JP2010064183A - ボルト締付装置 - Google Patents
ボルト締付装置 Download PDFInfo
- Publication number
- JP2010064183A JP2010064183A JP2008232155A JP2008232155A JP2010064183A JP 2010064183 A JP2010064183 A JP 2010064183A JP 2008232155 A JP2008232155 A JP 2008232155A JP 2008232155 A JP2008232155 A JP 2008232155A JP 2010064183 A JP2010064183 A JP 2010064183A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- tightening
- bolt
- controller
- nut runner
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000006243 chemical reaction Methods 0.000 claims description 49
- 238000006073 displacement reaction Methods 0.000 claims description 15
- 238000000034 method Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000002411 adverse Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images


Abstract
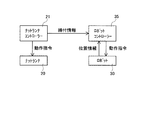
【解決手段】ロボット30に取り付けたナットランナ20によってボルトをパルス締付により締め付けるボルト締付装置10において、ロボット30の動作を制御するロボットコントローラ35と、ナットランナ20の動作を制御するナットランナコントローラ21と、を有し、ナットランナコントローラ21は、ナットランナ20によるボルトの締付制御情報をロボットコントローラ35へ送信し、ロボットコントローラ35は、ボルトのパルス締付の際に発生するロボット30の振動を低減するように、ロボット30の動作を制御するための制御信号を締付制御情報に基づいて生成し、その制御信号をロボット30に送信する。
【選択図】図3
Description
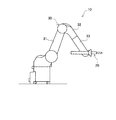
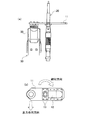
そこでまず、第1の実施の形態に係るボルト締付装置について、図1〜図3を参照しながら説明する。図1は、第1の実施の形態に係るボルト締付装置の概略構成を示す側面図である。図2は、ボルト締付装置におけるナットランナ取付部付近を示す図であり、(a)はナットランナ取付部付近の上面図、(b)は締付トルクと締付反力との関係を示す図である。図3は、ボルト締付装置の制御ブロック図である。
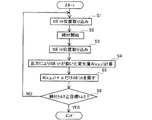
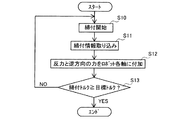
次に、第2の実施の形態について説明する。第2の実施の形態に係るボルト締付装置は、その装置構成を第1の実施の形態と同じくするが、ボルトの締付制御が異なる。そのため、以下ではこの点について、図5を参照しながら説明する。図5は、第2の実施の形態におけるボルトの締付制御の内容を示すフローチャートである。
11 取付フレーム
20 ナットランナ
21 ナットランナコントローラ
30 ロボット
35 ロボットコントローラ
Claims (4)
- ロボットに取り付けたナットランナによってボルトをパルス締付により締め付けるボルト締付装置において、
前記ロボットの動作を制御するロボットコントローラと、
前記ナットランナの動作を制御するナットランナコントローラと、
を有し、
前記ナットランナコントローラは、前記ナットランナによるボルトの締付制御情報を前記ロボットコントローラへ送信し、
前記ロボットコントローラは、ボルトのパルス締付の際に発生する前記ロボットの振動を低減するように、前記ロボットの動作を制御するための制御信号を前記締付制御情報に基づいて生成し、前記制御信号を前記ロボットに送信する
ことを特徴とするボルト締付装置。 - 請求項1に記載するボルト締付装置において、
前記制御信号は、ボルトの締付反力に対して前記ロボットを元の位置に復帰させるための復帰変位量よりも小さい修正復帰変位量だけ前記ロボットを元に戻すための信号である
ことを特徴とするボルト締付装置。 - 請求項2に記載するボルト締付装置において、
前記修正復帰変位量は、前記ロボットの位置情報から算出した前記復帰変位量に対して、前記締付制御情報から決定される係数α(0<α<1)を乗じて算出されるものである
ことを特徴とするボルト締付装置。 - 請求項1に記載するボルト締付装置において、
前記制御信号は、ボルトの締付反力の発生に同期して締付反力と逆方向への駆動力を前記ロボットに付与するための信号である
ことを特徴とするボルト締付装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008232155A JP4985595B2 (ja) | 2008-09-10 | 2008-09-10 | ボルト締付装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008232155A JP4985595B2 (ja) | 2008-09-10 | 2008-09-10 | ボルト締付装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010064183A true JP2010064183A (ja) | 2010-03-25 |
| JP4985595B2 JP4985595B2 (ja) | 2012-07-25 |
Family
ID=42190222
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008232155A Expired - Fee Related JP4985595B2 (ja) | 2008-09-10 | 2008-09-10 | ボルト締付装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4985595B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH068074A (ja) * | 1992-06-29 | 1994-01-18 | Toyota Motor Corp | ネジ締め付け装置 |
| JPH07136953A (ja) * | 1993-11-18 | 1995-05-30 | Tsubakimoto Chain Co | 産業用ロボットの制御方法 |
| JPH09174469A (ja) * | 1995-12-25 | 1997-07-08 | Kawasaki Heavy Ind Ltd | ロボットの制御方法および装置 |
| JP2004082303A (ja) * | 2002-08-28 | 2004-03-18 | Toyota Motor Corp | 回転締付装置 |
-
2008
- 2008-09-10 JP JP2008232155A patent/JP4985595B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH068074A (ja) * | 1992-06-29 | 1994-01-18 | Toyota Motor Corp | ネジ締め付け装置 |
| JPH07136953A (ja) * | 1993-11-18 | 1995-05-30 | Tsubakimoto Chain Co | 産業用ロボットの制御方法 |
| JPH09174469A (ja) * | 1995-12-25 | 1997-07-08 | Kawasaki Heavy Ind Ltd | ロボットの制御方法および装置 |
| JP2004082303A (ja) * | 2002-08-28 | 2004-03-18 | Toyota Motor Corp | 回転締付装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4985595B2 (ja) | 2012-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4339275B2 (ja) | インパクト式のネジ締め装置の制御方法および装置 | |
| JP5417161B2 (ja) | ロボットの制振方法およびロボットの制御装置 | |
| JP5197614B2 (ja) | 工作機械 | |
| JP2010264514A (ja) | 自動ねじ締め装置とその制御方法 | |
| WO2006043550A1 (ja) | 溶接システムおよび消耗電極式溶接方法 | |
| JP2013066954A (ja) | ロボット及びロボットの制御方法 | |
| US9933616B2 (en) | Mirror angular-positioning apparatus and processing apparatus | |
| JP2009066754A (ja) | 電気的な締付力印加機構を有する工作機械にて遠心力補正を行う方法及び装置 | |
| JP2011020188A (ja) | ロボット装置およびロボット装置の制御方法 | |
| JP5652620B2 (ja) | ボルトナット締付方法及びボルトナット締付装置 | |
| JP5333813B2 (ja) | モータ制御装置及び機械システム | |
| JP2005144625A (ja) | 手持ち式電動工具の制御装置 | |
| JP2007118144A (ja) | 産業用ロボット | |
| JP2007336705A (ja) | モータ制御装置 | |
| JP4985595B2 (ja) | ボルト締付装置 | |
| JP6013681B2 (ja) | サーボプレス装置 | |
| JP2010149203A5 (ja) | ||
| JP5351239B2 (ja) | ネジ締め装置 | |
| JPH07214435A (ja) | 自動ネジ締め装置 | |
| JP5189926B2 (ja) | モータ制御装置 | |
| JP2013031900A (ja) | ねじ締め装置およびねじ締め方法 | |
| JP4425237B2 (ja) | モータ制御装置 | |
| JP2000158282A (ja) | 工作機械の主軸頭及び主軸頭の制振方法 | |
| WO2022259874A1 (ja) | ロボット制御方法及びロボット制御装置 | |
| JP2013127670A (ja) | 制御装置及び駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101104 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110506 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120403 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120416 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4985595 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |