JP2013149928A - リソグラフィー装置および物品を製造する方法 - Google Patents
リソグラフィー装置および物品を製造する方法 Download PDFInfo
- Publication number
- JP2013149928A JP2013149928A JP2012011558A JP2012011558A JP2013149928A JP 2013149928 A JP2013149928 A JP 2013149928A JP 2012011558 A JP2012011558 A JP 2012011558A JP 2012011558 A JP2012011558 A JP 2012011558A JP 2013149928 A JP2013149928 A JP 2013149928A
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- substrate
- accuracy
- lithography apparatus
- alignment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images


Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7007—Alignment other than original with workpiece
- G03F9/7011—Pre-exposure scan; original with original holder alignment; Prealignment, i.e. workpiece with workpiece holder
Abstract
【課題】 CoOと要求精度との両立に有利なリソグラフィー装置を提供する。
【解決手段】 リソグラフィー装置は、基板を回転させる回転機構と、第1計測部と、第2計測部と、制御部とを備える。前記第1計測部は、前記基板に形成されたアライメントマークの第1方向における位置を第1精度で計測する。前記第2計測部は、前記基板に形成されたアライメントマークの第2方向における位置を前記第1精度より高い第2精度で計測する。前記制御部は、前記第1方向および前記第2方向においてそれぞれ要求される重ね合わせ精度が異なる前記基板を、前記重ね合わせ精度が高い前記基板の方向が前記第2方向に合うように前記回転機構を制御する。
【選択図】 図1A
【解決手段】 リソグラフィー装置は、基板を回転させる回転機構と、第1計測部と、第2計測部と、制御部とを備える。前記第1計測部は、前記基板に形成されたアライメントマークの第1方向における位置を第1精度で計測する。前記第2計測部は、前記基板に形成されたアライメントマークの第2方向における位置を前記第1精度より高い第2精度で計測する。前記制御部は、前記第1方向および前記第2方向においてそれぞれ要求される重ね合わせ精度が異なる前記基板を、前記重ね合わせ精度が高い前記基板の方向が前記第2方向に合うように前記回転機構を制御する。
【選択図】 図1A
Description
本発明は、リソグラフィー装置および物品を製造する方法に関する。
LSI製造の中にカッティングリソグラフィーまたは1Dリソグラフィーと呼ばれる工程がある。このカッティングリソグラフィーは、既にウエハ上に作成されているラインアンドスペースのパターンに対して、所望のライン長になる様にラインをカットしたり、不要なラインを削除したりする工程である。カッティングリソグラフィーの工程で要求されるウエハアライメント精度は、3σで8nm以下の精度が求められている。しかし、このウエハアライメント精度が必要なのは、ライン長を決める方向だけで、ライン長を決める方向に垂直な方向に関しては、隣接するラインにかからない程度の精度で十分である。例えば、50nmのラインアンドスペースの場合、±20nmのバラツキまで許容可能である。
このリソグラフィー工程に限らず露光装置、電子線描画装置等のリソグラフィー装置に関して、特に高いCoO(Cost of Ownership:所有コスト)が要求されている。しかし、現状では、アライメント精度の要求が厳しいためにクリティカルな工程で使用する高価で高精度なアライメント性能を有しているリソグラフィー装置を使用せざるをえない。そこで、従来のリソグラフィー装置では、ウエハアライメント性能に関してX方向およびY方向で共に同じ性能を保証している。従って、仮に、ライン長を決める方向が変更になっても従来のリソグラフィー装置はその変更に対応可能である。
特許文献1には、隣接して配置されたX方向計測用のファインアライメントマークとY方向計測用のファインアライメントマークとを、1つの検出光学系の同一視野にて検出することで、計測時間を短縮化したアライメント光学系が紹介されている。また、特許文献2では、露光する基板をステージへ搭載する前に基板の向きを露光する方向に合せて基板の向きを合せた後で、アライメントピンにて位置決めを行う方法が提案されている。以上のように、ウエハアライメント時間を短縮したり、描画する方向に基板の方向を合せたりする技術は提案されている。しかし、要求されるアライメント精度の方向差に考慮してアライメント性能とCoOとの両立を図った装置技術は、これまでは実現されていない。
光や電子線を使って所望の回路パターンを基板上に露光または描画するリソグラフィー装置の種々の性能の中で、近年、CoOが重要視される様になってきた。CoOの性能を良くする具体的な方法は、装置価格の低減や、単位時間当たりのウエハを処理する枚数の向上、消費電力やユーティリティーの使用量の削減、機能・付加価値等の追加など多岐に渡っており、ウエハのアライメント計測に関しても例外ではない。
ウエハアライメント計測を行う工程では、X方向、Y方向のそれぞれの方向に対して、ウエハアライメント計測に対する計測要求精度が設定されている。その計測要求精度は、X方向とY方向に同じ要求精度が設定される場合もあるし、X方向とY方向で差がつけられている場合もある。例えば、X方向に対する計測要求精度がY方向に比べて厳しいとき、従来技術の様に両方向のウエハアライメント計測に対して同じ計測処理を行うと、要求精度が厳しい方向に対して仕様を満たせない場合があり、歩留まりの低下に繋がる。また、要求精度が厳しい方向の計測条件に合わせて要求精度が緩い方向の計測を行うと、要求精度が緩い方向に関して計測回数等の計測条件がオーバースペックとなり、無駄な計測時間がウエハアライメントシーケンスの工程として費やされる。その結果、スループットが低下してCoOを低下させる。
そこで本発明は、CoOと要求精度との両立に有利なリソグラフィー装置を提供することを例示的目的とする。
本発明は、リソグラフィー装置であって、基板を回転させる回転機構と、前記基板に形成されたアライメントマークの第1方向における位置を第1精度で計測する第1計測部と、前記基板に形成されたアライメントマークの第2方向における位置を前記第1精度より高い第2精度で計測する第2計測部と、前記第1方向および前記第2方向においてそれぞれ要求される重ね合わせ精度が異なる前記基板を、前記重ね合わせ精度が高い前記基板の方向が前記第2方向に合うように前記回転機構を制御する制御部と、を備えることを特徴とする。
本発明によれば、例えば、CoOと要求精度との両立に有利なリソグラフィー装置を提供することができる。
以下に、本発明の好ましい実施形態を添付の図面に基づいて詳細に説明する。
[実施例1]
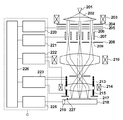
図2は、リソグラフィー装置として電子線を用いて基板にパターンを描画する描画装置を使用する実施例1を示す概略図である。描画装置として電子線に替えてイオンビーム等他の荷電粒子線を用いて基板にパターンを描画する描画装置も使用することができる。電子銃201から放射された電子線202は、コンデンサレンズ203によって複数の略平行の電子線206とされる。コンデンサレンズ203により略平行とされた電子線206は、アパーチャーアレイ204により分離され、フォーカス制御回路220に駆動されるレンズアレイ205により、ブランキング絞り208の近傍に電子銃のクロスオーバの中間像209を結ぶ。これらの中間像209の位置は、レンズアレイ205の個々の強度を変えることにより光軸方向の位置を変えることができる。また、ブランキングアレイ207に電圧を印加することにより中間像209は光軸と垂直方向に移動し、ブランキング絞り208によって遮断され、個々の分離された電子線206についてオンオフの制御が可能となる。
図2は、リソグラフィー装置として電子線を用いて基板にパターンを描画する描画装置を使用する実施例1を示す概略図である。描画装置として電子線に替えてイオンビーム等他の荷電粒子線を用いて基板にパターンを描画する描画装置も使用することができる。電子銃201から放射された電子線202は、コンデンサレンズ203によって複数の略平行の電子線206とされる。コンデンサレンズ203により略平行とされた電子線206は、アパーチャーアレイ204により分離され、フォーカス制御回路220に駆動されるレンズアレイ205により、ブランキング絞り208の近傍に電子銃のクロスオーバの中間像209を結ぶ。これらの中間像209の位置は、レンズアレイ205の個々の強度を変えることにより光軸方向の位置を変えることができる。また、ブランキングアレイ207に電圧を印加することにより中間像209は光軸と垂直方向に移動し、ブランキング絞り208によって遮断され、個々の分離された電子線206についてオンオフの制御が可能となる。
ブランキング絞り208の近傍に形成された中間像209を第1静電レンズ(又は電磁レンズ)210、第2静電レンズ(又は電磁レンズ)214からなる電子光学系によりウエハステージ(基板ステージ)218上のウエハ217に投影する。電子光学系は、第1静電レンズ210の後焦点位置と第2静電レンズ214の前焦点位置を共有するようにレンズ制御回路222によって駆動される。このとき、各中間像209を構成する複数の電子線206は、主偏向器213および副偏向器215により一括して偏向され、位置決めされる。例えば、主偏向器213は偏向幅を広く、副偏向器215は偏向幅を狭く用いる。そして、CPU226に蓄えられたパターンデータに基づく照射量制御回路221により電子線206のオンオフと、偏向制御回路223により駆動される主偏向器213および副偏向器215の偏向動作を同期させることにより描画が行われる。
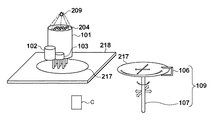
図1Aを用いて実施例1に係る描画装置のシステム構成を説明する。電子銃201が形成するクロスオーバ像を光源として電子光学系(投影系)101へ電子線が照射され、アパーチャーアレイ204にて複数本の電子線206が形成される。それ以降の電子線206に対する処理は既に述べた通りである。
実施例1では、電子線をウエハ217へ照射する電子光学系101の他に、ウエハ(基板)217上に作成されているウエハアライメントマークを計測するための計測系が用意されている。また、描画装置において第1方向およびそれに直交する第2方向が定義されている。ウエハアライメント計測系は、ウエハアライメント計測系(第1計測部)103とウエハアライメント計測系(第2計測部)102とを含む。ウエハアライメント計測系103は、ウエハ217に形成されたアライメントマーク131の第1方向における位置を第1精度(低精度)で計測する。低精度のウエハアライメント計測系103は、高精度のウエハアライメント計測系102のよりも計測精度が1桁程度低く、30〜50nm/3σ程度の計測再現性を有する。本実施例1では、ウエハアライメント計測系103は、アライメントマーク131の第2方向における位置をも第1精度(低精度)で計測する。ウエハアライメント計測系102は、ウエハ217に形成されたアライメントマーク130の第2方向における位置を第1精度よりも高い第2精度で計測する。高精度のウエハアライメント計測系102は、計測再現性で8nm/3σ以下の精度を有する。
高精度のウエハアライメント計測系102と低精度のウエハアライメント計測系103とを別個に備えるウエハアライメント計測系とする必要はない。例えば、1つのウエハアライメント計測系が計測倍率を切り換える機構を備えることで高精度および低精度のウエハアライメント計測を実現しても良い。高精度のウエハアライメント計測系102と低精度のウエハアライメント計測系103との役割は、概ね、以下の様に分かれている。
計測可能範囲は広いが低精度のウエハアライメント計測系103で初めに計測を行ってウエハ217の大まかなずれ量を求めておく。ウエハ217の大まかなずれ量を求めておくことで、計測可能な範囲は狭いが高精度のウエハアライメント計測系102で次に計測するときに確実にウエハアライメント計測系102の計測範囲内にアライメントマーク130が入るようにする。
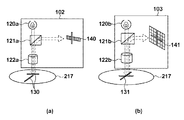
図1Bの(a)と(b)はそれぞれ、高精度のウエハアライメント計測系102と低精度のウエハアライメント計測系103の構成の一例を表している。高精度のウエハアライメント計測系102の光源120aは、例えば、白色光を射出するハロゲンランプでも良いし、レジストの感度の無い波長の単色光を射出するHeNeレーザでも良い。白色光の光源を使用する場合は、ウエハ217上のアライメントマーク130を計測する時にウエハ217の表面に塗布してあるレジストと反応する波長を含んでいるので、不図示の光波長フィルタにて光の波長の制限を行う。
光源120aから射出された光はハーフミラー121aを通って対物レンズ122aからウエハ217上のアライメントマーク130を照明する。照明された光はウエハ217で反射し、反射光が対物レンズ122を通ってハーフミラー121にて今度は光路を90度曲げられて高分解能のセンサー140上にて像を結ぶように不図示の光学系が配置されている。因みに、従来のリソグラフィー装置では、アライメント計測は、第1方向(例えばX方向)と第2方向(例えばY方向)との両方について行うことから、図4に示すようなアライメント計測系の構成になっている。ウエハ217に対してパターンを高精度で重ね合わせて描画するためのずれ量を求めるため、XとYの両方向の計測が必要である。そのため、従来の高精度のウエハアライメント計測系102cは、それぞれの計測方向に対して、光源120cと光学系と2つのアライメントマーク130を個々に計測するための2つのセンサー140c、140c’が必要になっていた。光学系は、ハーフミラー121c、対物レンズ122c、ハーフミラー121c’、反射ミラー123cを含む。
図1Bの(b)に示される低精度のウエハアライメント計測系103の基本的な構成は、高精度のウエハアライメント計測系102と同様である。しかし、ウエハアライメント計測系103は、光学的な倍率が低く、また、ウエハアライメント計測系102が計測するアライメントマーク130とは異なるアライメントマーク131を計測する。さらには、ウエハアライメント計測系103は、アライメントマーク131を計測するのに分解能が低いセンサー141を使っている。また、ウエハアライメント計測系103は、X,Yの両方向のアライメントマーク131を一度に計測できるように2次元のセンサー141を使っている。
実施例1の描画装置では、ウエハ217をその表面に直交する軸の周りで回転可能で、ステージ制御回路225の指令により、ウエハステージ218へウエハ217を搭載するときにウエハ217の向きを合せる回転機構109も構成されている。実施例1では、回転機構109は、ウエハ217をウエハステージ218に搭載する前にウエハ217をプリアライメントするプリアライメント機構である。回転機構109は、図1Aに示されるように、ウエハ217を搭載して回転駆動とX,Y方向へのシフト駆動が可能なウエハ駆動部107とウエハ217の回転方向とXY方向の位置とを検出するウエハ検出部106とを有している。
ウエハ217の方向を合せる機構の動作を簡単に説明する。まず、ウエハ217をウエハ駆動部107へ搭載する。ウエハ駆動部107は、ウエハ217を回転させながらウエハ検出部106でウエハ217のノッチを検出する。ウエハ検出部106は、ウエハ駆動部107によりウエハ217を回転させかつシフトすることでノッチを正確に検出してウエハ217の位置を求める。なお、ウエハ検出部106が検出するものは、必ずしもウエハ217のノッチである必要は無く、例えば、ウエハ217上の任意のマークであっても良い。ウエハ駆動部107は、ウエハ217のノッチ検出位置を基準にして、任意の回転角度にウエハ217を回転する機能も搭載している。
このような描画装置におけるウエハアライメント処理の流れを、図3のフローチャートを使って説明する。まず初めに、S10で、ウエハ217が描画装置の外部から描画装置に搬送されてくる。描画装置に搬送されるときにはウエハ217には既にパターンを露光するために必要なレジストが塗布されている。また、ウエハ217には、既に下地の回路パターンとアライメントマークも形成されている。
次に、S11で、描画装置内に搬送されたウエハ217は、図1Aにて説明したように、初めにウエハ217をウエハステージ218へ搭載する方向を決めるために、ウエハ駆動部107によって、ウエハ217の向きとXY方向の位置が調整される。このとき、ウエハ217を高精度でアライメントさせたい方向が、高精度のウエハアライメント計測系102の計測方向と同じになるように、ウエハ217の向きがあわされる。
従って、ウエハ検出部106によりウエハ217のノッチを検出してウエハ217の向きが高精度のウエハアライメント計測系102の計測方向と合っていれば、S13で、制御部Cは、そのままの向きでウエハ217をウエハステージ218の上に置く。もし、違っていた場合、S12にて、制御部Cは、ノッチを検出した位置を基準に、ウエハアライメント計測系102の計測方向に合うようにウエハ217を回転してから、S13で、ウエハステージ218の上にウエハ217を置く。
ウエハステージ218に置かれて保持されたウエハ217に対して、まず初めに、S14で、低精度のウエハアライメント計測系103によりアライメントマーク131を用いてXY両方向のウエハアライメント計測を行う。S14で計測したウエハアライメント計測値を使って制御部Cはウエハ217の位置合わせを行う。これにより、高精度のウエハアライメント計測系102の計測範囲内に確実にアライメントマーク130が入るようになる。
S15で、高精度のウエハアライメント計測系102により、アライメントマーク130を用いて高精度のウエハアライメント計測を行う。S16で、制御部Cは、ウエハ217のX方向の位置を高精度のウエハアライメント計測値で補正し、Y方向の位置を低精度のウエハアライメント計測値で補正する。本実施例1では、X方向の位置を高精度で調整する方向としているが、Y方向を高精度で調整する方向としてもよい。
最後に、S17で、制御部Cは、位置合わせが行われたウエハ217上のパターンに対して描画パターンを重ね合せる。このとき、ウエハ217の回転方向に整合するように、描画するパターンも回転する必要がある。描画パターンは、制御部Cにより、ウエハ217の回転方向に整合するように回転処理されてから、S17で電子線を用いてパターンの描画が行なわれる。本実施例1では、回転機構109をプリアライメント機構として構成したが、回転機構109はウエハステージ218を回転する回転機構であってもよい。
[実施例2]
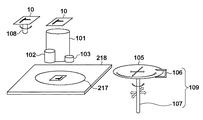
図5を用いて、リソグラフィー装置としてマスクに形成されたパターンを基板に投影して基板を露光する露光装置を使用する本発明の実施例2の説明を行う。図5は実施例2の露光装置のシステム構成を表した図である。基本的なシステム構成は実施例1で説明したシステム構成と同じである。ウエハステージ218にウエハ217を搭載し、ウエハ217上のアライメントマークを低精度のウエハアライメント計測系103によりXY両方向の計測を行い、高精度のウエハアライメント計測系102により一方向のアライメント計測だけを実施する。ウエハアライメント計測系103とウエハアライメント計測系102とによるアライメントデータを使ってウエハ217の位置合わせを行う。
図5を用いて、リソグラフィー装置としてマスクに形成されたパターンを基板に投影して基板を露光する露光装置を使用する本発明の実施例2の説明を行う。図5は実施例2の露光装置のシステム構成を表した図である。基本的なシステム構成は実施例1で説明したシステム構成と同じである。ウエハステージ218にウエハ217を搭載し、ウエハ217上のアライメントマークを低精度のウエハアライメント計測系103によりXY両方向の計測を行い、高精度のウエハアライメント計測系102により一方向のアライメント計測だけを実施する。ウエハアライメント計測系103とウエハアライメント計測系102とによるアライメントデータを使ってウエハ217の位置合わせを行う。
ウエハ駆動部107によりウエハ217を駆動してウエハのノッチを検出するウエハ検出部106によりウエハの位置を検出する。本実施例2では、パターンをウエハ217上に投影する投影系101は、光を投影する投影光学系である。マスク(原版、レチクルともいう)10上にはウエハ217に投影するパターンが形成されている。マスク10のパターンは、投影系101を介してウエハ217上に投影され、ウエハにパターンが転写される。
図3のS12で、基板上で高精度のウエハアライメントが要求され方向と高精度のウエハアライメント計測系102の計測方向とが一致するように、ウエハ検出部106とウエハ駆動部107とはウエハ217の向きを調整する。マスク駆動部108は、調整されたウエハ217の向きと整合するように、S12でマスク10の向きを回転させてからS13でマスク10をマスクステージに搭載する。このようにウエハ217とマスク10との向きを調整した後、実施例1と同様のウエハアライメント計測処理を行って、ウエハ217上のパターンとマスク10上のパターンの重ね合わせを行い、露光を行う。
[物品の製造方法]
本発明の好適な実施形態の物品の製造方法は、例えば、半導体デバイスや原版(例えば、レチクルまたはマスクとも呼ばれうる)などの物品の製造に好適である。該製造方法は、感光剤が塗布された基板に上記のリソグラフィー装置を用いてパターンを形成する工程と、前記工程で前記パターンを形成された基板を加工(例えば、現像)する工程とを含みうる。さらに、デバイスを製造する場合において、該製造方法は、他の周知の工程(酸化、成膜、蒸着、ドーピング、平坦化、エッチング、レジスト剥離、ダイシング、ボンディング、パッケージング等)を含みうる。
本発明の好適な実施形態の物品の製造方法は、例えば、半導体デバイスや原版(例えば、レチクルまたはマスクとも呼ばれうる)などの物品の製造に好適である。該製造方法は、感光剤が塗布された基板に上記のリソグラフィー装置を用いてパターンを形成する工程と、前記工程で前記パターンを形成された基板を加工(例えば、現像)する工程とを含みうる。さらに、デバイスを製造する場合において、該製造方法は、他の周知の工程(酸化、成膜、蒸着、ドーピング、平坦化、エッチング、レジスト剥離、ダイシング、ボンディング、パッケージング等)を含みうる。
以上、本発明の実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形または変更が可能である。例えば、以下のような変形または変更が可能である。リソグラフィー装置は、以上に例示したものには限定されない。例えば、基板上のインプリント剤(例えば樹脂)を型で成形して当該基板上にパターンを形成する(基板にパターンを転写する)インプリント装置であってもよい。なお、インプリント装置を用いた物品の製造方法では、上述の加工工程は、残膜(residual layer)を除去する工程または他の周知の加工工程としうる。
Claims (6)
- リソグラフィー装置であって、
基板を回転させる回転機構と、
前記基板に形成されたアライメントマークの第1方向における位置を第1精度で計測する第1計測部と、
前記基板に形成されたアライメントマークの第2方向における位置を前記第1精度より高い第2精度で計測する第2計測部と、
前記第1方向および前記第2方向においてそれぞれ要求される重ね合わせ精度が異なる前記基板を、前記重ね合わせ精度が高い前記基板の方向が前記第2方向に合うように前記回転機構を制御する制御部と、
を備えることを特徴とするリソグラフィー装置。 - 前記基板を保持する基板ステージを備え、
前記回転機構は、前記基板ステージの上に前記基板を置く前に前記基板を回転させる、ことを特徴とする請求項1に記載のリソグラフィー装置。 - 前記基板を保持する基板ステージを備え、
前記回転機構は、前記基板ステージを回転させる、ことを特徴とする請求項1に記載のリソグラフィー装置。 - 前記リソグラフィー装置は、荷電粒子線で基板に描画を行う描画装置であり、
前記制御部は、前記回転機構による前記基板の回転に整合するように、前記描画に用いるデータを変更する、ことを特徴とする請求項1ないし請求項3のいずれか1項に記載のリソグラフィー装置。 - 前記リソグラフィー装置は、マスクに形成されたパターンを前記基板に投影して当該基板を露光する露光装置であり、
前記制御部は、前記回転機構による前記基板の回転に整合するように、前記マスクを回転させる、ことを特徴とする請求項1ないし請求項3のいずれか1項に記載のリソグラフィー装置。 - 物品を製造する方法であって、
請求項1ないし請求項5のいずれか1項に記載のリソグラフィー装置を用いて基板にパターンを形成する工程と、
前記工程で前記パターンを形成された前記基板を加工する工程と、
を含むことを特徴とする方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012011558A JP2013149928A (ja) | 2012-01-23 | 2012-01-23 | リソグラフィー装置および物品を製造する方法 |
| US13/739,196 US20130188165A1 (en) | 2012-01-23 | 2013-01-11 | Lithography apparatus, and method of manufacturing article |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012011558A JP2013149928A (ja) | 2012-01-23 | 2012-01-23 | リソグラフィー装置および物品を製造する方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013149928A true JP2013149928A (ja) | 2013-08-01 |
| JP2013149928A5 JP2013149928A5 (ja) | 2015-03-05 |
Family
ID=48796959
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012011558A Abandoned JP2013149928A (ja) | 2012-01-23 | 2012-01-23 | リソグラフィー装置および物品を製造する方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20130188165A1 (ja) |
| JP (1) | JP2013149928A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014045041A (ja) * | 2012-08-24 | 2014-03-13 | Sharp Corp | 露光装置、露光方法、および電子デバイス製造方法 |
| JP2017520786A (ja) * | 2014-06-25 | 2017-07-27 | インテル・コーポレーション | 機能セルのコンパクトアレイを形成するための技術 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6791051B2 (ja) * | 2017-07-28 | 2020-11-25 | 株式会社ニューフレアテクノロジー | マルチ荷電粒子ビーム描画装置及びマルチ荷電粒子ビーム描画方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5151750A (en) * | 1989-04-14 | 1992-09-29 | Nikon Corporation | Alignment apparatus |
| JPH04304615A (ja) * | 1991-04-01 | 1992-10-28 | Hitachi Ltd | 荷電粒子線描画装置及び方法 |
| US6225012B1 (en) * | 1994-02-22 | 2001-05-01 | Nikon Corporation | Method for positioning substrate |
| JPH08227839A (ja) * | 1995-02-20 | 1996-09-03 | Nikon Corp | 移動鏡曲がりの計測方法 |
| US5648854A (en) * | 1995-04-19 | 1997-07-15 | Nikon Corporation | Alignment system with large area search for wafer edge and global marks |
| KR100525521B1 (ko) * | 1996-10-21 | 2006-01-27 | 가부시키가이샤 니콘 | 노광장치및노광방법 |
| JP4366031B2 (ja) * | 2001-09-17 | 2009-11-18 | キヤノン株式会社 | 位置検出装置及び方法並びに露光装置、デバイスの製造方法 |
-
2012
- 2012-01-23 JP JP2012011558A patent/JP2013149928A/ja not_active Abandoned
-
2013
- 2013-01-11 US US13/739,196 patent/US20130188165A1/en not_active Abandoned
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014045041A (ja) * | 2012-08-24 | 2014-03-13 | Sharp Corp | 露光装置、露光方法、および電子デバイス製造方法 |
| JP2017520786A (ja) * | 2014-06-25 | 2017-07-27 | インテル・コーポレーション | 機能セルのコンパクトアレイを形成するための技術 |
| US10217732B2 (en) | 2014-06-25 | 2019-02-26 | Intel Corporation | Techniques for forming a compacted array of functional cells |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130188165A1 (en) | 2013-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011060919A (ja) | 露光装置およびデバイス製造方法 | |
| JP6391337B2 (ja) | リソグラフィ装置、リソグラフィ方法、および物品の製造方法 | |
| JP2018072541A (ja) | パターン形成方法、基板の位置決め方法、位置決め装置、パターン形成装置、及び、物品の製造方法 | |
| US11640118B2 (en) | Method of pattern alignment for field stitching | |
| US10031429B2 (en) | Method of obtaining position, exposure method, and method of manufacturing article | |
| US6639677B1 (en) | Position measuring method and position measuring system using the same | |
| TWI460559B (zh) | 用於微影裝置之位階感測器配置、微影裝置及器件製造方法 | |
| JP2013149928A (ja) | リソグラフィー装置および物品を製造する方法 | |
| CN111338186B (zh) | 决定方法、曝光方法、曝光装置以及物品制造方法 | |
| JP4227470B2 (ja) | 位置検出方法 | |
| US20200089125A1 (en) | Method for of Measuring a Parameter Relating to a Structure Formed Using a Lithographic Process | |
| US8174673B2 (en) | Method for wafer alignment | |
| US7764357B2 (en) | Exposure apparatus and device manufacturing method | |
| CN113168112A (zh) | 测量与使用光刻过程形成的结构有关的聚焦参数的方法 | |
| JP2000012455A (ja) | 荷電粒子線転写露光装置及び荷電粒子線転写露光装置におけるマスクと感応基板の位置合わせ方法 | |
| JP2006030021A (ja) | 位置検出装置及び位置検出方法 | |
| JP2009170559A (ja) | 露光装置およびデバイス製造方法 | |
| US11927892B2 (en) | Alignment method and associated alignment and lithographic apparatuses | |
| US20240111214A1 (en) | Novel interface definition for lithographic apparatus | |
| JP2005303043A (ja) | 位置検出方法とその装置、位置合わせ方法とその装置、露光方法とその装置、及び、位置検出プログラム | |
| US20160139515A1 (en) | Lithography apparatus, lithography method, and article manufacturing method | |
| JP2017090778A (ja) | 露光方法及び物品の製造方法 | |
| JP4418665B2 (ja) | 測定装置、並びに、それを利用した露光装置 | |
| TW202232620A (zh) | 監控微影製程之方法及相關裝置 | |
| JP2004029372A (ja) | マスク、結像特性計測方法、露光方法、及びデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150120 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20150709 |