JP2014138183A - 荷電粒子ビーム描画方法および荷電粒子ビーム描画装置 - Google Patents
荷電粒子ビーム描画方法および荷電粒子ビーム描画装置 Download PDFInfo
- Publication number
- JP2014138183A JP2014138183A JP2013007820A JP2013007820A JP2014138183A JP 2014138183 A JP2014138183 A JP 2014138183A JP 2013007820 A JP2013007820 A JP 2013007820A JP 2013007820 A JP2013007820 A JP 2013007820A JP 2014138183 A JP2014138183 A JP 2014138183A
- Authority
- JP
- Japan
- Prior art keywords
- deflection
- region
- charged particle
- deflector
- particle beam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Electron Beam Exposure (AREA)
Abstract
【構成】本発明の一態様の描画方法100は、荷電粒子ビームを偏向する偏向器の偏向可能領域の幅のうち描画処理に使用する偏向幅の領域を偏向可能領域内に設定する工程と、所定の計測値がしきい値を超えた場合に偏向幅の領域の位置を偏向可能領域内で移動させながら、偏向器を用いて荷電粒子ビームを偏向することによって試料上にパターンを描画する工程と、を備えたことを特徴とする。
【選択図】図4
Description
可変成形型電子線描画装置は、以下のように動作する。第1のアパーチャ410には、電子線330を成形するための矩形の開口411が形成されている。また、第2のアパーチャ420には、第1のアパーチャ410の開口411を通過した電子線330を所望の矩形形状に成形するための可変成形開口421が形成されている。荷電粒子ソース430から照射され、第1のアパーチャ410の開口411を通過した電子線330は、偏向器により偏向され、第2のアパーチャ420の可変成形開口421の一部を通過して、所定の一方向(例えば、X方向とする)に連続的に移動するステージ上に搭載された試料340に照射される。すなわち、第1のアパーチャ410の開口411と第2のアパーチャ420の可変成形開口421との両方を通過できる矩形形状が、X方向に連続的に移動するステージ上に搭載された試料340の描画領域に描画される。第1のアパーチャ410の開口411と第2のアパーチャ420の可変成形開口421との両方を通過させ、任意形状を作成する方式を可変成形方式(VSB方式)という。
荷電粒子ビームを偏向する偏向器の偏向可能領域の幅のうち描画処理に使用する偏向幅の領域を偏向可能領域内に設定する工程と、
所定の計測値がしきい値を超えた場合に偏向幅の領域の位置を偏向可能領域内で移動させながら、偏向器を用いて荷電粒子ビームを偏向することによって試料上にパターンを描画する工程と、
を備えたことを特徴とする。
ストライプ領域単位で偏向幅の領域の位置を偏向可能領域内で移動させると好適である。
荷電粒子ビームを偏向する偏向器の偏向可能領域の幅のうち、描画処理を行う際に使用する偏向幅の領域を偏向可能領域内に設定する設定部と、
荷電粒子ビームのショット数を計測する計測部と、
計測されたショット数がしきい値を超えたかどうかを判定する判定部と、
ショット数がしきい値を超えた場合に、偏向幅の領域の位置を偏向可能領域内で移動させる移動処理部と、
偏向器を用いて荷電粒子ビームを、設定されている位置での偏向幅の領域内で偏向することによって試料上にパターンを描画する描画部と、
を備えたことを特徴とする。
図1は、実施の形態1における描画装置の構成を示す概念図である。図1において、描画装置100は、描画部150と制御部160を備えている。描画装置100は、荷電粒子ビーム描画装置の一例である。特に、可変成形型の描画装置の一例である。描画部150は、電子鏡筒102と描画室103を備えている。電子鏡筒102内には、電子銃201、照明レンズ202、ブランキング偏向器212、ブランキングアパーチャ214、第1のアパーチャ203、投影レンズ204、偏向器205、第2のアパーチャ206、対物レンズ207、主偏向器208及び副偏向器209が配置されている。描画室103内には、XYステージ105が配置される。XYステージ105上には、描画時には描画対象となるマスク等の試料101が配置される。試料101には、半導体装置を製造する際の露光用マスクが含まれる。また、試料101には、レジストが塗布された、まだ何も描画されていないマスクブランクスが含まれる。
L0/n≧L1>L0/(n+1)
を満たし、かつ、n≧”分割数の閾値”となるような自然数nで分割する。例えば、分割数の閾値を4とする。また、L0は100μmとする。L1が仮に18μmとすると、n=5は、
100/5≧18>100/(5+1)を満たす。さらに、n=5は、n>4(閾値)を満たすので、5分割とする。よって、かかる分割を行う場合には、偏向幅設定工程(S102)において偏向幅L1を設定する際に、L1は20μmと設定されると好適である。なお、上述した条件を満たす分割数が存在しない場合には、後述する移動手法を実施すればよい。
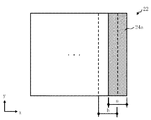
そして、移動処理部78は、図5に示すように、例えば、主偏向可能領域22の右端部からa,b,c,d,e・・・と描画方向と逆の方向(−x方向)に向かって偏向枠24を順に移動させる(直前の偏向枠と異なる偏向枠に移動させる)。或いは、主偏向可能領域22の左端部からe,d,c,b,a・・・と描画方向と同じ方向(x方向)に向かって偏向枠24を順に移動させてもよい。或いは、ランダムに偏向枠24を順に移動させてもよい。
20 ストライプ領域
22 主偏向可能領域
24 偏向枠
30 SF
52,54,56 ショット図形
60 描画データ処理部
62 描画制御部
64 偏向幅設定部
70 偏向制御部
72 設定部
74 計測部
76 判定部
78 移動処理部
100 描画装置
101,340 試料
102 電子鏡筒
103 描画室
105 XYステージ
110 制御計算機
111 メモリ
120 偏向制御回路
130,132 DACアンプ
140,142,144 記憶装置
150 描画部
160 制御部
200 電子ビーム
201 電子銃
202 照明レンズ
203,410 第1のアパーチャ
204 投影レンズ
205 偏向器
206,420 第2のアパーチャ
207 対物レンズ
208 主偏向器
209 副偏向器
212 ブランキング偏向器
214 ブランキングアパーチャ
330 電子線
411 開口
421 可変成形開口
430 荷電粒子ソース
Claims (5)
- 荷電粒子ビームを偏向する偏向器の偏向可能領域の幅のうち描画処理に使用する偏向幅の領域を前記偏向可能領域内に設定する工程と、
所定の計測値がしきい値を超えた場合に前記偏向幅の領域の位置を前記偏向可能領域内で移動させながら、前記偏向器を用いて荷電粒子ビームを偏向することによって試料上にパターンを描画する工程と、
を備えたことを特徴とする荷電粒子ビーム描画方法。 - 前記所定の計測値として前記荷電粒子ビームのショット数が用いられ、
前記荷電粒子ビームのショット数がしきい値を超えた場合に、前記偏向幅の領域の位置を前記偏向可能領域内で移動させることを特徴とする請求項1記載の荷電粒子ビーム描画方法。 - 前記所定の計測値として前記描画処理を開始後の描画時間が用いられ、
前記描画時間がしきい値を超えた場合に、前記偏向幅の領域の位置を前記偏向可能領域内で移動させることを特徴とする請求項1記載の荷電粒子ビーム描画方法。 - 前記試料の描画領域は、短冊上の複数のストライプ領域に仮想分割され、
前記ストライプ領域単位で前記偏向幅の領域の位置を前記偏向可能領域内で移動させることを特徴とする請求項1〜3いずれか記載の荷電粒子ビーム描画方法。 - 荷電粒子ビームを偏向する偏向器の偏向可能領域の幅のうち、描画処理を行う際に使用する偏向幅の領域を前記偏向可能領域内に設定する設定部と、
前記荷電粒子ビームのショット数を計測する計測部と、
計測されたショット数がしきい値を超えたかどうかを判定する判定部と、
前記ショット数がしきい値を超えた場合に、前記偏向幅の領域の位置を前記偏向可能領域内で移動させる移動処理部と、
前記偏向器を用いて荷電粒子ビームを、設定されている位置での前記偏向幅の領域内で偏向することによって試料上にパターンを描画する描画部と、
を備えたことを特徴とする荷電粒子ビーム描画装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013007820A JP6174862B2 (ja) | 2013-01-18 | 2013-01-18 | 荷電粒子ビーム描画方法および荷電粒子ビーム描画装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013007820A JP6174862B2 (ja) | 2013-01-18 | 2013-01-18 | 荷電粒子ビーム描画方法および荷電粒子ビーム描画装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014138183A true JP2014138183A (ja) | 2014-07-28 |
| JP6174862B2 JP6174862B2 (ja) | 2017-08-02 |
Family
ID=51415503
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013007820A Active JP6174862B2 (ja) | 2013-01-18 | 2013-01-18 | 荷電粒子ビーム描画方法および荷電粒子ビーム描画装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6174862B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018073978A (ja) * | 2016-10-28 | 2018-05-10 | 株式会社ニューフレアテクノロジー | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5691445U (ja) * | 1979-12-17 | 1981-07-21 | ||
| JPS5748230A (en) * | 1980-09-04 | 1982-03-19 | Jeol Ltd | Electron ray exposure |
| JPS61164222A (ja) * | 1985-01-16 | 1986-07-24 | Fujitsu Ltd | 電子ビ−ム露光方法 |
| JPH05267144A (ja) * | 1992-03-24 | 1993-10-15 | Hitachi Ltd | 電子線描画装置 |
| JPH06196394A (ja) * | 1992-09-30 | 1994-07-15 | Hitachi Ltd | 電子線描画装置 |
| JPH09306803A (ja) * | 1996-05-10 | 1997-11-28 | Toshiba Corp | 荷電粒子ビーム装置およびその洗浄方法 |
| JP2012069661A (ja) * | 2010-09-22 | 2012-04-05 | Nuflare Technology Inc | 荷電粒子ビーム描画装置および荷電粒子ビーム描画方法 |
-
2013
- 2013-01-18 JP JP2013007820A patent/JP6174862B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5691445U (ja) * | 1979-12-17 | 1981-07-21 | ||
| JPS5748230A (en) * | 1980-09-04 | 1982-03-19 | Jeol Ltd | Electron ray exposure |
| JPS61164222A (ja) * | 1985-01-16 | 1986-07-24 | Fujitsu Ltd | 電子ビ−ム露光方法 |
| JPH05267144A (ja) * | 1992-03-24 | 1993-10-15 | Hitachi Ltd | 電子線描画装置 |
| JPH06196394A (ja) * | 1992-09-30 | 1994-07-15 | Hitachi Ltd | 電子線描画装置 |
| JPH09306803A (ja) * | 1996-05-10 | 1997-11-28 | Toshiba Corp | 荷電粒子ビーム装置およびその洗浄方法 |
| JP2012069661A (ja) * | 2010-09-22 | 2012-04-05 | Nuflare Technology Inc | 荷電粒子ビーム描画装置および荷電粒子ビーム描画方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018073978A (ja) * | 2016-10-28 | 2018-05-10 | 株式会社ニューフレアテクノロジー | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6174862B2 (ja) | 2017-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4945380B2 (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 | |
| JP6545437B2 (ja) | マルチ荷電粒子ビーム描画装置及びマルチ荷電粒子ビーム描画方法 | |
| JP6057797B2 (ja) | セトリング時間の取得方法 | |
| JP5616674B2 (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 | |
| KR101621784B1 (ko) | 하전 입자 빔 묘화 장치 및 하전 입자 빔 묘화 방법 | |
| JP6285660B2 (ja) | 荷電粒子ビーム描画方法、および荷電粒子ビーム描画装置 | |
| JP5607413B2 (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 | |
| TWI457970B (zh) | Charge particle beam drawing device and charged particle beam drawing method | |
| CN112020761A (zh) | 带电粒子束描绘装置以及带电粒子束描绘方法 | |
| JP2016100445A (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 | |
| JP6322011B2 (ja) | 荷電粒子ビームのドリフト補正方法及び荷電粒子ビーム描画装置 | |
| JP6262007B2 (ja) | セトリング時間の取得方法 | |
| JP2019134093A (ja) | 荷電粒子ビーム描画方法及び荷電粒子ビーム描画装置 | |
| JP2011100818A (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 | |
| JP6174862B2 (ja) | 荷電粒子ビーム描画方法および荷電粒子ビーム描画装置 | |
| JP2018073978A (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 | |
| JP5758325B2 (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 | |
| JP6294758B2 (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビームのドーズ量異常検出方法 | |
| JP6039970B2 (ja) | セトリング時間の設定方法、荷電粒子ビーム描画方法、および荷電粒子ビーム描画装置 | |
| JP6590542B2 (ja) | 荷電粒子ビーム描画方法及び荷電粒子ビーム描画装置 | |
| KR102675531B1 (ko) | 하전 입자 빔 묘화 장치, 하전 입자 빔 묘화 방법 및 기록 매체 | |
| JP6478782B2 (ja) | ビームドリフト量の測定方法 | |
| JP2014038945A (ja) | ビームドリフトの補正間隔パターンの設定方法、荷電粒子ビーム描画装置の部品メンテナンスの実施時期判定方法、及び荷電粒子ビーム描画装置 | |
| JP2013115373A (ja) | 荷電粒子ビーム描画装置および荷電粒子ビーム描画方法 | |
| JP5687838B2 (ja) | 荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160823 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170707 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6174862 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |