JP2012144240A - 二輪車用車両制御装置及びその方法 - Google Patents
二輪車用車両制御装置及びその方法 Download PDFInfo
- Publication number
- JP2012144240A JP2012144240A JP2011189384A JP2011189384A JP2012144240A JP 2012144240 A JP2012144240 A JP 2012144240A JP 2011189384 A JP2011189384 A JP 2011189384A JP 2011189384 A JP2011189384 A JP 2011189384A JP 2012144240 A JP2012144240 A JP 2012144240A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- vehicle control
- speed
- motorcycle
- wheelie
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1701—Braking or traction control means specially adapted for particular types of vehicles
- B60T8/1706—Braking or traction control means specially adapted for particular types of vehicles for single-track vehicles, e.g. motorcycles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/176—Brake regulation specially adapted to prevent excessive wheel slip during vehicle deceleration, e.g. ABS
- B60T8/1766—Proportioning of brake forces according to vehicle axle loads, e.g. front to rear of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Regulating Braking Force (AREA)
Abstract
【解決手段】自動二輪車のブレーキの制御を行う二輪車用車両制御装置において、ECUは、前後輪の速度比(vR/vF)を用いてウィリー状態を判定する(ステップS204、S212)。
【選択図】図2
Description
自動二輪車ではABSの誤作動を防止するために、低い車輪速度に推定車体速度を追従させるのが一般的である。そのためウィリー走行終了後、車体速度が低く推定されているために適切なABSの制御が行えず、最悪車輪ロックしたり車体安定性が低下するおそれがある。そこで、ウィリー走行後にABSを適切に作動することを目的として、特開2007−203867号公報の装置が提案されている。
〔第1の実施形態〕
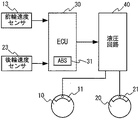
第1の実施形態は、ウィリー走行におけるABS制御用推定車体速度の設定に関する。図1に示すように、第1の実施形態に係る自動二輪車は、前輪10に設けられた前輪ブレーキ11と、後輪20に設けられた後輪ブレーキ21と、前輪10の車輪速度を検知する前輪速度センサ13と、後輪20の車輪速度を検知する後輪速度センサ23とを備える。さらに、前輪速度センサ13、後輪速度センサ23の検知した速度信号は、ECU(電子制御ユニット)30に送信され、ECU30はこれらから推定車体速度を設定する。
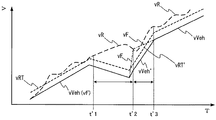
ステップS204では、速度比vR/vFが、第1パラメータPara1(vF)以上か否かを判定し、Para1(vF)以上ならステップS205に移行し、Para1(vF)以上でないなら、ステップS210に移行する。
なお、速度比としては、本実施形態ではvR/vFを用いたが、vF/vRでもよい。図2のステップS204〜S207、S209では、「≧」を用いたが、「>」を用いてもよく、ステップS212では、「≦」を用いたが「<」を用いてよい。
(b)後輪速度が推定車体速度以上である、即ち、vR≧vVeh(ステップS205)
(c)前輪速度と後輪速度の速度比が「1.0」からある閾値より外れる(ステップS204)。即ち、vR/vF≧(1.0+閾値)=Para1となる。この閾値は、前輪速度に依存する。
第2の実施形態は、ウィリー走行におけるTCS制御用推定車体速度の設定に関する。第2の実施形態において、第1の実施形態と同一部分には同一符号を付して説明は省略する。なお、第2の実施形態におけるウィリー検知及びウィリー終了検知は、第1の実施形態と同様に行われる。
11 前輪ブレーキ
13 前輪速度センサ
20 後輪
21 後輪ブレーキ
23 後輪速度センサ
30 ECU
31 ABS制御部
32 TCS制御部
40 液圧回路
50 エンジン
Claims (26)
- 自動二輪車のブレーキの制御を行う二輪車用車両制御装置において、
前輪速度と後輪速度の速度比を用いて、ウィリー状態を判定することを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
前記速度比を用いて、ウィリー開始及び/又はウィリー終了を判定することを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
前記速度比は、前記ウィリー開始を判定するための開始パラメータ及び/又は前記ウィリー終了を判定するための終了パラメータと比較され、前記開始パラメータ及び/又は前記終了パラメータは、前記前輪速度に応じて変化することを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
前記速度比が前記前輪速度に応じて変化する所定の条件を満たす場合に、前記ウィリー状態にあると判定することを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
ABSによる制御を行っていない場合に、前記ウィリー状態の判定を行うことを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
車体速度が所定の値より大きい場合に、前記ウィリー状態の判定を行うことを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
前記後輪速度が車体速度と等しいか又はより大きい場合に、前記ウィリー状態の判定を行うことを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
所定時間の間、前記ウィリー状態が維持された場合に、ウィリー状態にあると判定することを特徴とする二輪車用車両制御装置。 - 請求項1に記載の二輪車用車両制御装置において、
前記ウィリー状態が終了したと判定した場合に、車体速度を所定速度に設定することを特徴とする二輪車用車両制御装置。 - 請求項9に記載の二輪車用車両制御装置において、
前記所定速度に設定した後に、当該所定速度に基づきABSによる制御行うことを特徴とする二輪車用車両制御装置。 - 自動二輪車のブレーキの制御を行う二輪車用車両制御方法において、
前輪速度と後輪速度の速度比を用いて、ウィリー状態を判定することを特徴とする二輪車用車両制御方法。 - 請求項11に記載の二輪車用車両制御方法において、
前記速度比を用いて、ウィリー開始及び/又はウィリー終了を判定することを特徴とする二輪車用車両制御方法。 - 請求項11又は12に記載の二輪車用車両制御方法において、
前記速度比は、前記ウィリー開始を判定するための開始パラメータ及び/又は前記ウィリー終了を判定するための終了パラメータと比較され、前記開始パラメータ及び/又は前記終了パラメータは、前記前輪速度に応じて変化することを特徴とする二輪車用車両制御方法。 - 請求項11乃至13の何れか一項に記載の二輪車用車両制御方法において、
前記速度比が前記前輪速度に応じて変化する所定の条件を満たす場合に、前記ウィリー状態にあると判定することを特徴とする二輪車用車両制御方法。 - 請求項11乃至14の何れか一項に記載の二輪車用車両制御方法において、
ABSによる制御を行っていない場合に、前記ウィリー状態の判定を行うことを特徴とする二輪車用車両制御方法。 - 請求項11乃至15の何れか一項に記載の二輪車用車両制御方法において、
車体速度が所定の値より大きい場合に、前記ウィリー状態の判定を行うことを特徴とする二輪車用車両制御方法。 - 請求項11乃至16の何れか一項に記載の二輪車用車両制御方法において、
前記後輪速度が車体速度と等しいか又はより大きい場合に、前記ウィリー状態の判定を行うことを特徴とする二輪車用車両制御方法。 - 請求項11乃至17の何れか一項に記載の二輪車用車両制御方法において、
所定時間の間、前記ウィリー状態が維持された場合に、ウィリー状態にあると判定することを特徴とする二輪車用車両制御方法。 - 請求項11乃至18の何れか一項に記載の二輪車用車両制御方法において、
前記ウィリー状態が終了したと判定した場合に、車体速度を所定速度に設定することを特徴とする二輪車用車両制御方法。 - 請求項19に記載の二輪車用車両制御方法において、
前記所定速度に設定した後に、当該所定速度に基づきABSによる制御行うことを特徴とする二輪車用車両制御方法。 - 自動二輪車のブレーキの制御を行う二輪車用車両制御装置において、
ウィリー状態の終了を検知すると、車体速度制御に用いる推定車体速度を前輪速度又は後輪速度で初期化することを特徴とする二輪車用車両制御装置。 - 請求項21に記載の二輪車用車両制御装置において、
前記車体速度制御は、TCS制御であることを特徴とする二輪車用車両制御装置。 - 自動二輪車のブレーキの制御を行う二輪車用車両制御方法において、
ウィリー状態の終了を検知すると、車体速度制御に用いる推定車体速度を前輪速度又は後輪速度で初期化することを特徴とする二輪車用車両制御方法。 - 請求項23に記載の二輪車用車両制御方法において、
前記車体速度制御は、TCS制御であることを特徴とする二輪車用車両制御方法。 - 請求項11乃至20、23、24の何れか一項に記載の二輪車用車両制御方法を実行するプログラム。
- 請求項25に記載のプログラムを記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011189384A JP5749124B2 (ja) | 2010-12-20 | 2011-08-31 | 二輪車用車両制御装置及びその方法 |
| PCT/JP2012/065599 WO2013031342A1 (ja) | 2011-08-31 | 2012-06-19 | 二輪車用車両制御装置及びその方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010283209 | 2010-12-20 | ||
| JP2010283209 | 2010-12-20 | ||
| JP2011189384A JP5749124B2 (ja) | 2010-12-20 | 2011-08-31 | 二輪車用車両制御装置及びその方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012144240A true JP2012144240A (ja) | 2012-08-02 |
| JP5749124B2 JP5749124B2 (ja) | 2015-07-15 |
Family
ID=47755977
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011189384A Active JP5749124B2 (ja) | 2010-12-20 | 2011-08-31 | 二輪車用車両制御装置及びその方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5749124B2 (ja) |
| WO (1) | WO2013031342A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017071300A (ja) * | 2015-10-07 | 2017-04-13 | 川崎重工業株式会社 | ウィリー判定装置、乗物、および車輪浮上り量判定方法 |
| US9895972B2 (en) * | 2015-10-07 | 2018-02-20 | Kawasaki Jukogyo Kabushiki Kaisha | Wheelie suppressing device |
| JP2021054184A (ja) * | 2019-09-27 | 2021-04-08 | 本田技研工業株式会社 | 鞍乗型車両及び車速推定装置 |
| US11440614B2 (en) | 2019-03-19 | 2022-09-13 | Honda Motor Co., Ltd. | Motorcycle |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002070709A (ja) * | 2000-09-01 | 2002-03-08 | Yamaha Motor Co Ltd | 自動二輪車のウィリー防止装置 |
| JP2007203867A (ja) * | 2006-02-01 | 2007-08-16 | Nissin Kogyo Co Ltd | 二輪車用アンチロックブレーキ装置 |
| JP2008080956A (ja) * | 2006-09-27 | 2008-04-10 | Yamaha Motor Co Ltd | 鞍乗型車両の姿勢検知装置、エンジン制御装置、及び鞍乗型車両 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5028686B2 (ja) * | 2007-08-31 | 2012-09-19 | 本田技研工業株式会社 | 自動二輪車の変速制御装置 |
| JP2009214855A (ja) * | 2008-03-13 | 2009-09-24 | Hitachi Ltd | 自動二輪車のブレーキ装置および自動二輪車のブレーキ制御方法 |
| FR2946602A1 (fr) * | 2009-06-15 | 2010-12-17 | Bosch Gmbh Robert | Procede de commande d'un systeme de freinage. |
-
2011
- 2011-08-31 JP JP2011189384A patent/JP5749124B2/ja active Active
-
2012
- 2012-06-19 WO PCT/JP2012/065599 patent/WO2013031342A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002070709A (ja) * | 2000-09-01 | 2002-03-08 | Yamaha Motor Co Ltd | 自動二輪車のウィリー防止装置 |
| JP2007203867A (ja) * | 2006-02-01 | 2007-08-16 | Nissin Kogyo Co Ltd | 二輪車用アンチロックブレーキ装置 |
| JP2008080956A (ja) * | 2006-09-27 | 2008-04-10 | Yamaha Motor Co Ltd | 鞍乗型車両の姿勢検知装置、エンジン制御装置、及び鞍乗型車両 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017071300A (ja) * | 2015-10-07 | 2017-04-13 | 川崎重工業株式会社 | ウィリー判定装置、乗物、および車輪浮上り量判定方法 |
| US9895972B2 (en) * | 2015-10-07 | 2018-02-20 | Kawasaki Jukogyo Kabushiki Kaisha | Wheelie suppressing device |
| US11440614B2 (en) | 2019-03-19 | 2022-09-13 | Honda Motor Co., Ltd. | Motorcycle |
| JP2021054184A (ja) * | 2019-09-27 | 2021-04-08 | 本田技研工業株式会社 | 鞍乗型車両及び車速推定装置 |
| JP7041106B2 (ja) | 2019-09-27 | 2022-03-23 | 本田技研工業株式会社 | 鞍乗型車両及び車速推定装置 |
| DE102020211497B4 (de) | 2019-09-27 | 2023-07-27 | Honda Motor Co., Ltd. | Grätschsitzfahrzeug und fahrzeuggeschwindigkeits-schätzvorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5749124B2 (ja) | 2015-07-15 |
| WO2013031342A1 (ja) | 2013-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9903308B2 (en) | Method for detecting and correcting vehicle reference speed and vehicle system | |
| JP2011088585A (ja) | 2輪車用ブレーキ制御装置 | |
| JP5749124B2 (ja) | 二輪車用車両制御装置及びその方法 | |
| KR102575441B1 (ko) | 차량의 회생제동 제어 방법 | |
| JPWO2019073513A1 (ja) | 車両の制御方法及び車両の制御装置 | |
| JP6223663B2 (ja) | 自動二輪車用のブレーキ制御装置 | |
| JPH06286596A (ja) | アンチロック型液圧ブレーキ装置 | |
| CN114585544B (zh) | 车辆防抱死制动系统控制装置 | |
| KR101211099B1 (ko) | 차량의 이종타이어 감지 방법 | |
| JPH10329693A (ja) | アンチスキッドブレーキ制御装置 | |
| JPH1035464A (ja) | アンチスキッド制御装置 | |
| CN115703457A (zh) | 车轮半径修正方法、装置、设备及存储介质 | |
| KR102623778B1 (ko) | 차량 제어 장치 및 차량 제어 방법 | |
| JP5134046B2 (ja) | 車両挙動制御装置 | |
| CN114655009A (zh) | 一种两轮摩托车牵引力控制系统 | |
| KR20110064834A (ko) | 차량고착상황 탈출을 위한 차량 제어 방법 및 제어 장치 | |
| JP3445458B2 (ja) | 二輪車用アンチスキッド制御方法 | |
| CN110588608B (zh) | 用于制动控制的方法和装置 | |
| JP3255459B2 (ja) | 車両のアンチスキッドブレーキ装置 | |
| FR2923195A1 (fr) | Procede et dispositif de regulation pour le freinage d'un vehicule avec fonstion antiblocage des roues | |
| KR100326699B1 (ko) | 에이비에스제어시노면판정방법 | |
| JP5040562B2 (ja) | アンチスキッド制御装置 | |
| JP4675176B2 (ja) | 車両挙動制御装置 | |
| JP4241236B2 (ja) | 車両挙動制御装置 | |
| JP3199484B2 (ja) | アンチロックブレーキ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131021 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20131227 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20131227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150508 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150513 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5749124 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |