JP2014091632A - アウトリガパッド監視装置 - Google Patents
アウトリガパッド監視装置 Download PDFInfo
- Publication number
- JP2014091632A JP2014091632A JP2013223017A JP2013223017A JP2014091632A JP 2014091632 A JP2014091632 A JP 2014091632A JP 2013223017 A JP2013223017 A JP 2013223017A JP 2013223017 A JP2013223017 A JP 2013223017A JP 2014091632 A JP2014091632 A JP 2014091632A
- Authority
- JP
- Japan
- Prior art keywords
- crane
- outrigger
- pad
- function
- reaction force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
- B66C23/78—Supports, e.g. outriggers, for mobile cranes
- B66C23/80—Supports, e.g. outriggers, for mobile cranes hydraulically actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
- B66C23/78—Supports, e.g. outriggers, for mobile cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
- B66C23/905—Devices for indicating or limiting lifting moment electrical
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Jib Cranes (AREA)
- Control And Safety Of Cranes (AREA)
Abstract
【解決手段】 クレーンの安定性を判定するためのアウトリガパッド監視装置は、複数のアウトリガを備えており、該複数のアウトリガは、これらのアウトリガにかかる荷重を測定するセンサーを備えている。クレーン制御装置が、測定されたアウトリガ上荷重を使用してクレーンの安定性を判定する。クレーン制御装置は、アウトリガ上の荷重をクレーンブームの位置情報と共に使用して、クレーンブームが側方から荷重がかかった状態にあるか否かを判定する。該アウトリガパッド監視装置は、クレーンの設置中に、定格容量制限装置の適正な作動を確認するために使用しても良い。
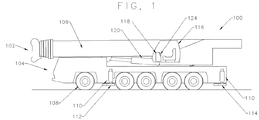
【選択図】 図1
Description

式中、
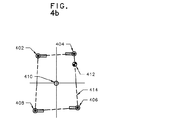
l=アウトリガビーム伸長距離422であり、
L=上部旋回体の回転軸線410からアウトリガビームアセンブリまでの長手方向距離420(この値は、特定のクレーンの製造に基づく固定の値である)であり、
θ=クレーンブームの振れ角418である。
この計算を行うための各アウトリガパッドについての適当なクレーンブームの振れ角418は、移動式クレーン100の標準化された構造又は動作を使用すること(例えば、上部旋回体ユニット102に対するカウンタウエイト及びクレーンのブームの位置を固定すること)、及び次いで上部旋回体ユニット102をキャリアユニット04上で一回転させることによって決定される。回転軸線410と合致していない水平方向の重心を生じさせるために選択されるこの標準化された形状においては、アウトリガパッドの荷重は、クレーンブームが特定のアウトリガパッドの真上で揺動されるときに最大値に達するはずであり、この位置でのこの振れ角はアウトリガビームの伸長距離422を計算するための値として使用される。この標準化された構造及び動作によってRCLのための限界状態を作ることができる。RCL内での監視及び記録は、RCLが作動せしめられる度毎に標準化された構造及び動作がなされたか否かを判定する。この操作がなされたとRCLによって判定されるまで、移動式クレーン100の動作は制限されるか又は阻止される。
102 上部旋回体ユニット、
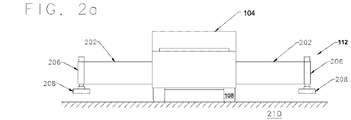
104 キャリアユニット、
106 伸縮式ブーム、
108 タイヤ、
110 アウトリガ装置、
112 前方アウトリガ、
114 後方アウトリガ、
116 運転室、
118 クレーン制御装置、
120 油圧シリンダ、
124 コンピュータディスプレイ、
202 アウトリガビーム、
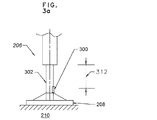
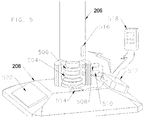
206 アウトリガジャッキ、
208 アウトリガパッド、
210 ベース面、
300 荷重センサー、
302 脚部、
402 第一のアウトリガパッド、
404 第二のアウトリガパッド、
406 第三のアウトリガパッド、
408 第四のアウトリガパッド、
410 旋回中心、
412 水平方向の重心、
414 傾斜面、
416 重心の振れ角、
418 クレーンブームの振れ角、
420 長手方向距離、
424 長手方向距離の変化、
504 第一のリング、
506 第二のリング、
508 近接センサー、
510 近接センサー、
512 無線データプロセッサ、
514 歪みゲージ、
516 無線タグ装置、
518 携帯機器、
520 ソーラーパネル、
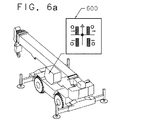
600 運転室ディスプレイ、
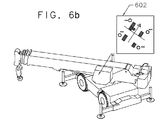
602 ディスプレイ、
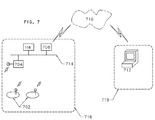
704 受信器、
708 テレマティック制御ユニット、
710 グローバル・データ・インフラストラクチャ、
712 遠隔データ装置、
714 バス、
716 電子装置、
718 遠隔設置装置、
Claims (26)
- アウトリガパッド監視装置を備えているクレーンであり、
a)クレーン本体と、
b)該クレーン本体に取り付けられている複数のアウトリガアセンブリであって、該複数のアウトリガアセンブリの各々が、
i)前記クレーン本体に結合されているアウトリガ本体と、
ii)該アウトリガ本体に結合されており且つ該アウトリガ本体に対して選択的に伸長したり短縮したりする構造とされている、アウトリガジャッキと、
iii)該アウトリガジャッキに結合されているアウトリガパッドと、
iv)センサーであって、前記アウトリガパッドに作用する反作用力を判定するために用いられる特性を測定するようになされているセンサーと、
を備えている前記複数のアウトリガアセンブリと、
c)前記複数のアウトリガアセンブリの前記センサーの各々に通信可能に接続されているクレーン制御装置とを備え、
前記クレーン制御装置が、
i)プロセッサと、
ii)ユーザー入力機器と、
iii)当該クレーン制御装置に設置機能を実行させる命令が記憶されているコンピュータ読み取り記憶メモリと、を備え、
前記設置機能が、
A)前記ユーザー入力機器を介してユーザー入力を受け取る機能と、
B)第一のアウトリガジャッキを前記アウトリガ本体に対して伸長させる機能と、
C)前記センサーのうちの第一のセンサーから信号を受け取る機能であって、前記アウトリガパッドのうちの第一のアウトリガパッドに作用する第一の反作用力を判定するために用いられる特性の前記信号を受け取る機能と、
D)前記第一のアウトリガパッドについての第一のアウトリガパッドの状態を判定する機能と、を含んでいる、ことを特徴とするクレーン。 - 請求項1に記載のクレーンであり、
前記設置機能が更に、
a)各アウトリガジャッキを前記アウトリガ本体に対して伸長させる機能と、
b)各センサーから、各アウトリガパッドに作用している各反作用力の表示を受け取る機能と、
c)前記アウトリガパッドの各々についての各アウトリガパッドの状態を判定する機能と、を含んでいることを特徴とするクレーン。 - 請求項1又は2に記載のクレーンであり、
前記クレーン制御装置に作動可能に接続されているテレマティックスユニットを更に備えており、該テレマティックスユニットは遠隔装置と通信できるようになされている、ことを特徴とするクレーン。 - 請求項3に記載のクレーンであり、
前記テレマティックスユニットにグローバル・データ・インフラストラクチュアを介して作動可能に接続されるようになされている遠隔装置、を更に備えていることを特徴とするクレーン。 - 請求項4に記載のクレーンであり、
前記グローバル・データ・インフラストラクチュアが、ネットワーク、衛星ネットワーク、及びセルラーネットワークからなる群から選択されたものである、クレーン。 - 請求項1〜5のうちのいずれか一項に記載のクレーンであり、
第一のアウトリガパッドの状態を判定する機能が、前記反作用力を記憶されている値と比較することを含んでいる、ことを特徴とするクレーン。 - 請求項1〜6のうちのいずれか一項に記載のクレーンであり、前記記憶されている値がクレーンの重量の分率である、ことを特徴とするクレーン。
- 請求項2〜7のうちのいずれか一項に記載のクレーンであり、
前記設置機能が更に、反作用力の合計を計算すること、及び各アウトリガパッドについての各反作用力を前記合計の反作用力の少なくとも一部と比較すること、を含んでいるクレーン。 - 請求項1〜8のうちのいずれか一項に記載のクレーンであり、
前記複数のアウトリガアセンブリが4つのアウトリガアセンブリからなる、ことを特徴とするクレーン。 - 請求項1〜9のうちのいずれか一項に記載のクレーンであり、
前記アウトリガパッドの状態が、a)硬い地面上、b)空気中、及びc)不安定な地面上、からなる群から選択された状態である、ことを特徴とするクレーン。 - 請求項1〜10のうちのいずれか一項に記載のクレーンであり、
前記クレーン制御装置が、前記センサーのうちの少なくとも1つに無線接続によって通信可能に接続されている、ことを特徴とするクレーン。 - クレーンであり、
a)クレーン本体と、
b)該クレーン本体に取り付けられているクレーンブームと、
c)前記クレーン本体に取り付けられている複数のアウトリガアセンブリであって、各々が、
i)前記クレーン本体に結合されているアウトリガ本体と、
ii)該アウトリガ本体に結合されており、該アウトリガ本体に対して選択的に伸長したり短縮したりできる構造とされているアウトリガジャッキと、
iii)該アウトリガジャッキに結合されているアウトリガパッドと、
iv)前記アウトリガパッドに作用する反作用力が判定できる元になる特性を測定するようになされているセンサーと、
を備えている前記複数のアウトリガアセンブリと、
d)前記センサーの各々に通信可能に接続されているクレーン制御装置であって、
i)プロセッサと、
ii)前記クレーン制御装置に複数の機能を実行させる命令が記憶されているコンピュータ読み取り記憶メモリと、
を備えている前記クレーン制御装置と、
を備え、
前記複数の機能が、
A)各アウトリガパッドに対する理論的反作用力を計算する機能と、
B)各センサーから、各アウトリガパッドに対する反作用力を判定できる元になる信号を受け取る機能と、
C)各アウトリガパッドに対する前記理論的反作用力を、各アウトリガパッドにおいて測定された反作用力と比較する機能と、
D)前記理論的反作用力と前記測定された反作用力との比較に基づいて前記クレーンの安定性を判定する機能と、を含んでいる、ことを特徴とするクレーン。 - 請求項12に記載のクレーンであり、
a)前記クレーンのブームの位置を判定し、
b)前記アウトリガパッドの各々の位置を判定し、
c)前記クレーンブームにかかるクレーン荷重をし、
d)前記クレーンと前記クレーン荷重との重心を計算し、
e)前記重心と前記アウトリガパッドの各々の位置とに基づいて、各アウトリガパッドについての理論的反作用力を計算するようにしたことを特徴とするクレーン。 - 請求項12又は13に記載のクレーンであり、
前記クレーン制御装置が、前記センサーのうちの少なくとも1つに、無線接続によって通信可能に接続されている、ことを特徴とするクレーン。 - クレーンであり、
a)クレーン本体と、
b)該クレーン本体に取り付けられているクレーンのブームと、
c)前記クレーン本体に取り付けられている複数のアウトリガアセンブリであって、該複数のアウトリガアセンブリの各々が、
i)前記クレーン本体に結合されているアウトリガ本体と、
ii)該アウトリガ本体に結合されており、該アウトリガ本体に対して選択的に伸長したり短縮したりする構造とされているアウトリガジャッキと、
iii)該アウトリガジャッキに結合されているアウトリガパッドと、
iv)前記アウトリガパッド上で測定された反作用力が判定できる元になる特性を測定するようになされているセンサーと、を備えている前記複数のアウトリガアセンブリと、
d)前記センサーの各々に通信可能に接続されているクレーン制御装置であって、
i)プロセッサと、
ii)前記クレーン制御装置に複数の機能を実行させる命令が記憶されているコンピュータ読み取り可能記憶メモリと、を備えているクレーン制御装置と、
を備え、
前記複数の機能が、
A)各センサーから、前記各アウトリガパッドにおける前記測定された反作用力が判定できる元になる信号を受け取る機能と、
B)前記アウトリガパッドの各々の位置を判定する機能と、
C)各アウトリガパッドの前記測定された反作用力及び位置に基づいて第一の重心を計算する機能と、
D)前記クレーンブームの位置を判定する機能と、
E)前記クレーンブーム上のクレーン荷重を判定する機能と、
F)前記クレーンブームの位置と前記クレーン荷重とに基づいて第二の重心を計算する機能と、
G)前記第一の重心を前記第二の重心と比較する機能と、
H)前記第一の重心と第二の重心との前記比較に基づいてクレーンの安定性を判定する機能と、を含んでいる前記コンピュータ読み取り記憶メモリと
を備えていることを特徴とするクレーン。 - 請求項15に記載のクレーンであり、
前記プロセッサに作動可能に接続されているディスプレイを更に備えており、前記複数の機能が更に、前記プロセッサに、第一の重心の図形表示を表示するための信号を前記ディスプレイに向けて出力させる機能を含んでいる、ことを特徴とするクレーン。 - 請求項15に記載のクレーンであり、
前記プロセッサに作動可能に接続されているディスプレイを更に備えており、
前記複数の機能が更に、前記プロセッサに、少なくとも1つのアウトリガパッドの反作用力の図形表示を表示するための信号を前記ディスプレイに向けて出力させる機能を含んでいる、ことを特徴とするクレーン。 - 請求項17に記載のクレーンであり、
少なくとも1つのアウトリガパッドの反作用力の図形表示が、複数のアウトリガパッドにおける複数の反作用力の図形表示の分類されたリストからなる、ことを特徴とするクレーン。 - 請求項17に記載のクレーンであり、
前記プロセッサに、前記第一の重心の図形表示を表示させるための信号を前記ディスプレイに向けて出力させる前記機能が、前記クレーンブームの回転に応答して前記第一の重心の図形表示を回転させることを更に含んでいる、ことを特徴とするクレーン。 - 請求項15〜19のうちのいずれか一項に記載のクレームであり、
クレーンの安定性を判定する前記機能がクレーン安全装置の動作を確認する機能を含んでいる、ことを特徴とするクレーン。 - 請求項15に記載のクレーンであり、
前記クレーンの安定性を判定する機能がクレーンのブームの側方荷重を判定することを含んでいる、ことを特徴とするクレーン。 - 請求項15〜21のうちのいずれか一項に記載のクレーンであり、
前記クレーン制御装置が、前記センサーのうちの少なくとも1つに無線接続によって通信可能に接続されている、ことを特徴とするクレーン。 - クレーンのアウトリガパッドの歪み監視装置であり、
a)クレーンのアウトリガパッド内の歪みを判定し且つ該歪みを表す歪み信号を出力するようになされた歪みゲージと、
b)該歪みゲージに作動可能に接続されていて前記歪み信号を受け取るデータプロセッサと、
c)該データプロセッサに作動可能に接続されており且つ該クレーンのアウトリガパッドの歪み監視装置に関連付けられたアウトリガパッドを特定するようになされているセンサーと、
を備えている、ことを特徴とするクレーンのアウトリガパッドの歪み監視装置。 - 請求項23に記載のクレーンのアウトリガパッドの歪み監視装置であり、
前記アウトリガパッドに結合されており且つアウトリガパッドの配置を特定するデータを記憶する無線自動識別装置を更に備えており、前記センサーが前記無線自動識別タグを検知する、ことを特徴とするクレーンのアウトリガパッドの歪み監視装置。 - 請求項23〜24のうちのいずれか一項に記載のクレーンのアウトリガパッドの歪み監視装置であり、
前記データプロセッサに作動可能に接続されている外部電源を更に備えており、該外部電源はソーラーパネルを備えている、ことを特徴とするクレーンのアウトリガパッドの歪み監視装置。 - 請求項23〜25のうちのいずれか一項に記載のクレーンのアウトリガパッドの歪み監視装置であり、
前記センサーが前記アウトリガパッドの物理的特性を検知する、ことを特徴とするクレーンのアウトリガパッドの歪み監視装置。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261720486P | 2012-10-31 | 2012-10-31 | |
| US61/720,486 | 2012-10-31 | ||
| US13/828,127 US9365398B2 (en) | 2012-10-31 | 2013-03-14 | Outrigger pad monitoring system |
| US13/828,127 | 2013-03-14 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014091632A true JP2014091632A (ja) | 2014-05-19 |
| JP2014091632A5 JP2014091632A5 (ja) | 2016-12-08 |
Family
ID=49513731
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013223017A Pending JP2014091632A (ja) | 2012-10-31 | 2013-10-28 | アウトリガパッド監視装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9365398B2 (ja) |
| EP (1) | EP2727876B1 (ja) |
| JP (1) | JP2014091632A (ja) |
| CN (1) | CN103787215B (ja) |
| BR (1) | BR102013028003A2 (ja) |
| RU (1) | RU2013148387A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101759899B1 (ko) * | 2016-02-29 | 2017-07-21 | 장하영 | 특장차 탑재형 아웃리거 장치 |
| US20210276840A1 (en) * | 2018-11-21 | 2021-09-09 | Alexander Dangel | Crane and method for monitoring the operation of such a crane |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8869733B2 (en) * | 2010-06-04 | 2014-10-28 | The Southern Company | Outrigger protection systems and methods |
| AT13517U1 (de) * | 2012-10-19 | 2014-02-15 | Palfinger Ag | Sicherheitseinrichtung für einen Kran |
| EP2799386B1 (de) * | 2013-05-03 | 2016-11-09 | Manitowoc Crane Group France SAS | Vorrichtung und Verfahren zur Ermittlung und Überwachung eines gerüsteten Gegengewichts an einem Kran |
| FI126436B (fi) * | 2013-08-23 | 2016-11-30 | Konecranes Global Oy | Käyttäjän oikeuksien hallinta nosturin yhteydessä |
| US10766748B2 (en) * | 2014-09-11 | 2020-09-08 | Jacques Tranchero | Crane for lifting and transporting loads comprising a roll-over protection system |
| EP3034455B1 (en) * | 2014-12-18 | 2017-08-23 | Iveco Magirus Ag | Method for controlling an aerial apparatus, and aerial apparatus with controller implementing this method |
| DE102015003177A1 (de) * | 2015-03-12 | 2016-09-15 | Liebherr-Werk Nenzing Gmbh | Verfahren zum Betrieb einer mobilen Arbeitsmaschine mit Bodendruckbegrenzung |
| US10077174B1 (en) * | 2015-04-21 | 2018-09-18 | Auto Crane Company | Automatic de-rate operating system and method for a truck mounted crane |
| FR3035874B1 (fr) * | 2015-05-05 | 2017-06-09 | Manitou Bf | Procede et dispositif de surveillance d'appui pour chariot comportant un moyen de stabilisateur |
| JP6210095B2 (ja) * | 2015-07-23 | 2017-10-11 | コベルコ建機株式会社 | 移動式クレーン |
| CN105152044B (zh) * | 2015-08-26 | 2018-02-13 | 徐州重型机械有限公司 | 起重机及其支腿操纵方法和系统 |
| US9550475B1 (en) * | 2015-09-09 | 2017-01-24 | Altec Industries, Inc. | Securely deploying outrigger foot |
| DE102016104358B4 (de) * | 2016-03-10 | 2019-11-07 | Manitowoc Crane Group France Sas | Verfahren zum Ermitteln der Tragfähigkeit eines Krans sowie Kran |
| DE102016011189B4 (de) * | 2016-09-15 | 2024-06-27 | Liebherr-Werk Ehingen Gmbh | Vorrichtung zum Stabilisieren eines Krans |
| CN106495001A (zh) * | 2016-11-08 | 2017-03-15 | 泸州汉硕信息科技有限公司 | 基于应力应变技术的起重机支腿受力监测系统 |
| EP3335948B1 (de) | 2016-12-15 | 2019-09-25 | Alois Kober GmbH | Hubstützenanordnung mit einer sicherungseinrichtung |
| DE102016125450A1 (de) | 2016-12-22 | 2018-06-28 | Schwing Gmbh | Fahrbarer Großmanipulator |
| WO2018147388A1 (ja) * | 2017-02-09 | 2018-08-16 | 株式会社前田製作所 | 移動式クレーンの安全装置 |
| IT201700019360A1 (it) * | 2017-02-21 | 2018-08-21 | Manitou Italia Srl | Stabilizzatori perfezionati per macchine operatrici semoventi |
| US11111115B2 (en) | 2017-03-02 | 2021-09-07 | Maniitowoc Crane Companies, LLC | Wear pad with insert for telescoping boom assembly |
| CN108100900A (zh) * | 2017-12-21 | 2018-06-01 | 合肥市春华起重机械有限公司 | 一种高机动性稳定型吊机设备 |
| US10846495B2 (en) | 2017-12-29 | 2020-11-24 | Manitowoc Crane Companies, Llc | Measurement system |
| CA3034670A1 (en) | 2018-02-27 | 2019-08-27 | Joy Global Surface Mining Inc | Shovel stabilizer appendage |
| US10821945B2 (en) | 2018-03-02 | 2020-11-03 | Manitowoc Crane Companies, Llc | Outrigger pad assembly having a force sensor |
| DE102018204079A1 (de) * | 2018-03-16 | 2019-09-19 | Putzmeister Engineering Gmbh | Autobetonpumpe und Verfahren zur stabilitätsrelevanten Steuerung einer Autobetonpumpe |
| DE102018204281A1 (de) * | 2018-03-20 | 2019-09-26 | Putzmeister Engineering Gmbh | Vorrichtung zur Grundbruchüberwachung und System |
| DE102019113881A1 (de) * | 2019-02-12 | 2020-08-13 | Putzmeister Engineering Gmbh | Betonpumpe und Verfahren zum Abstützen einer Betonpumpe |
| RU2703097C1 (ru) * | 2019-02-18 | 2019-10-15 | Геннадий Геннадьевич Лосев | Способ подъема груза |
| DE102019121746A1 (de) * | 2019-08-13 | 2021-02-18 | Liebherr-Werk Biberach Gmbh | Verfahren und Vorrichtung zum Erfassen des Rüstzustands einer Bau- und/oder Materialumschlagsmaschine |
| CN110588594A (zh) * | 2019-10-18 | 2019-12-20 | 三一汽车起重机械有限公司 | 一种支腿式工程机械 |
| CN111895958B (zh) * | 2020-07-24 | 2022-11-18 | 三一汽车制造有限公司 | 支腿装置和作业机械 |
| WO2022064389A1 (en) * | 2020-09-28 | 2022-03-31 | Fravizel - Equipamentos Metalomecânicos, S.A. | Vehicle for cutting rocks |
| DE102021115645A1 (de) * | 2021-06-17 | 2022-12-22 | Schwing Gmbh | Fahrbarer Großmanipulator |
| CN113772564B (zh) * | 2021-08-04 | 2022-09-20 | 中联重科股份有限公司 | 用于调整支腿受力的方法、装置及工程机械 |
| US12181372B2 (en) * | 2021-09-23 | 2024-12-31 | Raptor Tech Inc. | Stabilizer mat test system and methods |
| US20230101101A1 (en) * | 2021-09-28 | 2023-03-30 | Industries N.R.C. Inc | Lifting chart for tow vehicle |
| CN116969308B (zh) * | 2023-09-22 | 2023-12-26 | 山东天源重工集团有限公司 | 一种稳定装置及桥式起重机 |
| CN117819396B (zh) * | 2024-02-29 | 2024-05-31 | 广东省特种设备检测研究院顺德检测院 | 一种基于多维数据分析的起重机智能监测及运维系统 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0336196A (ja) * | 1989-06-30 | 1991-02-15 | Tadano Ltd | 移動式クレーンのアウトリガ反力表示装置 |
| JPH0468095U (ja) * | 1990-10-25 | 1992-06-16 | ||
| JPH06127886A (ja) * | 1992-10-13 | 1994-05-10 | Ishikawajima Harima Heavy Ind Co Ltd | クレーン群の故障診断方法 |
| JPH10237904A (ja) * | 1997-02-25 | 1998-09-08 | Shin Caterpillar Mitsubishi Ltd | 建設機械の制御方法およびその装置 |
| JPH1165645A (ja) * | 1997-08-15 | 1999-03-09 | Komatsu Ltd | 機械の異常監視装置および方法 |
| JP2001220086A (ja) * | 1999-12-03 | 2001-08-14 | Furukawa Co Ltd | ロードセル及びクレーンの転倒警報装置 |
| JP2005156360A (ja) * | 2003-11-26 | 2005-06-16 | Kyushu Electric Power Co Inc | 接近検知装置及び接近検知方法 |
| JP2008195478A (ja) * | 2007-02-09 | 2008-08-28 | Docomo Engineering Chugoku Inc | 収納状態検出装置及び収納状態検出システム |
| JP2010159148A (ja) * | 2009-01-09 | 2010-07-22 | Tadano Ltd | 作業車のジャッキ反力表示装置及び作業車 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4216868A (en) * | 1978-08-04 | 1980-08-12 | Eaton Corporation | Optical digital sensor for crane operating aid |
| EP0473784B1 (en) * | 1990-03-23 | 1996-02-21 | Kabushiki Kaisha Kobe Seiko Sho | Method of and apparatus for controlling stopping of turning of upper swing unit for construction machines, and angle of inclination computing apparatus |
| JP2000034093A (ja) * | 1998-07-21 | 2000-02-02 | Kobe Steel Ltd | 旋回式作業機械とその安全作業領域及び定格荷重の設定方法 |
| US6378686B1 (en) * | 1999-06-02 | 2002-04-30 | Putzmeister Inc. | Vehicle-mounted conveyor system including powered rotating infeed conveyor |
| US6283269B1 (en) * | 1999-12-03 | 2001-09-04 | Putzmeister, Inc. | Vehicle-mounted extendable conveyor having variable angle infeed conveyor assembly |
| US6516917B1 (en) * | 1999-12-29 | 2003-02-11 | Putzmeister, Inc. | Outrigger assembly for a mobile telescopic belt conveyor |
| DE10110176A1 (de) | 2001-03-02 | 2002-09-05 | Putzmeister Ag | Mobiles Arbeitsgerät mit Standsicherheitsüberwachung |
| DE10349234A1 (de) * | 2003-10-20 | 2005-05-19 | Putzmeister Ag | Mobiles Arbeitsgerät mit Stützauslegern |
| WO2007000256A1 (en) * | 2005-06-28 | 2007-01-04 | Abb Ab | Load control device for a crane |
| DE102005034677A1 (de) * | 2005-07-25 | 2007-02-01 | Liebherr-Werk Nenzing Gmbh, Nenzing | Kran |
| CN2920952Y (zh) * | 2006-07-13 | 2007-07-11 | 徐州重型机械有限公司 | 垂直支腿压力检测装置 |
| CN201095573Y (zh) * | 2007-08-20 | 2008-08-06 | 兰州金牛轨道交通装备有限责任公司 | 铁路起重机支腿自动调平控制系统 |
| DE102008058937A1 (de) * | 2008-05-21 | 2009-11-26 | Putzmeister Concrete Pumps Gmbh | Mobiles Arbeitsgerät mit Standsicherheitsüberwachung |
| GB2464914B (en) * | 2008-08-22 | 2012-07-25 | Trw Automotive Us Llc | Vehicle length sensors |
| US8506232B2 (en) * | 2008-12-02 | 2013-08-13 | Loop Belt Industries, Inc. | Vehicle mounted conveyor system and vehicles having conveyor systems |
| BRPI1001193A2 (pt) * | 2010-02-11 | 2012-07-03 | Vinicius De Carvalho Cal | aperfeiçoamento em grua e processo de controle de contrapeso em uma grua, em tempo real |
| KR101790150B1 (ko) * | 2010-05-24 | 2017-10-25 | 히다치 겡키 가부시키 가이샤 | 작업 기계의 안전 장치 |
| US8857635B2 (en) * | 2010-12-22 | 2014-10-14 | Terex Cranes Germany Gmbh | Crane and method for operating a crane using recovery of energy from crane operations as a secondary energy source |
| US8881919B2 (en) * | 2011-05-04 | 2014-11-11 | Manitowoc Crane Companies, Llc | System for measuring length of a beam extension and detecting support |
| DE102011107754B4 (de) * | 2011-06-10 | 2021-07-22 | Liebherr-Werk Ehingen Gmbh | Winkelbezogenes Verfahren zur Überwachung der Kransicherheit während des Rüstvorgangs, sowie Kran und Kransteuerung |
| RU2012140237A (ru) | 2011-09-23 | 2014-03-27 | МАНИТОВОК КРЕЙН КАМПЕНИЗ, ЭлЭлСи | Система и способы контроля выносных опор |
| CN102556866B (zh) * | 2012-03-14 | 2013-08-14 | 三一汽车起重机械有限公司 | 起重设备稳定性监控系统及其方法 |
-
2013
- 2013-03-14 US US13/828,127 patent/US9365398B2/en active Active
- 2013-10-23 EP EP13189867.8A patent/EP2727876B1/en active Active
- 2013-10-28 JP JP2013223017A patent/JP2014091632A/ja active Pending
- 2013-10-30 RU RU2013148387/11A patent/RU2013148387A/ru not_active Application Discontinuation
- 2013-10-30 BR BR102013028003A patent/BR102013028003A2/pt not_active Application Discontinuation
- 2013-10-31 CN CN201310669724.0A patent/CN103787215B/zh active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0336196A (ja) * | 1989-06-30 | 1991-02-15 | Tadano Ltd | 移動式クレーンのアウトリガ反力表示装置 |
| JPH0468095U (ja) * | 1990-10-25 | 1992-06-16 | ||
| JPH06127886A (ja) * | 1992-10-13 | 1994-05-10 | Ishikawajima Harima Heavy Ind Co Ltd | クレーン群の故障診断方法 |
| JPH10237904A (ja) * | 1997-02-25 | 1998-09-08 | Shin Caterpillar Mitsubishi Ltd | 建設機械の制御方法およびその装置 |
| JPH1165645A (ja) * | 1997-08-15 | 1999-03-09 | Komatsu Ltd | 機械の異常監視装置および方法 |
| JP2001220086A (ja) * | 1999-12-03 | 2001-08-14 | Furukawa Co Ltd | ロードセル及びクレーンの転倒警報装置 |
| JP2005156360A (ja) * | 2003-11-26 | 2005-06-16 | Kyushu Electric Power Co Inc | 接近検知装置及び接近検知方法 |
| JP2008195478A (ja) * | 2007-02-09 | 2008-08-28 | Docomo Engineering Chugoku Inc | 収納状態検出装置及び収納状態検出システム |
| JP2010159148A (ja) * | 2009-01-09 | 2010-07-22 | Tadano Ltd | 作業車のジャッキ反力表示装置及び作業車 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101759899B1 (ko) * | 2016-02-29 | 2017-07-21 | 장하영 | 특장차 탑재형 아웃리거 장치 |
| US20210276840A1 (en) * | 2018-11-21 | 2021-09-09 | Alexander Dangel | Crane and method for monitoring the operation of such a crane |
| US12202712B2 (en) * | 2018-11-21 | 2025-01-21 | Liebherr-Werk Biberach Gmbh | Crane and method for monitoring the operation of such a crane |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103787215A (zh) | 2014-05-14 |
| CN103787215B (zh) | 2018-02-16 |
| BR102013028003A2 (pt) | 2017-05-02 |
| US9365398B2 (en) | 2016-06-14 |
| US20140116975A1 (en) | 2014-05-01 |
| RU2013148387A (ru) | 2015-05-10 |
| EP2727876B1 (en) | 2016-11-23 |
| EP2727876A1 (en) | 2014-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014091632A (ja) | アウトリガパッド監視装置 | |
| US10472214B2 (en) | Crane and method for monitoring the overload protection of such a crane | |
| EP2573039A2 (en) | Outrigger monitoring system and methods | |
| US10597266B2 (en) | Crane and method for monitoring the overload protection of such a crane | |
| US10752473B2 (en) | Method of monitoring crane safety and a system for monitoring crane safety | |
| US8874329B2 (en) | Method and device for monitoring the stability of a loading crane mounted on a vehicle | |
| EP1346943A2 (en) | Measurement system and method for assessing lift vehicle stability | |
| US20230227300A1 (en) | Machine stability detection and indication for mobile lifting equipment | |
| US7378950B2 (en) | Overload warning means for excavators | |
| US20210269285A1 (en) | Crane with an anti-collision device and method for installing such an anti-collision device | |
| JP5053649B2 (ja) | 平板載荷試験装置および平板載荷試験方法 | |
| CN215626268U (zh) | 配重监测系统、臂架监测系统、吊载安全监测系统及起重设备 | |
| US10322922B2 (en) | Lifting vehicle incorporating a load monitor | |
| EP2202194A1 (en) | Method of measuring bending of personnel hoist boom, personnel hoist, and measurement system | |
| CN110759281A (zh) | 伸缩臂结构的称重方法及其结构、设备、存储介质 | |
| CN116588841A (zh) | 一种起重机防倾翻方法及装置 | |
| JP5867009B2 (ja) | 旋回式作業機械の被害量表示装置 | |
| JP2009035386A (ja) | 高所作業車の点検装置 | |
| KR102005853B1 (ko) | 타워크레인의 텔레스코핑 작업시 흔들림 감지장치 | |
| US10746587B1 (en) | System and method for determining a reel weight on a reel-carrying unit | |
| US8943874B2 (en) | Construction machine | |
| US11359980B2 (en) | Device and method for measuring a load applied by an elongate member | |
| JP6881095B2 (ja) | 移動式クレーン | |
| KR100648363B1 (ko) | 유압식 굴삭기의 회전각 검출에 의한 인양력 모니터링시스템 | |
| CA3053199A1 (en) | Device and method for measuring a load applied by an elongate member |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161020 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170814 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170822 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171120 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180122 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180417 |