えた装置。 - 前記生成手段により生成された真俯瞰画像を表示する表示部をさらに備えた請求項1に記載の装置。
- 前記表示部は、前記構造体に設けられている請求項2に記載の装置。
- 前記表示部に表示された真俯瞰画像上にて指定された位置に基づいて、撮影、計測または治療を行う位置または範囲を設定する設定手段をさらに備えた請求項2または請求項3に記載の装置。
- 前記表示部に表示された真俯瞰画像に、前記テーブルの長手方向に延びる中心線を重ねて表示するよう、前記表示部を制御する表示制御手段をさらに備えた請求項2から請求項4のいずれか一項に記載の装置。
- 前記生成手段は、前記被写体の真俯瞰画像のうち、前記被写体の前記光学カメラから見て隠れている部分に相当する画像を、前記テーブルおよび/または前記対象の形状情報に基づいて予測して生成する請求項2から請求項4のいずれか一項に記載の装置。
- 前記生成手段は、前記被写体の真俯瞰画像を、前記テーブルの高さ情報を考慮して生成する請求項1から請求項6のいずれか一項に記載の装置。
- 前記装置は、放射線断層撮影装置または磁気共鳴イメージング装置である請求項1から請求項7のいずれか一項に記載の装置。
- 前記深度センサは、赤外線または超音波を用いた3次元深度センサである請求項1から請求項8のいずれか一項に記載の装置。
- 前記光学カメラおよび深度センサは、一体的に構成されている請求項1から請求項9のいずれか一項に記載の装置。
- コンピュータを、請求項1から請求項10のいずれか一項に記載の装置における特定手段および生成手段として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013032673A JP2014161392A (ja) | 2013-02-22 | 2013-02-22 | 撮影、計測または治療を行う装置およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013032673A JP2014161392A (ja) | 2013-02-22 | 2013-02-22 | 撮影、計測または治療を行う装置およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014161392A true JP2014161392A (ja) | 2014-09-08 |
| JP2014161392A5 JP2014161392A5 (ja) | 2016-02-12 |
Family
ID=51612636
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013032673A Pending JP2014161392A (ja) | 2013-02-22 | 2013-02-22 | 撮影、計測または治療を行う装置およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014161392A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019080834A (ja) * | 2017-10-31 | 2019-05-30 | ゼネラル・エレクトリック・カンパニイ | 医用装置およびプログラム |
| US20190162799A1 (en) * | 2017-11-30 | 2019-05-30 | General Electric Company | Contact avoidance apparatus and medical apparatus |
| JP2019536546A (ja) * | 2016-11-22 | 2019-12-19 | ゼネラル・エレクトリック・カンパニイ | 患者走査設定のための方法およびシステム |
| JP2022179701A (ja) * | 2017-08-08 | 2022-12-02 | キヤノンメディカルシステムズ株式会社 | X線コンピュータ断層撮影装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0626810U (ja) * | 1992-09-11 | 1994-04-12 | 株式会社日立メディコ | Ct撮影用寝台装置 |
| JP2004201977A (ja) * | 2002-12-25 | 2004-07-22 | Ge Medical Systems Global Technology Co Llc | Mri装置 |
| JP2004298213A (ja) * | 2003-03-28 | 2004-10-28 | Ge Medical Systems Global Technology Co Llc | 撮影対象支持装置 |
| JP2011072535A (ja) * | 2009-09-30 | 2011-04-14 | Ge Medical Systems Global Technology Co Llc | 医用画像撮影システム |
| US20110135190A1 (en) * | 2009-12-07 | 2011-06-09 | C-Rad Positioning Ab | Object positioning with visual feedback |
| JP2012055510A (ja) * | 2010-09-09 | 2012-03-22 | Mitsubishi Electric Corp | 皮膚線量表示装置及び皮膚線量表示方法 |
| JP2012101046A (ja) * | 2010-11-09 | 2012-05-31 | Ge Medical Systems Global Technology Co Llc | レーザーガイド医療機器自動位置決めシステム及び方法 |
-
2013
- 2013-02-22 JP JP2013032673A patent/JP2014161392A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0626810U (ja) * | 1992-09-11 | 1994-04-12 | 株式会社日立メディコ | Ct撮影用寝台装置 |
| JP2004201977A (ja) * | 2002-12-25 | 2004-07-22 | Ge Medical Systems Global Technology Co Llc | Mri装置 |
| JP2004298213A (ja) * | 2003-03-28 | 2004-10-28 | Ge Medical Systems Global Technology Co Llc | 撮影対象支持装置 |
| JP2011072535A (ja) * | 2009-09-30 | 2011-04-14 | Ge Medical Systems Global Technology Co Llc | 医用画像撮影システム |
| US20110135190A1 (en) * | 2009-12-07 | 2011-06-09 | C-Rad Positioning Ab | Object positioning with visual feedback |
| JP2012055510A (ja) * | 2010-09-09 | 2012-03-22 | Mitsubishi Electric Corp | 皮膚線量表示装置及び皮膚線量表示方法 |
| JP2012101046A (ja) * | 2010-11-09 | 2012-05-31 | Ge Medical Systems Global Technology Co Llc | レーザーガイド医療機器自動位置決めシステム及び方法 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019536546A (ja) * | 2016-11-22 | 2019-12-19 | ゼネラル・エレクトリック・カンパニイ | 患者走査設定のための方法およびシステム |
| JP2022110067A (ja) * | 2016-11-22 | 2022-07-28 | ゼネラル・エレクトリック・カンパニイ | 患者走査設定のための方法およびシステム |
| JP2022179701A (ja) * | 2017-08-08 | 2022-12-02 | キヤノンメディカルシステムズ株式会社 | X線コンピュータ断層撮影装置 |
| JP7412501B2 (ja) | 2017-08-08 | 2024-01-12 | キヤノンメディカルシステムズ株式会社 | X線コンピュータ断層撮影装置 |
| JP2019080834A (ja) * | 2017-10-31 | 2019-05-30 | ゼネラル・エレクトリック・カンパニイ | 医用装置およびプログラム |
| US20190162799A1 (en) * | 2017-11-30 | 2019-05-30 | General Electric Company | Contact avoidance apparatus and medical apparatus |
| JP2019097775A (ja) * | 2017-11-30 | 2019-06-24 | ゼネラル・エレクトリック・カンパニイ | 接触回避装置、医用装置、およびプログラム |
| US11099248B2 (en) | 2017-11-30 | 2021-08-24 | General Electric Company | Contact avoidance apparatus and medical apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2691320C2 (ru) | Отслеживание движения челюсти | |
| JP2014121364A (ja) | 放射線断層撮影装置およびプログラム | |
| US8750450B2 (en) | Method for producing a dental 3D X-ray image, and X-ray device therefor | |
| JP6514756B1 (ja) | 接触回避装置、医用装置、およびプログラム | |
| JP6525680B2 (ja) | 放射線撮影システム、制御方法およびプログラム | |
| US20090232271A1 (en) | Radiation ct apparatus and radiation ct method | |
| JP2007007255A (ja) | X線ct装置 | |
| KR20050021257A (ko) | 방사선 화상 촬영 장치, 방사선 화상 촬영 시스템, 및방사선 화상 촬영 방법 | |
| JP5442381B2 (ja) | 医用画像撮影システム | |
| US9420985B2 (en) | X-ray diagnostic apparatus and dose distribution generation method | |
| JP2014236798A (ja) | X線診断装置、被曝管理装置、散乱線線量分布形成方法、および散乱線線量分布形成プログラム | |
| JP2014161392A (ja) | 撮影、計測または治療を行う装置およびプログラム | |
| US20190130598A1 (en) | Medical apparatus | |
| JP6970203B2 (ja) | コンピュータ断層撮影および撮像されるべき解剖学的構造の位置決め | |
| JP5985970B2 (ja) | 放射線断層撮影装置およびプログラム | |
| US10485504B2 (en) | Radiographing system for obtaining a dose index from a generated composition image | |
| JP5697970B2 (ja) | X線ct装置 | |
| JP2010057731A (ja) | X線ct装置およびx線ct装置の制御プログラム | |
| JP5356173B2 (ja) | 医用画像撮影システム | |
| JP2004049615A (ja) | 医用画像診断装置の撮影条件設定装置 | |
| JP4697642B2 (ja) | Ct装置 | |
| JP7325943B2 (ja) | 医用画像診断システム及びパラメータ選択方法 | |
| JP2009261505A (ja) | 医用画像撮影システム | |
| JP2002243663A (ja) | X線透視装置 | |
| US11890126B2 (en) | Radiation imaging apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20150525 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161124 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170509 |