JP2010070160A - 車両の駆動装置 - Google Patents
車両の駆動装置 Download PDFInfo
- Publication number
- JP2010070160A JP2010070160A JP2008242689A JP2008242689A JP2010070160A JP 2010070160 A JP2010070160 A JP 2010070160A JP 2008242689 A JP2008242689 A JP 2008242689A JP 2008242689 A JP2008242689 A JP 2008242689A JP 2010070160 A JP2010070160 A JP 2010070160A
- Authority
- JP
- Japan
- Prior art keywords
- state
- electric motor
- rotating member
- actuator
- lock
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 85
- 230000007704 transition Effects 0.000 claims description 61
- 238000002485 combustion reaction Methods 0.000 claims description 17
- 230000005540 biological transmission Effects 0.000 claims description 15
- 238000012937 correction Methods 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 6
- 238000005259 measurement Methods 0.000 claims description 4
- 230000035939 shock Effects 0.000 abstract description 9
- 238000000034 method Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 12
- 238000012546 transfer Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 6
- 230000001276 controlling effect Effects 0.000 description 5
- 230000009467 reduction Effects 0.000 description 4
- 239000011435 rock Substances 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000005012 migration Effects 0.000 description 1
- 238000013508 migration Methods 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
【解決手段】駆動装置2は、第1モータ・ジェネレータ4と一体回転可能な連結部材21をケース17に対して係合させて第1モータ・ジェネレータ4をロックする係合状態とそのロックを解除する解放状態との間で切り替え可能で、かつ解放状態から係合状態への移行後に連結部材21に生じる正転方向のトルクを利用することによりアクチュエータ32の動力なしに係合状態を維持でき、かつ逆転方向の連結部材21の回転を許容するロック機構30を備え、解放状態から係合状態へ移行させる移行操作がアクチュエータ32にて行われる際に連結部材21が逆転方向に回転している状態となるように第1モータ・ジェネレータ4を制御する。
【選択図】図1
Description
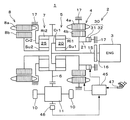
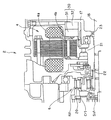
図1は本発明の一形態に係る駆動装置が組み込まれた車両の全体構成を概略的に示しており、図2は図1に示された駆動装置の要部を詳細に示している。車両1はいわゆるハイブリッド車両として構成されている。周知のようにハイブリッド車両は、内燃機関を走行用の駆動力源として備えるとともに、電動機を他の走行用の駆動力源として備えた車両である。車両1は、駆動輪と内燃機関とが車両前部に位置するFFレイアウトの車両として構成されている。
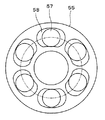
次に、図10〜14を参照して本発明の第2の形態を説明する。本形態はロック機構の構成及び制御内容を除いて第1の形態と同一である。従って、第2の形態に係るロック機構を備えた駆動装置が組み込まれた車両の全体構成に関しては図1及び図2が適宜参照される。また、以下の説明において第1の形態と共通する構成に関しては図10〜図14に第1の形態と同一符号を付して説明を省略する。また、特に断らない限り、図7及び図9に示した第1の形態に係る制御と同一の制御を第2の形態に対しても適用できる。
3 内燃機関
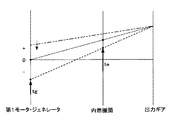
4 第1モータ・ジェネレータ(電動機)
17 ケース(固定部材)
21 回転部材(連結部材)
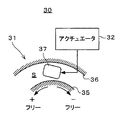
30 ロック機構
31 係合機構(セルフロック手段)
32 アクチュエータ
45 ロック制御装置(制御手段)
50 ロック機構
51 係合機構(セルフロック手段、係合補助手段)
52 アクチュエータ
61 摩擦部
Claims (7)
- 動力伝達経路に配置された電動機と、前記電動機と一体回転可能な回転部材を固定部材に対して係合させて前記電動機をロックする係合状態とそのロックを解除する解放状態との間で切り替え可能なロック機構と、を備え、前記ロック機構は、所定の動力により前記解放状態から前記係合状態へ移行させることができるアクチュエータと、前記解放状態から前記係合状態への移行後に前記回転部材に生じる所定方向のトルクを利用することにより前記アクチュエータの動力なしに前記係合状態を維持でき、かつ前記所定方向と反対方向の前記回転部材の回転を許容するセルフロック手段と、を有する車両の駆動装置であって、
前記解放状態から前記係合状態へ移行させる移行操作が前記アクチュエータにて行われる際に前記回転部材が前記所定方向と反対方向に回転している状態となるように前記電動機を制御する制御手段を更に備えることを特徴とする車両の駆動装置。 - 前記制御手段は、前記回転部材に生じるトルクの目標値と実測値との差が低減するように前記電動機をフィードバック補正するとともに、前記アクチュエータにて前記移行操作が行われる際に前記フィードバック補正を禁止する請求項1に記載の駆動装置。
- 前記制御手段は、前記移行操作の開始後、前記回転部材に生じるトルクが徐々に低減するように前記電動機を制御する請求項1又は2に記載の駆動装置。
- 前記制御手段は、前記回転部材の回転数変化に基づいて前記移行操作の完了を判定する請求項1〜3のいずれか一項に記載の駆動装置。
- 前記動力伝達経路に配置された内燃機関を更に備え、
前記制御手段は、前記移行操作の完了後に前記回転部材のトルクが0となるように前記電動機を制御する請求項1〜4のいずれか一項に記載の駆動装置。 - 動力伝達経路に配置された電動機と、前記電動機と一体回転可能な回転部材を固定部材に対して係合させて前記電動機をロックする係合状態とそのロックを解除する解放状態との間で切り替え可能なロック機構と、を備え、前記ロック機構は、所定の動力により前記解放状態から前記係合状態へ移行させることができるアクチュエータと、前記解放状態から前記係合状態への移行後に所定の位相差範囲外において前記回転部材に生じるトルクを利用することにより前記アクチュエータの動力なしに前記係合状態を維持でき、かつ前記位相差範囲内において前記回転部材の回転を許容するセルフロック手段と、を有する車両の駆動装置であって、
前記解放状態から前記係合状態へ移行させる移行操作が前記アクチュエータにて行われる際に前記回転部材が前記位相差範囲内に維持されるように前記電動機を制御する制御手段を更に備えることを特徴とする車両の駆動装置。 - 動力伝達経路に配置された電動機と、前記電動機と一体回転可能な回転部材を固定部材に対して係合させて前記電動機をロックする係合状態とそのロックを解除する解放状態との間で切り替え可能なロック機構と、を備え、前記ロック機構は、前記固定部材に対して静止した摩擦部と、前記摩擦部から離れた状態から前記摩擦部に接触する状態までの間を移動でき、かつ前記回転部材と一体回転するクラッチ要素と、前記解放状態から前記係合状態へ移行させる際に前記クラッチ要素を前記摩擦部に引き寄せて接触させるアクチュエータと、前記解放状態から前記係合状態への移行後に所定の位相差範囲外において前記回転部材に生じるトルクを利用して前記クラッチ要素を前記摩擦部に押し付ける方向の力を発生させ、かつ前記位相差範囲内において前記回転部材の回転を許容する係合補助手段と、を有する車両の駆動装置であって、
前記解放状態から前記係合状態へ移行させる移行操作が前記アクチュエータにて行われる際に前記回転部材が前記位相差範囲内に維持されるように前記電動機を制御する制御手段を更に備えることを特徴とする車両の駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008242689A JP5239681B2 (ja) | 2008-09-22 | 2008-09-22 | 車両の駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008242689A JP5239681B2 (ja) | 2008-09-22 | 2008-09-22 | 車両の駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010070160A true JP2010070160A (ja) | 2010-04-02 |
| JP5239681B2 JP5239681B2 (ja) | 2013-07-17 |
Family
ID=42202333
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008242689A Expired - Fee Related JP5239681B2 (ja) | 2008-09-22 | 2008-09-22 | 車両の駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5239681B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014170966A1 (ja) * | 2013-04-16 | 2014-10-23 | トヨタ自動車株式会社 | 係合装置及び動力伝達装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101795079B1 (ko) | 2012-12-13 | 2017-11-07 | 현대자동차주식회사 | 차량의 액츄에이터 제어방법 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09156387A (ja) * | 1995-12-05 | 1997-06-17 | Aqueous Res:Kk | ハイブリッド車両 |
| JP2000102108A (ja) * | 1998-09-28 | 2000-04-07 | Hitachi Ltd | ハイブリッド車 |
| JP2000310260A (ja) * | 1999-04-28 | 2000-11-07 | Nissan Motor Co Ltd | 複合クラッチ装置 |
| JP2002316542A (ja) * | 2001-04-23 | 2002-10-29 | Nissan Motor Co Ltd | ハイブリッド車両用駆動装置 |
| JP2007205519A (ja) * | 2006-02-03 | 2007-08-16 | Ntn Corp | 回転伝達装置 |
-
2008
- 2008-09-22 JP JP2008242689A patent/JP5239681B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09156387A (ja) * | 1995-12-05 | 1997-06-17 | Aqueous Res:Kk | ハイブリッド車両 |
| JP2000102108A (ja) * | 1998-09-28 | 2000-04-07 | Hitachi Ltd | ハイブリッド車 |
| JP2000310260A (ja) * | 1999-04-28 | 2000-11-07 | Nissan Motor Co Ltd | 複合クラッチ装置 |
| JP2002316542A (ja) * | 2001-04-23 | 2002-10-29 | Nissan Motor Co Ltd | ハイブリッド車両用駆動装置 |
| JP2007205519A (ja) * | 2006-02-03 | 2007-08-16 | Ntn Corp | 回転伝達装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014170966A1 (ja) * | 2013-04-16 | 2014-10-23 | トヨタ自動車株式会社 | 係合装置及び動力伝達装置 |
| CN105121916A (zh) * | 2013-04-16 | 2015-12-02 | 丰田自动车株式会社 | 卡合装置及动力传递装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5239681B2 (ja) | 2013-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10086841B2 (en) | Control apparatus for transmission | |
| JP5316724B2 (ja) | 車両用駆動装置 | |
| JP2006038136A (ja) | 駆動装置 | |
| JP5834927B2 (ja) | 車両用駆動装置 | |
| JP2010269692A (ja) | ハイブリッド車両の駆動装置 | |
| JP2010254179A (ja) | ハイブリッド車両の制御装置 | |
| WO2014109036A1 (ja) | 係合装置及びハイブリッド車両用駆動装置 | |
| JP2010280315A (ja) | ハイブリッド車両の駆動装置 | |
| JP5930121B2 (ja) | 係合装置及び動力伝達装置 | |
| JP2009068624A (ja) | 変速機の制御装置 | |
| JP5104658B2 (ja) | 駆動装置 | |
| JP5239681B2 (ja) | 車両の駆動装置 | |
| JP4566230B2 (ja) | 駆動装置 | |
| JP5081744B2 (ja) | 車両の駆動装置 | |
| JP2009222105A (ja) | 車両の制御装置 | |
| JP2010071448A (ja) | 車両の駆動装置 | |
| JP2014062554A (ja) | 噛合式係合装置の制御装置 | |
| JP2014211213A (ja) | 動力伝達装置 | |
| JP2009127843A (ja) | ドグクラッチ及び動力伝達装置 | |
| JP2011168085A (ja) | 車両の駆動装置 | |
| JP2016217489A (ja) | 自動変速機 | |
| JP2010215079A (ja) | 車両の制御装置 | |
| JP4952543B2 (ja) | 車両用ハイブリッド駆動装置の制御装置 | |
| JP2011047424A (ja) | クラッチ装置の異常検出装置 | |
| JP2014097689A (ja) | ハイブリッド車の動力伝達装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120810 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130208 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130318 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5239681 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |