JP2010223649A - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP2010223649A JP2010223649A JP2009069378A JP2009069378A JP2010223649A JP 2010223649 A JP2010223649 A JP 2010223649A JP 2009069378 A JP2009069378 A JP 2009069378A JP 2009069378 A JP2009069378 A JP 2009069378A JP 2010223649 A JP2010223649 A JP 2010223649A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- input
- sum
- radar apparatus
- switch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Abstract
【課題】受信部の構成をシンプルにして位相モノパルス方式により位相の測定を高精度に行えるレーダ装置を提供する。
【解決手段】レーダ装置100は、受信系として、2つの受信アンテナ121、122と、受信アンテナ121、122から2つの受信信号を入力して両者を加算した和信号と両者の差である差信号を出力するハイブリッド回路123と、ハイブリッド回路123から和信号及び差信号を入力するスイッチ124と、スイッチ124から入力した和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部125とを備えている。2つの受信アンテナ121、122からの受信信号を、スイッチ124で切り替えることで1系列の受信部125で処理させるように構成している。
【選択図】図1
【解決手段】レーダ装置100は、受信系として、2つの受信アンテナ121、122と、受信アンテナ121、122から2つの受信信号を入力して両者を加算した和信号と両者の差である差信号を出力するハイブリッド回路123と、ハイブリッド回路123から和信号及び差信号を入力するスイッチ124と、スイッチ124から入力した和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部125とを備えている。2つの受信アンテナ121、122からの受信信号を、スイッチ124で切り替えることで1系列の受信部125で処理させるように構成している。
【選択図】図1
Description
本発明は、ターゲットを検知してその方位を位相モノパルス方式により検出するレーダ装置に関するものである。
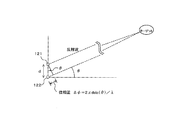
従来より、寸法が限定されたレーダ装置では、ターゲットの方位(角度)を検知するために位相モノパルス方式を用いるのが一般的である。図2に示すように、一つのターゲットで反射された反射波を2つの受信アンテナで受信すると、両者の間にはターゲットの方位によって形成される位相差が生じるが、位相モノパルス方式では、この位相差を用いてターゲットの方位を測定する。
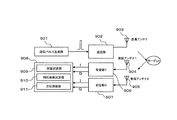
位相モノパルス方式を用いて測角を行う従来のレーダ装置の構成例を図6に示す。送信パルス生成部901で生成されたパルス信号が、送信部902で所定の周波数にアップコンバートされて送信アンテナ903に出力され、送信アンテナ903から送信波が空中に放射される。放射された送信波は、ターゲットで反射されて2つの受信アンテナ904、905で受信される。受信アンテナ904、905で受信された受信信号は、それぞれ受信部906、907に入力されてダウンコンバートされ、それぞれの受信部906、907から直交位相変換されたI信号とQ信号が演算部908に出力される。演算部908には、距離演算部909、相対速度演算部910、及び方位演算部911が設けられており、それぞれでターゲットまでの距離、相対速度、及び方位が算出される。
特許文献1には、複数本の受信アンテナと、それと同数の受信部を備える位相モノパルス式レーダについての記載がある。特許文献1に記載のレーダは、さらにカメラ装置を備える構成となっており、これを用いてターゲットが存在する方位角度領域を特定できるようにしている。これにより、位相の折り返しによるターゲットの方位を誤検出するのを防止している。
また特許文献2には、広帯域信号の到来方向を精度よく推定する方法についての記載がある。ここでは、2系統のアンテナを用い、それぞれのアンテナで受信した信号をハイブリッド回路に入力して和信号(Σ)と差信号(Δ)を作成している。ハイブリッド回路から出力される和信号(Σ)と差信号(Δ)を受信部に入力し、受信部からの出力を用いて広帯域信号の到来方向を推定している。信号の周波数帯域を分割し、分割された各帯域における|Δ/Σ|の落ち込む(極小である)方向が一致するとき、そのときの真正面方向(方位0°)が信号到来方向であると推定している。本方式も位相モノパルス方式の一つである。
位相モノパルス方式のレーダ装置では、反射波を受信するための受信アンテナが2系統以上設けられ、各受信アンテナで受信した受信信号を用いて位相モノパルス処理するために、少なくとも2系統の受信部を備えている。1系統あたりの受信部には、受信信号を増幅する増幅器、ダウンコンバートする装置、IQ復調方式によりI信号、Q信号を出力する装置、等が設けられている。そのため、このような受信系を複数備えるようにすると受信部の寸法が大きくなり、コストも高くなるといった問題があった。
また、2系統以上の受信アンテナで受信された信号が異なる受信部で処理されて演算部に出力されているため、受信アンテナで受信されてから演算部に到達するまでに要する受信処理時間が受信部によって異なる場合には、演算部で正しく同期をとって処理することができなくなるおそれがある。そのため、どの受信部で処理されても受信処理時間がほぼ一致するように、受信部内の線路長等を高精度に管理する必要があり、これもコスト増加の要因となっている。
本発明は、上記課題に鑑みてなされたものであり、受信部の構成をシンプルにして位相モノパルス方式により位相の測定を高精度に行えるレーダ装置を提供することを目的とする。
上記課題を解決するため、本発明のレーダ装置の第1の態様は、パルス信号を生成する送信パルス生成部と、前記送信パルス生成部から入力した前記パルス信号を所定の周波数帯にアップコンバートして高周波パルス信号を出力する送信部と、前記送信部から前記高周波パルス信号を入力して送信波を放射する1つの送信アンテナと、前記送信アンテナから放射された前記送信波がターゲットで反射されて戻ってきた反射波を受信して2つの受信信号を出力する2以上の受信アンテナと、前記2以上の受信アンテナから入力した前記2つの受信信号を加算した和信号及び前記2つの受信信号の一方から他方を減算した差信号を出力するハイブリッド回路と、前記ハイブリッド回路から前記和信号を入力する第1の入力端と、前記差信号を入力する第2の入力端と、所定の選択信号に従って前記第1の入力端または前記第2の入力端に接続されて前記和信号または前記差信号を出力する出力端とを有するスイッチと、前記スイッチから入力した前記和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部と、前記受信部から前記I信号及びQ信号を入力し、前記I信号及びQ信号のドップラーシフトによる周波数のずれから前記ターゲットの相対速度を算出するとともに、前記和信号と前記差信号との比を算出して前記ターゲットの方位を算出するする演算部と、を備えることを特徴とする。
上記構成の本発明では、2以上の受信アンテナをスイッチを介して1系統の受信部に接続することで、受信部の構成をシンプルにして位相モノパルス方式により位相の測定を高精度に行うことが可能となる。
本発明のレーダ装置の他の態様は、前記スイッチは、前記第1の入力端と前記第2の入力端とを交互に前記出力端に接続することで、前記和信号と前記差信号とを交互に出力することを特徴とする。和信号と差信号とを交互に受信部に出力して受信処理を行わせることで、和信号と差信号との間の時間的なずれを小さくすることができる。
本発明のレーダ装置の他の態様は、前記スイッチは、前記第1の入力端と前記第2の入力端との切り替えを所定の時間間隔δtで周期的に行うことを特徴とする。スイッチの切り替えを一定周期で行わせることで、送信アンテナからの送信波の放射に同期させることが容易となる。
本発明のレーダ装置の他の態様は、前記送信パルス生成部から前記パルス信号を入力すると、前記スイッチに前記選択信号を出力するスイッチ制御部を備えることを特徴とする。これにより、スイッチの切り替えを送信パルス生成部からのパルス信号の出力に同期させて行わせることができる。
本発明のレーダ装置の他の態様は、前記演算部は、前記受信部から入力した前記和信号または前記差信号のI信号及びQ信号と、前記受信部から前回入力した前記差信号または前記和信号のI信号及びQ信号に対し前記時間間隔δtの間に変化する変化量を補正した補正後のI信号及びQ信号と、を用いて前記方位を算出することを特徴とする。これにより、比の算出に用いる和信号と差信号とを同時刻のものにすることができる。
本発明のレーダ装置の他の態様は、前記補正後のI信号及びQ信号は、前記ドップラーシフトによる前記時間間隔δtの間の位相の変化を前回入力した前記差信号または前記和信号のI信号及びQ信号に対して補正して算出されることを特徴とする。ドップラーシフトによる位相の変化を用いて時間間隔δtの間の差信号または和信号の変化を補正することができる。
本発明のレーダ装置の他の態様は、前記演算部は、前記和信号と前記差信号との比の虚数部を算出して前記ターゲットの方位を算出することを特徴とする。受信アンテナの特性に応じて、和信号と差信号との比の虚数部を用いて方位を算出することができる。
本発明のレーダ装置の他の態様は、前記演算部は、前記和信号と前記差信号との比の実数部を算出して前記ターゲットの方位を算出することを特徴とする。受信アンテナの特性に応じて、和信号と差信号との比の実数部を用いて方位を算出することができる。
本発明によれば、2以上の受信アンテナをスイッチを介して1系統の受信部に接続することで、受信部の構成をシンプルにして位相モノパルス方式により位相の測定を高精度に行えるレーダ装置を提供することが可能となる。
本発明の好ましい実施の形態におけるレーダ装置について、図面を参照して詳細に説明する。同一機能を有する各構成部については、図示及び説明簡略化のため、同一符号を付して示す。
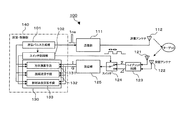
本発明の第1の実施形態に係るレーダ装置の構成を、図1を用いて説明する。図1は、本実施形態のレーダ装置100の構成を示すブロック図である。本実施形態のレーダ装置100は、送信系として、パルス信号を生成する送信パルス生成部101と、送信パルス生成部101から入力したパルス信号を所定の周波数帯にアップコンバートして高周波パルス信号を出力する送信部111と、送信部111から高周波パルス信号を入力して送信波を放射する送信アンテナ112と、を備えている。レーダ装置100の送信系として、例えば送信パルス生成部101からパルス幅1ns程度の広帯域ベースバンドのパルス信号を発出させ、これを送信部111で26.5GHz程度にアップコンバートして送信アンテナ112から放射させるように構成することができる。
また受信系として、送信アンテナ112から放射された送信波がターゲットで反射されて戻ってきた反射波を受信する2つの受信アンテナ121、122と、受信アンテナ121、122から2つの受信信号を入力して両者を加算した和信号(Σ)と両者の差である差信号(Δ)を出力するハイブリッド回路123と、ハイブリッド回路123から和信号を入力する第1の入力端124aと、差信号を入力する第2の入力端124bと、和信号と差信号のいずれかを選択してを出力する出力端124cとを有するスイッチ124と、スイッチ124から入力した和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部125と、受信部125からI信号及びQ信号を入力してターゲットの相対速度及び方位を演算する演算部130と、を備えている。
レーダ装置100は、位相モノパルス方式でターゲットの方位を測定できるように構成されている。すなわち、送信系が1系統で構成されて1つの送信アンテナ112を備えているのに対し、受信系は所定距離dだけ離れて配置された2つの受信アンテナ121、122を備えている。受信アンテナ121、122で受信されて出力される2つの受信信号は、ハイブリッド回路123に入力されて和信号と差信号の2つの信号に変換されて出力される。このように、本実施形態のレーダ装置100でも、2つの受信アンテナ121、122を用いて2つの受信信号(和信号、差信号)が出力されるように構成されている。しかし、線路長等の管理が複雑な受信部125については、これを1系統のみを備えるようにしている。これにより、レーダ装置100の小型化や低価格化が容易となる。
位相モノパルス方式で必要となる2つの受信信号に対し、これを1系統の受信部125で信号処理するために、レーダ装置100ではスイッチ124を備える構成としており、スイッチ124で2つの受信信号を交互に選択し、ここで選択された受信信号を受信部125に出力して信号処理させる構成としている。スイッチ124は、和信号と差信号の2つの受信信号を出力するハイブリッド回路123の出力側に接続されており、スイッチ124で和信号と差信号の2つの受信信号のいずれか1つを選択し、これを出力端124cに接続された受信部125に出力する構成としている。
スイッチ124により和信号と差信号のいずれか一方を交互に選択させるために、スイッチ制御部102を設けてスイッチ124を制御させている。スイッチ制御部102は、送信パルス生成部101からパルス信号を入力し、これをトリガーとしてスイッチ124の入力端124a、124bを交互に切り替えて出力端124cに接続させている。送信パルス生成部101から出力されるパルス信号をトリガーとして、スイッチ124の切り替えを行わせることで、送信アンテナ112から放射された送信波に対して、その反射波を受信した受信信号を受信部125で確実に処理させることができる。
受信部125から演算部130に出力されたI信号、Q信号を用いて、演算部130では、ターゲットの位置情報を算出する。レーダ装置100では、位相モノパルス方式を用いてターゲットの方位を測定するために、演算部130に方位演算手段131を備えている。また、ターゲットまでの距離を算出するための距離演算手段132、及びターゲットの相対速度を算出するための相対速度演算手段133を演算部130に備えるようにしており、ターゲットの位置情報としてターゲットまでの距離、ターゲットの存在する方位、及びターゲットの相対速度を提供することができる。
本実施形態のレーダ装置100では、方位演算手段131、距離演算手段132、及び相対速度演算手段133を有する演算部130は、デジタル演算装置である演算・制御部140に設けられている。また、送信部111とスイッチ制御部102にパルス信号を送出する送信パルス生成部101、及びスイッチ124を制御しているスイッチ制御部102も、ともに演算・制御部140に設けられている。
本実施形態のレーダ装置100では、受信信号の和信号と差信号をスイッチ124で切り替えて受信部125で交互に処理する構成としていることから、演算部130に入力される和信号のI信号、Q信号と、差信号のI信号、Q信号との間にタイムラグδtが存在する。このタイムラグδtは、スイッチ124の切り替え周期、すなわち送信パルス生成部101からパルス信号が出力される周期に等しい。レーダ装置100及びターゲットが静止している場合には、このようなタイムラグがあってもターゲットの位置情報は変化せず問題はない。
しかし、レーダ装置100とターゲットの少なくとも一方が移動している場合には、このタイムラグδtの間にターゲットまでの距離や方位が変化してしまう。ターゲットまでの距離については、和信号と差信号のうちいずれか一方の最新の信号だけを用いて算出することができる。これに対し、方位の算出には和信号と差信号の両方を用いる必要があることから、上記のタイムラグδt及び相対速度の大きさによっては、方位の測定精度が低下するおそれがある。
そこで、本実施形態のレーダ装置100では、上記のようなタイムラグδtによる和信号と差信号との間のずれを補正してターゲットの方位を算出するようにしており、これによりタイムラグδtや相対速度がある程度大きい場合でも、ターゲットの方位を高精度に算出できるようにしている。レーダ装置100とターゲットの少なくとも一方が移動している場合には、受信信号にドップラー効果による周波数シフトが生じている。演算部130の相対速度演算手段133では、受信部125から入力したI信号、Q信号をFFT(Fast Fourier Transform)処理してドップラー効果による周波数のずれfdを演算しており、これから相対速度を算出している。方位演算手段131では、相対速度演算手段133で算出された周波数のずれfdを用いてターゲットの方位を補正している。本実施形態のレーダ装置100では、タイムラグδtを10ms程度することができる。また、ドップラー効果による周波数のずれfdは、±6kHz以内の低い周波数(長い周期)となる。
以下では、本実施形態のレーダ装置100で行う方位算出のための補正方法について説明する。ここでは、時刻T−δtに測定された和信号と、δt後の時刻Tに測定された差信号を用いてターゲットの方位を算出するものとする。この場合、和信号に対してタイムラグδtの間の変化を推定して補正する必要がある。なお、時刻T−δtに測定した差信号とδt後の時刻Tに測定した和信号を用いて方位を算出するようにしてもよく、その場合には差信号に対してタイムラグδtの間の変化を推定して補正する。これにより、同一時刻における和信号と差信号を用いてターゲットの方位を算出することが可能となる。
距離dだけ離れて配置された2つの受信アンテナ121、122が、方位θの方向にあるターゲットで反射された反射波を受信するとき、2つの受信アンテナ121、122で受信された2つの電波間の位相差φは、図2に示すように、次式で与えられる。

ここで、λは送信波の波長である。
受信部125から演算部130に入力されるI信号、Q信号を用いて、時刻tにおける和信号Σ(t)及び差信号Δ(t)は、それぞれ以下のように複素表現できる。
演算部130は、受信部125から時刻T−δtにおけるIΣ(T−δt)、QΣ(T−δt)と、時刻TにおけるIΔ(T)、QΔ(T)を入力する。これより、演算部130は和信号Σ(T−δt)と差信号Δ(T)を有している。和信号Σ(T−δt)と差信号Δ(T)の関係を図3に示す。図3は、和信号Σ(T−δt)と差信号Δ(T)の一例を複素平面上に示したものであり、同図には時刻Tにおける和信号Σ(T)との関係も併せて示している。
図3に示すように、時刻Tの時点では、和信号Σ(T)の位相ψ Σ(T)は、演算部130が有している時刻T−δtにおける和信号Σ(T−δt)の位相ψΣ(T−δt)よりもδψだけ進んでいる。そこで、方位を高精度に算出するために、演算部130ではタイムラグδtの間に進む和信号Σの位相変化δψを算出し、これを用いて和信号Σ(T−δt)を補正することで、時刻Tにおける和信号Σ(T)を算出している。位相変化δψは、次式で算出することができる。
ここで、td(=1/fd)はドップラー周期、fdはドップラー周波数である。
時刻Tにおける補正後の和信号Σ(T)=IΣ(T)+jQΣ(T)は、時刻T−δtにおいて測定された和信号Σ(T−δt)=IΣ(T−δt)+jQΣ(T−δt)に対し位相をδψだけ進めることで求めることができ、回転行列を用いて以下のように算出することができる。
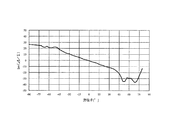
演算部130が有している時刻T−δtにおける和信号Σ(T−δt)を上式を用いて補正することで時刻Tにおける和信号Σ(T)を算出し、これと受信部125から入力した時刻Tにおける差信号Δ(T)とから方位を算出することができる。すなわち、Δ(T)/Σ(T)の虚数部Im(Δ(T)/Σ(T))を求め、あらかじめ方位θと虚数部Im(Δ/Σ)との関係をテーブル形式等で保存しているものを参照することで、時刻Tにおけるターゲットの方位θを算出することができる。
方位θに対する和信号と差信号との比(Δ/Σ)の虚数部の変化の一例を図4に示す。図4に示すような方位θと(Δ/Σ)の虚数部との関係をあらかじめ測定しておき、これをテーブル形式等にして演算部130内のメモリ等に保存しておく。方位演算手段131は、メモリ等から方位θと(Δ/Σ)の虚数部との関係を表したテーブル等を読み出し、これを用いて上記のようにしてターゲットの方位θを算出することができる。
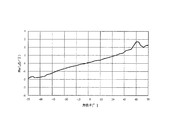
なお、上記では方位θと(Δ/Σ)の虚数部との関係を用いて方位を算出する方法について説明したが、受信アンテナ121,122の特性によっては、方位θと(Δ/Σ)の実数部との関係を用いた方が方位を検出しやすい場合がある。その場合には、あらかじめ方位θと(Δ/Σ)の実数部との関係を測定しておき、これをテーブル形式等にして演算部130内のメモリ等に保存しておく。そして、方位演算手段131でも、受信部125から入力した和信号と差信号を用い、上記のように補正した上で両者の比の実数部を算出する。この実数部をメモリ等に保存されているテーブル等を参照して方位θを算出することができる。方位θと(Δ/Σ)の実数部との関係の一例を図5に示す。
上記の実施形態を用いて説明したように、本発明のレーダ装置によれば、1系統の受信部を用いて位相モノパルス方式による方位の測定が可能となり、レーダ装置の小型化及び低価格化を図ることが可能となる。また、受信部が2系統以上ある場合に問題となった受信部間の線路長等の管理が不要となり、取り扱いが容易なレーダ装置を提供することが可能となる。
なお、本実施の形態における記述は、本発明に係るレーダ装置の一例を示すものであり、これに限定されるものではない。本実施の形態におけるレーダ装置の細部構成及び詳細な動作などに関しては、本発明の趣旨を逸脱しない範囲で適宜変更可能である。
100 レーダ装置
101 送信パルス生成部
102 スイッチ制御部
111 送信部
112 送信アンテナ
121、122 受信アンテナ
123 ハイブリッド回路
124 スイッチ
124a、124b 入力端
124c 出力端
125 受信部
130 演算部
131 方位演算手段
132 距離演算手段
133 相対速度演算手段
140 演算・制御部
101 送信パルス生成部
102 スイッチ制御部
111 送信部
112 送信アンテナ
121、122 受信アンテナ
123 ハイブリッド回路
124 スイッチ
124a、124b 入力端
124c 出力端
125 受信部
130 演算部
131 方位演算手段
132 距離演算手段
133 相対速度演算手段
140 演算・制御部
Claims (8)
- パルス信号を生成する送信パルス生成部と、
前記送信パルス生成部から入力した前記パルス信号を所定の周波数帯にアップコンバートして高周波パルス信号を出力する送信部と、
前記送信部から前記高周波パルス信号を入力して送信波を放射する1つの送信アンテナと、
前記送信アンテナから放射された前記送信波がターゲットで反射されて戻ってきた反射波を受信して2つの受信信号を出力する2以上の受信アンテナと、
前記2以上の受信アンテナから入力した前記2つの受信信号を加算した和信号及び前記2つの受信信号の一方から他方を減算した差信号を出力するハイブリッド回路と、
前記ハイブリッド回路から前記和信号を入力する第1の入力端と、前記差信号を入力する第2の入力端と、所定の選択信号に従って前記第1の入力端または前記第2の入力端に接続されて前記和信号または前記差信号を出力する出力端とを有するスイッチと、
前記スイッチから入力した前記和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部と、
前記受信部から前記I信号及びQ信号を入力し、前記I信号及びQ信号のドップラーシフトによる周波数のずれから前記ターゲットの相対速度を算出するとともに、前記和信号と前記差信号との比を算出して前記ターゲットの方位を算出するする演算部と、を備える
ことを特徴とするレーダ装置。 - 前記スイッチは、前記第1の入力端と前記第2の入力端とを交互に前記出力端に接続することで、前記和信号と前記差信号とを交互に出力する
ことを特徴とする請求項1に記載のレーダ装置。 - 前記スイッチは、前記第1の入力端と前記第2の入力端との切り替えを所定の時間間隔δtで周期的に行う
ことを特徴とする請求項1または2に記載のレーダ装置。 - 前記送信パルス生成部から前記パルス信号を入力すると、前記スイッチに前記選択信号を出力するスイッチ制御部を備える
ことを特徴とする請求項1乃至3のいずれか1項に記載のレーダ装置。 - 前記演算部は、前記受信部から入力した前記和信号または前記差信号のI信号及びQ信号と、前記受信部から前回入力した前記差信号または前記和信号のI信号及びQ信号が前記時間間隔δtの間に変化する変化量を補正した補正後のI信号及びQ信号と、を用いて前記方位を算出する
ことを特徴とする請求項3のまたは4に記載のレーダ装置。 - 前記補正後のI信号及びQ信号は、前記ドップラーシフトによる前記時間間隔δtの間の位相の変化を前回入力した前記差信号または前記和信号のI信号及びQ信号に対して補正して算出される
ことを特徴とする請求項5に記載のレーダ装置。 - 前記演算部は、前記和信号と前記差信号との比の虚数部を算出して前記ターゲットの方位を算出する
ことを特徴とする請求項1乃至6のいずれか1項に記載のレーダ装置。 - 前記演算部は、前記和信号と前記差信号との比の実数部を算出して前記ターゲットの方位を算出する
ことを特徴とする請求項1乃至6のいずれか1項に記載のレーダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009069378A JP2010223649A (ja) | 2009-03-23 | 2009-03-23 | レーダ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009069378A JP2010223649A (ja) | 2009-03-23 | 2009-03-23 | レーダ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010223649A true JP2010223649A (ja) | 2010-10-07 |
Family
ID=43041006
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009069378A Pending JP2010223649A (ja) | 2009-03-23 | 2009-03-23 | レーダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010223649A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3236278A1 (en) * | 2016-04-20 | 2017-10-25 | Rohde & Schwarz GmbH & Co. KG | Directional antenna module |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11160423A (ja) * | 1997-11-28 | 1999-06-18 | Toyota Motor Corp | レーダ装置 |
| JP2007155411A (ja) * | 2005-12-01 | 2007-06-21 | Tdk Corp | レーダー装置及び高周波モジュール |
-
2009
- 2009-03-23 JP JP2009069378A patent/JP2010223649A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11160423A (ja) * | 1997-11-28 | 1999-06-18 | Toyota Motor Corp | レーダ装置 |
| JP2007155411A (ja) * | 2005-12-01 | 2007-06-21 | Tdk Corp | レーダー装置及び高周波モジュール |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3236278A1 (en) * | 2016-04-20 | 2017-10-25 | Rohde & Schwarz GmbH & Co. KG | Directional antenna module |
| US20170310003A1 (en) * | 2016-04-20 | 2017-10-26 | Rohde & Schwarz Gmbh & Co. Kg | Directional antenna module and method |
| KR20170120032A (ko) * | 2016-04-20 | 2017-10-30 | 로오데운트쉬바르츠게엠베하운트콤파니카게 | 지향성 안테나 모듈 |
| CN107305245A (zh) * | 2016-04-20 | 2017-10-31 | 罗德施瓦兹两合股份有限公司 | 定向天线模块 |
| US10790584B2 (en) | 2016-04-20 | 2020-09-29 | Rohde & Schwarz Gmbh & Co. Kg | Directional antenna module and method |
| KR102289873B1 (ko) * | 2016-04-20 | 2021-08-13 | 로오데운트쉬바르츠게엠베하운트콤파니카게 | 지향성 안테나 모듈 |
| CN107305245B (zh) * | 2016-04-20 | 2023-12-22 | 罗德施瓦兹两合股份有限公司 | 定向天线模块 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5639150B2 (ja) | パルスレーダ装置及びその制御方法 | |
| JP4602267B2 (ja) | 電子走査式レーダ装置 | |
| US10557933B2 (en) | Radar device and position-determination method | |
| JP4737165B2 (ja) | レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 | |
| US9234956B2 (en) | Radar device | |
| US9470784B2 (en) | Radar device | |
| WO2019054504A1 (ja) | レーダ装置 | |
| JP6947054B2 (ja) | レーダ装置 | |
| JP2009080024A (ja) | 探知測距装置および探知測距方法 | |
| JP2009145206A5 (ja) | ||
| JP2007232385A (ja) | 電子走査式レーダ装置 | |
| US11885905B2 (en) | Radar apparatus and method for determining range side lobe | |
| JP6088492B2 (ja) | パルス信号設定装置、レーダ装置、パルス信号設定方法及びパルス信号設定プログラム | |
| JP2009025158A (ja) | レーダ装置 | |
| JP4082442B2 (ja) | 方位検出装置 | |
| JP2008122137A (ja) | レーダ装置 | |
| JP3829659B2 (ja) | レーダ装置 | |
| JP2010060459A (ja) | モノパルスレーダ装置 | |
| JP2014006072A (ja) | レーダ装置、目標データ取得方法及び、目標追尾システム | |
| JP2009270863A (ja) | バイスタティックレーダ装置 | |
| JP2010223649A (ja) | レーダ装置 | |
| JP2006329829A (ja) | レーダ装置 | |
| JP5611294B2 (ja) | 探知測距装置 | |
| JP2012194064A (ja) | ホログラフィックレーダ装置 | |
| JP2001116834A (ja) | レーダ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130405 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130726 |