JP2011251504A - 印刷機の接触圧調整方法及び接触圧調整装置 - Google Patents
印刷機の接触圧調整方法及び接触圧調整装置 Download PDFInfo
- Publication number
- JP2011251504A JP2011251504A JP2010128572A JP2010128572A JP2011251504A JP 2011251504 A JP2011251504 A JP 2011251504A JP 2010128572 A JP2010128572 A JP 2010128572A JP 2010128572 A JP2010128572 A JP 2010128572A JP 2011251504 A JP2011251504 A JP 2011251504A
- Authority
- JP
- Japan
- Prior art keywords
- wiping
- contact pressure
- roll
- pressure adjusting
- rotating body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Rotary Presses (AREA)
Abstract
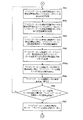
【解決手段】凹版胴17に対するワイピング・ロール20の接触圧(負荷)をワイピング・ロール駆動モータ40のトルク値(電流値)に換算し、これをワイピング・ロール接触圧調整用モータ30にフィードバックするようにした。
【選択図】図5
Description
第1の回転体と、
前記第1の回転体に対接する第2の回転体と、
前記第2の回転体を回転駆動する為の第2の回転体駆動用モータと、
前記第1の回転体に対する前記第2の回転体の接触圧を調整する為の接触圧調整機構と、
前記接触圧調整機構を駆動する接触圧調整モータと、
を備えた印刷機の接触圧調整方法において、
前記第2の回転体駆動用モータを駆動するトルク値に応じて、前記接触圧調整モータを駆動すること、
を特徴とする。
前記第2の回転体駆動用モータと前記第2の回転体間の駆動系に、減速機が介装されていることを特徴とする。
前記第1の回転体は凹版が装着された凹版胴であり、前記第2の回転体は前記凹版胴に装着された凹版の余分なインキを掻き取る為のワイピング・ロールであり、前記印刷機は凹版印刷機であることを特徴とする。
第1の回転体と、
前記第1の回転体に対接する第2の回転体と、
前記第2の回転体を回転駆動する為の第2の回転体駆動用モータと、
前記第1の回転体に対する前記第2の回転体の接触圧を調整する為の接触圧調整機構と、
前記接触圧調整機構を駆動する接触圧調整モータと、
を備えた印刷機の接触圧調整装置において、
前記第2の回転体駆動用モータを駆動するトルク値に応じて、前記接触圧調整モータを駆動する制御装置を備えたこと、
を特徴とする。
前記第2の回転体駆動用モータと前記第2の回転体間の駆動系に、減速機が介装されていることを特徴とする。
前記第1の回転体は凹版が装着された凹版胴であり、前記第2の回転体は前記凹版胴に装着された凹版の余分なインキを掻き取る為のワイピング・ロールであり、前記印刷機は凹版印刷機であることを特徴とする。
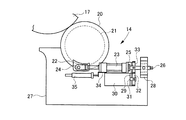
11 凹版印刷部
14 ワイピング装置
17 凹版胴
20 ワイピング・ロール
23 ワイピング・ロール着脱用油圧シリンダ
30 ワイピング・ロール接触圧調整用モータ
40 ワイピング・ロール駆動モータ
46 減速機
50 ワイピング・ロール駆動モータ及びワイピング・ロール接触圧調整用モータの駆動制御装置
130 ワイピング・ロール駆動モータの現在の電流値表示器
131 ワイピング・ロール接触圧調整用モータの現在位置表示器
143 ワイピング・ロール駆動モータ・ドライバ
144 ワイピング・ロール駆動モータ用ロータリ・エンコーダ
145 ワイピング・ロール接触圧調整用モータ・ドライバ
147 ワイピング・ロール接触圧調整用モータ用ロータリ・エンコーダ
Claims (6)
- 第1の回転体と、
前記第1の回転体に対接する第2の回転体と、
前記第2の回転体を回転駆動する為の第2の回転体駆動用モータと、
前記第1の回転体に対する前記第2の回転体の接触圧を調整する為の接触圧調整機構と、
前記接触圧調整機構を駆動する接触圧調整モータと、
を備えた印刷機の接触圧調整方法において、
前記第2の回転体駆動用モータを駆動するトルク値に応じて、前記接触圧調整モータを駆動すること、
を特徴とする印刷機の接触圧調整方法。 - 前記第2の回転体駆動用モータと前記第2の回転体間の駆動系に、減速機が介装されていることを特徴とする請求項1に記載の印刷機の接触圧調整方法。
- 前記第1の回転体は凹版が装着された凹版胴であり、前記第2の回転体は前記凹版胴に装着された凹版の余分なインキを掻き取る為のワイピング・ロールであり、前記印刷機は凹版印刷機であることを特徴とする請求項1に記載の印刷機の接触圧調整方法。
- 第1の回転体と、
前記第1の回転体に対接する第2の回転体と、
前記第2の回転体を回転駆動する為の第2の回転体駆動用モータと、
前記第1の回転体に対する前記第2の回転体の接触圧を調整する為の接触圧調整機構と、
前記接触圧調整機構を駆動する接触圧調整モータと、
を備えた印刷機の接触圧調整装置において、
前記第2の回転体駆動用モータを駆動するトルク値に応じて、前記接触圧調整モータを駆動する制御装置を備えたこと、
を特徴とする印刷機の接触圧調整装置。 - 前記第2の回転体駆動用モータと前記第2の回転体間の駆動系に、減速機が介装されていることを特徴とする請求項4に記載の印刷機の接触圧調整装置。
- 前記第1の回転体は凹版が装着された凹版胴であり、前記第2の回転体は前記凹版胴に装着された凹版の余分なインキを掻き取る為のワイピング・ロールであり、前記印刷機は凹版印刷機であることを特徴とする請求項4に記載の印刷機の接触圧調整装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010128572A JP2011251504A (ja) | 2010-06-04 | 2010-06-04 | 印刷機の接触圧調整方法及び接触圧調整装置 |
| CN201110145186.6A CN102267276B (zh) | 2010-06-04 | 2011-05-31 | 印刷机的接触压力调整方法和接触压力调整装置 |
| CN201510455294.1A CN105150668A (zh) | 2010-06-04 | 2011-05-31 | 印刷机的接触压力调整方法和接触压力调整装置 |
| US13/152,951 US9132624B2 (en) | 2010-06-04 | 2011-06-03 | Contact pressure adjusting method and contact pressure adjusting apparatus for printing press |
| EP20110168747 EP2392461B1 (en) | 2010-06-04 | 2011-06-06 | Contact pressure adjusting method and contact pressure adjusting apparatus for printing press |
| US14/818,032 US20150336376A1 (en) | 2010-06-04 | 2015-08-04 | Contact pressure adjusting method and contact pressure adjusting apparatus for printing press |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010128572A JP2011251504A (ja) | 2010-06-04 | 2010-06-04 | 印刷機の接触圧調整方法及び接触圧調整装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011251504A true JP2011251504A (ja) | 2011-12-15 |
| JP2011251504A5 JP2011251504A5 (ja) | 2013-07-18 |
Family
ID=45415842
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010128572A Pending JP2011251504A (ja) | 2010-06-04 | 2010-06-04 | 印刷機の接触圧調整方法及び接触圧調整装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011251504A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016537225A (ja) * | 2013-11-21 | 2016-12-01 | ケーニツヒ ウント バウエル アクチエンゲゼルシヤフトKoenig & Bauer AG | 凹版印刷機械及び凹版印刷機械を備える印刷施設 |
| US10124572B2 (en) | 2014-09-17 | 2018-11-13 | Komori Corporation | Method and device for adjusting contact pressure of intaglio printer wiping roller |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58108147A (ja) * | 1981-12-08 | 1983-06-28 | ハイデルベルガ−・ドルツクマシ−ネン・アクチエンゲゼルシヤフト | 多色輪転印刷機におけるレジスタ−誤差を減少させる方法および装置 |
| JPH0437542A (ja) * | 1990-06-01 | 1992-02-07 | Komori Corp | 凹版印刷機のワイピング装置 |
| JPH09193337A (ja) * | 1996-01-24 | 1997-07-29 | Komori Corp | 印刷機の接触圧調整装置 |
| JPH11159587A (ja) * | 1997-11-28 | 1999-06-15 | Koyo Seiko Co Ltd | ベルトテンショナ機構 |
| JP2005007628A (ja) * | 2003-06-17 | 2005-01-13 | National Printing Bureau | 凹版印刷機のワイピングローラ自動制御方法及び自動制御装置 |
-
2010
- 2010-06-04 JP JP2010128572A patent/JP2011251504A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58108147A (ja) * | 1981-12-08 | 1983-06-28 | ハイデルベルガ−・ドルツクマシ−ネン・アクチエンゲゼルシヤフト | 多色輪転印刷機におけるレジスタ−誤差を減少させる方法および装置 |
| JPH0437542A (ja) * | 1990-06-01 | 1992-02-07 | Komori Corp | 凹版印刷機のワイピング装置 |
| JPH09193337A (ja) * | 1996-01-24 | 1997-07-29 | Komori Corp | 印刷機の接触圧調整装置 |
| JPH11159587A (ja) * | 1997-11-28 | 1999-06-15 | Koyo Seiko Co Ltd | ベルトテンショナ機構 |
| JP2005007628A (ja) * | 2003-06-17 | 2005-01-13 | National Printing Bureau | 凹版印刷機のワイピングローラ自動制御方法及び自動制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016537225A (ja) * | 2013-11-21 | 2016-12-01 | ケーニツヒ ウント バウエル アクチエンゲゼルシヤフトKoenig & Bauer AG | 凹版印刷機械及び凹版印刷機械を備える印刷施設 |
| US10124572B2 (en) | 2014-09-17 | 2018-11-13 | Komori Corporation | Method and device for adjusting contact pressure of intaglio printer wiping roller |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5125339A (en) | Apparatus for displacing shaft-mounting bearing stands | |
| JPH0885196A (ja) | オフセット印刷機 | |
| EP0694384A2 (en) | Cylinder throw-on and throw-off mechanism for printing press | |
| JP3423627B2 (ja) | 輪転印刷機 | |
| US6289805B1 (en) | Device and method for driving a printing cylinder | |
| US20020005127A1 (en) | Printing press | |
| JP2011251504A (ja) | 印刷機の接触圧調整方法及び接触圧調整装置 | |
| JP5498349B2 (ja) | 凹版印刷機の接触圧調整方法及び接触圧調整装置 | |
| US6498445B2 (en) | Oscillation apparatus for oscillating roller | |
| EP3196019B1 (en) | Method and device for adjusting contact pressure of intaglio printer wiping roller | |
| CN208930909U (zh) | 一种可换滚筒全轮转印刷机的调压及合压装置 | |
| CN210390422U (zh) | 一种径向在线调速印刷装置 | |
| EP1314560B1 (en) | Printing press | |
| JP2011251505A (ja) | 印刷機の接触圧調整方法及び接触圧調整装置 | |
| JP4190889B2 (ja) | 印刷ユニットを駆動する方法 | |
| US20150336376A1 (en) | Contact pressure adjusting method and contact pressure adjusting apparatus for printing press | |
| EP1795350B1 (en) | Ink transport route switching method and apparatus in inking device of printing press | |
| JP5629550B2 (ja) | 凹版印刷機の接触圧調整方法及び接触圧調整装置 | |
| JP6399647B2 (ja) | 凹版印刷機のワイピング・ローラの接触圧調整方法及び装置 | |
| CN108839423A (zh) | 一种可换滚筒全轮转印刷机的调压及合压装置 | |
| JPH0734670Y2 (ja) | ニップ圧調節機構 | |
| JP2537504Y2 (ja) | 印刷機におけるインキング装置の駆動停止装置 | |
| JP2007509780A (ja) | インカ駆動シャフトレスユニット | |
| JPH08118588A (ja) | 版胴支持装置 | |
| JPH08224860A (ja) | ロールを負荷する方法と装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130603 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130603 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140610 |