JP2010079844A - 車両用運転支援装置 - Google Patents
車両用運転支援装置 Download PDFInfo
- Publication number
- JP2010079844A JP2010079844A JP2008250551A JP2008250551A JP2010079844A JP 2010079844 A JP2010079844 A JP 2010079844A JP 2008250551 A JP2008250551 A JP 2008250551A JP 2008250551 A JP2008250551 A JP 2008250551A JP 2010079844 A JP2010079844 A JP 2010079844A
- Authority
- JP
- Japan
- Prior art keywords
- information
- driver
- display
- driving
- driving support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Traffic Control Systems (AREA)
Abstract
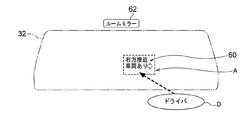
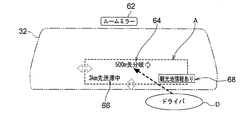
【解決手段】自車両の走行情報を獲得する走行情報取得手段30と、ドライバの運転負担度を検出する負担度検出手段44と、前方から前記情報表示部に視線を移動してフロントウィンドシールド32に表示されている運転支援情報を確認した後に前方に視線を戻すためにドライバDが前方から目を離すことのできる許容時間toffに関して、負担度検出手段からの信号に基づいてドライバDの運転負担度に応じた許容時間toffを決定する許容時間決定手段52と、負担度検出手段からの信号に基づいてフロントウィンドシールド32に表示する運転支援情報の表示範囲AをドライバDの運転負担度の大小に応じて決定する表示範囲決定手段52とを有する。
【選択図】図2
Description
ドライバが視認可能な情報表示部を有し、該情報表示部に運転支援情報を表示する車両用運転支援装置において、
自車両の走行情報を獲得する走行情報取得手段と、
ドライバの運転負担度を検出する負担度検出手段と、
前方から前記情報表示部に視線を移動して該情報表示部に表示されている運転支援情報を確認した後に前方に視線を戻すためにドライバが前方から目を離すことのできる許容時間に関して、前記負担度検出手段からの信号に基づいてドライバの運転負担度に応じた前記許容時間を決定する許容時間決定手段と、
前記負担度検出手段からの信号に基づいて、前記情報表示部に表示する前記運転支援情報の表示範囲を前記ドライバの運転負担度の大小に応じて決定する表示範囲決定手段とを有することを特徴とする車両用運転支援装置を提供することにより達成される。
ドライバの視線の方向を検出して、該ドライバの視線が長く停留している基準視線停留域を求める基準視線停留域算出手段と、該基準視線停留域算出手段により求めた前記基準視線停留域に基づいて前記運転支援情報の表示位置を決定する表示位置決定手段を更に有する。この実施の形態によれば、ドライバが表示情報を読み取るために視線を移動する時間を最適化することで安全性を向上することができる。
前記情報表示部に表示する運転支援情報の優先順位を決定する情報優先順位決定手段を更に有し、該情報優先順位決定手段により定められた優先順位に基づいて前記表示位置が変更される。この実施の形態によれば、情報の優先度に応じた表示位置に情報表示が行われるため、ドライバの視線移動に要する時間を最適化することで安全性を向上することができる。
他の車両や歩行者などが自車両に接触又は衝突する危険度を検出する危険度検出手段を更に有し、前記許容時間決定手段では、前記危険度検出手段により検出した危険度に応じた前記許容時間が決定される。この実施の形態によれば、危険度の度合いに応じた前記許容時間が設定されるため、例えば危険度が高いときには短い許容時間を設定することで、ドライバが情報表示を読み取るのに必要とされる時間を短縮することができ、衝突などからの危険回避の的確性を高めることができる。
前記危険度検出手段により検出した危険度が所定値よりも大きいときに割り込み処理によって危険情報を前記情報表示部に表示する。この実施の形態によれば、危険度が発生した時点で素早く危険情報を表示させることができる。
表示情報を読み取る素早さに関連したドライバ特性を検出するドライバ特性検出手段と、該ドライバ特性検出手段により検出したドライバ特性に応じて前記表示範囲の大きさを補正する表示範囲補正手段とを更に有する。この実施の形態によれば、ドライバの特性に応じた情報表示が可能になる。
前記負担度検出手段により検出したドライバの運転負担度が大きいときに、前記情報優先順位決定手段により決定された優先順位の高い表示情報の表示位置に関して、該優先順位の高い運転支援情報にドライバが視線を移すための移動時間が小さい位置に該優先順位の高い運転支援情報の表示位置が設定される。このように表示情報に優先順位を設定し、優先順位の高い情報に関して視線移動時間が小さい位置に情報表示することで、ドライバは素早く情報を読み取ることができる。
視線移動時間をtm、視角をxとしたときに下記の式1が成立する。
ここに、a1、a0 は回帰モデルの係数である。
ここに、b1、b0は回帰モデルの係数である。
ここに、w:運転負担度
x:視角
tm:視線移動時間
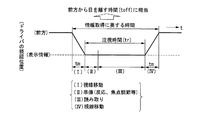
(式4) toff = 2tm + tr = 2×{(b1 w + b0) x + a0}+ tr
(式5) x = (toff− tr − 2a0)/2(b1w + b0)
(2)加速度や車速の絶対値の大きさ、変化の大きさ;
(3)運転中の風景の変化の速さ、変化の複雑さ;
(4)ナビゲーションユニット30の地図情報、経路誘導情報に基づく、道路環境の悪さ・運転負担度合いの高さ(幅の狭い道、複雑な経路、カーブの多い道、交差点の多い道等);
(5)車外センサ情報に基づく、他の交通参加者(周辺車両、歩行者、自転車等)の多さ;
(6)ステアリングハンドル16の操舵量や瞬き画像処理等に基づく、ドライバの意識レベルの低下度合い;
(7)シート接触圧等の変化に基づく、ドライバの疲労度合い;
(8)ドライバDの心拍数(ステアリングセンサ等から検知)変化に基づく、サーカディアンリズムの落ち込み(サーカディアンリズム=ドライバの生体活性度合いの日内変動)など。
(式5) x = (toff− tr − 2a0)/2(b1w + b0)
ここに、toffは許容時間であり、trは注視時間(情報読み取り時間+準備時間)である。
(1)複数の作業の同時遂行や、目新しい作業へ対処する、対応能力があるかどうか;
(2)「ながら作業」の傾向があるかどうか(「ながら作業」の傾向がある場合、複数の表示を素早く読み取ることができると考えられる);
12 前方監視カメラ
14 ドライバ視線監視カメラ
16 ステアリングハンドル
18 舵角センサ
20 ペダルセンサ
22 ペダルセンサ
24 オーディオ操作部
30 ナビゲーションユニット
32 フロントウィンドシールド
40 第1実施例の運転支援装置
42 表示情報決定部
44 運転負担算出部
46 危険度算出部
50 許容時間算出部
52 表示範囲算出部
54 情報読み取り時間決定部
56 表示位置決定部
58 情報優先順位決定部
100 第2実施例の運転支援装置
102 ドライバ特性判定部
A 表示範囲
Claims (8)
- ドライバが視認可能な情報表示部を有し、該情報表示部に運転支援情報を表示する車両用運転支援装置において、
自車両の走行情報を獲得する走行情報取得手段と、
ドライバの運転負担度を検出する負担度検出手段と、
前方から前記情報表示部に視線を移動して該情報表示部に表示されている運転支援情報を確認した後に前方に視線を戻すためにドライバが前方から目を離すことのできる許容時間に関して、前記負担度検出手段からの信号に基づいてドライバの運転負担度に応じた前記許容時間を決定する許容時間決定手段と、
前記負担度検出手段からの信号に基づいて、前記情報表示部に表示する前記運転支援情報の表示範囲を前記ドライバの運転負担度の大小に応じて決定する表示範囲決定手段とを有することを特徴とする車両用運転支援装置。 - ドライバの視線の方向を検出して、該ドライバの視線が長く停留している基準視線停留域を求める基準視線停留域算出手段と、
該基準視線停留域算出手段により求めた前記基準視線停留域に基づいて前記運転支援情報の表示位置を決定する表示位置決定手段を更に有する、請求項1に記載の車両用運転支援装置。 - 前記情報表示部に表示する運転支援情報の優先順位を決定する情報優先順位決定手段を更に有し、
該情報優先順位決定手段により定められた優先順位に基づいて前記表示位置が変更される、請求項2に記載の車両用運転支援装置。 - 他の車両や歩行者などが自車両に接触又は衝突する危険度を検出する危険度検出手段を更に有し、
前記許容時間決定手段では、前記危険度検出手段により検出した危険度に応じた前記許容時間が決定される、請求項1に記載の車両用運転支援装置。 - 前記危険度検出手段により検出した危険度が所定値よりも大きいときに割り込み処理によって危険情報を前記情報表示部に表示する、請求項4に記載の車両用運転支援装置。
- 表示情報を読み取る素早さに関連したドライバ特性を検出するドライバ特性検出手段と、
該ドライバ特性検出手段により検出したドライバ特性に応じて前記表示範囲の大きさを補正する表示範囲補正手段とを更に有する、請求項1に記載の車両用運転支援装置。 - 前記ドライバ特性検出手段が、ドライバが操作する操作部材の操作頻度によって、該操作頻度が大きいときに、ドライバが表示情報を素早く読み取るドライバ特性を有すると判定して、前記表示範囲補正手段により前記表示範囲を拡大する、請求項6に記載の車両用運転支援装置。
- 前記負担度検出手段により検出したドライバの運転負担度が大きいときに、前記情報優先順位決定手段により決定された優先順位の高い表示情報の表示位置に関して、該優先順位の高い運転支援情報にドライバが視線を移すための移動時間が小さい位置に該優先順位の高い運転支援情報の表示位置が設定される、請求項3に記載の車両用運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008250551A JP5311012B2 (ja) | 2008-09-29 | 2008-09-29 | 車両用運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008250551A JP5311012B2 (ja) | 2008-09-29 | 2008-09-29 | 車両用運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010079844A true JP2010079844A (ja) | 2010-04-08 |
| JP5311012B2 JP5311012B2 (ja) | 2013-10-09 |
Family
ID=42210171
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008250551A Expired - Fee Related JP5311012B2 (ja) | 2008-09-29 | 2008-09-29 | 車両用運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5311012B2 (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015025350A1 (ja) * | 2013-08-19 | 2015-02-26 | 三菱電機株式会社 | 車載表示制御装置 |
| WO2015173982A1 (ja) * | 2014-05-16 | 2015-11-19 | 三菱電機株式会社 | 運転支援装置 |
| JP2016118838A (ja) * | 2014-12-19 | 2016-06-30 | 株式会社デンソー | 情報提示制御装置、情報提示方法 |
| JPWO2015008363A1 (ja) * | 2013-07-18 | 2017-03-02 | 三菱電機株式会社 | 情報提示装置及び情報提示方法 |
| JP2017124736A (ja) * | 2016-01-14 | 2017-07-20 | マツダ株式会社 | 運転支援装置 |
| JP2017220095A (ja) * | 2016-06-09 | 2017-12-14 | 株式会社デンソー | 車両用運転支援システム及び運転支援方法 |
| JP2019118429A (ja) * | 2017-12-28 | 2019-07-22 | 株式会社豊田中央研究所 | 視覚負担定量装置 |
| US10628020B2 (en) | 2015-08-26 | 2020-04-21 | Fujifilm Corporation | Projection type display device |
| WO2020145093A1 (en) * | 2019-01-11 | 2020-07-16 | Ricoh Company, Ltd. | Display controller, display device, display system, mobile object, image generation method, and carrier means |
| CN111936345A (zh) * | 2018-04-11 | 2020-11-13 | 三菱电机株式会社 | 视线引导装置及视线引导方法 |
| JP2021170225A (ja) * | 2020-04-15 | 2021-10-28 | 株式会社Subaru | 車両の制御装置 |
| US11878698B2 (en) | 2019-04-12 | 2024-01-23 | Mitsubishi Electric Corporation | Display control device, display control method, and storage medium storing display control program |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002019491A (ja) * | 2000-07-11 | 2002-01-23 | Mazda Motor Corp | 車両の表示装置 |
| JP2002104018A (ja) * | 2000-09-28 | 2002-04-09 | Nissan Motor Co Ltd | 警報制御装置 |
| JP2006284458A (ja) * | 2005-04-01 | 2006-10-19 | Denso Corp | 運転支援情報表示システム |
| JP2007293495A (ja) * | 2006-04-24 | 2007-11-08 | Toyota Motor Corp | 運転者行動評価装置 |
-
2008
- 2008-09-29 JP JP2008250551A patent/JP5311012B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002019491A (ja) * | 2000-07-11 | 2002-01-23 | Mazda Motor Corp | 車両の表示装置 |
| JP2002104018A (ja) * | 2000-09-28 | 2002-04-09 | Nissan Motor Co Ltd | 警報制御装置 |
| JP2006284458A (ja) * | 2005-04-01 | 2006-10-19 | Denso Corp | 運転支援情報表示システム |
| JP2007293495A (ja) * | 2006-04-24 | 2007-11-08 | Toyota Motor Corp | 運転者行動評価装置 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2015008363A1 (ja) * | 2013-07-18 | 2017-03-02 | 三菱電機株式会社 | 情報提示装置及び情報提示方法 |
| WO2015025350A1 (ja) * | 2013-08-19 | 2015-02-26 | 三菱電機株式会社 | 車載表示制御装置 |
| JPWO2015025350A1 (ja) * | 2013-08-19 | 2017-03-02 | 三菱電機株式会社 | 車載表示制御装置 |
| WO2015173982A1 (ja) * | 2014-05-16 | 2015-11-19 | 三菱電機株式会社 | 運転支援装置 |
| JP2016118838A (ja) * | 2014-12-19 | 2016-06-30 | 株式会社デンソー | 情報提示制御装置、情報提示方法 |
| US10628020B2 (en) | 2015-08-26 | 2020-04-21 | Fujifilm Corporation | Projection type display device |
| JP2017124736A (ja) * | 2016-01-14 | 2017-07-20 | マツダ株式会社 | 運転支援装置 |
| JP2017220095A (ja) * | 2016-06-09 | 2017-12-14 | 株式会社デンソー | 車両用運転支援システム及び運転支援方法 |
| JP2019118429A (ja) * | 2017-12-28 | 2019-07-22 | 株式会社豊田中央研究所 | 視覚負担定量装置 |
| CN111936345A (zh) * | 2018-04-11 | 2020-11-13 | 三菱电机株式会社 | 视线引导装置及视线引导方法 |
| CN111936345B (zh) * | 2018-04-11 | 2023-08-15 | 三菱电机株式会社 | 视线引导装置 |
| WO2020145093A1 (en) * | 2019-01-11 | 2020-07-16 | Ricoh Company, Ltd. | Display controller, display device, display system, mobile object, image generation method, and carrier means |
| JP2020111202A (ja) * | 2019-01-11 | 2020-07-27 | 株式会社リコー | 表示制御装置、表示装置、表示システム、移動体、プログラム、画像生成方法 |
| US11547361B2 (en) | 2019-01-11 | 2023-01-10 | Ricoh Company, Ltd. | Display controller, display device, display system, mobile object, image generation method, and carrier means |
| US11878698B2 (en) | 2019-04-12 | 2024-01-23 | Mitsubishi Electric Corporation | Display control device, display control method, and storage medium storing display control program |
| JP2021170225A (ja) * | 2020-04-15 | 2021-10-28 | 株式会社Subaru | 車両の制御装置 |
| JP7597517B2 (ja) | 2020-04-15 | 2024-12-10 | 株式会社Subaru | 車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5311012B2 (ja) | 2013-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5311012B2 (ja) | 車両用運転支援装置 | |
| US11008016B2 (en) | Display system, display method, and storage medium | |
| CN107521411B (zh) | 一种辅助驾驶员的车道级导航增强现实装置 | |
| JP6342856B2 (ja) | 車両制御装置 | |
| US8626427B2 (en) | User interface method for terminal for vehicle and apparatus thereof | |
| US9248796B2 (en) | Visually-distracted-driving detection device | |
| CN105324267B (zh) | 驾驶支援装置 | |
| JP2011198247A (ja) | 運転支援装置 | |
| JP6460019B2 (ja) | 車両の制御装置 | |
| US20200369149A1 (en) | Method for displaying the course of a safety zone in front of a transportation vehicle or an object by a display unit, device for carrying out the method, and transportation vehicle and computer program | |
| JP5327025B2 (ja) | 車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム | |
| JP2011070311A (ja) | 運転支援表示装置 | |
| JP2009269551A (ja) | 車両用表示装置 | |
| CN105398379A (zh) | 驾驶辅助影像显示方法 | |
| JP2011148369A (ja) | 運転支援装置 | |
| JP2018100008A (ja) | 車両用表示装置 | |
| JP2009157490A (ja) | 車両の運転支援装置 | |
| JP7298456B2 (ja) | 車両用表示制御装置、車両用表示制御方法、及び車両用表示制御プログラム | |
| JP2013068115A (ja) | 車両用情報処理装置及び車両用情報処理方法 | |
| JP6701913B2 (ja) | 車両の制御装置 | |
| JP2019096108A (ja) | 運転支援装置 | |
| JP2006035995A (ja) | 車両用表示装置 | |
| JP2005215771A (ja) | 操舵支援装置及び操舵支援プログラム | |
| JP2000168400A (ja) | 車両の表示装置 | |
| JP2009149306A (ja) | 車両用表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110802 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120723 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130321 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130329 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130618 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5311012 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |