JP2012125145A - 磁気アクチュエータおよびそれを用いたマイクロミラーおよびミラーシステム - Google Patents
磁気アクチュエータおよびそれを用いたマイクロミラーおよびミラーシステム Download PDFInfo
- Publication number
- JP2012125145A JP2012125145A JP2011269187A JP2011269187A JP2012125145A JP 2012125145 A JP2012125145 A JP 2012125145A JP 2011269187 A JP2011269187 A JP 2011269187A JP 2011269187 A JP2011269187 A JP 2011269187A JP 2012125145 A JP2012125145 A JP 2012125145A
- Authority
- JP
- Japan
- Prior art keywords
- plate
- magnet
- magnetic
- mirror
- magnet yoke
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000004020 conductor Substances 0.000 claims abstract description 38
- 230000004907 flux Effects 0.000 claims abstract description 35
- 230000005415 magnetization Effects 0.000 claims abstract description 12
- 239000000463 material Substances 0.000 claims description 9
- 239000000725 suspension Substances 0.000 claims description 5
- WYTGDNHDOZPMIW-RCBQFDQVSA-N alstonine Natural products C1=CC2=C3C=CC=CC3=NC2=C2N1C[C@H]1[C@H](C)OC=C(C(=O)OC)[C@H]1C2 WYTGDNHDOZPMIW-RCBQFDQVSA-N 0.000 claims description 2
- 238000005452 bending Methods 0.000 claims description 2
- 230000000750 progressive effect Effects 0.000 claims description 2
- 125000006850 spacer group Chemical group 0.000 claims description 2
- 230000001678 irradiating effect Effects 0.000 claims 1
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000009434 installation Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 241001295925 Gegenes Species 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 238000005260 corrosion Methods 0.000 description 2
- 230000007797 corrosion Effects 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/085—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by electromagnetic means
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/18—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with coil systems moving upon intermittent or reversed energisation thereof by interaction with a fixed field system, e.g. permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/035—DC motors; Unipolar motors
- H02K41/0352—Unipolar motors
- H02K41/0354—Lorentz force motors, e.g. voice coil motors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/105—Scanning systems with one or more pivoting mirrors or galvano-mirrors
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Micromachines (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Abstract
【解決手段】磁気アクチュエータは少なくとも1つの第1回転軸4回りに回転可能に支承されたプレート3と該プレート3の下に配置されたマグネットヨークとを備える。プレート3は主延在面を有しており、回転軸4は主延在面に平行であり、プレート3は主延在面に平行に少なくとも1つの導体ループ10a,10bを有する。マグネットヨークは磁束をガイドするU字形レールと、U字形開口部に対して垂直な磁化方向を有する硬磁石とを有する。マグネットヨークの開口部がプレートの主延在面の方を向くように互いに向き付けられており、U字形レールは第1回転軸と平行な主延在方向を有しており、プレートは少なくとも1つの導体ループへの通電により少なくとも1つの回転軸回りに振れるようにする。
【選択図】図3
Description
IWindung = 2 * (4e-3m + 2e-3m) 12e-3m
w*t = 50e-6 * 4e-6 2e-10m2
R =2nrl/wt = 2 * 5 * 1.7e-8Wm * 12e-3m/2e-10m2 10 W
F = n l B l = 5 * 5e-2A * 5e-1T * 4e-3m +0.5 mN
Fgegen = n l B l = 5 * 5e-2A * 0.5e-1T * 4e-3m -0.05 mN
M = + 0.5 mN * 3.5e-3m 1.75 μNm
Mgegen = - 0.05 mN * 0.5e-3m -0.025 μNm
Wmax/mittel = 5e-2 A2 * 10W 25 / 8mW
Claims (9)
- 少なくとも1つの第1回転軸(4)回りに回転可能に支承されたプレート(3)と該プレート(3)の下に配置されたマグネットヨークとを備えた磁気アクチュエータにおいて、
前記プレート(3)は主延在面を有しており、
前記回転軸(4)は前記主延在面に平行であり、
前記プレート(3)は前記主延在面に平行に少なくとも1つの導体ループ(10,10a,10b)を有しており、
前記マグネットヨークは、磁束をガイドするU字形レール(1)と、U字形開口部に対して垂直な磁化方向を有する硬磁石(2)とを有しており、
前記マグネットヨークと前記プレート(3)は、前記マグネットヨークの開口部が前記プレート(3)の主延在面の方を向くように、互いに向き付けられており、
磁束をガイドする前記U字形レール(1)は、前記第1回転軸(4)と平行な主延在方向を有しており、
前記プレート(3)は前記少なくとも1つの導体ループ(10,10a,10b)への通電により前記少なくとも1つの回転軸(4)回りに振れる、ことを特徴とする磁気アクチュエータ。 - 前記プレート(3)は前記主延在面に平行に2つの導体ループ(10a,10b)を有しており、前記プレート(3)は前記主延在面内に前記回転軸(4)によって分けられた2つの平面領域を有しており、一方の導体ループ(10a)は一方の平面領域に、他方の導体ループ(10b)は他方の平面領域に配置されている、請求項1記載の磁気アクチュエータ。
- 前記2つの導体ループを互いに逆方向に通電することにより、前記回転可能に支承されたプレート(3)に前記第1回転軸(4)回りのトルクを発生させることができる、請求項2記載の磁気アクチュエータ。
- 前記マグネットヨークは硬磁石(2)を有しており、該硬磁石(2)の開放側に全面を覆うまたは構造化された磁束ガイド層(23)が配置されている、請求項1から3のいずれか1項記載の磁気アクチュエータ。
- 前記マグネットヨークの開口部と向かい合うようにシールド(230)がスペーサ(27)によって固定的に配置されており、これにより前記マグネットヨークの開放側への漂遊磁場が低減されている、請求項1から4のいずれか1項記載の磁気アクチュエータ。
- 前記プレート(3)はトーションばね、蛇行ばね、曲げばね、またはプログレッシブスプリングによって前記少なくとも1つの回転軸(4)回りに回転可能に支承されている、請求項1から5のいずれか1項記載の磁気アクチュエータ。
- 前記プレート(3)は、前記プレート(3)を少なくとも1つの方向に傾けさせる中央ばね懸架(40)を介して固定されている、請求項1から6のいずれか1項記載の磁気アクチュエータ。
- 請求項1から7のいずれか1項記載の磁気アクチュエータを備えたマイクロミラーにおいて、前記回転可能に支承されたプレート(3)は前記主延在面内に反射表面を有しているか、または、少なくとも前記マグネットヨークの開口部とは逆側の前記プレート(3)の面にミラーエレメントが設けられているか、もしくは反射性材料が敷かれている、ことを特徴とするマイクロミラー。
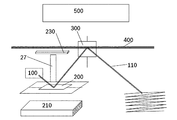
- 請求項8記載の少なくとも1つの第1マイクロミラーと第2ミラーとを備えた2ミラーシステムにおいて、当該システムは2Dスキャナであり、前記第2ミラーは前記第1マイクロミラーの第1回転軸(4)に対して垂直な回転軸を有しており、前記第2ミラーは、当該ミラーを照射するレーザビームが2つの方向に偏向されるように、前記第1マイクロミラーと向かい合って配置されている、ことを特徴とする2ミラーシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102010062591A DE102010062591A1 (de) | 2010-12-08 | 2010-12-08 | Magnetischer Aktor |
| DE102010062591.4 | 2010-12-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012125145A true JP2012125145A (ja) | 2012-06-28 |
| JP6053277B2 JP6053277B2 (ja) | 2016-12-27 |
Family
ID=45955515
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011269187A Active JP6053277B2 (ja) | 2010-12-08 | 2011-12-08 | 磁気アクチュエータおよびそれを用いたマイクロミラーおよびミラーシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10690906B2 (ja) |
| JP (1) | JP6053277B2 (ja) |
| CN (1) | CN102570766B (ja) |
| DE (1) | DE102010062591A1 (ja) |
| IT (1) | ITMI20112171A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016512654A (ja) * | 2013-03-12 | 2016-04-28 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | バイオセンサ用u字形磁石 |
| JPWO2015092907A1 (ja) * | 2013-12-19 | 2017-03-16 | パイオニア株式会社 | 駆動装置 |
| JP2018128700A (ja) * | 2018-05-09 | 2018-08-16 | パイオニア株式会社 | 駆動装置 |
| JP2020092594A (ja) * | 2020-01-17 | 2020-06-11 | パイオニア株式会社 | 駆動装置 |
| JP2022033852A (ja) * | 2020-01-17 | 2022-03-02 | パイオニア株式会社 | 駆動装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010064218A1 (de) | 2010-12-27 | 2012-06-28 | Robert Bosch Gmbh | Magnetisch antreibbarer Mikrospiegel |
| DE102011089514B4 (de) | 2011-12-22 | 2022-09-01 | Robert Bosch Gmbh | Mikrospiegel und 2-Spiegelsystem |
| WO2014063737A1 (en) | 2012-10-25 | 2014-05-01 | Lemoptix Sa | A mems device |
| DE102014211546B4 (de) * | 2014-06-17 | 2022-08-25 | Robert Bosch Gmbh | Mikrospiegelanordnung |
| RU2639609C2 (ru) * | 2016-04-05 | 2017-12-21 | Михаил Викторович Яковлев | Способ управления лазерным лучом |
| DE112017002356A5 (de) * | 2016-05-07 | 2019-01-24 | Otto-Von-Guericke-Universität Magdeburg | Operatives Assistenzsystem für einen Magnetresonanztomographen |
| CN111327536A (zh) * | 2020-03-23 | 2020-06-23 | 杭州半联贸易有限公司 | 一种互联网用保证路由器信号的稳定设备 |
| DE102021204467A1 (de) | 2021-05-04 | 2022-11-10 | Robert Bosch Gesellschaft mit beschränkter Haftung | Mikromechanisches Schwingungssystem |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005266713A (ja) * | 2004-03-22 | 2005-09-29 | Hitachi Cable Ltd | 光スイッチ |
| JP2007304624A (ja) * | 2007-07-27 | 2007-11-22 | Ricoh Co Ltd | ポリゴンミラーの加工方法、ポリゴンスキャナ及び光走査装置 |
| JP2008076569A (ja) * | 2006-09-19 | 2008-04-03 | Seiko Epson Corp | アクチュエータ、光スキャナ、および画像形成装置 |
| JP2009089501A (ja) * | 2007-09-28 | 2009-04-23 | Nippon Signal Co Ltd:The | プレーナ型電磁アクチュエータ |
| JP2009109778A (ja) * | 2007-10-31 | 2009-05-21 | Hitachi Metals Ltd | ミラーデバイス |
| JP2009265479A (ja) * | 2008-04-28 | 2009-11-12 | Victor Co Of Japan Ltd | 光偏向器及びその駆動方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100343219B1 (ko) * | 1995-02-25 | 2002-11-23 | 삼성전기주식회사 | 거울구동장치 |
| JP2987750B2 (ja) | 1995-05-26 | 1999-12-06 | 日本信号株式会社 | プレーナ型電磁アクチュエータ |
| US6188504B1 (en) * | 1996-06-28 | 2001-02-13 | Olympus Optical Co., Ltd. | Optical scanner |
| AU2001286745A1 (en) * | 2000-08-27 | 2002-03-13 | Corning Intellisense Corporation | Magnetically actuated micro-electro-mechanical apparatus and method of manufacture |
| US6388789B1 (en) | 2000-09-19 | 2002-05-14 | The Charles Stark Draper Laboratory, Inc. | Multi-axis magnetically actuated device |
| US7071594B1 (en) * | 2002-11-04 | 2006-07-04 | Microvision, Inc. | MEMS scanner with dual magnetic and capacitive drive |
| CN1823290A (zh) | 2003-07-14 | 2006-08-23 | 皇家飞利浦电子股份有限公司 | 激光束扫描器 |
| JP4729289B2 (ja) * | 2003-12-04 | 2011-07-20 | オリンパス株式会社 | 光偏向器 |
| JP2005173436A (ja) | 2003-12-15 | 2005-06-30 | Canon Inc | 光偏向器 |
| US7485485B2 (en) | 2004-02-09 | 2009-02-03 | Microvision, Inc. | Method and apparatus for making a MEMS scanner |
| CN100528735C (zh) | 2004-03-08 | 2009-08-19 | 松下电器产业株式会社 | 微致动器以及具有微致动器的装置 |
| CN101031839A (zh) | 2004-09-28 | 2007-09-05 | 皇家飞利浦电子股份有限公司 | 二维微扫描器 |
| US7471439B2 (en) | 2005-11-23 | 2008-12-30 | Miradia, Inc. | Process of forming a micromechanical system containing an anti-stiction gas-phase lubricant |
| KR100738114B1 (ko) | 2006-05-18 | 2007-07-12 | 삼성전자주식회사 | 액츄에이터 및 이차원 스캐너 |
| JP4247254B2 (ja) * | 2006-08-08 | 2009-04-02 | マイクロプレシジョン株式会社 | 電磁駆動型光偏向素子 |
| DE102006038787A1 (de) | 2006-08-18 | 2008-02-21 | Oc Oerlikon Balzers Ag | Spiegelantrieb für Projektionssysteme |
| JP4928301B2 (ja) * | 2007-02-20 | 2012-05-09 | キヤノン株式会社 | 揺動体装置、その駆動方法、光偏向器、及び光偏向器を用いた画像表示装置 |
| DE102008042346A1 (de) | 2008-09-25 | 2010-04-01 | Robert Bosch Gmbh | Magnetjoch, mikromechanisches Bauteil und Herstellungsverfahren für ein Magnetjoch und ein mikromechanisches Bauteil |
| US20100141366A1 (en) | 2008-12-04 | 2010-06-10 | Microvision, Inc. | Magnetically Actuated System |
-
2010
- 2010-12-08 DE DE102010062591A patent/DE102010062591A1/de active Pending
-
2011
- 2011-11-29 IT IT002171A patent/ITMI20112171A1/it unknown
- 2011-11-30 US US13/307,749 patent/US10690906B2/en active Active
- 2011-12-07 CN CN201110404045.1A patent/CN102570766B/zh active Active
- 2011-12-08 JP JP2011269187A patent/JP6053277B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005266713A (ja) * | 2004-03-22 | 2005-09-29 | Hitachi Cable Ltd | 光スイッチ |
| JP2008076569A (ja) * | 2006-09-19 | 2008-04-03 | Seiko Epson Corp | アクチュエータ、光スキャナ、および画像形成装置 |
| JP2007304624A (ja) * | 2007-07-27 | 2007-11-22 | Ricoh Co Ltd | ポリゴンミラーの加工方法、ポリゴンスキャナ及び光走査装置 |
| JP2009089501A (ja) * | 2007-09-28 | 2009-04-23 | Nippon Signal Co Ltd:The | プレーナ型電磁アクチュエータ |
| JP2009109778A (ja) * | 2007-10-31 | 2009-05-21 | Hitachi Metals Ltd | ミラーデバイス |
| JP2009265479A (ja) * | 2008-04-28 | 2009-11-12 | Victor Co Of Japan Ltd | 光偏向器及びその駆動方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016512654A (ja) * | 2013-03-12 | 2016-04-28 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | バイオセンサ用u字形磁石 |
| JPWO2015092907A1 (ja) * | 2013-12-19 | 2017-03-16 | パイオニア株式会社 | 駆動装置 |
| JP2018128700A (ja) * | 2018-05-09 | 2018-08-16 | パイオニア株式会社 | 駆動装置 |
| JP2020092594A (ja) * | 2020-01-17 | 2020-06-11 | パイオニア株式会社 | 駆動装置 |
| JP2022033852A (ja) * | 2020-01-17 | 2022-03-02 | パイオニア株式会社 | 駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| ITMI20112171A1 (it) | 2012-06-09 |
| US10690906B2 (en) | 2020-06-23 |
| DE102010062591A1 (de) | 2012-06-14 |
| JP6053277B2 (ja) | 2016-12-27 |
| CN102570766A (zh) | 2012-07-11 |
| US20120147444A1 (en) | 2012-06-14 |
| CN102570766B (zh) | 2017-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6053277B2 (ja) | 磁気アクチュエータおよびそれを用いたマイクロミラーおよびミラーシステム | |
| US6897990B2 (en) | Rocking member apparatus | |
| JP5513834B2 (ja) | レンズ駆動装置 | |
| EP3006395B1 (en) | Drive device | |
| JP5720673B2 (ja) | 磁気力型駆動装置、光走査装置、及び画像表示装置 | |
| JP2009058930A (ja) | 揺動体装置、光偏向器、及びそれを用いた光学機器 | |
| JP4164421B2 (ja) | 揺動装置、揺動装置を用いた光偏向器、及び光偏向器を用いた画像表示装置、画像形成装置、並びにその製法 | |
| JP4968760B1 (ja) | アクチュエータ | |
| JP4144840B2 (ja) | 揺動体装置、光偏向器、及び光偏向器を用いた光学機器 | |
| KR20080096731A (ko) | 스캐닝 마이크로미러 | |
| JP2009109778A (ja) | ミラーデバイス | |
| JP2010107666A (ja) | 光スキャナ | |
| JP3848249B2 (ja) | 揺動体装置 | |
| JP2012189662A (ja) | 2次元光走査装置及び画像投影装置 | |
| JP2009042322A (ja) | 揺動体装置、光偏向器、及びそれを用いた光学機器 | |
| JP2005181395A (ja) | 光偏向器 | |
| JP2008505359A (ja) | 光学スキャナ | |
| JP2012063656A (ja) | 2次元光走査装置及びこれを用いた画像投影装置 | |
| JP2007171930A (ja) | 揺動体装置、光偏向器、及びその制御方法 | |
| JPH01195417A (ja) | 光ビーム偏向器 | |
| JP3775281B2 (ja) | 光ピックアップ | |
| JP2004198647A (ja) | プレーナー型電磁アクチュエータ | |
| JP2007256554A (ja) | Memsデバイス | |
| JP2005148339A (ja) | 光偏向器 | |
| JP2003029190A (ja) | 光偏向器、それを用いた画像表示装置及び画像形成装置、並びに光偏向器の作製方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151130 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160229 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161031 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6053277 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |