JP2012204723A - 荷電粒子線描画方法、およびそれを用いた物品の製造方法 - Google Patents
荷電粒子線描画方法、およびそれを用いた物品の製造方法 Download PDFInfo
- Publication number
- JP2012204723A JP2012204723A JP2011069409A JP2011069409A JP2012204723A JP 2012204723 A JP2012204723 A JP 2012204723A JP 2011069409 A JP2011069409 A JP 2011069409A JP 2011069409 A JP2011069409 A JP 2011069409A JP 2012204723 A JP2012204723 A JP 2012204723A
- Authority
- JP
- Japan
- Prior art keywords
- region
- charged particle
- particle beam
- self
- calibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Electron Beam Exposure (AREA)
Abstract
【解決手段】荷電粒子線を用いて被処理体にパターンを描画する荷電粒子線描画方法であって、被処理体の描画領域として第1領域と第2領域とを設定する工程と、第1領域の描画を行うとともに、該第1領域の描画の開始から終了までの間に荷電粒子線の位置ずれ量を補正するための第1キャリブレーションを行う工程(S100〜S103)と、第2領域の描画を行うとともに、該第2領域の描画の開始から終了までの間に荷電粒子線の位置ずれ量を補正するための第2キャリブレーション(S104〜S107)を行う工程とを有する。このとき、第1キャリブレーションと第2キャリブレーションとを行う頻度が異なる。
【選択図】図3
Description
本発明の実施形態に係る物品の製造方法は、例えば、半導体デバイスなどのマイクロデバイスや微細構造を有する素子などの物品を製造するのに好適である。該製造方法は、感光剤が塗布された基板(原版)の該感光剤に上記の描画装置を用いて潜像パターンを形成する工程(基板に描画を行う工程)と、該工程で潜像パターンが形成された基板を現像する工程とを含み得る。さらに、該製造方法は、他の周知の工程(酸化、成膜、蒸着、ドーピング、平坦化、エッチング、レジスト剥離、ダイシング、ボンディング、パッケージングなど)を含み得る。本実施形態の物品の製造方法は、従来の方法に比べて、物品の性能・品質・生産性・生産コストの少なくとも1つにおいて有利である。
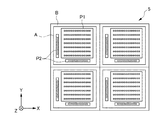
3 電子ビーム
5 原版
6 ステージ
A 領域
B スクライブ領域
P1 第1パターン群
P2 第2パターン群
Claims (5)
- 荷電粒子線を用いて被処理体にパターンを描画する荷電粒子線描画方法であって、
前記被処理体の描画領域として第1領域と第2領域とを設定する工程と、
前記第1領域の描画を行うとともに、該第1領域の描画の開始から終了までの間に前記荷電粒子線の位置ずれ量を補正するための第1キャリブレーションを行う工程と、
前記第2領域の描画を行うとともに、該第2領域の描画の開始から終了までの間に前記荷電粒子線の位置ずれ量を補正するための第2キャリブレーションを行う工程と、
を有し、
前記第1キャリブレーションと前記第2キャリブレーションとを行う頻度が異なることを特徴とする荷電粒子線描画方法。 - 前記第1領域と前記第2領域とで、前記荷電粒子線の入射位置と前記被処理体の表面上の描画位置との重ね合わせ精度が異なり、
前記第1領域、または前記第2領域のいずれか一方の領域では、該領域に形成されるパターンの線幅に対して要求される前記重ね合わせ精度が低く、一方、
他の領域では、該領域に形成されるパターンの線幅に対して要求される前記重ね合わせ精度が高いことを特徴とする請求項1に記載の荷電粒子線描画方法。 - 前記重ね合わせ精度が低い方の領域は、セルフアライメント領域であることを特徴とする請求項2に記載の荷電粒子線描画方法。
- 前記重ね合わせ精度が高い方の領域は、非セルフアライメント領域であることを特徴とする請求項2に記載の荷電粒子線描画方法。
- 請求項1ないし4のいずれか1項に記載の荷電粒子線描画装置を用いて被処理体に描画を行う工程と、
前記工程で描画を行われた被処理体を現像する工程と、
を含むことを特徴とする物品の製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011069409A JP5812642B2 (ja) | 2011-03-28 | 2011-03-28 | 荷電粒子線描画方法、およびそれを用いた物品の製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011069409A JP5812642B2 (ja) | 2011-03-28 | 2011-03-28 | 荷電粒子線描画方法、およびそれを用いた物品の製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012204723A true JP2012204723A (ja) | 2012-10-22 |
| JP2012204723A5 JP2012204723A5 (ja) | 2014-05-01 |
| JP5812642B2 JP5812642B2 (ja) | 2015-11-17 |
Family
ID=47185326
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011069409A Expired - Fee Related JP5812642B2 (ja) | 2011-03-28 | 2011-03-28 | 荷電粒子線描画方法、およびそれを用いた物品の製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5812642B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5555533A (en) * | 1978-10-18 | 1980-04-23 | Chiyou Lsi Gijutsu Kenkyu Kumiai | Method of manufacturing semiconductor device |
| JPH09260247A (ja) * | 1996-03-22 | 1997-10-03 | Hitachi Ltd | パタン転写方法及びパタン転写用データの作成方法 |
| JPH10294260A (ja) * | 1997-04-18 | 1998-11-04 | Nec Corp | 露光描画装置、露光描画方法及び露光描画処理プログラムを記録した記録媒体 |
| JPH118171A (ja) * | 1997-06-16 | 1999-01-12 | Hitachi Ltd | 電子ビーム露光装置のビームドリフト補正方法およびそれを用いた半導体集積回路装置の製造方法 |
| JP2001318455A (ja) * | 2000-05-12 | 2001-11-16 | Hitachi Ltd | 半導体集積回路装置の製造方法 |
| JP2005129688A (ja) * | 2003-10-23 | 2005-05-19 | Hitachi Ltd | 半導体装置の製造方法 |
| JP2007043083A (ja) * | 2005-07-04 | 2007-02-15 | Nuflare Technology Inc | 電子ビームのビームドリフト補正方法及び電子ビームの描画方法 |
-
2011
- 2011-03-28 JP JP2011069409A patent/JP5812642B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5555533A (en) * | 1978-10-18 | 1980-04-23 | Chiyou Lsi Gijutsu Kenkyu Kumiai | Method of manufacturing semiconductor device |
| JPH09260247A (ja) * | 1996-03-22 | 1997-10-03 | Hitachi Ltd | パタン転写方法及びパタン転写用データの作成方法 |
| JPH10294260A (ja) * | 1997-04-18 | 1998-11-04 | Nec Corp | 露光描画装置、露光描画方法及び露光描画処理プログラムを記録した記録媒体 |
| JPH118171A (ja) * | 1997-06-16 | 1999-01-12 | Hitachi Ltd | 電子ビーム露光装置のビームドリフト補正方法およびそれを用いた半導体集積回路装置の製造方法 |
| JP2001318455A (ja) * | 2000-05-12 | 2001-11-16 | Hitachi Ltd | 半導体集積回路装置の製造方法 |
| JP2005129688A (ja) * | 2003-10-23 | 2005-05-19 | Hitachi Ltd | 半導体装置の製造方法 |
| JP2007043083A (ja) * | 2005-07-04 | 2007-02-15 | Nuflare Technology Inc | 電子ビームのビームドリフト補正方法及び電子ビームの描画方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5812642B2 (ja) | 2015-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4213907B2 (ja) | リソグラフィーシステムのフォーカス精度を向上させるための方法およびシステム | |
| KR101988084B1 (ko) | 노광 장치 및 디바이스의 제조 방법 | |
| US7202488B2 (en) | Correction system, method of correcting deflection distortion, program and method for manufacturing a semiconductor device | |
| JP2012104853A (ja) | リソグラフィ装置および二重露光オーバレイ制御を用いたデバイス製造方法 | |
| JP5068844B2 (ja) | リソグラフィ方法及びリソグラフィ装置 | |
| JP2014120746A (ja) | 描画装置、および物品の製造方法 | |
| US20140209818A1 (en) | Lithography apparatus, lithography method, and method of manufacturing article | |
| JP2016001708A (ja) | リソグラフィ装置、及び物品の製造方法 | |
| EP3396457A1 (en) | Device manufacturing method | |
| JP6251648B2 (ja) | 荷電粒子ビーム描画装置および荷電粒子ビーム描画方法 | |
| JP5812642B2 (ja) | 荷電粒子線描画方法、およびそれを用いた物品の製造方法 | |
| JP2010074043A (ja) | 半導体製造方法および半導体製造装置 | |
| US6559927B1 (en) | Gap adjusting method in exposure apparatus | |
| US9606460B2 (en) | Lithography apparatus, and method of manufacturing article | |
| CN111771167B (zh) | 光刻工艺中的对齐标记定位 | |
| JP2009177126A (ja) | マスクブランクス、マスク、マスク保持装置、露光装置及びデバイスの製造方法 | |
| JP2005116849A (ja) | 静電吸着装置及び方法、露光装置、デバイスの製造方法 | |
| CN111413850B (zh) | 曝光装置、用于控制曝光装置的方法、以及物品制造方法 | |
| US11709434B2 (en) | Device manufacturing method | |
| JP2007329267A (ja) | 荷電粒子線描画装置及び荷電粒子線描画方法 | |
| JP4677180B2 (ja) | 半導体製造装置およびデバイス製造方法 | |
| JP2005063993A (ja) | 半導体デバイスの製造方法および製造システム | |
| EP4298481A1 (en) | Novel interface definition for lithographic apparatus | |
| JP4387700B2 (ja) | マスク検査方法、マスク製造方法および露光方法 | |
| JP2002334833A (ja) | 荷電ビーム露光装置及び露光方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140313 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150616 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150730 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150818 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150915 |
|
| LAPS | Cancellation because of no payment of annual fees |