JP2012118655A - 遠隔監視システム - Google Patents
遠隔監視システム Download PDFInfo
- Publication number
- JP2012118655A JP2012118655A JP2010266116A JP2010266116A JP2012118655A JP 2012118655 A JP2012118655 A JP 2012118655A JP 2010266116 A JP2010266116 A JP 2010266116A JP 2010266116 A JP2010266116 A JP 2010266116A JP 2012118655 A JP2012118655 A JP 2012118655A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- frequency
- communication
- monitoring system
- slave
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Alarm Systems (AREA)
- Telephonic Communication Services (AREA)
Abstract
【課題】 通信トラフィックを減少させて全体のコリジョン及びパケット損失率を低減させるとともに、子機全体の台数の大幅な増加を可能にする。
【解決手段】 少なくとも所定時間Ts間隔毎に子機2…から定期通報Ds…を送信するとともに、この定期通報Ds…を中継機3…が受信したなら子機2…にACK信号Dx…を送信する機能を有する遠隔監視システムであって、中継機3…に、子機2…に対して通信を行う第一アドホック通信部7sと他の中継機3…及び親機4に対して通信を行う第二アドホック通信部7tとを設けるとともに、子機2…と中継機3…間の通信に使用する第一周波数Fsに対して、中継機3…同士間の通信に使用する周波数(第二周波数)Ft及び中継機3…と親機4間の通信に使用する第二周波数Ftを、少なくとも干渉が生じない異なる周波数に設定する。
【選択図】 図1
【解決手段】 少なくとも所定時間Ts間隔毎に子機2…から定期通報Ds…を送信するとともに、この定期通報Ds…を中継機3…が受信したなら子機2…にACK信号Dx…を送信する機能を有する遠隔監視システムであって、中継機3…に、子機2…に対して通信を行う第一アドホック通信部7sと他の中継機3…及び親機4に対して通信を行う第二アドホック通信部7tとを設けるとともに、子機2…と中継機3…間の通信に使用する第一周波数Fsに対して、中継機3…同士間の通信に使用する周波数(第二周波数)Ft及び中継機3…と親機4間の通信に使用する第二周波数Ftを、少なくとも干渉が生じない異なる周波数に設定する。
【選択図】 図1
Description
本発明は、アドホックネットワークシステムを利用することにより登下校中の児童を見守るための地域見守システム等に用いて好適な遠隔監視システムに関する。
近時、登下校中の児童が不審者により誘拐されるなどの事件が増加する傾向にあることから、児童の安全を如何に確保するかが重要な課題となっており、その有効な対策が要請されている。
従来、このような要請に対応したシステムとしては、特許文献1に開示される地域防犯システムが知られている。この地域防犯システムは、児童または園児を確認対象者として、固有のタグIDを記憶した無線タグを有する無線タグ付名札と、所定のエリアに複数配置される監視装置と、複数配置される監視装置とはネットワークを介して接続される管理装置とにより、無線タグ付名札を所持した確認対象者の所在を確認する地域防犯システムを構成するとともに、特に、無線タグ付名札の無線タグは、他の無線タグ付名札とアドホック通信するアドホック通信部と、電源部とをさらに有し、監視装置は、周囲に所定の強度の電波を発信し、それに応答して無線タグが送信するタグIDを受信する無線送受信部と、ネットワークを介して管理装置に受信したタグIDを所定のタイミングで通知するタグID通信部とを有し、管理装置は、ネットワークを介して所定の監視装置と通信してタグIDを取得するタグID取得部と、所定の記憶部に登録されている確認対象者のタグIDと受信したタグIDとを比較して確認対象者の所在を確認する確認部とを有し、無線タグ付名札の無線タグは、監視装置の無線送受信部と通信を行うときに、アドホック通信によって1以上の他の無線タグを介して通信するように構成されている。
ところで、このようなアドホックネットワークシステムを利用した従来の地域防犯システムでは、通常、子機の発呼時に、キャリアセンスを実行し、他のキャリアの有無を確認している。そして、他のキャリアが無いときに、乱数により発生するランダム待時間を経て送信を実行し、待機している複数の子機同士間のコリジョンの発生を回避している。この場合、子機同士が隠れ関係にあれば、互いのキャリアが見えないため、コリジョンの発生を許してしまうが、子機同士が晒し関係にあれば、本来、コリジョンは発生しないか或いは発生しても無視できる僅かな回数となる。
しかし、子機台数が増加する状況、具体的には、子機が集まって来る学校や幼稚園等の近くに設置される親機の付近では、子機同士が晒し関係にあっても子機と中継機間のコリジョンが増加する傾向が認められ、このコリジョンの増加は、パケットの破棄数(パケット損失率)の増加、更にはシステムの安定性及び信頼性の低下を招く。したがって、既設の地域防犯システムでは、子機台数を増やすことに限界があり、柔軟性かつ発展性のあるシステム運用ができない問題があった。
そこで、この問題を解決するため、本出願人は、既に、特許文献2により、無線IDタグを設けた無線通信部を有し、かつ複数の防犯対象者がそれぞれ携帯可能な複数の子機と、無線IDタグを設けたアドホック通信部を有し、かつ所定の地域内における複数の異なる所定場所にそれぞれ設置した複数の中継機と、アドホック通信部を有する少なくとも一台の親機と、親機に接続したサーバコンピュータを備えるとともに、特に、子機の発呼時に、キャリアセンスの実行により他のキャリアを検出しないときは、予め子機の全台数に基づいて時間長を設定した所定のガードタイムが経過し、この後、乱数により発生するランダム待時間が経過したことを条件にパケットの送信処理を行う送信方法を用いた地域防犯システムを提案した。
しかし、上述した特許文献2で開示される送信方法を用いた地域防犯システム(遠隔監視システム)は、次のような改善すべき点も存在した。
第一に、想定される子機の全台数に基づいて時間長を設定したガードタイムを設けるため、ガードタイムを設けない場合に比較すれば、子機台数を増やすことができ、相応の効果を得ることができるが、増やすことができる子機台数には限界がある。結局、子機台数が限界を越えて増えた場合には、コリジョンの増加、更にはパケットの破棄数の増加を許してしまうため、子機台数が想定を超えるような大幅な増加に対しては対応できない。
第二に、使用時における様々なシーン、即ち、子機台数が非常に多い場合と少ない場合のいずれに対しても台数に関係なく固定のガードタイムが設定されるため、子機台数が多い場合(増加した場合)におけるコリジョンの発生を回避する観点からは好ましいパフォーマンスを得ることができるが、子機台数が少ない場合には、ガードタイムによる遅延時間が発生してしまうなど、子機台数に対応した最適化を図る観点からは更なる改善の余地もあった。
本発明は、このような背景技術に存在する課題を解決した遠隔監視システムの提供を目的とするものである。
本発明に係る遠隔監視システム1は、上述した課題を解決するため、無線IDタグを設けた無線通信部2t…を有する複数の子機2…と、無線IDタグを設けたアドホック通信部3t…を有し、かつ所定の監視エリアA内における複数の異なる場所にそれぞれ設置した複数の中継機3…と、アドホック通信部4tを有する少なくとも一台の親機4と、親機4に接続したサーバコンピュータ6とを備え、少なくとも所定時間Ts間隔毎に子機2…から定期通報Ds…を送信するとともに、この定期通報Ds…を中継機3…が受信したなら子機2…にACK信号Dx…を送信する機能を有する遠隔監視システムであって、中継器3…に、子機2…に対して通信を行う第一アドホック通信部7sと他の中継器3…及び親機4に対して通信を行う第二アドホック通信部7tとを設けるとともに、子機2…と中継器3…間の通信に使用する周波数(第一周波数)Fsに対して、中継器3…同士間の通信に使用する周波数(第二周波数)Ft及び中継器3…と親機4間の通信に使用する周波数(第二周波数)Ftを、少なくとも干渉が生じない異なる周波数に設定することを特徴とする。
この場合、発明の好適な態様により、第一周波数Fsは、第二周波数Ftよりも低い周波数に設定することができる。また、中継器3…同士間における通信速度Bt及び中継器3…と親機4間における通信速度Btは、子機2…と中継器3…間における通信速度Bsよりも速い通信速度に設定することができる。他方、遠隔監視システム1は、地域見守システム1a,災害監視システム1b,農場監視システム1c等に利用することができる。地域見守システム1aに利用する場合には、所定の監視エリアAとして、児童等の被見守者Hが移動する通学エリアAaを適用するとともに、子機2…を、被見守者H…が携帯可能に構成することができる。災害監視システム1bに利用する場合には、所定の監視エリアAとして、災害が発生する虞れのある予め選定した災害監視エリアAbを適用するとともに、子機2…を、災害監視エリアAbにおける所定の被監視場所Xb…に設置し、かつ子機2…に、被監視場所Xb…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続することができる。農場監視システム1cに利用する場合には、所定の監視エリアAとして、予め選定した領域の農場Acを適用するとともに、子機2…を、農場Acにおける所定の被監視場所Xc…に設置し、かつ子機2…に、被監視場所Xc…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続することができる。
このような構成を有する本発明に係る遠隔監視システム1によれば、次のような顕著な効果を奏する。
(1) 子機2…と中継器3…間の通信に使用する周波数(第一周波数)Fsに対して、中継器3…同士間の通信に使用する周波数(第二周波数)Ft及び中継器3…と親機4間の通信に使用する周波数(第二周波数)Ftを、少なくとも干渉が生じない異なる周波数に設定するため、各周波数Fs,Ft単位の通信トラフィックが減少し、全体のコリジョン及びパケット損失率を大きく低減させることができ、もって、子機2…全体の台数を大幅に増加させることができる。
(2) 従来にようなコリジョン及びパケット損失率を低減させるためのガードタイムの設定が不要又は時間短縮が可能になるため、通信時における遅延時間の回避及び通信時間の短縮を図ることができるとともに、ガードタイムに基づく制御処理の煩雑化を回避することができる。
(3) 好適な態様により、第一周波数Fsを、第二周波数Ftよりも低い周波数に設定すれば、特に、児童等の被見守者Hが移動する通学エリアAaを監視する地域見守システム1aに利用して最適となる。即ち、子機2…を携帯する児童等の被見守者Hが、比較的見通しの悪い街中等を移動する場合であっても、周波数の比較的低い第一周波数Fsを用いるため、電波の回折性及び透過性が良好となり、子機2…との通信を確実かつ安定に行うことができ、信頼性の高いシステムを構築できる。
(4) 好適な態様により、中継器3…同士間における通信速度Bt及び中継器3…と親機4間における通信速度Btを、子機2…と中継器3…間における通信速度Bsよりも速い通信速度に設定すれば、中継器3…は、比較的見晴らしの良い場所を選定し、かつ高い位置に固定して設置するため、中継器3…同士間、又は中継器3と親機4間における通信速度の高速化が可能となり、通信時間の更なる短縮を図ることができる。
(5) 好適な態様により、所定の監視エリアAとして、児童等の被見守者Hが移動する通学エリアAaを適用するとともに、子機2…を、被見守者H…が携帯可能に構成すれば、遠隔監視システム1を地域見守システム1aとして利用できるため、児童等の被見守者Hに対する防犯性を高めることができることに加え、特に、多くの児童等(子機2…)が任意の場所に集中したような場合であっても、コリジョンの発生を回避し、システムにおける確実な通信を確保できる。
(6) 好適な態様により、所定の監視エリアAとして、災害が発生する虞れのある予め選定した災害監視エリアAbを適用するとともに、子機2…を、災害監視エリアAbにおける所定の被監視場所Xb…に設置し、かつ子機2…に、被監視場所Xb…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続すれば、遠隔監視システム1を災害監視システム1bとして利用できるため、少なくとも地面Gの状態変化等を事前に感知して自然災害等を未然に防止できることに加え、特に、複数の子機2…を任意の一部エリアに対して重点的に追加設置するような場合であっても、コリジョンの発生を回避し、システムにおける確実な通信を確保できる。
(7) 好適な態様により、所定の監視エリアAとして、予め選定した領域の農場Acを適用するとともに、子機2…を、農場Acにおける所定の被監視場所Xc…に設置し、かつ子機2…に、被監視場所Xc…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続すれば、遠隔監視システム1を農場監視システム1cとして利用できるため、少なくとも農地状態等に係わる各種データを迅速かつ容易に収集できることに加え、特に、複数の子機2…を一部領域に対して重点的に追加設置し、より緻密なデータ収集を行うような場合であっても、コリジョンの発生を回避し、システムにおける確実な通信を確保できる。
次に、本発明に係る好適実施形態を挙げ、図面に基づき詳細に説明する。
まず、遠隔監視システム1を利用した本実施形態に係る地域見守システム1aにおける全体のシステム構成について、図1〜図5を参照して説明する。
図2は、地域見守システム1aの全体系統を示す。Aaは通学エリアであり、地域見守システム1aにより監視する監視エリアAとなる。なお、H…は通学路Rに沿って通学する児童(被見守者)を、C…は児童H…が背負っているランドセルをそれぞれ示す。ランドセルCは図4(a)に拡大して示す。
図4(a)に示すように、ランドセルCの側面Csには、防水性を有する子機(端末)2を装着する。子機2は、図4(b)に示すように、矩形型に形成した偏平なハウジング12を有し、このハウジング12の表面パネルには、非常ボタン13,機能ボタン14…,ランプ9a及びスピーカ9bを有する。さらに、ハウジング12の内部には、図5(a)に示す電気系回路15を収容する。子機2の電気系回路15は、CPUを含む子機処理部16,メモリ17及び処理プログラム(プログラムメモリ)Psを含むマイクロコンピュータ機能部を備えるとともに、バッテリ19を内蔵する。また、子機処理部16には、上述した非常ボタン13,機能ボタン14…,ランプ9a及びスピーカ9bを接続するとともに、無線IDタグを設けた無線通信部2tを接続する。
無線通信部2tの無線仕様は、電力線からの自立を最優先とし、到達距離が長く、回折性及び透過性による接続能力が高い特定小電力無線(出力10〔mW〕)を使用する。特に、周波数は、第一周波数Fsとなる429〔MHz〕帯を使用する。通信速度Bsは、1.2k〔bps〕となる。また、変調方式は、2値FSK,符号方式はマンチェスター符号を用いる。したがって、子機2…と中継器3…間の通信は、第一周波数Fsである429〔MHz〕帯を使用して行われる。この第一周波数Fsは、後述する中継器3…同士間の通信に使用する第二周波数Ft(950MHz帯)及び中継器3…と親機4間の通信に使用する第二周波数Ft(950MHz帯)よりも低い周波数に設定する。このように、第一周波数Fsを第二周波数Ftよりも低い周波数に設定すれば、子機2…を携帯する児童等の被見守者Hが、比較的見通しの悪い街中等を移動する場合であっても、電波の回折性及び透過性が良好となり、子機2…との通信を確実かつ安定に行うことができ、信頼性の高いシステムを構築できる利点がある。
また、21は、子機2に設けた振動センサであり、被見守者Hの移動を検出する。即ち、振動センサ21は、被見守者Hが移動する際に発生する振動を検出することにより、被見守者Hが移動したものと判断できるとともに、振動を検出しないときは、被見守者Hが移動していないものと判断できる。
一方、通学エリアAa内における複数の異なる所定場所、即ち、通学路Rの途中における異なる複数の場所には、それぞれ中継機3…を設置する。中継機3…は通学路Rに面した地上高4〜5〔m〕の位置を選定する。図4(c)は、カーブミラー30のポール30pの上部に固定金具31c…を介して支持ステー31sの下部を固定し、この支持ステー31sの上端部に中継機3を取付けた場合を示す。図4(c)は、カーブミラー30を利用して設置した場合を示すが、その他、電柱や街灯等の各種公共物等を利用して設置することができる。中継機3は、防水性を有する中継機ボックス32を備え、この中継機ボックス32における天面上に太陽電池33を配設するとともに、底面下に送受信用アンテナ34を配設する。また、中継機ボックス32の内部には、図5(b)に電気系回路35を収容する。中継機3の電気系回路35は、CPUを含む中継機処理部36,メモリ37及び処理プログラム(プログラムメモリ)Psrを含むマイクロコンピュータ機能部を備えるとともに、中継機処理部36に接続したバッテリ39を備える。バッテリ39と太陽電池33は半導体スイッチ40に接続する。この場合、中継機3の電源部は、太陽電池33,バッテリ39,半導体スイッチ40及び中継機処理部36の機能を利用した充放電回路により構成される。これにより、この充放電回路では、バッテリ39の電圧を監視し、一定の電圧を越えた場合には充電を停止するとともに、電圧が最低動作電圧を下回ったときは、中継機処理部36がスタンバイモードに移行することにより、バッテリ39の過放電を防止する。
さらに、中継機処理部36には、無線IDタグを設けたアドホック通信部7を接続する。アドホック通信部7は、子機2…に対して通信を行う第一アドホック通信部7sと、他の中継器3…及び親機4に対して通信を行う第二アドホック通信部7tとを備える。この場合、第一アドホック通信部7sは、子機2…に対する通信を行うため、前述した子機2…の無線通信部2tと基本的には同じ機能を有しており、周波数は、第一周波数Fsとなる429〔MHz〕帯を使用する。他方、第二アドホック通信部7tは、他の中継器3…間及び親機4との通信に用いる。第二アドホック通信部7tも基本的な構成は、第一アドホック通信部7sと同じであるが、周波数は、第二周波数Ftとなる950〔MHz〕帯を使用する。したがって、第二アドホック通信部7tの無線仕様は、周波数が第二周波数Ftとなる950〔MHz〕帯となる特定小電力無線(出力10〔mW〕)を使用し、通信速度Btは66.6k〔bps〕となる。この場合、第二周波数Ftは、前述した第一周波数Fsに対して、少なくとも干渉が生じない異なる周波数であって、第一周波数Fsよりも高い周波数に設定する。これにより、中継器3…同士間及び中継器3…と親機4間の通信速度Bt(66.6k〔bps〕)は、子機2…と中継器3…間の通信速度Bs(1.2k〔bps〕)よりも数十倍もの速い通信速度となる。中継器3…は、比較的見晴らしの良い場所を選定し、かつ高い位置に固定して設置するため、中継器3…同士間、又は中継器3と親機4間においては、子機2…間との通信に要求される回折性及び透過性は要求されない。これにより、通信速度Btの高速化が可能となり、通信時間の更なる短縮を図れる利点がある。
ところで、950〔MHz〕帯となる特定小電力無線は、国内において、2008年度より新たに使用が認められた周波数帯である。一方、例示のような地域見守システム1aでは、最も近い中継器3…間及び中継器3…と親機4間の直線距離は、0.5〜2〔km〕程度となる。そこで、周波数を950〔MHz〕帯、送信出力を10〔mW〕、通信速度を66.6k〔bps〕に設定し、1〔km〕程度の長距離においても通信が可能であるか否かの通信実験を行った。通信実験は、障害物の無い屋外において、送信端末を地上から高さ5〔m〕、受信端末を高さ1.7〔m〕の位置に置き、受信端末を送信端末から遠ざけながら、50〔m〕毎にRSSIの測定を10〔回〕行い、その平均値を求めた。測定したRSSIは、電波を1〔ms〕受信した内での最大値である。なお、RSSIは、端末内の無線チップが出力する受信信号強度である。図2に通信実験の結果を示す。端末の固体差も多少あるが、RSSI=50前後の時に、受信電力は、−100〔dBm〕程度であった。また、1〔km〕の地点において、パケットの送受信が可能であることも確認できた。
他方、中継機ボックス32の外面パネルには、GPS(グローバル・ポジショニング・システム)受信機8sを取付ける。このGPS受信機8sは中継機処理部36に接続して同期用データDwを生成する同期生成部8を構成する。GPS受信機8sのNMEA出力には、位置情報(緯度情報及び経度情報)と時刻情報が含まれるため、この時刻情報から得る時刻データ、即ち、1〔pps〕(1秒間隔のクロック)の時刻データを用いて同期用データDwを生成する。このように、中継機3に備えるGPS受信機8sから得る時刻情報を用いて同期用データDwを生成する同期生成部8を設ければ、正確な時刻情報の確保により各中継機3…及び各子機2…を正確に同期させることができ、中継機3から子機2に対する送信を確実に行うことができる。
さらに、児童Hが通学する小学校には、アドホック通信部4tを有する一台の親機4を設置する。この親機4は、中継機3から第一アドホック通信部7sを除くとともに、電源部を、例えば、AC100〔V〕の商用電源に接続可能な直流電源装置に変更したものを利用できる。また、親機4は、ゲートウェイ51を介してインターネット(ネットワーク)5に接続する。一方、監視センターには、サーバコンピュータ6を設置し、このサーバコンピュータ6をインターネット5に接続する。これにより、サーバコンピュータ6と親機4はインターネット5を介してデータ送受信を行うことができる。さらに、保護者の所持するパーソナルコンピュータ(パソコン)52或いは携帯電話53とサーバコンピュータ6を、インターネット5を介して双方向通信可能に構成する。
なお、子機2…,中継器3…及び親機4の無線仕様に用いる特定小電力無線は、他の無線に比べて速いとは言えないため、ネットワークに使用するアプリケーションは文字情報が中心となる。また、コリジョンを回避するため、CSMA/CA with Ack方式を採用するとともに、無線通信システムに適したルーティングプロトコルとして、中継機3…が定期的に各中継機3…の経路情報を受信し、自局の中継経路を構築するプロアクティブ方式を用いたアドホックネットワークシステムを用いる。CSMA/CA with Ack方式とは、通信路が一定時間以上継続して空いていることを確認してから各無線端末がデータを送信する方式であり、実際にデータが正しく送信されたことは、受信側からのACK信号の到着をもって判定する。プロアクティブ方式とは、各無線端末間が、通信に先立って無線ネットワークの状況を確認し、中継経路を構築しておく方式である。アドホックネットワークシステムとは、基地局などの固定局を必要とせず、半固定の無線端末間でデータをホッピングすることにより、柔軟に宛先局へデータ伝送を行う自立分散型ネットワークである。
次に、このようなシステム構成を有する地域見守システム1の基本的な動作について、図1〜図7を参照して説明する。
今、任意の児童(被見守者)Hが子機2を携帯し、小学校に登校する場合を想定する。この際、子機2は、定期的に自局の情報をパケットにより送信する。送信時の周波数は、第一周波数Fs(429〔MHz〕帯)である。この場合、子機2には、二つの定期通報モードが設定されており、移動中は、通常の間隔Tsとなる3〔分〕毎に発信する第一定期通報モードを実行し、移動していないときは、通常時の間隔Tsよりも長い間隔Tmとなる1〔時間〕毎に発信する第二定期通報モードを実行する。図6は、各モードの使用態様(実行態様)を示す。子機2の動作中は、子機処理部16により振動センサ21の出力を監視する(ステップS1)。児童Hの移動中は、振動センサ21により歩行時の振動を感知して検出信号を出力する。これにより、子機処理部16は移動中と判断して、3〔分〕毎に定期通報(パケット)を送信する第一定期通報モードを実行する(ステップS2,S3)。一方、児童Hが休息等により移動していないときは、振動センサ21は振動を検出しないため、検出信号を出力しない。これにより、子機処理部16は移動していないと判断して、1〔時間〕毎に定期通報(パケット)を送信する第二定期通報モードを実行し、通信トラフィックの低減及び電力消費の低減を図っている(ステップS2,S4)。以上のモード選択処理は、バッテリ切れ等により子機2が非動作状態となる場合を除いて常時行われる(ステップS5)。
このように、子機2に、被見守者Hの移動の有無を検出する振動センサ21を設け、当該移動の検出時に、通常時の間隔Tsで定期通報Dsを送信する第一定期通報モードを実行するとともに、移動の非検出時に、通常時の間隔Tsよりも長い間隔Tmで定期通報Dsを送信する第二定期通報モードを実行するようにすれば、長い間隔Tmで定期通報Dsを送信するいわば省電力モードの実行中であっても、緊急情報等を、サーバコンピュータ6(中継機3)側から子機2に対して、迅速かつ確実に送信することができる。
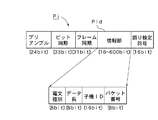
図7に、子機2が送信するパケットPiのデータフォーマットを示す。このデータフォーマットにおける情報部Pidには、定期通報又は緊急通報の種別,子機2の固有ID等が含まれており、通常時は、定期通報が行われる。定期通報を各中継機3…が受信すれば、受信した各中継機3…は、その受信電界強度データを情報部Pidに付加したパケットを順次親機4まで中継(転送)する。この場合、各中継機3…の中継経路は予め設定されているとともに、中継器3…同士間及び中継器3…と親機4間は、第二アドホック通信部7t…を用いて通信が行われ、通信時の周波数は、第二周波数Ft(950〔MHz〕帯)である。図1に、第一周波数Fs(429〔MHz〕帯)を用いた子機2…と中継器3…間,第二周波数Ft(950〔MHz〕帯)を用いた中継器3…同士間及び中継器3…と親機4間における通信イメージを示す。
一方、親機4が定期通報を受信すれば、受信した定期情報をゲートウェイ51及びインターネット5を介してサーバコンピュータ6に送信する。サーバコンピュータ6は、定期通報を受信した各中継機3…の子機2に対する受信電界強度に基づいて、最も強い電波を受信した中継機3の位置を子機2の位置としてデータベースに登録(又は更新)する。この場合、子機2の位置は、複数の中継機3…の受信電界強度の大きさの違いから割り出した推定位置であってもよい。一方、サーバコンピュータ6は、子機2の定期通報に基づいて子機2の位置を定期的に把握し、サーバコンピュータ6に予め設定した子機2の指定エリア内であるか否かを監視する。この際、指定エリア外に移動したときは、サーバコンピュータ6から保護者(パソコン52,携帯電話53)及び関係者にEメールにより通知する。他方、非常ボタン13が押された緊急通報の場合には、その受信電界強度データを付加したパケットを優先して親機4まで中継するとともに、サーバコンピュータ6に送信し、サーバコンピュータ6から直ちに保護者(パソコン52,携帯電話53)及び関係者にEメールによる緊急通知を行う。また、保護者は、パソコン52や携帯電話53からサーバコンピュータ6にアクセスし、児童H(子機2)の場所を確認できる。この場合、サーバコンピュータ6へのアクセスは、IDとパスワードの入力が必要となる。以上が、地域見守システム1の基本的な動作となる。
ところで、従来におけるこの種の地域見守システムでは、被見守者を見守ることができれば足りるため、子機から親機側への一方向通信、即ち、子機から一定時間間隔毎に送信される定期通報を中継機を介して親機が受信する方式を採用しており、親機側から子機への情報の送信は行われていない。したがって、例えば、親機側から不審者の出没情報や個別の緊急連絡等の緊急情報を子機に連絡したい場合であっても対応できないなど、望ましい双方向通信機能を確保する観点からは改善の余地があった。
そこで、本実施形態に係る地域見守システム1aでは、中継機3…に、同期生成部8…により共通の同期用データDwを得るとともに、子機2…は、同期用データDwを取得して当該同期用データDwに同期して所定時間Tw間隔毎の受信専用期間Thを設定し、サーバコンピュータ6から特定の子機2に対して子機制御データDcを送信する際に、当該子機2の定期通報Ds…の間隔が通常時(Ts)のときは、中継機3からACK信号Dxに子機制御データDcを付加して送信する第一通信モードMfを実行し、かつ定期通報Ds…の間隔が通常時(Ts)よりも長い(Tm)ときは、中継機3から受信専用期間Thに子機制御データDcを送信する第二通信モードMsを実行するようにした双方向通信機能を備えて構成した。これにより、本実施形態に係る地域見守システム1aでは、サーバコンピュータ6(中継機3)側から子機2に対して、緊急情報等を迅速かつタイムリに送信することができる。
次に、本実施形態に係る地域見守システム1aに備える双方向通信機能について、図1〜図12を参照して具体的に説明する。
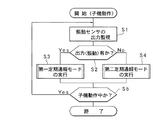
まず、予め、二つの通信モード、即ち、第一通信モードMfと第二通信モードMsを設定し、第一通信モードMfは、子機2の第一定期通報モードに対応して用いるとともに、第二通信モードMsは子機2の第二定期通報モードに対応して用いる。図8は、各通信モードの実行態様を示す。今、サーバコンピュータ6において、特定の子機2に対して緊急連絡したい事態が発生した場合を想定する。この場合、サーバコンピュータ6は、対応する子機制御データDcを出力する(ステップS11)。また、サーバコンピュータ6は、子機2からの定期通報の状況に応じて、第一定期通報モードが実行されているか第二定期通報モードが実行されているかの確認を行う(ステップS12)。この際、定期通報を3〔分〕間隔で受信していれば、第一定期通報モードであると判断し、定期通報を3〔分〕を超えて未受信であれば、第二定期通報モードであると判断する。
そして、子機2の状況が第一定期通報モード、即ち、子機2の定期通報Ds…の間隔が通常時である判断すれば、地域見守システム1は、第一通信モードMfを実行する(ステップS13,S14)。第一通信モードMfでは、所定時間Ts(例示は3〔分〕)間隔毎に子機2から送信される定期通報Dsを受信し、これに基づき中継機3から子機2にACK信号Dxを送信するため、このACK信号Dxに所定の子機制御データDcを付加して送信する。
以下、第一通信モードMfの具体的な動作について、図10及び図11(a)を参照して説明する。この場合、子機2では、第一定期通報モードが実行されており、子機2は、3〔分〕間隔毎の発呼時間になれば、定期通報Dsを送信する。送信時の周波数は、第一周波数Fsとなる429〔MHz〕帯である。定期通報時には、キャリアセンスを実行し、他のキャリアの有無を確認している。これにより、他のキャリアが無い回線空きの状態のときに、20〜200〔ms〕から乱数により発生するランダム待時間を経て送信を実行し、待機している複数の子機2…同士間のコリジョンの発生を回避している。
そして、サーバコンピュータ6において、特定の子機2に対して緊急連絡したい事態が発生すれば、サーバコンピュータ6は、親機4を介して全中継機3…に対応する子機制御データDcを転送する(T101)。転送は、第二アドホック通信部7t…を用いて行われ、転送時の周波数は、第二周波数Ftとなる950〔MHz〕帯である。これにより、全中継機3…は子機制御データDcを受信して保存(記憶)する(T102)。このように、サーバコンピュータ6により、全ての中継機3…に対して子機制御データDc…を転送するようにすれば、被見守者Hが移動中であり、時間の経過により受信する中継機3…が切換わる場合であっても、特定の子機2に対して、より確実に送信できる。
この後、特定の子機2から定期通報Dsが送信されれば、最も近い中継機3が受信して親機4側へ転送する(T103,T104)。この場合、特定の子機2による定期通報Dsであるから、この定期通報Dsに付加されているIDと親機4側から転送されている子機制御データDcに付加されているIDが一致する。したがって、中継機3は、当該子機2に対してACK信号Dxを送信する際に、当該ACK信号Dxに子機制御データDcを付加し、この子機制御データを付加したACK信号(Dx+Dc)を特定の子機2に対して送信する(T105)。この際、ACK信号(Dx+Dc)は、第一アドホック通信部7sを用いて送信され、送信時の周波数は、第一周波数Fsとなる429〔MHz〕帯である。これにより、当該子機2はACK信号(Dx+Dc)を受信する(T106)。
この子機制御データDcには、少なくとも、子機2のランプ9aを点灯又は点滅させる制御指令データ,及び/又は子機2のスピーカ9bから音を出力させる制御指令データが含まれる。したがって、例えば、緊急連絡したい内容が「急いで家に帰りなさい」という内容のときに、スピーカ9bから「ピー・ピー・ピー」の音を繰り返す鳴らすというルールを決めておけば、この制御指令データを含む子機制御データDcを送信することにより必要な情報伝達を実現できる。このように、子機制御データDcに、少なくとも、子機2のランプ9aを点灯又は点滅させる制御指令データ,及び/又は子機2のスピーカ9bから音を出力させる制御指令データを含ませれば、緊急情報等を子機2を携帯する児童Hに対して容易に伝達できる。特に、ランプ9aとスピーカ9bの双方を利用すれば、伝達の有効性及び確実性をより高めることができる。
また、子機2は子機制御データDcを受信することにより、対応するACK信号Dyを中継機3へ送信する(T107)。これにより、中継機3は当該ACK信号Dyを受信して親機4側へ転送する(T108)。そして、最終的にサーバコンピュータ6が受信すれば、第一通信モードMfによる子機2への通信処理を終了する(T109,ステップS15,S16)。このように、子機2が子機制御データDcを受信したならACK信号Dyを中継機3に送信するようにすれば、緊急情報等を児童Hに対して確実に送信したことを確認できるため、送信漏れ等を回避できる。
他方、図8のステップS12の確認処理において、子機2の状況が第二定期通報モード、即ち、子機2の定期通報Dsの間隔が通常時よりも長いと判断すれば、地域見守システム1は、第二通信モードMsを実行する(ステップS13,S17)。第二通信モードMsにおいては、中継機3…は同期生成部8…により共通の同期用データDwを得るとともに、子機2…は、同期用データDwを取得して当該同期用データDwに同期して所定時間Tw間隔毎の受信専用期間Thを設定する。そして、サーバコンピュータ6から特定の子機2に対して子機制御データDcを送信する際には、この受信専用期間Thを利用して、中継機3から子機2に子機制御データDcを送信する。
以下、第二通信モードMsの具体的な動作について、図10及び図11(b)を参照して説明する。この場合、子機2では、第二定期通報モードが実行されており、子機2は、1〔時間〕毎の発呼時間になれば、定期通報Dsを送信する。送信時の周波数は、第一周波数Fsとなる429〔MHz〕帯である。この際、子機2…同士のコリジョンの発生を回避する必要があるため、キャリアセンスを実行し、他のキャリアの有無を確認している。そして、他のキャリアが無い回線空きの状態のときに、乱数により発生するランダム待時間を経て送信を実行する。なお、図10中、tcが振動センサ21による振動が非検出となり、第一通信モードMfから第二通信モードMsに移行した時点を示している。
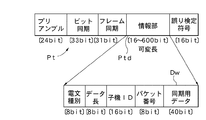
一方、各中継機3…は同期用データDwを取得する同期処理を行う(T201)。各中継機3…の同期処理は、GPS受信機8sの時刻情報から1pps(1秒間隔のクロック)の時刻データを得、この時刻データを同期用データDwとして用いる。したがって、各中継機3…は、この同期用データDwに同期した動作(処理)を行う。他方、各子機2…においても同期用データDwを取得する同期処理を行う(T202)。この場合、各子機2…は、所定の取得タイミング、例えば、起動時又は予め設定した時間間隔毎に、中継機3に対して同期用データDwを取得するためのデータ要求信号(パケット)Drを送信する。中継機3はデータ要求信号Drを受信することにより、同期用データDw(パケット)を子機2に送信する。この際、同期用データDw(パケット)は、第一アドホック通信部7sにより送信され、送信時の周波数は、第一周波数Fsとなる429〔MHz〕帯である。このときのパケットPtを図9に示す。このパケットPtの情報部Ptdに同期用データDwが含まれる。このように、所定の取得タイミングにより子機2から中継機3に対してデータ要求信号Drを送信し、中継機3から送信される同期用データDwを子機2が受信して取得するようにすれば、子機2は自局の定期通報Dsの送信を阻害することなく同期用データDwを取得することができる。
子機2は同期用データDwを受信することにより、自局の動作(処理)が同期用データDwに同期するように内部タイマを更新する。さらに、子機2では、所定の時間間隔Tw毎に受信専用期間Thを設定する。この場合、時間間隔Twは、例えば、第一定期通報モードにおける定期通報Dsの時間間隔Tsと同様の3〔分〕間隔に設定できる。また、受信専用期間Thは、子機制御データDcを確実に受信処理できる時間、例えば、数〔秒〕間程度を設定でき、この受信専用期間Thは、上述したように、自局の定期通報Dsの送信を阻害することのないように設定する。これにより、親機4を含む各中継機3…及び各子機2…は、GPSから得る時刻情報(同期用データDw)に対して正確に同期した状態となる。
そして、サーバコンピュータ6において、特定の子機2に対して緊急連絡したい事態が発生した場合、サーバコンピュータ6は、親機4を介して、対応する中継機(指定中継機)3に、対応する子機制御データDcを転送する(T203)。転送は、第二アドホック通信部7t…により行われ、転送時の周波数は、第二周波数Ftとなる950〔MHz〕帯である。この場合、サーバコンピュータ6(親機4)は、少なくとも、最初に、特定の子機2を直前に受信した中継機3を、指定中継機3として転送する。これにより、指定中継機3は子機制御データDcを受信して保存(記憶)する(T204)。このように、第二通信モードMsにおいて、親機4は、少なくとも最初に、特定の子機2を直前に受信した指定中継機3に対して子機制御データDcを転送するようにすれば、児童Hが移動していない状態における最も高い確率の居場所に対する中継機3に転送できるため、特定の子機2に対して、より確実に送信することができる。
また、指定中継機3は、受信専用期間Zhになったタイミングにより子機制御データDcを特定の子機2に送信する(T205)。子機制御データDcは、第一アドホック通信部7sにより送信され、送信時の周波数は、第一周波数Fsとなる429〔MHz〕帯である。この際、子機2は、指定中継機3に対して同期しているとともに、受信専用期間Zhでは受信専用になっているため、子機制御データDcを確実に受信できる(T206)。これにより、子機2では、前述した第一通信モードMfの場合と同様、子機制御データDcに基づく制御(処理)が行われる。さらに、子機2が子機制御データDcを受信すれば、対応するACK信号Dyを指定中継機3に送信する(T207)。そして、指定中継機3はACK信号Dyを受信し、親機4側へ転送する(T208)。
なお、第二通信モードMsでは、指定中継機3への転送時に、児童Hが、既に他に場所へ移動していることも考えられ、この場合には、子機2による受信ができない。したがって、指定中継機3が所定時間内にACK信号Dyを受信しないときは、子機制御データDcを周辺の中継機3…にブロードキャストするとともに、必要により全ての中継機3…にブロードキャストする(T209)。そして、最終的にサーバコンピュータ6がACK信号Dyを受信すれば、第二通信モードMsによる処理を終了する(T210,ステップS18,S16)。
図12は、本実施形態に係る地域見守システム1aを用いた際における子機2…の台数とパケット損失率の関係を示すシミュレーションデータ図を示す。シミュレーションは、想定できる最大規模の通学エリアAa、具体的には、一台の親機4を含む35台の中継器3…を設置した通学エリアAaを模倣し、各中継器3…の近辺に存在する子機2…の台数を16台から8台ずつ増加させてネットワーク負荷を上昇させ、その時のパケット損失率をシミュレーションしたものである。図12中、Lrは、従来例の場合、即ち、子機2…と中継器3…間,中継器3…同士間及び中継器3…と親機4間の通信を、それぞれ429MHz帯(第一周波数Fs)で行った場合のパケット損失率を示すとともに、Liは本実施形態の場合、即ち、子機2…と中継器3…間の通信を、429MHz帯(第一周波数Fs)で行うとともに、中継器3…同士間及び中継器3…と親機4間の通信を、950MHz帯(第二周波数Ft)で行った場合のパケット損失率をそれぞれ示す。図12から明らかなように、Lr(従来例)の場合には、子機2…が64台を越えた付近からパケット損失率が上昇をはじめるのに対して、Li(本実施形態)の場合には、Lr(従来例)の二倍の台数(128)を越えてもパケット損失率は上昇しない。
このように、本実施形態に係る地域見守システム1aによれば、子機2…と中継器3…間の通信に使用する第一周波数Fsに対して、中継器3…同士間の通信に使用する第二周波数Ft及び中継器3…と親機4間の通信に使用する第二周波数Ftを、少なくとも干渉が生じない異なる周波数に設定したため、各周波数Fs,Ft単位の通信トラフィックが減少し、全体のコリジョン及びパケット損失率を大きく低減させることができ、もって、子機2…全体の台数を大幅に増加させることができる。また、従来にようなコリジョン及びパケット損失率を低減させるためのガードタイムの設定が不要又は時間短縮が可能になるため、通信時における遅延時間の回避及び通信時間の短縮を図ることができるとともに、ガードタイムに基づく制御処理の煩雑化を回避することができる。特に、本発明に係る遠隔監視システム1は、このような通学エリアAaを監視する地域見守システム1aに利用して最適となり、児童等の被見守者Hに対する防犯性を高めることができることに加え、多くの児童等(子機2…)が任意の場所に集中したような場合であっても、コリジョンの発生を回避し、システムにおける確実な通信を確保できる。
次に、本発明に係る遠隔監視システム1の変更実施形態について、図13〜図15を参照して説明する。
図13は、本発明に係る遠隔監視システム1を、災害監視システム1bに利用する場合の変更実施形態を示す。
災害監視システム1bは、所定の監視エリアAとして、災害が発生する虞れのある予め選定した災害監視エリアAbを適用する。図13は、一例として、土石流や水害の発生する虞れのあるエリアを災害監視エリアAbとして選定したものであり、災害監視エリアAbにおける選定した複数の被監視場所Xb…にそれぞれ子機2…を設置する。この場合、子機2…は、地面Gに対して位置を固定して設置し、子機2…には、被監視場所Xb…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続する。地面Gの状態変化を検出可能なセンサ2s…としては、地面Gの移動の有無を検出可能なGPSユニット、地面Gの吸水量の目安となる雨量計等を適用できるとともに、地面Gの状態変化以外の状態を検出可能なセンサとして、気温センサ等を用いることができる。また、電源として太陽電池ユニット等を接続することができる。
さらに、子機2…から離れた場所であって、望ましくは災害の発生する虞れの無い場所に、複数の中継器3…を設置する。この場合、各中継器3…は、比較的高い位置に設置できるように、所定長さのポストの上端により支持する。なお、図13中、4は親機を示す。以上の点を除いて、基本的なシステム構成は、図1〜図5に示した地域見守システム1aと同様に構成できるとともに、その動作も同じとなる。
この災害監視システム1bでは、各センサ2s…により検出される検出データは、親機4まで転送する必要があるため、この転送は、子機2が送信する定期通報に用いるパケットPiを利用して行う。図14は、使用するパケットPiのデータフォーマットを示す。このデータフォーマットにおける情報部Pidには、前述したように、定期通報又は緊急通報の種別,子機2の固有ID等が含まれるが、この情報部Pidに検出データPidsが挿入され、基本的には、前述した地域見守システム1aにおける第二通信モードMsにより転送することができる。
このように、遠隔監視システム1を災害監視システム1bに利用すれば、少なくとも地面Gの状態変化等を事前に感知して自然災害等を未然に防止することができる。また、このような基本的な効果に加え、例えば、複数の子機2…を任意の一部エリアに対して重点的に追加設置するような場合であっても、コリジョンの発生を回避し、システムにおける確実な通信を確保できる利点がある。
一方、図15は、本発明に係る遠隔監視システム1を、農場監視システム1cに利用する場合の変更実施形態を示す。
農場監視システム1cは、所定の監視エリアAとして、予め選定した領域の農場Acを適用する。子機2…は、農場Acにおける選定した複数の被監視場所Xc…にそれぞれ設置する。この場合、子機2…は、地面Gに固定して設置し、子機2…には、被監視場所Xc…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続する。地面Gの状態変化を検出可能なセンサ2s…としては、地面GのpHを検出するpHセンサ、地面Gの導電性を検出する導電検出器等を適用できるとともに、地面Gの状態変化以外の状態を検出可能なセンサとして、気温センサ等を用いることができる。なお、41は太陽電池ユニットを示す。
また、子機2…から離れた場所には中継器3…を設置する。この場合、各中継器3…は、比較的高い位置に設置できるように、所定長さのポストの上端により支持する。図15中、4は親機を示す。以上の点を除いて、基本的なシステム構成は、図1〜図5及び図13に示した地域見守システム1a及び災害監視システム1bと同様に構成できるとともに、その動作も同じとなる。この農場監視システム1cにおいても、各センサ2s…により検出される検出データは、上述した災害監視システム1bの場合と同様、図14に示すパケットPiを利用して親機4に転送される。
このように、遠隔監視システム1を農場監視システム1cに利用すれば、少なくとも農地状態等に係わる各種データを迅速かつ容易に収集できる。しかも、これに加えて、例えば、複数の子機2…を一部領域に対して重点的に追加設置し、より緻密なデータ収集を行うような場合であっても、コリジョンの発生を回避し、システムにおける確実な通信を確保できる利点がある。
以上、好適実施形態(変更実施形態)について詳細に説明したが、本発明は、このような実施形態に限定されるものではなく、細部の構成,形状,手法,数量,数値等において、本発明の要旨を逸脱しない範囲で、任意に変更,追加,削除することができる。
例えば、第一周波数Fsは、第二周波数Ftよりも低い周波数に設定した場合を示したが、第一周波数Fsが第二周波数Ftよりも高い周波数に設定する場合を排除するものではない。また、同様に、中継器3…同士間における通信速度Bt及び中継器3…と親機4間における通信速度Btは、子機2…と中継器3…間における通信速度Bsよりも速い通信速度に設定する場合を示したが、遅い通信速度に設定する場合を排除するものではない。さらに、中継器3…同士間の通信に使用する第二周波数Ftに対して、中継器3…と親機4間の通信に使用する第二周波数Ftを、同一に設定した場合を示したが、これら二つの第二周波数Ftを異ならせる場合も排除するものではない。
本発明に係る遠隔監視システムは、地域インフラとして例示した、地域見守システム,災害監視システム,農場監視システムをはじめ、独居老人の安否やバスロケーション等、遠隔で監視する必要がある各種の遠隔監視システムに利用できる。
1:遠隔監視システム,1a:地域見守システム,1b:災害監視システム,1c:農場監視システム,2…:子機,2t…:無線通信部,2s…:センサ,3…:中継器,3t…:アドホック通信部,4:親機,4t:アドホック通信部,6:サーバコンピュータ,7s:第一アドホック通信部,7t:第二アドホック通信部,A:所定の監視エリア,Aa:通学エリア,Ab:災害監視エリア,Ac:農場,Ts:所定時間,Ds…:定期通報,Dx…:ACK信号,Fs:第一周波数,Ft:第二周波数,H:被見守者,Xb…:被監視場所,Xc…:被監視場所,G:地面
本発明に係る遠隔監視システム1は、上述した課題を解決するため、無線IDタグを設けた無線通信部2t…を有する複数の子機2…と、無線IDタグを設けたアドホック通信部3t…を有し、かつ所定の監視エリアA内における複数の異なる場所にそれぞれ設置した複数の中継機3…と、アドホック通信部4tを有する少なくとも一台の親機4と、親機4に接続したサーバコンピュータ6とを備え、少なくとも所定時間Ts間隔毎に子機2…から定期通報Ds…を送信するとともに、この定期通報Ds…を中継機3…が受信したなら子機2…にACK信号Dx…を送信する機能を有する遠隔監視システムであって、中継機3…に、子機2…に対して通信を行う第一アドホック通信部7sと他の中継機3…及び親機4に対して通信を行う第二アドホック通信部7tとを設けるとともに、子機2…と中継機3…間の通信に使用する周波数(第一周波数)Fsに対して、中継機3…同士間の通信に使用する周波数(第二周波数)Ft及び中継機3…と親機4間の通信に使用する周波数(第二周波数)Ftを、少なくとも干渉が生じない異なる周波数に設定することを特徴とする。
この場合、発明の好適な態様により、第一周波数Fsは、第二周波数Ftよりも低い周波数に設定することができる。また、中継機3…同士間における通信速度Bt及び中継機3…と親機4間における通信速度Btは、子機2…と中継機3…間における通信速度Bsよりも速い通信速度に設定することができる。他方、遠隔監視システム1は、地域見守システム1a,災害監視システム1b,農場監視システム1c等に利用することができる。地域見守システム1aに利用する場合には、所定の監視エリアAとして、児童等の被見守者Hが移動する通学エリアAaを適用するとともに、子機2…を、被見守者H…が携帯可能に構成することができる。災害監視システム1bに利用する場合には、所定の監視エリアAとして、災害が発生する虞れのある予め選定した災害監視エリアAbを適用するとともに、子機2…を、災害監視エリアAbにおける所定の被監視場所Xb…に設置し、かつ子機2…に、被監視場所Xb…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続することができる。農場監視システム1cに利用する場合には、所定の監視エリアAとして、予め選定した領域の農場Acを適用するとともに、子機2…を、農場Acにおける所定の被監視場所Xc…に設置し、かつ子機2…に、被監視場所Xc…における少なくとも地面Gの状態変化を検出可能な一又は二以上のセンサ2s…を接続することができる。
(1) 子機2…と中継機3…間の通信に使用する周波数(第一周波数)Fsに対して、中継機3…同士間の通信に使用する周波数(第二周波数)Ft及び中継機3…と親機4間の通信に使用する周波数(第二周波数)Ftを、少なくとも干渉が生じない異なる周波数に設定するため、各周波数Fs,Ft単位の通信トラフィックが減少し、全体のコリジョン及びパケット損失率を大きく低減させることができ、もって、子機2…全体の台数を大幅に増加させることができる。
(2) 従来のようなコリジョン及びパケット損失率を低減させるためのガードタイムの設定が不要又は時間短縮が可能になるため、通信時における遅延時間の回避及び通信時間の短縮を図ることができるとともに、ガードタイムに基づく制御処理の煩雑化を回避することができる。
(4) 好適な態様により、中継機3…同士間における通信速度Bt及び中継機3…と親機4間における通信速度Btを、子機2…と中継機3…間における通信速度Bsよりも速い通信速度に設定すれば、中継機3…は、比較的見晴らしの良い場所を選定し、かつ高い位置に固定して設置するため、中継機3…同士間、又は中継機3と親機4間における通信速度の高速化が可能となり、通信時間の更なる短縮を図ることができる。
無線通信部2tの無線仕様は、電力線からの自立を最優先とし、到達距離が長く、回折性及び透過性による接続能力が高い特定小電力無線(出力10〔mW〕)を使用する。特に、周波数は、第一周波数Fsとなる429〔MHz〕帯を使用する。通信速度Bsは、1.2k〔bps〕となる。また、変調方式は、2値FSK,符号方式はマンチェスター符号を用いる。したがって、子機2…と中継機3…間の通信は、第一周波数Fsである429〔MHz〕帯を使用して行われる。この第一周波数Fsは、後述する中継機3…同士間の通信に使用する第二周波数Ft(950MHz帯)及び中継機3…と親機4間の通信に使用する第二周波数Ft(950MHz帯)よりも低い周波数に設定する。このように、第一周波数Fsを第二周波数Ftよりも低い周波数に設定すれば、子機2…を携帯する児童等の被見守者Hが、比較的見通しの悪い街中等を移動する場合であっても、電波の回折性及び透過性が良好となり、子機2…との通信を確実かつ安定に行うことができ、信頼性の高いシステムを構築できる利点がある。
さらに、中継機処理部36には、無線IDタグを設けたアドホック通信部7を接続する。アドホック通信部7は、子機2…に対して通信を行う第一アドホック通信部7sと、他の中継機3…及び親機4に対して通信を行う第二アドホック通信部7tとを備える。この場合、第一アドホック通信部7sは、子機2…に対する通信を行うため、前述した子機2…の無線通信部2tと基本的には同じ機能を有しており、周波数は、第一周波数Fsとなる429〔MHz〕帯を使用する。他方、第二アドホック通信部7tは、他の中継機3…間及び親機4との通信に用いる。第二アドホック通信部7tも基本的な構成は、第一アドホック通信部7sと同じであるが、周波数は、第二周波数Ftとなる950〔MHz〕帯を使用する。したがって、第二アドホック通信部7tの無線仕様は、周波数が第二周波数Ftとなる950〔MHz〕帯となる特定小電力無線(出力10〔mW〕)を使用し、通信速度Btは66.6k〔bps〕となる。この場合、第二周波数Ftは、前述した第一周波数Fsに対して、少なくとも干渉が生じない異なる周波数であって、第一周波数Fsよりも高い周波数に設定する。これにより、中継機3…同士間及び中継機3…と親機4間の通信速度Bt(66.6k〔bps〕)は、子機2…と中継機3…間の通信速度Bs(1.2k〔bps〕)よりも数十倍もの速い通信速度となる。中継機3…は、比較的見晴らしの良い場所を選定し、かつ高い位置に固定して設置するため、中継機3…同士間、又は中継機3と親機4間においては、子機2…間との通信に要求される回折性及び透過性は要求されない。これにより、通信速度Btの高速化が可能となり、通信時間の更なる短縮を図れる利点がある。
ところで、950〔MHz〕帯となる特定小電力無線は、国内において、2008年度より新たに使用が認められた周波数帯である。一方、例示のような地域見守システム1aでは、最も近い中継機3…間及び中継機3…と親機4間の直線距離は、0.5〜2〔km〕程度となる。そこで、周波数を950〔MHz〕帯、送信出力を10〔mW〕、通信速度を66.6k〔bps〕に設定し、1〔km〕程度の長距離においても通信が可能であるか否かの通信実験を行った。通信実験は、障害物の無い屋外において、送信端末を地上から高さ5〔m〕、受信端末を高さ1.7〔m〕の位置に置き、受信端末を送信端末から遠ざけながら、50〔m〕毎にRSSIの測定を10〔回〕行い、その平均値を求めた。測定したRSSIは、電波を1〔ms〕受信した内での最大値である。なお、RSSIは、端末内の無線チップが出力する受信信号強度である。図2に通信実験の結果を示す。端末の固体差も多少あるが、RSSI=50前後の時に、受信電力は、−100〔dBm〕程度であった。また、1〔km〕の地点において、パケットの送受信が可能であることも確認できた。
なお、子機2…,中継機3…及び親機4の無線仕様に用いる特定小電力無線は、他の無線に比べて速いとは言えないため、ネットワークに使用するアプリケーションは文字情報が中心となる。また、コリジョンを回避するため、CSMA/CA with Ack方式を採用するとともに、無線通信システムに適したルーティングプロトコルとして、中継機3…が定期的に各中継機3…の経路情報を受信し、自局の中継経路を構築するプロアクティブ方式を用いたアドホックネットワークシステムを用いる。CSMA/CA with Ack方式とは、通信路が一定時間以上継続して空いていることを確認してから各無線端末がデータを送信する方式であり、実際にデータが正しく送信されたことは、受信側からのACK信号の到着をもって判定する。プロアクティブ方式とは、各無線端末間が、通信に先立って無線ネットワークの状況を確認し、中継経路を構築しておく方式である。アドホックネットワークシステムとは、基地局などの固定局を必要とせず、半固定の無線端末間でデータをホッピングすることにより、柔軟に宛先局へデータ伝送を行う自立分散型ネットワークである。
図7に、子機2が送信するパケットPiのデータフォーマットを示す。このデータフォーマットにおける情報部Pidには、定期通報又は緊急通報の種別,子機2の固有ID等が含まれており、通常時は、定期通報が行われる。定期通報を各中継機3…が受信すれば、受信した各中継機3…は、その受信電界強度データを情報部Pidに付加したパケットを順次親機4まで中継(転送)する。この場合、各中継機3…の中継経路は予め設定されているとともに、中継機3…同士間及び中継機3…と親機4間は、第二アドホック通信部7t…を用いて通信が行われ、通信時の周波数は、第二周波数Ft(950〔MHz〕帯)である。図1に、第一周波数Fs(429〔MHz〕帯)を用いた子機2…と中継機3…間,第二周波数Ft(950〔MHz〕帯)を用いた中継機3…同士間及び中継機3…と親機4間における通信イメージを示す。
図12は、本実施形態に係る地域見守システム1aを用いた際における子機2…の台数とパケット損失率の関係を示すシミュレーションデータ図を示す。シミュレーションは、想定できる最大規模の通学エリアAa、具体的には、一台の親機4を含む35台の中継機3…を設置した通学エリアAaを模倣し、各中継機3…の近辺に存在する子機2…の台数を16台から8台ずつ増加させてネットワーク負荷を上昇させ、その時のパケット損失率をシミュレーションしたものである。図12中、Lrは、従来例の場合、即ち、子機2…と中継機3…間,中継機3…同士間及び中継機3…と親機4間の通信を、それぞれ429MHz帯(第一周波数Fs)で行った場合のパケット損失率を示すとともに、Liは本実施形態の場合、即ち、子機2…と中継機3…間の通信を、429MHz帯(第一周波数Fs)で行うとともに、中継機3…同士間及び中継機3…と親機4間の通信を、950MHz帯(第二周波数Ft)で行った場合のパケット損失率をそれぞれ示す。図12から明らかなように、Lr(従来例)の場合には、子機2…が64台を越えた付近からパケット損失率が上昇をはじめるのに対して、Li(本実施形態)の場合には、Lr(従来例)の二倍の台数(128)を越えてもパケット損失率は上昇しない。
このように、本実施形態に係る地域見守システム1aによれば、子機2…と中継機3…間の通信に使用する第一周波数Fsに対して、中継機3…同士間の通信に使用する第二周波数Ft及び中継機3…と親機4間の通信に使用する第二周波数Ftを、少なくとも干渉が生じない異なる周波数に設定したため、各周波数Fs,Ft単位の通信トラフィックが減少し、全体のコリジョン及びパケット損失率を大きく低減させることができ、もって、子機2…全体の台数を大幅に増加させることができる。また、従来のようなコリジョン及びパケット損失率を低減させるためのガードタイムの設定が不要又は時間短縮が可能になるため、通信時における遅延時間の回避及び通信時間の短縮を図ることができるとともに、ガードタイムに基づく制御処理の煩雑化を回避することができる。特に、本発明に係る遠隔監視システム1は、このような通学エリアAaを監視する地域見守システム1aに利用して最適となり、児童等の被見守者Hに対する防犯性を高めることができることに加え、多くの児童等(子機2…)が任意の場所に集中したような場合であっても、コリジョンの発生を回避し、システムにおける確実な通信を確保できる。
さらに、子機2…から離れた場所であって、望ましくは災害の発生する虞れの無い場所に、複数の中継機3…を設置する。この場合、各中継機3…は、比較的高い位置に設置できるように、所定長さのポストの上端により支持する。なお、図13中、4は親機を示す。以上の点を除いて、基本的なシステム構成は、図1〜図5に示した地域見守システム1aと同様に構成できるとともに、その動作も同じとなる。
また、子機2…から離れた場所には中継機3…を設置する。この場合、各中継機3…は、比較的高い位置に設置できるように、所定長さのポストの上端により支持する。図15中、4は親機を示す。以上の点を除いて、基本的なシステム構成は、図1〜図5及び図13に示した地域見守システム1a及び災害監視システム1bと同様に構成できるとともに、その動作も同じとなる。この農場監視システム1cにおいても、各センサ2s…により検出される検出データは、上述した災害監視システム1bの場合と同様、図14に示すパケットPiを利用して親機4に転送される。
例えば、第一周波数Fsは、第二周波数Ftよりも低い周波数に設定した場合を示したが、第一周波数Fsが第二周波数Ftよりも高い周波数に設定する場合を排除するものではない。また、同様に、中継機3…同士間における通信速度Bt及び中継機3…と親機4間における通信速度Btは、子機2…と中継機3…間における通信速度Bsよりも速い通信速度に設定する場合を示したが、遅い通信速度に設定する場合を排除するものではない。さらに、中継機3…同士間の通信に使用する第二周波数Ftに対して、中継機3…と親機4間の通信に使用する第二周波数Ftを、同一に設定した場合を示したが、これら二つの第二周波数Ftを異ならせる場合も排除するものではない。
1:遠隔監視システム,1a:地域見守システム,1b:災害監視システム,1c:農場監視システム,2…:子機,2t…:無線通信部,2s…:センサ,3…:中継機,3t…:アドホック通信部,4:親機,4t:アドホック通信部,6:サーバコンピュータ,7s:第一アドホック通信部,7t:第二アドホック通信部,A:所定の監視エリア,Aa:通学エリア,Ab:災害監視エリア,Ac:農場,Ts:所定時間,Ds…:定期通報,Dx…:ACK信号,Fs:第一周波数,Ft:第二周波数,H:被見守者,Xb…:被監視場所,Xc…:被監視場所,G:地面
Claims (6)
- 無線IDタグを設けた無線通信部を有する複数の子機と、無線IDタグを設けたアドホック通信部を有し、かつ所定の監視エリア内における複数の異なる場所にそれぞれ設置した複数の中継機と、アドホック通信部を有する少なくとも一台の親機と、前記親機に接続したサーバコンピュータとを備え、少なくとも所定時間間隔毎に前記子機から定期通報を送信するとともに、この定期通報を前記中継機が受信したなら前記子機にACK信号を送信する機能を有する遠隔監視システムであって、前記中継器に、前記子機に対して通信を行う第一アドホック通信部と他の中継器及び前記親機に対して通信を行う第二アドホック通信部とを設けるとともに、前記子機と前記中継器間の通信に使用する周波数(第一周波数)に対して、前記中継器同士間の通信に使用する周波数(第二周波数)及び前記中継器と前記親機間の通信に使用する周波数(第二周波数)を、少なくとも干渉が生じない異なる周波数に設定することを特徴とする遠隔監視システム。
- 前記第一周波数は、前記第二周波数よりも低い周波数に設定することを特徴とする請求項1記載の遠隔監視システム。
- 前記中継器同士間における通信速度及び前記中継器と前記親機間における通信速度は、前記子機と前記中継器間における通信速度よりも速い通信速度に設定することを特徴とする請求項1記載の遠隔監視システム。
- 前記所定の監視エリアとして、児童等の被見守者が移動する通学エリアを適用するとともに、前記子機を、前記被見守者が携帯可能に構成することを特徴とする請求項1〜3のいずれかに記載の遠隔監視システム。
- 前記所定の監視エリアとして、災害が発生する虞れのある予め選定した災害監視エリアを適用するとともに、前記子機を、前記災害監視エリアにおける所定の被監視場所に設置し、かつ前記子機に、前記被監視場所における少なくとも地面の状態変化を検出可能な一又は二以上のセンサを接続してなることを特徴とする請求項1〜3のいずれかに記載の遠隔監視システム。
- 前記所定の監視エリアとして、予め選定した領域の農場を適用するとともに、前記子機を、前記農場における所定の被監視場所に設置し、かつ前記子機に、前記被監視場所における少なくとも地面の状態変化を検出可能な一又は二以上のセンサを接続してなることを特徴とする請求項1〜3のいずれかに記載の遠隔監視システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010266116A JP2012118655A (ja) | 2010-11-30 | 2010-11-30 | 遠隔監視システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010266116A JP2012118655A (ja) | 2010-11-30 | 2010-11-30 | 遠隔監視システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012118655A true JP2012118655A (ja) | 2012-06-21 |
Family
ID=46501425
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010266116A Pending JP2012118655A (ja) | 2010-11-30 | 2010-11-30 | 遠隔監視システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012118655A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017059251A (ja) * | 2016-11-11 | 2017-03-23 | 能美防災株式会社 | 地域防災情報システム |
| JP2017068857A (ja) * | 2016-11-11 | 2017-04-06 | 能美防災株式会社 | 地域防災情報システム |
| JP2018056972A (ja) * | 2016-09-30 | 2018-04-05 | サクサ株式会社 | 通信システム |
| JP6437152B1 (ja) * | 2018-06-26 | 2018-12-12 | 正直 井内 | 樹木見守りシステム |
| TWI766226B (zh) * | 2019-01-29 | 2022-06-01 | 日商松下知識產權經營股份有限公司 | 通信系統及通信方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002057755A (ja) * | 2000-08-11 | 2002-02-22 | Katsuya Inoue | 携帯電話のハンズフリーキット |
| JP2003506962A (ja) * | 1999-08-04 | 2003-02-18 | アセロス コミュニケーションズ インク. | 変化するデータ速度を有する無線通信方法および装置 |
| JP2005515695A (ja) * | 2002-01-10 | 2005-05-26 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 管理及び制御のための階層型無線自己組織ネットワーク |
| JP2008113180A (ja) * | 2006-10-30 | 2008-05-15 | Carecom:Kk | ナースコールシステム |
| JP2008293056A (ja) * | 2007-05-22 | 2008-12-04 | Shinko Electric Co Ltd | 災害事前検知システム |
| JP2009244934A (ja) * | 2008-03-28 | 2009-10-22 | Panasonic Electric Works Co Ltd | データ収集装置 |
| JP2009265030A (ja) * | 2008-04-28 | 2009-11-12 | Masayoshi Takei | 自然災害発生検知システム |
| JP2010045490A (ja) * | 2008-08-11 | 2010-02-25 | Shinshu Univ | 地域防犯システムの制御方法 |
-
2010
- 2010-11-30 JP JP2010266116A patent/JP2012118655A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003506962A (ja) * | 1999-08-04 | 2003-02-18 | アセロス コミュニケーションズ インク. | 変化するデータ速度を有する無線通信方法および装置 |
| JP2002057755A (ja) * | 2000-08-11 | 2002-02-22 | Katsuya Inoue | 携帯電話のハンズフリーキット |
| JP2005515695A (ja) * | 2002-01-10 | 2005-05-26 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 管理及び制御のための階層型無線自己組織ネットワーク |
| JP2008113180A (ja) * | 2006-10-30 | 2008-05-15 | Carecom:Kk | ナースコールシステム |
| JP2008293056A (ja) * | 2007-05-22 | 2008-12-04 | Shinko Electric Co Ltd | 災害事前検知システム |
| JP2009244934A (ja) * | 2008-03-28 | 2009-10-22 | Panasonic Electric Works Co Ltd | データ収集装置 |
| JP2009265030A (ja) * | 2008-04-28 | 2009-11-12 | Masayoshi Takei | 自然災害発生検知システム |
| JP2010045490A (ja) * | 2008-08-11 | 2010-02-25 | Shinshu Univ | 地域防犯システムの制御方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018056972A (ja) * | 2016-09-30 | 2018-04-05 | サクサ株式会社 | 通信システム |
| JP2017059251A (ja) * | 2016-11-11 | 2017-03-23 | 能美防災株式会社 | 地域防災情報システム |
| JP2017068857A (ja) * | 2016-11-11 | 2017-04-06 | 能美防災株式会社 | 地域防災情報システム |
| JP6437152B1 (ja) * | 2018-06-26 | 2018-12-12 | 正直 井内 | 樹木見守りシステム |
| JP2020003900A (ja) * | 2018-06-26 | 2020-01-09 | 正直 井内 | 樹木見守りシステム |
| TWI766226B (zh) * | 2019-01-29 | 2022-06-01 | 日商松下知識產權經營股份有限公司 | 通信系統及通信方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10638542B2 (en) | Gateway device and communication system | |
| KR101220911B1 (ko) | 근거리 무선 통신망을 기반으로 하는 위치 추적 시스템 및 그 방법 | |
| EP1699183B1 (en) | Location system for bluetooth enabled devices | |
| US7961092B2 (en) | Active wireless tag and auxiliary device for use with monitoring center for tracking individuals or objects | |
| US10536901B2 (en) | Systems and methods for providing communications within wireless sensor networks based on a periodic beacon signal | |
| JP4805986B2 (ja) | 地域防犯システムの制御方法 | |
| US10455368B2 (en) | Systems and methods for providing communications within wireless sensor networks based on at least one periodic guaranteed time slot for sensor nodes | |
| US10805900B2 (en) | Method and device for deriving location | |
| JP2012118655A (ja) | 遠隔監視システム | |
| JP6282840B2 (ja) | 無線通信装置及び無線情報収集システム | |
| JP2013235554A (ja) | 警報連携システム | |
| JP2013030871A (ja) | 無線通信システムおよび無線中継局 | |
| US8686849B2 (en) | Method of alarm handling in wireless sensor networks | |
| JP4841237B2 (ja) | 無線通信システム | |
| CN115643595A (zh) | 一种宽窄带融合自组网通信装置及其控制方法 | |
| JP4820797B2 (ja) | 地域防犯システムの制御方法 | |
| KR101371662B1 (ko) | 미아 추적 시스템 장치 및 그 방법 | |
| JP5346825B2 (ja) | 地域見守システムの通信方法 | |
| JP5961007B2 (ja) | 無線中継システム | |
| JP4976258B2 (ja) | 地域防犯システムの送信方法 | |
| JP5943638B2 (ja) | 無線中継システム | |
| JP5961006B2 (ja) | 無線中継システム | |
| JP5943640B2 (ja) | 無線中継システム | |
| JP5525833B2 (ja) | 地域見守システムの送信方法 | |
| JP5943641B2 (ja) | 無線中継システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131029 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140806 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141210 |