JP2014018075A - 過電流検出装置 - Google Patents
過電流検出装置 Download PDFInfo
- Publication number
- JP2014018075A JP2014018075A JP2013226385A JP2013226385A JP2014018075A JP 2014018075 A JP2014018075 A JP 2014018075A JP 2013226385 A JP2013226385 A JP 2013226385A JP 2013226385 A JP2013226385 A JP 2013226385A JP 2014018075 A JP2014018075 A JP 2014018075A
- Authority
- JP
- Japan
- Prior art keywords
- overcurrent
- detection device
- current
- current value
- overcurrent detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Abstract
【解決手段】
本発明による過電流検出装置は、所定のサイクル毎に相電流検出器で検出した相電流値から過電流を検出する第1の判定回路を備え、この第1の判定回路は、相電流値が所定の振幅閾値を越えるか否かを、所定の振幅閾値を越える相電流値の周波数を検出することによって判定し、この周波数が検出された場合は過電流と判定する。
【選択図】図3
Description
(1)出力地絡/天絡
(2)出力線間短絡
(3)出力相間短絡
また、特許文献1に開示されているようなコンパレータを用い、電流振幅が予め設定した閾値を越えると過電流が発生したと判定する方法を採用した場合においても、正しく過電流を検知することが困難な場合がある。
(2)請求項2に記載の発明は、請求項1に記載の過電流検出装置において、所定のサイクル毎に過電流を検出する第2の判定回路をさらに備え、第2の判定回路は、相電流検出器で検出した相電流値が、予め定めた振幅閾値を越えると過電流と判定することを特徴とする過電流検出装置である。
(3)請求項3に記載の発明は、請求項1に記載の過電流検出装置において、第1の判定回路は、相電流値の周波数検出を行う、所定のヒステリシス幅を有するヒステリシスコンパレータを備えることを特徴とする過電流検出装置である。
(4)請求項4に記載の発明は、請求項3に記載の過電流検出装置において、第1の判定回路は、ヒステリシスコンパレータのヒステリシス中心を所定の電流値に対応して変更する、ヒステリシス中心値変更回路をさらに備えることを特徴とする過電流検出装置である。
(5)請求項5に記載の発明は、請求項3に記載の過電流検出装置において、第1の判定回路は、相電流値から所定の電流値を減算して入力する減算回路をさらに備え、減算回路の出力をヒステリシスコンパレータに入力することを特徴とする過電流検出装置である。
(6)請求項6に記載の発明は、請求項4または5に記載の過電流検出装置において、第1の判定回路は、サンプルホールドをさらに備え、所定の電流値には、所定の時間間隔で前記サンプルホールドにより保持される相電流値を用いることを特徴とする過電流検出装置である。
(7)請求項7に記載の発明は、請求項4または5に記載の過電流検出装置において、所定の電流値には、指令電流値を用いることを特徴とする過電流検出装置である。
(8)請求項8に記載の発明は、請求項3乃至7のいずれか1項に記載の過電流検出装置において、ヒステリシスコンパレータからの出力変化をカウントすることによって、相電流値が所定の振幅を超える回数を計数するカウンタをさらに備え、第1の判定回路は、カウンタで計数した計数値に基づいて、相電流値が所定の振幅を超える周波数を検出した場合に過電流と判定することを特徴とする過電流検出装置である。
(9)請求項9に記載の発明は、請求項3乃至7のいずれか1項に記載の過電流検出装置において、ヒステリシスコンパレータから出力されるパルスの立ち上がり/立ち下がりエッジの位置を検出するキャプチャとフリーランカウンタとをさらに備え、第1の判定回路は、パルスの立ち上がりエッジおよび立ち下りエッジの位置に基づいて、相電流値が所定の振幅を超える周期を検出し、この周期に基づいて相電流値が所定の振幅を超える周波数を検出することを特徴とする過電流検出装置である。
(10)請求項10に記載の発明は、請求項1および3乃至9のいずれか1項に記載の過電流検出装置において、第1の判定回路によって検出した相電流値が所定の振幅を超える周波数から、電動駆動制御装置における過電流発生の原因を判定することを特徴とする過電流検出装置である。
(11)請求項11に記載の発明は、請求項1乃至10のいずれか1項に記載の過電流検出装置において、過電流と判定した場合に、インバータのトランジスタのゲート信号をオフし、前記トランジスタを保護することを特徴とする過電流検出装置である。
図1に電動駆動制御装置全体の概略を示す。電動駆動制御装置はバッテリー1、インバータ2、交流モータ3、直流入力電圧検出器4、U相、V相、W相の各々の電流検出器5、6、7、回転角検出器8、制御回路9、ゲート駆動回路10、そして制御やゲート駆動に必要な電源11で構成されている。
電動駆動制御装置は外部の上位制御装置から、自動車の運転者および自動車の状態に基づいた速度指令もしくはトルク指令を受け、直流電圧検出器4からの直流電圧値vdc、電流検出器5、6、7からのU相、V相、W相のそれぞれの相電流値iu、iv、iw、回転位置検出器8からのモータ回転子の回転位置角に基づき、モータ3が必要な回転トルクを発生するように、ゲート駆動回路を制御し、インバータ回路2からモータに供給されるU相、V相、W相の電流を制御する。
また以下の説明では簡単のために、制御回路9の動作の説明で用いられる、制御回路9に入力される直流電圧値vdc、相電流値iu、iv、iw、回転位置角およびその他の電流値あるいは電圧値は、それぞれこれらの値に対応する例えば0〜5Vの電圧値である。更に後述の制御回路に備えられたマイクロコンピュータ(マイコン)での処理の説明においては、これらの値はそれぞれこれらに対応した0〜5Vの電圧をAD変換したデジタル値である。また更に誤解の生じない場合は、電流値および電圧値をそれぞれ電流および電圧と略記する。
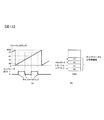
連続通電(DC動作)の場合は300[A](コレクタ温度TC=25℃の場合)で連続運転可能であるが、パルス運転であればその倍の600[A]まで通電が可能である。
その検出値と所定のレベルをコンパレータで比較し、その判定結果に応答して、トランジスタのゲートをオフする。
このため、交流出力電流、すなわち、モータ巻線電流と回転子の位置角を検出し、制御回路9によりインバータ2の出力電流制御を行うことで、モータが所定の駆動力を発生するようにU相、V相、W相の電流を供給する。
この制御回路9は相電流値および直流電圧値の振幅が所定の値を超える場合は異常と判定し、ゲート駆動回路にインバータのトランジスタのゲート信号をオフさせて、トランジスタを保護する、過電流保護機能を実装している。
処理が開始するとステップS801で、他処理で演算し、記憶されたd軸および、q軸電流指令id*、iq*をメモリより読み込む。ステップS802で3相の出力電流iu、iv、iw(図1参照)のAD変換結果を、ステップS803で直流電圧vdcを、それぞれ所定のレジスタより読み込む。そして、ステップS804において、回転角θをマイコン39の外部メモリデータバス25に接続されたRDコンバータから読み込む。
vd=Kpd・ed+Kid{ed+ed0} ...(1)
vq=Kpq・eq+Kiq{eq+eq0}
ここで、Kpd、Kpqはそれぞれd軸、q軸の比例ゲイン、Kid、Kiqはd軸、q軸の積分ゲインである。またed、eqはそれぞれd軸、q軸の電流偏差であり、ed0、eq0はそれぞれ1サンプル前(このフローチャートに示す処理を前周期に実行した時)のd軸、q軸の電流偏差である。
tu=Tc・(1+vu*/vdc)/2 ...(2)
tv=Tc・(1+vv*/vdc)/2
tw=Tc・(1+vw*/vdc)/2
図5を参照して従来の過電流検出のフローチャートを説明する。この処理が開始すると、図4のステップS802で読み込んだ3相電流をステップS91において所定レベル(閾値)と比較する。電流がこの所定レベルを超えた場合には、過電流と判定し、ステップS92において、カウンタCをインクリメントする。電流が所定レベル以下の場合は、ステップS93において、カウンタをゼロにセットする。ステップS94において、カウンタが所定カウント値に達したかを判定し、所定カウント値を超えた場合には、ステップS95において、インバータの全トランジスタ素子をオフし、ステップS96で過電流異常フラグをセットし、ステップS97で復帰する。カウンタが所定カウント以下の場合は、ステップS97で復帰する。過電流異常フラグがセットされた場合には、その他の処理(図示省略)にて、所定の手続きで、再スタート可の判定により、過電流異常フラグがクリアされるまで、図4のフローチャート処理は停止する。
異常がない場合は、図4に示すフローチャートの一連の処理によりインバータ出力電流は所定の指令電流に制御される。
図7(a)は出力地絡の等価回路である。この等価回路は、Yコンデンサ(C1=C2とする)、主コンデンサC0そして地絡点までの配線の抵抗51(r)、インダクタンス52(L)のLCR直列回路として示されている。そして、抵抗値は十分小さく、また、C0に比べ、C1は十分小さいので、r2−4L/C<0の条件が成り立ち、この直列回路には、下記の(3)式で示す周波数fcの共振電流が流れる。
fc=(1/(L・2・C1)−(r/(2L))2)0.5/2π [Hz]
...(3)
そして、そのピーク電流ipeakは、コンデンサの初期電圧をVとすれば、
ipeak=2V/((4L−r2)/(2・C1))0.5[A]
...(4)
で与えられる。
ここで、インバータの入力直流電圧vdc=350[V](C1の初期電圧Vはこの半分であり、175[V])とし、インバータからモータへの1相分の配線抵抗r=1[mΩ]、インダクタンスL=0.5[μH]、主コンデンサC0=900[μF]、Yコンデンサ=1[μF]とすると、その周波数は159[kHz]になり、ピーク電流は495[A]となる。
図8は、図6(c)で示した線間短絡の場合の電流の流れを示す。ここではU相巻線とV相巻線の間で線間短絡が起こったとして示してある。なお、簡単のため、インバータの関係する部分のみ示している。トランジスタはU相、V相、W相いずれでもよいので、この線間短絡に関わるトランジスタをSWa、SWb、Sp、Snでとして図示している。
fcs=(1/(Ls・C0)−(rs/(2Ls))2)0.5/(2π)[Hz] ...(5)
となる。仮に、Lsを5[μH]として、前述と同じ回路定数を用い共振周波数を求めると2.4[kHz]になる。インバータのPWM周期を10[kHz]とすると、例えば、共振の1周期に図8(a)のトランジスタSWaは4回スイッチングする。
なお、図8(a)の中で、実線の矢印がトランジスタSWaオン時の電流経路(直流電圧が短絡線間に印加)、破線の矢印がトランジスタSWaオフ時の電流経路(ゼロ電圧が短絡線間に印加)を示している。
期間II:コイルのLsが通常より小さくなっているため、電流制御により図8(b)のトランジスタSWbのDutyが調整されても、指令電流に対し、実電流は大きくアンダーシュートする。
なお、図8(b)の中で、実線の矢印がトランジスタSWbオン時の電流経路(直流電圧が短絡線間に印加)、破線の矢印がトランジスタSWbオフ時の電流経路(ゼロ電圧が短絡線間に印加)を示している。
また、上述したとおり、制御に使う電流検出器の検出範囲は、電流制御が機能することを前提に選定されるので、オーバーシュートもしくはアンダーシュートが大きいと、検出値はクランプされてしまい、更に、制御系は発振的動作に陥る。
もっとも、地絡の場合に比べ、周波数が低いため、検知範囲を超えない領域で、電流はマイコンにて正しくサンプリングが可能であり、また、この検知により電流がクランプしたことも判定はできる。しかし、マイコンの通常の過電流検知アルゴリズムでは、過電流を検知できない場合がある。
以下に従来の過電流検知方法を説明し、次にこれを改善する本発明の過電流検知装置およびこれを用いた検知方法を説明する。
マイコンを用いた通常の過電流検知アルゴリズムでは、誤検知を解消するため、タイムウィンドウを設ける。これは、具体的には、所定のサンプル回数連続して過電流を検知した場合に、異常を確定するものである(図5のフローチャート参照)。
また、天絡についても同様に、インバータ出力端のインピーダンスが極めて小さくなるため、電流制御の発振を引き起こす可能性がある。
図3で既に説明したように、各相電流検出器の出力は、マイコン39のADコンバータ19に入力するとともに、ヒステリシスコンパレータ20に入力される。ヒステリシスコンパレータ20のヒステリシス幅は大振幅の振動電流をパルス変換するために、例えば、連続定格300[A]のトランジスタを使う場合、100[A]程度に設定する。そして、このコンパレータ20の出力はマイコン39の外部パルスカウンタ21、22および23の各端子に接続される。これらのパルスカウンタ21、22および23は、パルスの立ち上がりエッジでカウントアップするように、図示を省略する他の処理で初期設定している。
図11は本発明による過電流検出処理のフローチャートである。このフローチャートは所定の周期で実行される。本実施形態では過電流検出処理は電流制御処理の実行毎に、図4のステップS805においてコールされる。まず、図11のフローチャートのステップS501〜S504までの処理により、電流の振幅と閾値の比較により、過電流を判定する処理を実行する。次に、ステップS505において、カウンタ値Fkを上記ヒステリシスコンパレータが接続された外部パルスカウンタから読み込む。読み込み完了と同時にステップS506でカウンタをクリアする。
FPk=Fk/Tsampl ...(6)
により、周波数に換算できる。また、判定するカウンタ閾値Flimitは、周波数の閾値をFPlimit[Hz]とすれば、
Flimit=FPlimit・Tsampl ...(7)
と設定できる。
fc=(1/(L・2・C1))0.5 /(2π)[Hz] ...(8)
または、
fcs=(1/(Ls・C0))0.5 /(2π) [Hz] ...(9)
のように計算式を簡略化でき、これに基づいて上記周波数を算出してもよい。
図12は、本発明による制御回路のもう1つの実施形態のブロック図を示している。これは、マイコン内のカウンタ21、22および23)に代えて、(1)3つのキャプチャ34、35および36)端子に各相コンパレータ出力をそれぞれ接続する。(2)計時用のフリーランカウンタ37を追加する。(3)キャプチャ毎にデータを所定のRAM領域に転送するDMAコントローラ38を追加する。
このようにしてパルスの立ち上がり/立ちさがりの位置が検出され、このパルスの立ち上がり/立ちさがりの位置から、このパルスの周波数が求められる。
なお、振幅を検出する従来の方法に基づく、図5のフローチャートで実施される過電流検出処理は、図8の電流制御処理フローチャートのS805にてコールするように設定する。
図16は、本発明を実施するヒステリシスコンパレータの構成例を1相分示している。電流検知器は、0〜5[V]の出力範囲で、電流0[A]で2.5[V]が出力される形式を採用した例である。便宜上、300[A]時に5[V]、−300[A]時に0[V]、電流に対してリニアに電圧が出力されるとして、以下、説明する。
この故障モードを不揮発性メモリーなどに記憶しておけば、後ほど、データを読み取り不具合箇所の特定に役立てることができる。
2 電圧形インバータ
3 モータ
4 直流電圧検出器
5、6、7 電流検出器
8 回転位置検出器(レゾルバ)
9 制御回路
10 ゲート駆動回路
11 スイッチング電源
12、13、14 コンデンサ
19 ADコンバータ
20 ヒステリシスコンパレータ
21、22、23 カウンタ
24 RDコンバータ
25 外部データ/アドレスバス
26、27、28 PWMタイマ
29 キャリア(fc)タイマ
30 ROM/RAM
31 CPU
32 マルチプレクサ&サンプルホールド
33 内部データ/アドレスバス
34、35、36 キャプチャ
37 フリーランカウンタ
38 DMAコントローラ
39 マイクロコンピュータ(マイコン)
40 コンパレータ(オープンコレクタ出力)
41、42、43 オペアンプ
51 地絡時の抵抗r
52 地絡時のインダクタンスL
53 出力線間短絡時の抵抗rs
54 出力線間短絡時のインダクタンスLs
r、rs、R1、R2、R3、R4、R11、R12、R13、R14、Rp、Rpo、Rps; 抵抗
L、Ls; インダクタ(および、そのインダクタンス)
C0、C1、C2、Cs; コンデンサ(および、その容量)
Tu+、Tv+、Tw+、Tu−、Tv−、Tw−、SWa、SWb、Sp、Sn; トランジスタ
Du+、Dv+、Dw+、Du−、Dv−、Dw−; ダイオード
Sw; スイッチ
v; 電圧
i0、i1、i2、i3、i4、i5、i6; 各サンプル点の電流レベル
iu、iv、iw; モータの各相コイルに流れる電流の検出値
(2)請求項2に記載の発明は、請求項1に記載の過電流検出装置において、過電流を検出する第2の判定部をさらに備え、第2の判定部は、相電流値が、予め定めた振幅閾値を越えると過電流と判定することを特徴とする過電流検出装置である。
(3)請求項3に記載の発明は、請求項1に記載の過電流検出装置において、第1の判定部は、相電流値の周波数検出を行う、所定のヒステリシス幅を有するヒステリシスコンパレータを備えることを特徴とする過電流検出装置である。
(4)請求項4に記載の発明は、請求項3に記載の過電流検出装置において、第1の判定部は、ヒステリシスコンパレータのヒステリシス中心を所定の電流値に対応して変更する、ヒステリシス中心値変更回路をさらに備えることを特徴とする過電流検出装置である。
(5)請求項5に記載の発明は、請求項3に記載の過電流検出装置において、第1の判定部は、相電流値から所定の電流値を減算し、ヒステリシスコンパレータに入力することを特徴とする過電流検出装置である。
Claims (11)
- モータを駆動するために直流電流を3相交流に変換するインバータと、
前記インバータに流れる直流電圧値を検出する直流電圧検出器と、
前記3相交流の各々の相電流値を検出する相電流検出器と、
モータの回転角を検出する回転位置検出器と、
前記相電流検出器からの前記相電流値、前記回転位置検出器からのモータ回転角検出値、および上位制御装置からの速度指令もしくはトルク指令に基づいて、前記インバータの出力電流を制御するゲート駆動回路を所定のサイクル毎に制御する制御回路と、
前記所定のサイクル毎に前記相電流検出器で検出した前記相電流値から過電流を検出する第1の判定回路とを備え、
前記第1の判定回路は、前記相電流値が所定の振幅閾値を越えるか否かを、所定の振幅閾値を越える前記相電流値の周波数検出を行うことによって判定し、前記周波数が検出された場合は過電流と判定することを特徴とする過電流検出装置。 - 請求項1に記載の過電流検出装置において、
前記過電流検出装置は、
前記所定のサイクル毎に過電流を検出する第2の判定回路をさらに備え、
前記第2の判定回路は、前記相電流検出器で検出した前記相電流値が、予め定めた振幅閾値を越えると過電流と判定することを特徴とする過電流検出装置。 - 請求項1に記載の過電流検出装置において、
前記第1の判定回路は、
前記相電流値の前記周波数検出を行う、所定のヒステリシス幅を有するヒステリシスコンパレータを備えることを特徴とする過電流検出装置。 - 請求項3に記載の過電流検出装置において、
前記第1の判定回路は、前記ヒステリシスコンパレータのヒステリシス中心を所定の電流値に対応して変更する、ヒステリシス中心値変更回路をさらに備えることを特徴とする過電流検出装置。 - 請求項3に記載の過電流検出装置において、
前記第1の判定回路は、
前記相電流値から所定の電流値を減算して入力する減算回路をさらに備え、
前記減算回路の出力を前記ヒステリシスコンパレータに入力することを特徴とする過電流検出装置。 - 請求項4または5に記載の過電流検出装置において、
前記第1の判定回路は、
サンプルホールドをさらに備え、
前記所定の電流値には、所定の時間間隔で前記サンプルホールドにより保持される前記相電流値を用いることを特徴とする過電流検出装置。 - 請求項4または5に記載の過電流検出装置において、
前記所定の電流値には、指令電流値を用いることを特徴とする過電流検出装置。 - 請求項3乃至7のいずれか1項に記載の過電流検出装置において、
前記ヒステリシスコンパレータからの出力変化をカウントすることによって、前記相電流値が所定の振幅を超える回数を計数するカウンタをさらに備え、
前記第1の判定回路は、前記カウンタで計数した計数値に基づいて、前記相電流値が所定の振幅を超える周波数を検出した場合に過電流と判定することを特徴とする過電流検出装置。 - 請求項3乃至7のいずれか1項に記載の過電流検出装置において、
前記ヒステリシスコンパレータから出力されるパルスの立ち上がり/立ち下がりエッジの位置を検出するキャプチャとフリーランカウンタとをさらに備え、
前記第1の判定回路は、前記パルスの立ち上がりエッジおよび立ち下りエッジの位置に基づいて、前記相電流値が所定の振幅を超える周期を検出し、この周期に基づいて前記相電流値が所定の振幅を超える周波数を検出することを特徴とする過電流検出装置。 - 請求項1および3乃至9のいずれか1項に記載の過電流検出装置において、
前記第1の判定回路によって検出した前記相電流値が所定の振幅を超える周波数から、前記電動駆動制御装置における過電流発生の原因を判定することを特徴とする過電流検出装置。 - 請求項1乃至10のいずれか1項に記載の過電流検出装置において、
過電流と判定した場合に、前記インバータのトランジスタのゲート信号をオフし、前記トランジスタを保護することを特徴とする過電流検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013226385A JP5628398B2 (ja) | 2013-10-31 | 2013-10-31 | 過電流検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013226385A JP5628398B2 (ja) | 2013-10-31 | 2013-10-31 | 過電流検出装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010194067A Division JP5406146B2 (ja) | 2010-08-31 | 2010-08-31 | 電動駆動制御装置の過電流検出装置および過電流検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014018075A true JP2014018075A (ja) | 2014-01-30 |
| JP5628398B2 JP5628398B2 (ja) | 2014-11-19 |
Family
ID=50112245
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013226385A Active JP5628398B2 (ja) | 2013-10-31 | 2013-10-31 | 過電流検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5628398B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018082581A (ja) * | 2016-11-17 | 2018-05-24 | ミネベアミツミ株式会社 | モータ駆動制御装置及びモータ駆動制御方法 |
| JP7151827B1 (ja) | 2021-06-01 | 2022-10-12 | 富士電機株式会社 | 診断装置、診断方法、および、診断プログラム、並びに、診断装置を含む電力変換装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04129494A (ja) * | 1990-09-20 | 1992-04-30 | Fujitsu Ltd | 合成成分周波数の周波数検出方法 |
| JPH07221613A (ja) * | 1994-01-13 | 1995-08-18 | Fluke Corp | トリガ回路 |
| JPH1014094A (ja) * | 1996-06-21 | 1998-01-16 | Tempearl Ind Co Ltd | 配線用遮断器 |
| JPH1042569A (ja) * | 1996-07-23 | 1998-02-13 | Hitachi Ltd | パルス幅変調変換器の出力制御装置 |
| JP2002199744A (ja) * | 2000-12-27 | 2002-07-12 | Daikin Ind Ltd | インバータ保護方法およびその装置 |
| JP2003079183A (ja) * | 2001-09-03 | 2003-03-14 | Mitsubishi Electric Corp | 同期電動機の脱調検出装置及び同期電動機の脱調検出方法及び密閉形圧縮機の駆動装置及びファンモータの駆動装置 |
| JP2006322932A (ja) * | 2006-04-25 | 2006-11-30 | Yamatake Corp | 信号検出回路 |
| JP2010016982A (ja) * | 2008-07-03 | 2010-01-21 | Mitsubishi Electric Corp | モータ制御装置およびモータ地絡検出方法 |
-
2013
- 2013-10-31 JP JP2013226385A patent/JP5628398B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04129494A (ja) * | 1990-09-20 | 1992-04-30 | Fujitsu Ltd | 合成成分周波数の周波数検出方法 |
| JPH07221613A (ja) * | 1994-01-13 | 1995-08-18 | Fluke Corp | トリガ回路 |
| JPH1014094A (ja) * | 1996-06-21 | 1998-01-16 | Tempearl Ind Co Ltd | 配線用遮断器 |
| JPH1042569A (ja) * | 1996-07-23 | 1998-02-13 | Hitachi Ltd | パルス幅変調変換器の出力制御装置 |
| JP2002199744A (ja) * | 2000-12-27 | 2002-07-12 | Daikin Ind Ltd | インバータ保護方法およびその装置 |
| JP2003079183A (ja) * | 2001-09-03 | 2003-03-14 | Mitsubishi Electric Corp | 同期電動機の脱調検出装置及び同期電動機の脱調検出方法及び密閉形圧縮機の駆動装置及びファンモータの駆動装置 |
| JP2006322932A (ja) * | 2006-04-25 | 2006-11-30 | Yamatake Corp | 信号検出回路 |
| JP2010016982A (ja) * | 2008-07-03 | 2010-01-21 | Mitsubishi Electric Corp | モータ制御装置およびモータ地絡検出方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018082581A (ja) * | 2016-11-17 | 2018-05-24 | ミネベアミツミ株式会社 | モータ駆動制御装置及びモータ駆動制御方法 |
| JP7151827B1 (ja) | 2021-06-01 | 2022-10-12 | 富士電機株式会社 | 診断装置、診断方法、および、診断プログラム、並びに、診断装置を含む電力変換装置 |
| JP2022184604A (ja) * | 2021-06-01 | 2022-12-13 | 富士電機株式会社 | 診断装置、診断方法、および、診断プログラム、並びに、診断装置を含む電力変換装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5628398B2 (ja) | 2014-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5406146B2 (ja) | 電動駆動制御装置の過電流検出装置および過電流検出方法 | |
| JP6169203B1 (ja) | 電動機制御装置および電動機制御方法 | |
| CA2711504C (en) | Power conversion device | |
| JP4316005B1 (ja) | 交流電動機の駆動制御装置 | |
| JP2015208143A (ja) | 電動機駆動装置 | |
| CN107112922B (zh) | 变流器和用于运行变流器的方法 | |
| JP2014117112A (ja) | 半導体制御装置及び電力変換装置 | |
| JP6348424B2 (ja) | 電力変換装置 | |
| JP2019527027A (ja) | 電流コンバータの駆動方法およびその方法で駆動される電流コンバータ | |
| JP2016226190A (ja) | 回転電機の制御装置 | |
| JP6173516B1 (ja) | 電動機制御装置および電動機制御方法 | |
| JP5628398B2 (ja) | 過電流検出装置 | |
| JP2018160972A (ja) | モータ駆動回路の制御装置及びモータ駆動回路の診断方法 | |
| JP6342043B1 (ja) | 電動機制御装置および電動機制御方法 | |
| JP6203318B1 (ja) | 電動機制御装置および電動機制御方法 | |
| JP5923955B2 (ja) | 多相回転機の制御装置 | |
| JP2019170057A (ja) | モータ制御装置 | |
| JP2022176448A (ja) | 電力変換装置 | |
| JP7285901B2 (ja) | 電動機制御装置および電動機駆動システム | |
| JP7463989B2 (ja) | モータ制御装置 | |
| JP6065816B2 (ja) | インバータ装置 | |
| RU2449445C1 (ru) | Приводной контроллер для электродвигателя переменного тока | |
| RU2442274C1 (ru) | Устройство преобразования мощности |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140811 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140902 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141001 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5628398 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |