JP2013013603A - 洗濯機 - Google Patents
洗濯機 Download PDFInfo
- Publication number
- JP2013013603A JP2013013603A JP2011149120A JP2011149120A JP2013013603A JP 2013013603 A JP2013013603 A JP 2013013603A JP 2011149120 A JP2011149120 A JP 2011149120A JP 2011149120 A JP2011149120 A JP 2011149120A JP 2013013603 A JP2013013603 A JP 2013013603A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- water tank
- washing
- control means
- washing machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Main Body Construction Of Washing Machines And Laundry Dryers (AREA)
- Control Of Washing Machine And Dryer (AREA)
Abstract
【解決手段】本実施形態の洗濯機は、外箱の内部に揺動可能に配設された水槽と、この水槽の内部に縦軸周りに回転可能に配設され、内部に収容される洗濯物の洗い、脱水を行う縦軸形の回転槽と、この回転槽内に回転可能に配設され、洗い時にモータにより回転されて洗濯物を撹拌する撹拌体と、水槽に設けられ、当該水槽の揺れを検知する加速度センサと、前記モータを制御する制御手段と、を備える。制御手段は、モータにより撹拌体を回転させて行う洗い行程時において加速度センサの検出値が予め設定されたしきい値を超えた場合に前記モータの制御内容を変更する。
【選択図】図1
Description
(第1実施形態)
まず、第1実施形態について図1〜図6を参照して説明する。図1および図2には、縦軸形の洗濯機(脱水兼用洗濯機)の概略構成が示されている。この洗濯機の外殻を構成する外箱1は、矩形箱状をなし、底部に脚部2が設けられ、上部には合成樹脂製のトップカバー3が装着されている。外箱1の内部には、有底円筒状をなす水槽4が縦軸状態(軸線方向が上下方向)で、防振装置としての弾性支持機構5を介して揺動可能に配設されている。弾性支持機構5は、図1および図2に示すように、外箱1の四隅部に設けられた4本の吊り棒5aとスプリング5bとを主体に構成されたもので、水槽4を弾性的に吊り下げ支持した構成となっている。
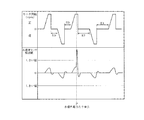
図7は第2実施形態を示している。この第2実施形態は、上記した第1実施形態とは次の点が異なっている。すなわち、制御装置43は、洗い行程において、加速度センサ42による検出値が予め設定されたしきい値以上となった場合に(図4のステップS8で「YES」)、モータ23の制御の変更内容として、モータ23の起動開始から最大回転速度に到達するまでの時間D1を、それまでの時間D0よりも長くなるように変更する(D1>D0)。これにより、モータ23より回転される撹拌体22がそれ以前よりも緩やかに立ち上がるようになるので、撹拌体22が洗濯物に与える衝撃力が減少し、水槽4の揺れが抑えられる。これによっても、水槽4が外箱1に当たるような振動が継続して発生することを防止することが可能になる。
図8は第3実施形態を示している。この第3実施形態は、上記した第1実施形態および第2実施形態とは次の点が異なっている。すなわち、制御装置43は、洗い行程において、加速度センサ42による検出値が予め設定されたしきい値以上となった場合に(図4のステップS8で「YES」)、モータ23の制御の変更内容として、モータ23の停止時間E1を、それまでの停止時間E0よりも長くなるように変更する(E1>E0)。
図9は第4実施形態を示している。この第4実施形態は、上記した第1〜第3実施形態とは次の点が異なっている。すなわち、制御装置43は、洗い行程において、加速度センサ42による検出値が予め設定されたしきい値以上となった場合に(図4のステップS8で「YES」)、モータ23の制御の変更内容として、加速度センサ42の検出値が前記しきい値以上となった際のモータ23の回転方向のみ、モータ23の最大回転速度をC1分低くする。具体的には、加速度センサ42の検出値が前記しきい値以上となった際のモータ23の回転方向が正転方向で発生した場合には、モータ23の正回転方向のみ、モータ23の最大回転速度をC1分低くする。モータ23の逆回転方向の最大回転速度は変更しない。
図10は第5実施形態を示している。この第5実施形態は、上記した第1〜第4実施形態とは次の点が異なっている。すなわち、制御装置43は、洗い行程において、加速度センサ42による検出値が予め設定されたしきい値以上となった場合に(ステップS8で「YES」)、モータ23(撹拌体22)の制御内容を変更、例えばモータ23(撹拌体22)の最大回転速度を低下させる変更をする(ステップS9)とともに、水槽4内の水位を変更する(ステップS21)。水位の変更は、具体的には、給水弁17を開放して水槽4内の水量を所定量増加させる(追加給水)。これにより、水槽4が大きく振動した際に、モータ23(撹拌体22)の制御内容を変更することで、水槽4の大きな振動を抑えながらも、水槽4内(回転槽16内)の水量を増加させることで、洗濯物が動き易くなり、洗濯物の汚れも落ちやすくなり、洗い性能の低下を抑えることが可能になる。
図11は第6実施形態を示している。この第6実施形態は、上記した第1〜第5実施形態とは次の点が異なっている。すなわち、制御装置43は、洗い行程において、加速度センサ42による検出値が予め設定されたしきい値以上となった場合に(ステップS8で「YES」)、モータ23(撹拌体22)の制御内容を変更、例えばモータ23(撹拌体22)の最大回転速度を低下させる変更をする(ステップS9)とともに、洗い時間を変更する(ステップS22)。洗い時間の変更は、具体的には、予め設定された洗いの設定時間に、所定時間加え、洗い時間を長くする。モータ23(撹拌体22)の最大回転速度を低下させることで、洗い性能が低下することが懸念されるが、その分、洗い時間を長くすることで、洗い性能の低下を抑えることが可能になる。
図12は第7実施形態を示している。この第7実施形態は、上記した第1〜第6実施形態とは次の点が異なっている。すなわち、制御装置43は、洗い行程において、加速度センサ42による検出値が予め設定されたしきい値以上となった場合に(ステップS8で「YES」)、モータ23(撹拌体22)の制御内容を変更(ステップS9)する前に、ほぐし動作を行う(ステップS23)。ほぐし動作としては、例えばモータ23(撹拌体22)の回転周期を、通常の撹拌の周期よりも短い、短周期とする。モータ23(撹拌体22)の制御内容の変更としては、例えばモータ23(撹拌体22)の最大回転速度を低下させる変更をする。
加速度センサ42としては、3軸タイプに限られず、1軸タイプあるいは2軸タイプのものでもよい。安全レバースイッチ装置40は、必要に応じて設ければよい。
洗濯機としては、乾燥機能のないものでもよい。
Claims (8)
- 外箱の内部に揺動可能に配設された水槽と、
この水槽の内部に縦軸周りに回転可能に配設され、内部に収容される洗濯物の洗い、脱水を行う縦軸形の回転槽と、
この回転槽内に回転可能に配設され、前記洗い時にモータにより回転されて前記洗濯物を撹拌する撹拌体と、
前記水槽に設けられ、当該水槽の揺れを検知する加速度センサと、
前記モータを制御する制御手段と、を備え、
前記制御手段は、前記モータにより前記撹拌体を回転させて行う洗い行程時において前記加速度センサの検出値が予め設定されたしきい値以上となった場合に前記モータの制御内容を変更することを特徴とする洗濯機。 - 前記制御手段が変更する前記モータの制御内容は、前記モータの最大回転速度であることを特徴とする請求項1記載の洗濯機。
- 前記制御手段が変更する前記モータの制御内容は、前記モータの起動開始から最大回転速度に到達するまでの時間であることを特徴とする請求項1記載の洗濯機。
- 前記制御手段が変更する前記モータの制御内容は、前記モータの回転停止時間であることを特徴とする請求項1記載の洗濯機。
- 前記制御手段は、前記洗い行程時において前記加速度センサの検出値が予め設定されたしきい値以上となった際の前記モータの回転方向のみ当該モータの制御内容を変更することを特徴とする請求項1〜4のいずれか一項記載の洗濯機。
- 前記制御手段は、前記洗い行程時において前記モータの制御内容を変更する際に、前記水槽内に貯留される水量も変更することを特徴とする請求項1〜5のいずれか一項記載の洗濯機。
- 前記制御手段は、前記洗い行程時において前記モータの制御内容を変更する際に、洗い行程の時間も変更することを特徴とする請求項1〜6のいずれか一項記載の洗濯機。
- 前記制御手段は、前記洗い行程時において前記モータの制御内容を変更する前にほぐし動作を行うことを特徴とする請求項1〜7のいずれか一項記載の洗濯機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011149120A JP2013013603A (ja) | 2011-07-05 | 2011-07-05 | 洗濯機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011149120A JP2013013603A (ja) | 2011-07-05 | 2011-07-05 | 洗濯機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013013603A true JP2013013603A (ja) | 2013-01-24 |
| JP2013013603A5 JP2013013603A5 (ja) | 2014-12-11 |
Family
ID=47686880
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011149120A Pending JP2013013603A (ja) | 2011-07-05 | 2011-07-05 | 洗濯機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013013603A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016000083A (ja) * | 2014-06-11 | 2016-01-07 | 株式会社東芝 | 洗濯機 |
| CN112601851A (zh) * | 2018-11-26 | 2021-04-02 | 青岛海尔洗衣机有限公司 | 脱水机 |
| CN113994042A (zh) * | 2019-06-20 | 2022-01-28 | 青岛海尔洗衣机有限公司 | 洗衣机 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6361037B2 (ja) * | 1981-09-28 | 1988-11-28 | ||
| JPH04244191A (ja) * | 1991-01-28 | 1992-09-01 | Toshiba Corp | 洗濯機等のタイマー装置 |
| JPH08336692A (ja) * | 1995-06-14 | 1996-12-24 | Toshiba Corp | 全自動洗濯機 |
| JP2000288289A (ja) * | 1999-04-02 | 2000-10-17 | Sanyo Electric Co Ltd | 洗濯機、及び回転容器を備える装置 |
| JP2003071182A (ja) * | 2001-08-31 | 2003-03-11 | Toshiba Corp | 洗濯機 |
| JP2003071181A (ja) * | 2001-09-05 | 2003-03-11 | Toshiba Corp | 洗濯機 |
| JP2003334396A (ja) * | 2002-05-21 | 2003-11-25 | Hitachi Home & Life Solutions Inc | 洗濯機 |
| JP2004242735A (ja) * | 2003-02-12 | 2004-09-02 | Sanyo Electric Co Ltd | 洗濯機 |
| JP2004337368A (ja) * | 2003-05-15 | 2004-12-02 | Sharp Corp | 洗濯機 |
| JP2004344338A (ja) * | 2003-05-21 | 2004-12-09 | Hitachi Home & Life Solutions Inc | 洗濯機 |
| JP2005274443A (ja) * | 2004-03-25 | 2005-10-06 | Star Micronics Co Ltd | 振動検出機構および振動検出方法 |
| JP2012223439A (ja) * | 2011-04-21 | 2012-11-15 | Panasonic Corp | 洗濯機 |
-
2011
- 2011-07-05 JP JP2011149120A patent/JP2013013603A/ja active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6361037B2 (ja) * | 1981-09-28 | 1988-11-28 | ||
| JPH04244191A (ja) * | 1991-01-28 | 1992-09-01 | Toshiba Corp | 洗濯機等のタイマー装置 |
| JPH08336692A (ja) * | 1995-06-14 | 1996-12-24 | Toshiba Corp | 全自動洗濯機 |
| JP2000288289A (ja) * | 1999-04-02 | 2000-10-17 | Sanyo Electric Co Ltd | 洗濯機、及び回転容器を備える装置 |
| JP2003071182A (ja) * | 2001-08-31 | 2003-03-11 | Toshiba Corp | 洗濯機 |
| JP2003071181A (ja) * | 2001-09-05 | 2003-03-11 | Toshiba Corp | 洗濯機 |
| JP2003334396A (ja) * | 2002-05-21 | 2003-11-25 | Hitachi Home & Life Solutions Inc | 洗濯機 |
| JP2004242735A (ja) * | 2003-02-12 | 2004-09-02 | Sanyo Electric Co Ltd | 洗濯機 |
| JP2004337368A (ja) * | 2003-05-15 | 2004-12-02 | Sharp Corp | 洗濯機 |
| JP2004344338A (ja) * | 2003-05-21 | 2004-12-09 | Hitachi Home & Life Solutions Inc | 洗濯機 |
| JP2005274443A (ja) * | 2004-03-25 | 2005-10-06 | Star Micronics Co Ltd | 振動検出機構および振動検出方法 |
| JP2012223439A (ja) * | 2011-04-21 | 2012-11-15 | Panasonic Corp | 洗濯機 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016000083A (ja) * | 2014-06-11 | 2016-01-07 | 株式会社東芝 | 洗濯機 |
| CN112601851A (zh) * | 2018-11-26 | 2021-04-02 | 青岛海尔洗衣机有限公司 | 脱水机 |
| CN112601851B (zh) * | 2018-11-26 | 2022-03-04 | 青岛海尔洗衣机有限公司 | 脱水机 |
| CN113994042A (zh) * | 2019-06-20 | 2022-01-28 | 青岛海尔洗衣机有限公司 | 洗衣机 |
| CN113994042B (zh) * | 2019-06-20 | 2023-11-14 | 青岛海尔洗衣机有限公司 | 洗衣机 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008061856A (ja) | ドラム式洗濯機およびドラム式洗濯乾燥機 | |
| JP4580813B2 (ja) | ドラム式洗濯機におけるアンバランス位置検知方法及びアンバランス位置検知可能なドラム式脱水機 | |
| EP2557217B1 (en) | Drum-type washing machine | |
| JP2008054826A (ja) | ドラム式洗濯機 | |
| JP6139161B2 (ja) | 洗濯機 | |
| JP5753974B2 (ja) | ドラム式洗濯機 | |
| JP2008194090A (ja) | 洗濯機 | |
| JP2008246230A (ja) | 洗濯乾燥機 | |
| JP2009100985A (ja) | 洗濯機 | |
| JP5784532B2 (ja) | 洗濯機 | |
| JP2007282962A (ja) | ドラム式洗濯機またはドラム式洗濯乾燥機 | |
| JP2013013603A (ja) | 洗濯機 | |
| JP5768209B2 (ja) | ドラム式洗濯機 | |
| JP4906770B2 (ja) | ドラム式洗濯機 | |
| CN105297332B (zh) | 洗衣机 | |
| JP2010284288A (ja) | 洗濯機 | |
| JP4851910B2 (ja) | ドラム式洗濯機 | |
| JP2011224227A (ja) | 洗濯機 | |
| JP4921104B2 (ja) | ドラム式洗濯機 | |
| JP7222607B2 (ja) | 洗濯機 | |
| JP2013103058A (ja) | ドラム式洗濯機 | |
| JP5035324B2 (ja) | ドラム式洗濯乾燥機 | |
| JP6807698B2 (ja) | ドラム式洗濯機及びドラム式洗濯乾燥機 | |
| JP2010119807A (ja) | ドラム式洗濯機 | |
| JP2011229689A (ja) | 洗濯機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20140131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140415 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141024 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150428 |