JP2010096765A - 直角位相制御を備えた振動構造ジャイロスコープ - Google Patents
直角位相制御を備えた振動構造ジャイロスコープ Download PDFInfo
- Publication number
- JP2010096765A JP2010096765A JP2009237361A JP2009237361A JP2010096765A JP 2010096765 A JP2010096765 A JP 2010096765A JP 2009237361 A JP2009237361 A JP 2009237361A JP 2009237361 A JP2009237361 A JP 2009237361A JP 2010096765 A JP2010096765 A JP 2010096765A
- Authority
- JP
- Japan
- Prior art keywords
- drive
- signal
- driving
- quadrature
- resonator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 claims abstract description 42
- 230000010355 oscillation Effects 0.000 claims description 40
- 239000002131 composite material Substances 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 6
- 230000003534 oscillatory effect Effects 0.000 claims description 5
- 230000003187 abdominal effect Effects 0.000 claims 9
- 230000001066 destructive effect Effects 0.000 abstract description 4
- 230000000694 effects Effects 0.000 abstract description 2
- 238000001514 detection method Methods 0.000 description 12
- 230000014509 gene expression Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 210000001015 abdomen Anatomy 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000015556 catabolic process Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000006731 degradation reaction Methods 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical group [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000002688 persistence Effects 0.000 description 1
- 238000004321 preservation Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/567—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using the phase shift of a vibration node or antinode
- G01C19/5691—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using the phase shift of a vibration node or antinode of essentially three-dimensional vibrators, e.g. wine glass-type vibrators
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Gyroscopes (AREA)
Abstract
【解決手段】1つ以上の駆動素子の駆動信号に他の駆動素子に対する位相オフセットを導入し、直角位相信号を最小化又は低減することによって補正を行う。同調は、ユーザの裁量で実行される手動調整として、閉ループ能動補正システムとして、又は1回限りの「設定後操作不要な」調整として行うことができる。本手法では、単に誤同調を補償するのではなく、共振器組立体の同調を改善する。それによって、本発明の様々な実施形態では、複数の駆動軸間の有害な干渉が低減される。従って、共振器に存在する振動エネルギの保存が強化され、支持構造へ伝達される振動エネルギが減少する。
【選択図】図6
Description
ける位相オフセットに影響を及ぼすDCバイアス電圧として印加される。特許文献6及び特許文献7によって開示された方法には、感応を大きくするために、駆動電極の他に少なくとも1つの追加電極が必要である。
も、不均一性に寄与し得る。更に、共振器組立体のインターフェイスとなる様々な付属物(例えば、配線、接点)及び組立品を結合する付属物(例えば、素子用の半田や接着材)も、素子間において様々な質量のものであり、これによって、共振器組立体に更なる不均一性を導入し得る。更に、共振器組立体に存在する(過渡的又は定常状態の)温度勾配は、更なる不均一性をもたらし得る。従って、共振器組立体の任意の部位が、共振器の対応部位及び/又は共振器全体と異なる共振周波数を有し得る。
御するための命令を含む。この命令は、第1駆動信号に基づき第1駆動軸に沿って共振器組立体を駆動することと、第2駆動信号に基づき第2駆動軸に沿って共振器組立体を駆動することと、共振器組立体が第1駆動軸及び第2駆動軸に沿って駆動されているときに、回転速度信号を測定することと、回転速度信号から直角位相信号を推定することと、直角位相信号が所望レベルで維持されるように、第1駆動信号と第2駆動信号との間に合成位相オフセットを与えることと、を含む。所望レベルは、最小の大きさであってよい。
、及び8、並びに付随の議論を参照)。
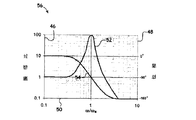
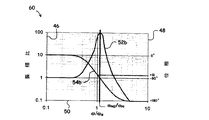
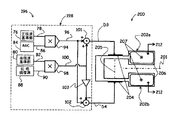
ωN2のほぼ平均であり得る。位相関数54a及び54bは、互いに対して、大きさが2αの合成位相オフセット64を有すると言うことができ、ここで、90°の位相遅れは、2α間隔(図5)の中間に任意に選択される。

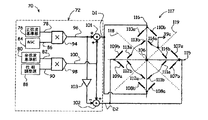
数に次のように関係し得る。即ち、駆動信号Kの振幅は、AGC84によって影響され得る。位相オフセットαは、直角位相調整源88によって影響され得る。SIN(ωt)関数は、正弦波基準部76によって影響され得る。また、COS(ωt)関数は、余弦波基準部80によって影響され得る。
四叉分岐共振器組立体104には、4つの駆動素子対107,108,109、及び110と、4つの検知素子対111,112,113、及び114と、が含まれる。図7における各対の各部材は、「a」及び「b」指定(例えば、108a及び108b)によって識別する。図7の斜視図の後側に配置された要素は、想像線で示す。駆動素子は、それぞれの叉の角部で対になり(例えば、叉105bの外側の角部における駆動素子108a及び108b)、他方、検知素子は、四叉分岐共振器組立体104の同一面上で対になる(例えば、叉105b及び105cによって定義される四叉分岐共振器組立体104の面上の検知素子112a及び112b)ことに留意されたい。駆動素子対107,108,109、及び110は、実質的に中心軸106に垂直な第1面に中心を置く。同様に、検知素子対111,112,113、及び114は、実質的に中心軸106に垂直な(即ち、第1面に平行な)第2面に中心を置く。
105a、105b、105c、及び105dに沿って、駆動素子対107,108,109、及び110の位置に対して軸方向に離される。図7及び7Aに示す検知素子対111,112,113、及び114は、駆動発振の成分を各々検出するが、逆位相であり、検知素子対の各素子を加算すると、駆動成分が相殺される。
ることに留意されたい。即ち、
Claims (26)
- 振動構造ジャイロスコープの直角位相を制御するための方法であって、
共振器組立体を提供する工程と、前記共振器組立体は、軸対称共振器と、前記共振器に連結され、前記軸対称共振器における共振発振パターンを持続させるための複数の駆動素子と、前記軸対称共振器に連結されており、回転速度を検出するための1つ以上の検知素子と、を備えることと、前記複数の駆動素子のうちの第1駆動素子は第1駆動軸に沿って駆動され、前記複数の駆動素子のうちの第2駆動素子は第2駆動軸に沿って駆動されることと、
第1駆動信号に基づき、前記駆動素子のうちの第1駆動素子により、第1駆動軸に沿って前記共振器組立体を駆動する工程と、
第2駆動信号に基づき、前記駆動素子のうちの第2駆動素子により、第2駆動軸に沿って前記共振器組立体を駆動する工程と、
前記共振器組立体が第1駆動軸及び第2駆動軸に沿って駆動されているときに回転速度信号を測定する工程と、
前記回転速度信号から直角位相信号を推定する工程と、
前記直角位相信号が所望レベルで維持されるように、第1駆動信号と第2駆動信号との間に合成位相オフセットを与える工程と、からなる方法。 - 合成位相オフセットを与える工程は、前記直角位相信号が最小の大きさで維持されるように実行される請求項1に記載の方法。
- 第1駆動信号と第2駆動信号との間に合成位相オフセットを与える工程は、第1駆動信号に対し第1位相オフセットを与え、第2駆動信号に対し第1位相オフセットと逆で第1位相オフセットにほぼ等しい第2位相オフセットを与える工程を含む請求項1に記載の方法。
- 共振器組立体の駆動発振を検知するための1つ以上の駆動センサを提供する工程と、
前記1つ以上の駆動センサに連結された入力部と、前記複数の駆動素子のうちの第1駆動素子及び第2駆動素子に連結された出力部とを有する、位相同期ループ駆動系を提供する工程と、
前記位相同期ループ駆動系に第1駆動信号及び第2駆動信号を出力させる工程と、第1駆動信号及び第2駆動信号は前記駆動発振の周波数にほぼ一致する周波数を有することと、を含む請求項1に記載の方法。 - 前記提供する工程において提供される前記1つ以上の検知素子は、共振器組立体の駆動発振を検知するように構成されており、前記方法は、
前記1つ以上の駆動センサに連結された入力部と、前記複数の駆動素子のうちの第1駆動素子及び第2駆動素子に連結された出力部とを有する、位相同期ループ駆動系を提供する工程と、
前記位相同期ループ駆動系に第1駆動信号及び第2駆動信号を出力させる工程と、第1駆動信号及び第2駆動信号は前記駆動発振の周波数にほぼ一致する周波数を有することと、を含む請求項1に記載の方法。 - 前記提供する工程において提供される前記共振器組立体の前記駆動素子は、前記共振器組立体の回転が停止しているとき、前記共振発振パターンを持続させ、複数の基準軸を定義する複数の腹対を含むように構成されており、前記腹対の各々は中心軸について全く反対に位置し、前記複数の基準軸の各々は前記複数の腹対のうちの対応する腹対を貫通していることと、
前記提供する工程において提供される前記共振器組立体の第1駆動軸は、前記複数の基
準軸のうちの第1基準軸に対し第1回転オフセットだけ離れており、第1駆動軸は前記複数の基準軸のいずれとも一致しないことと、
前記提供する工程において提供される前記共振器組立体の第2駆動軸は、前記複数の基準軸のうちの第2基準軸に対し第1回転オフセットとは反対の方向に第2回転オフセットだけ離れており、第2駆動軸は前記複数の基準軸のいずれとも一致しないことと、を含む請求項1に記載の方法。 - 前記駆動する工程において駆動される第1駆動軸及び第2駆動軸は互いから離れている請求項1に記載の方法。
- 前記駆動する工程において駆動される第1駆動軸及び第2駆動軸はほぼ一致している請求項1に記載の方法。
- 前記直角位相信号から位相復調誤差を推定する工程を含む請求項1に記載の方法。
- 直角位相制御式振動構造ジャイロスコープであって、
共振器組立体と、前記共振器組立体は、
中心軸を定義する軸対称共振器と、
前記共振器に連結された複数の駆動素子と、前記複数の駆動素子のうちの第1駆動素子は第1駆動軸に沿って駆動され、前記複数の駆動素子のうちの第2駆動素子は第2駆動軸に沿って駆動されることと、
前記軸対称共振器に連結されており、回転速度信号を検出するための1つ以上の検知素子と、を備えることと、
前記複数の駆動素子に連結されており、前記軸対称共振器において共振発振パターンを持続させ、前記回転速度信号から直角位相成分を推定するとともに、前記直角位相成分の大きさを制御するために第1駆動素子と第2駆動素子との間の合成位相オフセットを制御するための制御系と、からなる直角位相制御式振動構造ジャイロスコープ。 - 第2駆動軸は第1駆動軸と一致している請求項10に記載の直角位相制御式振動構造ジャイロスコープ。
- 第2駆動軸は回転方向に第1駆動軸から離れている請求項10に記載の直角位相制御式振動構造ジャイロスコープ。
- 前記制御系及び前記駆動素子は、前記共振器組立体の回転が停止しているとき、前記発振パターンを持続させ、複数の基準軸を定義する複数の腹対を含むように構成されており、前記腹対の各々は中心軸について全く反対に位置し、前記複数の基準軸の各々は前記複数の腹対のうちの対応する腹対を貫通していることと、
第1駆動軸は前記複数の基準軸のうちの第1基準軸に対し第1回転オフセットだけ離れており、第1駆動軸は前記複数の基準軸のいずれとも一致しないことと、
第2駆動軸は、前記複数の基準軸のうちの第2基準軸に対し第1の回転オフセットとは反対の方向に第2回転オフセットだけ離れており、第2駆動軸は前記複数の基準軸のいずれとも一致しないことと、を含む請求項11に記載の直角位相制御式振動構造ジャイロスコープ。 - 前記制御系は、前記1つ以上の検知素子に連結されており、前記直角位相信号をフィードバック信号として利用する閉ループ制御系である請求項10に記載の直角位相制御式振動構造ジャイロスコープ。
- 第1駆動素子は次式によって定義される第1駆動信号によって駆動され、
- 前記制御系は、更に、
前記駆動信号の振幅を提供するための自動利得制御部と、
前記位相オフセットを提供するための直角位相調整源と、
SIN(ωt)関数を提供するための正弦波基準部と、
COS(ωt)関数を提供するための余弦波基準部と、を備える請求項15に記載の直角位相制御式振動構造ジャイロスコープ。 - 第1駆動素子は次式によって定義される第1駆動信号によって駆動され、
- 前記制御系は、更に、
前記駆動信号の振幅を提供するための自動利得制御部と、
前記位相オフセットを提供するための直角位相調整源と、
SIN(ωt)関数を提供するための正弦波基準部と、
COS(ωt)関数を提供するための余弦波基準部と、を備える請求項17に記載の直角位相制御式振動構造ジャイロスコープ。 - 前記共振器組立体は、カップ共振器、半球形共振器、リング共振器、二叉分岐共振器、及び四叉分岐共振器から選択される共振器を含む請求項10に記載の直角位相制御式振動構造ジャイロスコープ。
- 直角位相制御式振動構造ジャイロスコープであって、
共振器組立体と、前記共振器組立体は、
軸対称共振器と、
前記共振器に連結され、前記軸対称共振器において共振発振パターンを持続させるための複数の駆動素子と、前記駆動素子のうちの第1駆動素子は第1駆動軸に沿って駆動され、前記複数の駆動素子のうちの第2駆動素子は第1の駆動軸から離れている第2駆動軸に沿って駆動されることと、
前記軸対称共振器に連結されており、回転速度を検出するための1つ以上の検知素子と、を備えることと、
前記軸対称共振器に連結された中央マイクロプロセッサと、
前記中央マイクロプロセッサに連結されており、前記直角位相制御式振動構造ジャイロスコープを制御するための命令を含むコンピュータ可読媒体と、からなり、前記命令は、
第1駆動信号に基づき第1駆動軸に沿って前記共振器組立体を駆動することと、
第2駆動信号に基づき第2駆動軸に沿って前記共振器組立体を駆動することと、
前記共振器組立体が第1及び第2駆動軸に沿って駆動されているときに回転速度信号を測定することと、
前記回転速度信号から直角位相信号を推定することと、
前記直角位相信号が所望レベルで維持されるように、第1駆動信号と第2駆動信号との間に合成位相オフセットを与えることと、を含む、直角位相制御式振動構造ジャイロスコープ。 - 第1駆動軸及び第2駆動軸はほぼ一致している請求項20に記載の直角位相制御式振動構造ジャイロスコープ。
- 第2駆動軸は回転方向に第1駆動軸から離れている請求項20に記載の直角位相制御式振動構造ジャイロスコープ。
- 前記制御系及び前記駆動素子は、前記共振器組立体の回転が停止しているとき、前記発振パターンを持続させ、複数の基準軸を定義する複数の腹対を含むように構成されており、前記腹対の各々は中心軸について全く反対に位置し、前記複数の基準軸の各々は前記複数の腹対のうちの対応する腹対を貫通していることと、
第1駆動軸は前記複数の基準軸のうちの第1基準軸に対し第1回転オフセットだけ離れており、第1駆動軸は前記複数の基準軸のいずれとも一致しないことと、
第2駆動軸は、前記複数の基準軸のうちの第2基準軸に対し第1の回転オフセットとは反対の方向に第2回転オフセットだけ離れており、第2駆動軸は前記複数の基準軸のいずれとも一致しないことと、を含む請求項22に記載の直角位相制御式振動構造ジャイロスコープ。 - 前記制御系は、前記1つ以上の検知素子に連結されており、前記直角位相信号をフィードバック信号として利用する閉ループ制御系である請求項20に記載の直角位相制御式振動構造ジャイロスコープ。
- 第1駆動素子は次式によって定義される第1駆動信号によって駆動され、
- 第1駆動素子は次式によって定義される第1駆動信号によって駆動され、
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10523608P | 2008-10-14 | 2008-10-14 | |
| US61/105,236 | 2008-10-14 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010096765A true JP2010096765A (ja) | 2010-04-30 |
| JP5517553B2 JP5517553B2 (ja) | 2014-06-11 |
Family
ID=41719131
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009237361A Active JP5517553B2 (ja) | 2008-10-14 | 2009-10-14 | 直角位相制御方法及びその方法を備えた振動構造ジャイロスコープ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8661898B2 (ja) |
| EP (1) | EP2177875A3 (ja) |
| JP (1) | JP5517553B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013527455A (ja) * | 2010-05-17 | 2013-06-27 | シリコン、センシング、システムズ、リミテッド | 直角位相除去を有する速度センサ |
| KR101298286B1 (ko) | 2011-11-30 | 2013-08-20 | 삼성전기주식회사 | 자이로센서 오프셋 자동 보정회로, 자이로센서 시스템 및 자이로센서 오프셋 자동 보정방법 |
| WO2015107704A1 (ja) * | 2014-01-14 | 2015-07-23 | 三菱電機株式会社 | 半球共振型ジャイロ |
| JP2015528899A (ja) * | 2012-06-29 | 2015-10-01 | 株式会社村田製作所 | 改良された振動ジャイロスコープ |
| KR20160086747A (ko) * | 2015-01-12 | 2016-07-20 | 더 보잉 컴파니 | 성능 개선을 위한 코리올리 진동식 자이로스코프(cvg)의 제어 재분산을 위한 접근법 |
| JP2020169819A (ja) * | 2019-04-01 | 2020-10-15 | 国立大学法人東北大学 | ジャイロ装置およびジャイロ装置の制御方法 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201003539D0 (en) | 2010-03-03 | 2010-04-21 | Silicon Sensing Systems Ltd | Sensor |
| WO2011113917A1 (de) | 2010-03-17 | 2011-09-22 | Continental Teves Ag & Co. Ohg | Verfahren zur entkoppelten regelung der quadratur und der resonanzfrequenz eines mikromechanischen drehratensensors mittels sigma-delta-modulation |
| WO2011113916A1 (de) * | 2010-03-17 | 2011-09-22 | Continental Teves Ag & Co. Ohg | Verfahren zur entkoppelten regelung der quadratur und der resonanzfrequenz eines mikromechanischen gyroskops |
| US9246018B2 (en) | 2010-09-18 | 2016-01-26 | Fairchild Semiconductor Corporation | Micromachined monolithic 3-axis gyroscope with single drive |
| KR20130057485A (ko) | 2010-09-18 | 2013-05-31 | 페어차일드 세미컨덕터 코포레이션 | 미세 전자 기계 시스템에 미치는 응력을 감소시키기 위한 패키징 |
| US10065851B2 (en) | 2010-09-20 | 2018-09-04 | Fairchild Semiconductor Corporation | Microelectromechanical pressure sensor including reference capacitor |
| KR20130098059A (ko) * | 2012-02-27 | 2013-09-04 | 삼성전기주식회사 | 관성센서 |
| EP2647952B1 (en) | 2012-04-05 | 2017-11-15 | Fairchild Semiconductor Corporation | Mems device automatic-gain control loop for mechanical amplitude drive |
| EP2647955B8 (en) | 2012-04-05 | 2018-12-19 | Fairchild Semiconductor Corporation | MEMS device quadrature phase shift cancellation |
| US9625272B2 (en) * | 2012-04-12 | 2017-04-18 | Fairchild Semiconductor Corporation | MEMS quadrature cancellation and signal demodulation |
| DE102013014881B4 (de) | 2012-09-12 | 2023-05-04 | Fairchild Semiconductor Corporation | Verbesserte Silizium-Durchkontaktierung mit einer Füllung aus mehreren Materialien |
| US9335170B2 (en) * | 2012-11-28 | 2016-05-10 | Freescale Semiconductor, Inc. | Inertial sensor and method of levitation effect compensation |
| US9644963B2 (en) | 2013-03-15 | 2017-05-09 | Fairchild Semiconductor Corporation | Apparatus and methods for PLL-based gyroscope gain control, quadrature cancellation and demodulation |
| US9605964B2 (en) * | 2014-01-03 | 2017-03-28 | The Boeing Company | Gyro quadrature stabalization with demodulation phase error nulling |
| US9869552B2 (en) * | 2015-03-20 | 2018-01-16 | Analog Devices, Inc. | Gyroscope that compensates for fluctuations in sensitivity |
| US10309782B2 (en) | 2015-04-07 | 2019-06-04 | Analog Devices, Inc. | Quality factor estimation for resonators |
| US11231441B2 (en) * | 2015-05-15 | 2022-01-25 | Invensense, Inc. | MEMS structure for offset minimization of out-of-plane sensing accelerometers |
| US10295558B2 (en) | 2015-05-15 | 2019-05-21 | Invensense, Inc. | Offset rejection electrodes |
| US9952252B2 (en) | 2015-05-15 | 2018-04-24 | Invensense, Inc. | Offset rejection electrodes |
| US10696541B2 (en) | 2016-05-26 | 2020-06-30 | Honeywell International Inc. | Systems and methods for bias suppression in a non-degenerate MEMS sensor |
| US10371521B2 (en) | 2016-05-26 | 2019-08-06 | Honeywell International Inc. | Systems and methods for a four-mass vibrating MEMS structure |
| EP3361216B1 (en) * | 2017-02-08 | 2021-04-28 | Murata Manufacturing Co., Ltd. | System and method for resonator amplitude control |
| US10578435B2 (en) | 2018-01-12 | 2020-03-03 | Analog Devices, Inc. | Quality factor compensation in microelectromechanical system (MEMS) gyroscopes |
| US11041722B2 (en) | 2018-07-23 | 2021-06-22 | Analog Devices, Inc. | Systems and methods for sensing angular motion in the presence of low-frequency noise |
| JP2023180506A (ja) * | 2022-06-09 | 2023-12-21 | 東京計器株式会社 | ジャイロコンパス |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001021362A (ja) * | 1999-07-12 | 2001-01-26 | Japan Aviation Electronics Industry Ltd | クローズドループ制御リング共振型振動ジャイロ |
| JP2007520716A (ja) * | 2004-02-04 | 2007-07-26 | ビ−エイイ− システムズ パブリック リミテッド カンパニ− | 振動構造ジャイロスコープにおけるバイアス誤差を低減する方法 |
| US20070240508A1 (en) * | 2006-04-18 | 2007-10-18 | Watson William S | Vibrating inertial rate sensor utilizing skewed drive or sense elements |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4951508A (en) | 1983-10-31 | 1990-08-28 | General Motors Corporation | Vibratory rotation sensor |
| CA1250458A (en) | 1983-10-31 | 1989-02-28 | Edward J. Loper, Jr. | Hemispherical resonator gyro |
| GB8716047D0 (en) * | 1987-07-08 | 1987-08-12 | Thorn Emi Electronics Ltd | Rate sensor |
| US5289258A (en) * | 1992-01-15 | 1994-02-22 | Honeywell Inc. | Fiber optic gyroscope modulation error reduction |
| GB2266149B (en) | 1992-04-10 | 1995-08-16 | British Aerospace | Single axis rate sensor noise reduction |
| GB2266588B (en) | 1992-04-24 | 1995-11-15 | British Aerospace | Vibrating rate sensor tuning |
| DE69308659T2 (de) | 1992-06-11 | 1997-10-02 | Sagem | Schwingstabgyroskop-Messvorrichtung mit Resonator |
| US5383362A (en) | 1993-02-01 | 1995-01-24 | General Motors Corporation | Control for vibratory gyroscope |
| US5428995A (en) | 1993-03-08 | 1995-07-04 | Litton Systems, Inc. | Counterbalanced vibratory triaxial angular rate sensor with open loop output |
| US5400269A (en) * | 1993-09-20 | 1995-03-21 | Rockwell International Corporation | Closed-loop baseband controller for a rebalance loop of a quartz angular rate sensor |
| US6003373A (en) * | 1995-06-07 | 1999-12-21 | Bei Sensors & Systems Company, Inc. | Closed loop resonant rotation rate sensor |
| US5796002A (en) * | 1995-06-07 | 1998-08-18 | Bei-Systron Donner | Rotation rate sensor with optical sensing device |
| US5850035A (en) * | 1995-06-07 | 1998-12-15 | Bei Sensors & Systems Company, Inc. | Closed loop resonant rotation rate sensor |
| US5992233A (en) * | 1996-05-31 | 1999-11-30 | The Regents Of The University Of California | Micromachined Z-axis vibratory rate gyroscope |
| US5801310A (en) | 1997-02-18 | 1998-09-01 | Litton Systems, Inc. | Vibratory rotation sensor with whole-angle tracking |
| JP3336451B2 (ja) | 1997-08-22 | 2002-10-21 | 富士通株式会社 | 音叉型振動ジャイロ |
| US6481285B1 (en) | 1999-04-21 | 2002-11-19 | Andrei M. Shkel | Micro-machined angle-measuring gyroscope |
| US7051590B1 (en) * | 1999-06-15 | 2006-05-30 | Analog Devices Imi, Inc. | Structure for attenuation or cancellation of quadrature error |
| GB0001294D0 (en) * | 2000-01-20 | 2000-03-08 | British Aerospace | Multi-axis sensing device |
| WO2001071364A1 (en) | 2000-03-17 | 2001-09-27 | Microsensors, Inc. | Method of canceling quadrature error in an angular rate sensor |
| DE10118650A1 (de) * | 2001-04-14 | 2002-10-17 | Philips Corp Intellectual Pty | Winkelsensor sowie Verfahren zum Erhöhen der Anisotropiefeldstärke einer Sensoreinheit eines Winkelsensors |
| US20030033850A1 (en) | 2001-08-09 | 2003-02-20 | Challoner A. Dorian | Cloverleaf microgyroscope with electrostatic alignment and tuning |
| US6675630B2 (en) | 2001-08-17 | 2004-01-13 | The Boeing Company | Microgyroscope with electronic alignment and tuning |
| US6854315B2 (en) | 2002-04-22 | 2005-02-15 | Northrop Grumman Corporation | Quadrature compensation technique for vibrating gyroscopes |
| US6915215B2 (en) | 2002-06-25 | 2005-07-05 | The Boeing Company | Integrated low power digital gyro control electronics |
| DE10248733B4 (de) | 2002-10-18 | 2004-10-28 | Litef Gmbh | Verfahren zur elektronischen Abstimmung der Ausleseschwingungsfrequenz eines Corioliskreisels |
| DE10248734B4 (de) | 2002-10-18 | 2004-10-28 | Litef Gmbh | Verfahren zur elektronischen Abstimmung der Ausleseschwingungsfrequenz eines Corioliskreisels |
| DE10248736B4 (de) | 2002-10-18 | 2005-02-03 | Litef Gmbh | Verfahren zur Ermittlung eines Nullpunktfehlers eines Corioliskreisels |
| US6906510B2 (en) * | 2002-11-18 | 2005-06-14 | Ronald J. Wolf | Quadrature output sensor system |
| GB0227098D0 (en) | 2002-11-20 | 2002-12-24 | Bae Systems Plc | Method of calibrating bias drift with temperature for a vibrating structure gyroscope |
| US6934660B2 (en) | 2003-02-20 | 2005-08-23 | The Regents Of The University Of California | Multi stage control architecture for error suppression in micromachined gyroscopes |
| DE10317159B4 (de) | 2003-04-14 | 2007-10-11 | Litef Gmbh | Verfahren zur Kompensation eines Nullpunktfehlers in einem Corioliskreisel |
| WO2005003684A1 (de) | 2003-07-04 | 2005-01-13 | Siemens Aktiengesellschaft | Verfahren zum abgleich eines drehratensensors |
| TWI220155B (en) | 2003-07-25 | 2004-08-11 | Ind Tech Res Inst | Micro vibratory dual-axis sensitive gyroscope |
| US6934665B2 (en) | 2003-10-22 | 2005-08-23 | Motorola, Inc. | Electronic sensor with signal conditioning |
| DE10360962B4 (de) | 2003-12-23 | 2007-05-31 | Litef Gmbh | Verfahren zur Quadraturbias-Kompensation in einem Corioliskreisel sowie dafür geeigneter Corioliskreisel |
| US7481109B2 (en) | 2005-03-04 | 2009-01-27 | Custom Sensors & Technologies, Inc. | Inertial measurement system and method with bias cancellation |
| US7318347B2 (en) | 2005-05-09 | 2008-01-15 | Northrop Grumman Corporation | Hemispherical resonator gyro control |
| US7411465B2 (en) | 2005-07-15 | 2008-08-12 | Watson Industries, Inc. | AGC circuit for the reduction of harmonics in the drive signal |
| US7886598B2 (en) | 2005-08-08 | 2011-02-15 | Northrop Grumman Guidance And Electronics Company, Inc. | Vibratory gyro bias error cancellation using mode reversal |
| US7565839B2 (en) | 2005-08-08 | 2009-07-28 | Northrop Grumman Guidance And Electronics Company, Inc. | Bias and quadrature reduction in class II coriolis vibratory gyros |
| US7290435B2 (en) | 2006-02-06 | 2007-11-06 | Invensense Inc. | Method and apparatus for electronic cancellation of quadrature error |
| US7617727B2 (en) * | 2006-04-18 | 2009-11-17 | Watson Industries, Inc. | Vibrating inertial rate sensor utilizing split or skewed operational elements |
| US7549334B2 (en) | 2006-04-24 | 2009-06-23 | Milli Sensor Systems + Actuators | Small angle bias measurement mechanism for MEMS instruments |
| US8096179B2 (en) * | 2009-04-09 | 2012-01-17 | Freescale Semiconductor, Inc. | Sensor device with reduced parasitic-induced error |
| US8151641B2 (en) * | 2009-05-21 | 2012-04-10 | Analog Devices, Inc. | Mode-matching apparatus and method for micromachined inertial sensors |
-
2009
- 2009-10-14 JP JP2009237361A patent/JP5517553B2/ja active Active
- 2009-10-14 US US12/579,098 patent/US8661898B2/en not_active Expired - Fee Related
- 2009-10-14 EP EP09173036.6A patent/EP2177875A3/en not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001021362A (ja) * | 1999-07-12 | 2001-01-26 | Japan Aviation Electronics Industry Ltd | クローズドループ制御リング共振型振動ジャイロ |
| JP2007520716A (ja) * | 2004-02-04 | 2007-07-26 | ビ−エイイ− システムズ パブリック リミテッド カンパニ− | 振動構造ジャイロスコープにおけるバイアス誤差を低減する方法 |
| US20070240508A1 (en) * | 2006-04-18 | 2007-10-18 | Watson William S | Vibrating inertial rate sensor utilizing skewed drive or sense elements |
Non-Patent Citations (1)
| Title |
|---|
| JPN7013002964; E.Arnold, F.Nuscheler: 'A Tuning Fork Gyroscope With Compensated Imbalance Signal' Proc. of SPIE Vol.6589, 20070315 * |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013527455A (ja) * | 2010-05-17 | 2013-06-27 | シリコン、センシング、システムズ、リミテッド | 直角位相除去を有する速度センサ |
| US9341476B2 (en) | 2010-05-17 | 2016-05-17 | Silicon Sensing Systems Limited | Rate sensor with quadrature rejection |
| KR101840318B1 (ko) * | 2010-05-17 | 2018-03-20 | 실리콘 센싱 시스템즈 리미티드 | 쿼드래처를 제거하는 레이트 센서 |
| KR101298286B1 (ko) | 2011-11-30 | 2013-08-20 | 삼성전기주식회사 | 자이로센서 오프셋 자동 보정회로, 자이로센서 시스템 및 자이로센서 오프셋 자동 보정방법 |
| JP2015528899A (ja) * | 2012-06-29 | 2015-10-01 | 株式会社村田製作所 | 改良された振動ジャイロスコープ |
| WO2015107704A1 (ja) * | 2014-01-14 | 2015-07-23 | 三菱電機株式会社 | 半球共振型ジャイロ |
| JPWO2015107704A1 (ja) * | 2014-01-14 | 2017-03-23 | 三菱電機株式会社 | 半球共振型ジャイロ |
| US9989363B2 (en) | 2014-01-14 | 2018-06-05 | Mitsubishi Electric Corporation | Hemispherical resonator gyro |
| KR20160086747A (ko) * | 2015-01-12 | 2016-07-20 | 더 보잉 컴파니 | 성능 개선을 위한 코리올리 진동식 자이로스코프(cvg)의 제어 재분산을 위한 접근법 |
| KR102381898B1 (ko) | 2015-01-12 | 2022-03-31 | 더 보잉 컴파니 | 성능 개선을 위한 코리올리 진동식 자이로스코프(cvg)의 제어 재분산을 위한 접근법 |
| JP2020169819A (ja) * | 2019-04-01 | 2020-10-15 | 国立大学法人東北大学 | ジャイロ装置およびジャイロ装置の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2177875A3 (en) | 2013-04-24 |
| US20100089158A1 (en) | 2010-04-15 |
| US8661898B2 (en) | 2014-03-04 |
| EP2177875A2 (en) | 2010-04-21 |
| JP5517553B2 (ja) | 2014-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5517553B2 (ja) | 直角位相制御方法及びその方法を備えた振動構造ジャイロスコープ | |
| US7526957B2 (en) | Vibrating inertial rate sensor utilizing skewed drive or sense elements | |
| US7874209B2 (en) | Capacitive bulk acoustic wave disk gyroscopes with self-calibration | |
| JP6190866B2 (ja) | 直角位相低減バネを有するmemsジャイロ | |
| JP6180551B2 (ja) | 半球共振型ジャイロ | |
| KR102045982B1 (ko) | 진동 자이로스코프 보정 방법 | |
| US9574902B2 (en) | Calibration method for the scale factor of an axisymmetric vibratory gyroscope or gyrometer | |
| JP6250717B2 (ja) | コリオリ振動ジャイロスコープシステムにおけるバイアスおよびスケールファクター誤差の軽減 | |
| EP1711778A1 (en) | Method for reducing bias error in a vibrating structure gyroscope | |
| JP2013253958A (ja) | バイアス補正機能を備えた振動型ジャイロ | |
| US11835339B1 (en) | Continuous online self-calibration for gyroscopes through modulation of damping axes | |
| GB2319085A (en) | Rotation-measurement apparatus having a vibrating mechanical resonator | |
| JP7115733B2 (ja) | 積分型ジャイロ装置および積分型ジャイロ装置の制御方法 | |
| JP7302129B2 (ja) | ジャイロ装置およびジャイロ装置の制御方法 | |
| CN114894221B (zh) | 一种半球谐振陀螺正交耦合误差标定方法 | |
| JP7707288B2 (ja) | Memsジャイロスコープのための回路および相応の回路の動作方法 | |
| JP6559327B2 (ja) | ジャイロ装置およびジャイロ装置の制御方法 | |
| Watson | Vibratory gyro skewed pick-off and driver geometry | |
| JP2023127142A (ja) | ジャイロ装置およびジャイロ装置の制御方法 | |
| Challoner et al. | Symmetric Piezoelectric CVG with digital control electronics | |
| EP4506660A1 (en) | Gyroscope systems | |
| JPH09105637A (ja) | 振動ジャイロ | |
| JP3783893B2 (ja) | 圧電振動角速度計 | |
| JP4591787B2 (ja) | 振動子および角速度測定装置 | |
| Watson | Improved Vibratory Gyro Pick-off and Driver Geometry |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120123 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121012 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130813 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131112 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131115 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131205 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140318 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5517553 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |