以下、図面を参照して本発明の用紙搬送装置及び画像形成装置の実施の形態について説明する。
<第1の実施の形態の用紙搬送装置の構成例>
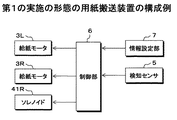
図1及び図2は、第1の実施の形態の用紙搬送装置の一例を示す構成図で、図1(a)は、第1の実施の形態の用紙搬送装置を駆動ローラの側から見た模式的な平面図、図1(b)は、第1の実施の形態の用紙搬送装置を従動ローラの側から見た模式的な平面図である。また、図2(a),図2(b)は、第1の実施の形態の用紙搬送装置を用紙の搬送方向に対する一の側方から見た模式的な側面図である。また、図3は、第1の実施の形態の用紙搬送装置の制御系の一例を示す機能ブロック図である。
第1の実施の形態の用紙搬送装置1Aは、用紙Pを搬送する給紙ローラ対2L,2Rと、給紙ローラ対2L,2Rを独立して駆動する給紙モータ3L,3Rを備える。
給紙ローラ対2Lは、用紙Pの搬送方向に対して左側に配置され、給紙モータ3Lに駆動される駆動ローラ20Lと、駆動ローラ20Lに対向配置される従動ローラ21Lを備える。給紙ローラ対2Rは、用紙Pの搬送方向に対して右側に配置され、給紙モータ3Rに駆動される駆動ローラ20Rと、駆動ローラ20Rに対向配置される従動ローラ21Rを備える。
駆動ローラ20Lと駆動ローラ20Rは、独立した軸に支持されて同軸上に配置され、従動ローラ21Lと従動ローラ21Rは、独立した軸に支持されて同軸上に配置される。
駆動ローラ20Lは給紙モータ3Lの駆動力が伝達され、駆動ローラ20Rは給紙モータ3Rの駆動力が伝達されて、駆動ローラ20Lと駆動ローラ20Rは、独立して駆動が可能である。
用紙搬送装置1Aは、給紙ローラ対2Lと給紙ローラ対2Rの何れか、本例では、給紙ローラ対2Rによる用紙Pの圧着及び圧着の解除を行う圧着離間機構4Rを備える。圧着離間機構4Rは、給紙ローラ対2Rを構成する駆動ローラ20Rと従動ローラ21Rのいずれか、本例では、従動ローラ21Rを用紙Pに対して圧着及び離間する方向に移動可能に支持する支持部材40Rを備える。また、圧着離間機構4Rは、従動ローラ21Rを用紙Pに対して圧着及び離間する方向に移動させるソレノイド及びバネ等を有した駆動部41Rを備える。
用紙搬送装置1Aは、用紙Pの曲がり量等を検知する検知センサ5を備える。検知センサ5は例えばラインセンサで構成され、用紙Pの幅方向における所定の範囲で用紙Pの搬送方向の先端位置が検知される。また。用紙Pの幅方向における一方の側端、本例では搬送方向に対して左端位置が検知される。
これにより、検知センサ5の出力から、搬送される用紙Pが曲がっているか否か、及び用紙Pの側端位置等が検知される。また、用紙Pが曲がっている場合は、検知センサ5の出力から、用紙Pの曲がり量と曲がり方向が検知される。例えば、用紙Pの幅方向において左右のどちらが先行(遅延)しているか、及び左右の先行(遅延)量が検知される。
用紙搬送装置1Aは、検知センサ5の出力に基づいて、用紙Pの搬送制御を行う制御部6を備える。制御部6は、検知センサ5の出力から検知された用紙Pの曲がり量と曲がり方向に基づき給紙モータ3L及び給紙モータ3Rを制御して、用紙Pの曲がりを補正する曲がり補正制御を行う。また、圧着離間機構4Rを制御して、曲がり補正制御によって用紙Pに発生したシワを除去するシワ補正制御を行う。
用紙搬送装置1Aは、搬送される用紙Pの紙情報が設定される情報設定部7を備える。情報設定部7は、用紙Pのサイズ、紙種、坪量、紙目等の紙情報が操作者等によって予め設定され、設定された紙情報が図示しない記憶部に記憶される。
制御部6は、シワ補正制御で用紙Pから離間させる従動ローラ21Rによる用紙Pの再圧着の有無を示す再圧着フラグNと、再圧着を行う場合の離間時間であるシワ補正時間Tを、情報設定部7で設定された紙情報に基づいて設定する。
<画像形成装置の構成例>
図4は、本発明の用紙搬送装置が適用された本実施の形態の画像形成装置の一例を示す全体構成図である。本実施の形態の画像形成装置100Aは、画像形成装置本体GHと画像読取装置YS等を備える。画像形成装置本体GHは、タンデム型カラー画像形成部と称されるもので、複数組の画像形成ユニット10Y,10M,10C,10Kと、中間転写体16と、2次転写部17A等を備える。
画像形成装置本体GHの上部には、自動原稿送り装置101と走査露光装置102を備えた画像読取装置YSが設置されている。自動原稿送り装置101の原稿台上に載置された原稿dは、搬送部101aにより搬送され、走査露光装置102の光学系102aにより原稿dの片面または両面の画像が走査露光され、ラインイメージセンサCCDに読み込まれる。
ラインイメージセンサCCDにより光電変換された画像信号は、図示しない画像処理部において、アナログ処理、A/D変換、シェーディング補正、画像圧縮処理等が行われた後、露光部13Y,13M,13C,13Kに送られる。
イエロー(Y)色の画像を形成する画像形成ユニット10Yは、ドラム状の感光体11Yの周囲に帯電部12Y、露光部13Y、現像部14Y、一次転写部17Y及びクリーニング部18Yを有する。マゼンタ(M)色の画像を形成する画像形成ユニット10Mは、ドラム状の感光体11Mの周囲に帯電部12M、露光部13M、現像部14M、一次転写部17M及びクリーニング部18Mを有する。
シアン(C)色の画像を形成する画像形成ユニット10Cは、ドラム状の感光体11Cの周囲に帯電部12C、露光部13C、現像部14C、一次転写部17C及びクリーニング部18Cを有する。黒(Bk)色の画像を形成する画像形成ユニット10Kは、ドラム状の感光体11Kの周囲に帯電部12K、露光部13K、現像部14K、一次転写部17K及びクリーニング部18Kを有する。そして、帯電部12Yと露光部13Y、帯電部12Mと露光部13M、帯電部12Cと露光部13C、及び帯電部12Kと露光部13Kは、潜像形成部を構成する。
なお、現像部14Y,14M,14C,14Kは、イエロー(Y)、マゼンタ(M)、シアン(C)及び黒(K)のトナーとキャリアからなる2成分現像剤を収容している。
中間転写体16は、複数のローラにより巻回され、回動可能に支持されている。定着装置19は、定着ローラ93及び加圧ローラ94を有し、定着ローラ93と加圧ローラ94との間に形成されたニップ部で用紙P上のトナー像を加熱及び加圧して定着する。
画像形成ユニット10Y,10M,10C,10Kより形成された各色のトナー像は、回動する中間転写体16上に一次転写部17Y,17M,17C,17Kにより逐次転写され、中間転写体16上に各色のトナー像が重ね合わされたカラートナー像が形成される。
給紙トレイ200内に収容された用紙Pは、給紙部201の分離繰出ローラ202により1枚毎に分離され、給紙ローラ203で用紙搬送装置1Aに搬送される。画像形成装置100Aにおいて、図1及び図2で説明した給紙ローラ対2L,2Rはレジストローラと称される。
給紙ローラ203で給紙ローラ対2L,2Rへ給紙された用紙Pは、必要に応じて後述する曲がり補正制御及びシワ補正制御を行った後、給紙ローラ対2L,2Rで一旦停止される。そして、用紙Pの先端と中間転写体16上のトナー像との位置が一致するタイミングで、給紙ローラ対2L,2Rが回転を開始することにより、用紙Pが2次転写部17Aに給紙され、用紙P上にカラートナー像が転写される(2次転写)。
カラートナー像が転写された用紙Pは、定着装置19において加熱及び加圧され、用紙P上にカラートナー像が定着される。カラートナー像が定着された用紙Pは、排紙ローラ204に搬送されて機外の排紙トレイ205上に排紙される。
一方、2次転写部17Aにより用紙Pにカラートナー像を転写した後、用紙Pを曲率分離した中間転写体16は、中間転写体クリーニング部18Aにより残留トナーが除去される。
なお、以上はカラー画像を形成する画像形成装置であったが、モノクロ画像を形成する画像形成装置であっても良い。
<第1の実施の形態の用紙搬送装置の動作例>
図5は、第1の実施の形態の用紙搬送装置の動作の一例を示すフローチャート、図6は、第1の実施の形態の用紙搬送装置における曲がり補正制御及びシワ補正制御の一例を示す動作説明図で、次に、各図を参照して第1の実施の形態の用紙搬送装置1A及び画像形成装置100Aの動作例について説明する。なお、図6において、用紙Pに対して従動ローラが圧着されている給紙ローラ対は実線で示し、従動ローラが離間して圧着が解除されている給紙ローラ対は模式的に破線で示している。
用紙搬送装置1Aは、上述したように画像形成装置100Aに組み込まれ、画像形成処理に先立って、制御部6は、ステップSA1の処理で、情報設定部7から紙情報を入手する。そして、制御部6は、ステップSA2の処理で、シワ補正制御後の従動ローラ21Rによる用紙Pの再圧着の有無を示す再圧着フラグNと、再圧着を行う場合のシワ補正時間Tを設定する。
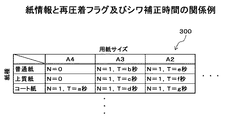
図7は、紙情報と再圧着フラグ及びシワ補正時間の関係の一例を示すテーブルの説明図である。テーブル300は、紙情報として設定される紙種と紙サイズに対応して、再圧着フラグNとシワ補正時間Tが設定される。図7では、再圧着フラグN=0は再圧着無、再圧着フラグN=1は再圧着有の設定である。また、再圧着フラグN=1の場合は、シワ補正時間Tが設定されている。制御部6は、情報設定部7から入手した紙情報に基づき、テーブル300を参照して再圧着フラグNとシワ補正時間Tを設定する。
用紙搬送装置1Aは、画像形成装置100Aの給紙トレイ200内に収容された用紙Pが、給紙部201の分離繰出ローラ202により1枚毎に分離され、給紙ローラ203によって検知センサ5に給紙される。
制御部6は、ステップSA3の処理で、搬送される用紙Pが曲がっているか否かを検知センサ5の出力から検知し、用紙Pが曲がっている場合は、用紙Pの曲がり量を検知する。
制御部6は、検知センサ5の出力から図6(a)に実線で示すように用紙Pが曲がっていると検知すると、ステップSA4の処理で、用紙Pの曲がりを補正する補正制御を行う。用紙Pの曲がり補正制御では、制御部6は、検知センサ5で検知された用紙Pの曲がり量に基づいて、用紙Pの曲がりを補正するために必要な給紙モータ3L及び給紙モータ3Rの駆動時間及び回転数等を設定する。
制御部6は、用紙Pの曲がり量に基づき設定された駆動時間及び回転数で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの回転速度に差を付けて駆動する。これにより、用紙Pにおいて駆動ローラ20Lによって搬送される搬送方向に対する左側と、駆動ローラ20Rによって搬送される右側で搬送量を異ならせて、図6(b)に二点鎖線で示す状態から、図6(b)に実線で示すように、用紙Pにおいて先行している側と遅延している側の先端位置を揃える。
制御部6は、検知センサ5で検知された用紙Pの曲がり量に基づいて給紙モータ3Lと給紙モータ3Rを制御して、用紙Pの曲がりを補正すると、給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの駆動を停止する。
用紙Pの曲がり補正制御では、用紙Pの幅方向において左右の両側に配置される駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて用紙Pを搬送することで、図6(b)に示すように、用紙Pは幅方向にシワPeが生じる。そこで、ステップSA5の処理で、用紙Pのシワを補正する補正制御を行う。
用紙Pのシワ補正制御では、制御部6は、圧着離間機構4Rを制御して、図2(b)に示すように従動ローラ21Rを用紙Pから離間させる。これにより、用紙Pは、給紙ローラ対2L側では、駆動ローラ20Lと従動ローラ21Lとの間に挟持されて圧着された状態が保持されると共に、給紙ローラ対2R側では、駆動ローラ20Rと従動ローラ21Rによる圧着が解除される。
曲がり補正制御で用紙Pに生じたシワPeは、従動ローラ21Rを用紙Pから離間させて、駆動ローラ20Rと従動ローラ21Rによる用紙Pの挟持を解除することで、用紙Pのコシによる復元力で伸ばされ、図6(c)に示すように、用紙Pはシワの無い平らな状態に戻される。
制御部6は、ステップSA6の処理で、再圧着フラグNが従動ローラ21Rによる再圧着有と設定されているか、再圧着無と設定されているかを判断する。
制御部6は、再圧着フラグNが従動ローラ21Rによる再圧着有と設定されていると、ステップSA7の処理で、紙情報に基づいて予め設定したシワ補正時間Tが経過した後、圧着離間機構4Rを制御して、従動ローラ21Rで用紙Pを駆動ローラ20Rに圧着する。
そして、制御部6は、ステップSA8の処理で、給紙ローラ対2Lと給紙ローラ対2Rの双方で駆動ローラ20L,20Rと従動ローラ21L,21Rにより用紙Pを挟持した状態で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rを同速度で駆動し、用紙Pを搬送する。
制御部6は、再圧着フラグNが従動ローラ21Rによる再圧着無と設定されていると、給紙ローラ対2Rによる圧着は解除した状態を保ち、ステップSA8の処理で、給紙ローラ対2Lで駆動ローラ20Lと従動ローラ21Lにより用紙Pを挟持した状態で給紙モータ3Lを制御して駆動ローラ20Lを駆動し、用紙Pを搬送する。
一般的に、用紙のサイズが小さい場合は、片側の給紙ローラ対だけで用紙を搬送しても、用紙の曲がりは発生し難い。一方、用紙のサイズが大きい場合は、片側の給紙ローラ対だけで用紙を搬送すると、用紙の曲がりが発生する可能性があり、両側の給紙ローラ対で用紙を搬送する必要がある。そこで、情報設定部7で設定される紙情報として、図7に示すように、用紙のサイズを設定できるようにして、例えば、用紙の大きさがA4であれば、再圧着フラグNで再圧着無と設定され、用紙の大きさがA3以上であれば、再圧着フラグNで再圧着有と設定される。また、用紙の表面が滑りやすいと、片側の給紙ローラ対だけで用紙を搬送すると、用紙の曲がりが発生する可能性があり、両側の給紙ローラ対で用紙を搬送する必要がある。そこで、情報設定部7で設定される紙情報として、図7に示すように、用紙の紙種を設定できるようにして、例えば、紙種がコート紙であれば、用紙の大きさがA4であっても、再圧着フラグNで再圧着有と設定される。
このように、シワ補正制御で用紙から離間させた従動ローラについて、用紙のサイズ及び紙種に応じて再圧着の有無が設定されることで、曲がり補正制御及びシワ補正制御で曲がり及びシワが補正された用紙が、再度曲がって搬送されることを防ぐことができる。また、再圧着が不要な用紙では再圧着の動作を省略することで、処理時間を短縮することができる。なお、シワ補正制御後の従動ローラの再圧着の有無の設定は、図7に示すようなテーブルでも良いし、補正量を決めておいてこれを利用しても良い。また、シワ補正制御後の従動ローラの再圧着の有無を、紙種等によらずどちらか一方に固定しても良い。
図4で説明した画像形成装置100Aでは、中間転写体16上のトナー像との位置が一致するタイミングで、再圧着フラグNに基づいて駆動ローラ20Lまたは駆動ローラ20L,20Rが回転を開始することにより、用紙Pが2次転写部17Aに給紙される。
<第2の実施の形態の用紙搬送装置の構成例>
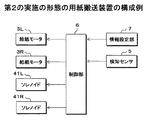
図8及び図9は、第2の実施の形態の用紙搬送装置の一例を示す構成図で、図8(a)は、第2の実施の形態の用紙搬送装置を駆動ローラの側から見た模式的な平面図、図8(b)は、第2の実施の形態の用紙搬送装置を従動ローラの側から見た模式的な平面図である。また、図9(a),図9(b)は、第2の実施の形態の用紙搬送装置を用紙の搬送方向に対する一の側方から見た模式的な側面図である。また、図10は、第2の実施の形態の用紙搬送装置の制御系の一例を示す機能ブロック図である。
第2の実施の形態の用紙搬送装置1Bは、用紙Pを搬送する給紙ローラ対2L,2Rと、給紙ローラ対2L,2Rを独立して駆動する給紙モータ3L,3Rを備える。
給紙ローラ対2Lは、用紙Pの搬送方向に対して左側に配置され、給紙モータ3Lに駆動される駆動ローラ20Lと、駆動ローラ20Lに対向配置される従動ローラ21Lを備える。給紙ローラ対2Rは、用紙Pの搬送方向に対して右側に配置され、給紙モータ3Rに駆動される駆動ローラ20Rと、駆動ローラ20Rに対向配置される従動ローラ21Rを備える。
駆動ローラ20Lと駆動ローラ20Rは、独立した軸に支持されて同軸上に配置され、従動ローラ21Lと従動ローラ21Rは、独立した軸に支持されて同軸上に配置される。
駆動ローラ20Lは給紙モータ3Lの駆動力が伝達され、駆動ローラ20Rは給紙モータ3Rの駆動力が伝達されて、駆動ローラ20Lと駆動ローラ20Rは、独立して駆動が可能である。
用紙搬送装置1Bは、給紙ローラ対2L,2Rによる用紙Pの圧着及び圧着の解除を行う圧着離間機構4L,4Rを備える。圧着離間機構4Lは、給紙ローラ対2Lを構成する駆動ローラ20Lと従動ローラ21Lの何れか、本例では従動ローラ21Lを、用紙Pに対して圧着及び離間する方向に移動可能に支持する支持部材40Lを備える。また、圧着離間機構4Lは、従動ローラ21Lを用紙Pに対して圧着及び離間する方向に移動させるソレノイド及びバネ等を有した駆動部41Lを備える。
圧着離間機構4Rは、給紙ローラ対2Rを構成する駆動ローラ20Rと従動ローラ21Rのいずれか、本例では従動ローラ21Rを、用紙Pに対して圧着及び離間する方向に移動可能に支持する支持部材40Rを備える。また、圧着離間機構4Rは、従動ローラ21Rを用紙Pに対して圧着及び離間する方向に移動させるソレノイド及びバネ等を有した駆動部41Rを備える。
用紙搬送装置1Bは、用紙Pの曲がり量等を検知する検知センサ5を備える。検知センサ5は例えばラインセンサで構成され、検知センサ5の出力から、搬送される用紙Pが曲がっているか否か、及び用紙Pの側端位置等が検知される。また、用紙Pが曲がっている場合は、検知センサ5の出力から、用紙Pの曲がり量と曲がり方向が検知される。例えば、用紙Pの幅方向において左右のどちらが先行(遅延)しているか、及び左右の先行(遅延)量が検知される。
用紙搬送装置1Bは、検知センサ5の出力に基づいて、用紙Pの搬送制御を行う制御部6を備える。制御部6は、検知センサ5の出力から検知された用紙Pの曲がり量と曲がり方向に基づき給紙モータ3L及び給紙モータ3Rを制御して、用紙Pの曲がりを補正する曲がり補正制御を行う。また、検知センサ5の出力から検知された用紙Pの曲がり方向に基づき圧着離間機構4Lまたは圧着離間機構4Rを制御して、曲がり補正制御によって用紙Pに発生したシワを除去するシワ補正制御を行う。
用紙搬送装置1Bは、搬送される用紙Pの紙情報が設定される情報設定部7を備える。情報設定部7は、用紙Pのサイズ、紙種、坪量、紙目等の紙情報が操作者等によって予め設定され、設定された紙情報が図示しない記憶部に記憶される。
制御部6は、シワ補正制御で用紙Pから離間させる従動ローラ21Lまたは従動ローラ21Rによる用紙Pの再圧着の有無を示す再圧着フラグNと、再圧着を行う場合の離間時間であるシワ補正時間Tを、情報設定部7で設定された紙情報に基づいて設定する。
<第2の実施の形態の用紙搬送装置の動作例>
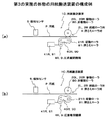
図11は、第2の実施の形態の用紙搬送装置の動作の一例を示すフローチャート、図12及び図13は、第2の実施の形態の用紙搬送装置における曲がり補正制御及びシワ補正制御の一例を示す動作説明図で、次に、各図を参照して第2の実施の形態の用紙搬送装置1B及び画像形成装置100Aの動作例について説明する。なお、図12及び図13において、用紙Pに対して従動ローラが圧着されている給紙ローラ対は実線で示し、従動ローラが離間して圧着が解除されている給紙ローラ対は模式的に破線で示している。
用紙搬送装置1Bは、図4で説明した画像形成装置100Aに組み込まれ、画像形成処理に先立って、制御部6は、ステップSB1の処理で、情報設定部7から紙情報を入手する。そして、制御部6は、ステップSB2の処理で、情報設定部7から入手した紙情報に基づき、図7に示すテーブル300を参照して再圧着フラグNとシワ補正時間Tを設定する。
用紙搬送装置1Bは、画像形成装置100Aの給紙トレイ200内に収容された用紙Pが、給紙部201の分離繰出ローラ202により1枚毎に分離され、給紙ローラ203によって検知センサ5に給紙される。
制御部6は、ステップSB3の処理で、搬送される用紙Pが曲がっているか否かを検知センサ5の出力から検知し、用紙Pが曲がっている場合は、用紙Pの曲がり量と曲がり方向を検知する。
制御部6は、ステップSB4の処理で、シワ補正制御で従動ローラ21Lと従動ローラ21Rのどちらを用紙Pから離間させて、給紙ローラ対による用紙Pに対する圧着を解除するか、検知センサ5で検知された用紙Pの曲がり方向に基づき選択する。
例えば、検知センサ5で検知された用紙Pの曲がり方向が、図12(a)に示すように、用紙Pの搬送方向に対して右側が先行する右先行の場合は、シワ補正制御で用紙Pに対する圧着を解除する従動ローラとして、従動ローラ21Rが選択される。一方、用紙Pの曲がり方向が、図13(a)に示すように左先行の場合は、シワ補正制御で用紙Pに対する圧着を解除する従動ローラとして、従動ローラ21Lが選択される。
制御部6は、検知センサ5の出力から用紙Pが曲がっていると検知すると、ステップSB5の処理で、用紙Pの曲がり補正制御を行う。用紙Pの曲がり補正制御では、制御部6は、検知センサ5で検知された用紙Pの曲がり量と曲がり方向に基づいて、用紙Pの曲がりを補正するために必要な給紙モータ3L及び給紙モータ3Rの駆動時間及び回転数等を設定する。
制御部6は、用紙Pの曲がり量と曲がり方向に基づき設定された駆動時間及び回転数で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの回転速度に差を付けて駆動する。これにより、用紙Pにおいて駆動ローラ20Lによって搬送される搬送方向に対する左側と、駆動ローラ20Rによって搬送される右側で搬送量を異ならせて、用紙Pにおいて先行している側と遅延している側の先端位置を揃える。
例えば、検知センサ5で検知された用紙Pの曲がり方向が、図12(a)に示すように右先行の場合は、用紙Pの先行している側の駆動ローラ20Rの駆動は停止し、用紙Pの遅延している側の駆動ローラ20Lを駆動する。または、駆動ローラ20Rを駆動ローラ20Lより低速で駆動する。これにより、駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて、図12(b)に二点鎖線で示す状態から、図12(b)に実線で示すように、用紙Pにおいて先行している右側の先端位置に遅延している左側の先端位置を揃える。
一方、検知センサ5で検知された用紙Pの曲がり方向が、図13(a)に示すように左先行の場合は、用紙Pの先行している側の駆動ローラ20Lの駆動は停止し、用紙Pの遅延している側の駆動ローラ20Rを駆動する。または、駆動ローラ20Lを駆動ローラ20Rより低速で駆動する。これにより、駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて、図13(b)に二点鎖線で示す状態から、図13(b)に実線で示すように、用紙Pにおいて先行している左側の先端位置に遅延している右側の先端位置を揃える。
制御部6は、検知センサ5で検知された用紙Pの曲がり量と曲がり方向に基づいて給紙モータ3Lと給紙モータ3Rを制御して、用紙Pの曲がりを補正すると、給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの駆動を停止する。
用紙Pの曲がり補正制御では、用紙Pの幅方向において左右の両側に配置される駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて用紙Pを搬送することで、図12(b)及び図13(b)に示すように、用紙Pは幅方向にシワPeが生じる。そこで、ステップSB6の処理で、用紙Pのシワを補正する補正制御を行う。
用紙Pのシワ補正制御では、制御部6は、検知センサ5で検知された用紙Pの曲がり方向に基づき上述したステップSB4の処理で選択された従動ローラを用紙Pから離間させて、曲がり補正制御によってシワが発生した側の従動ローラによる用紙Pに対する圧着を解除する。
例えば、検知センサ5で検知された用紙Pの曲がり方向が右先行であると、制御部6は、図12(b)に示すように圧着離間機構4Rを制御して、従動ローラ21Rを用紙Pから離間させる。これにより、用紙Pは、給紙ローラ対2L側では、駆動ローラ20Lと従動ローラ21Lとの間に挟持されて圧着された状態が保持されると共に、給紙ローラ対2R側では、駆動ローラ20Rと従動ローラ21Rによる圧着が解除される。
曲がり補正制御で用紙Pに生じたシワPeは、従動ローラ21Rを用紙Pから離間させて、駆動ローラ20Rと従動ローラ21Rによる用紙Pの挟持を解除することで、用紙Pのコシによる復元力で伸ばされ、図12(c)に示すように、用紙Pはシワの無い平らな状態に戻される。
一方、検知センサ5で検知された用紙Pの曲がり方向が左先行であると、制御部6は、図13(b)に示すように圧着離間機構4Lを制御して、従動ローラ21Lを用紙Pから離間させる。これにより、用紙Pは、給紙ローラ対2R側では、駆動ローラ20Rと従動ローラ21Rとの間に挟持されて圧着された状態が保持されると共に、給紙ローラ対2L側では、駆動ローラ20Lと従動ローラ21Lによる圧着が解除される。
曲がり補正制御で用紙Pに生じたシワPeは、従動ローラ21Lを用紙Pから離間させて、駆動ローラ20Lと従動ローラ21Lによる用紙Pの挟持を解除することで、用紙Pのコシによる復元力で伸ばされ、図13(c)に示すように、用紙Pはシワの無い平らな状態に戻される。
用紙Pの曲がり方向と、曲がり補正制御における用紙Pの搬送方法によっては、左右の何れかの従動ローラ対を用紙Pから離間できる構成の方が望ましい場合がある。そこで、第2の実施の形態の用紙搬送装置1Bでは、用紙Pの曲がり方向に応じて用紙Pから離間させる従動ローラ対を選択することで、様々な様態の用紙の曲がりに対応して曲がり補正を行うと共に、シワの除去を行うことができるようになる。
制御部6は、ステップSB7の処理で、再圧着フラグNが従動ローラ21Lまたは従動ローラ21Rによる再圧着有と設定されているか、再圧着無と設定されているかを判断する。
制御部6は、再圧着フラグNが再圧着有と設定されていると、ステップSB8の処理で、紙情報に基づいて予め設定したシワ補正時間Tが経過した後、圧着離間機構を制御して、従動ローラで用紙Pを給紙ローラに圧着する。
用紙Pの曲がり方向が右先行であった場合は、シワ補正時間Tが経過した後、圧着離間機構4Rを制御して、従動ローラ21Rで用紙Pを駆動ローラ20Rに圧着する。一方、用紙Pの曲がり方向が左先行であった場合は、シワ補正時間Tが経過した後、圧着離間機構4Lを制御して、従動ローラ21Lで用紙Pを駆動ローラ20Lに圧着する。
そして、制御部6は、ステップSB9の処理で、給紙ローラ対2Lと給紙ローラ対2Rの双方で駆動ローラ20L,20Rと従動ローラ21L,21Rにより用紙Pを挟持した状態で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rを同速度で駆動し、用紙Pを搬送する。
制御部6は、再圧着フラグNが従動ローラによる再圧着無と設定されていると、シワ補正制御で圧着が解除されていない給紙ローラ対で用紙Pを搬送する。
用紙Pの曲がり方向が右先行であった場合は、シワ補正制御で圧着が解除された従動ローラ21Rの再圧着動作は行わず、ステップSB9の処理で、給紙ローラ対2Lで駆動ローラ20Lと従動ローラ21Lにより用紙Pを挟持した状態で給紙モータ3Lを制御して駆動ローラ20Lを駆動し、用紙Pを搬送する。一方、用紙Pの曲がり方向が左先行であった場合は、シワ補正制御で圧着が解除された従動ローラ21Lの再圧着動作は行わず、ステップSB9の処理で、給紙ローラ対2Rで駆動ローラ20Rと従動ローラ21Rにより用紙Pを挟持した状態で給紙モータ3Rを制御して駆動ローラ20Rを駆動し、用紙Pを搬送する。
画像形成装置100Aでは、中間転写体16上のトナー像との位置が一致するタイミングで、再圧着フラグNに基づいて駆動ローラ20Lまたは駆動ローラ20R、あるいは駆動ローラ20Lと駆動ローラ20Rの双方が回転を開始することにより、用紙Pが2次転写部17Aに給紙される。
<第3の実施の形態の用紙搬送装置の構成例>
図14及び図15は、第3の実施の形態の用紙搬送装置の一例を示す構成図で、図14(a)は、第3の実施の形態の用紙搬送装置を駆動ローラの側から見た模式的な平面図、図14(b)は、第3の実施の形態の用紙搬送装置を従動ローラの側から見た模式的な平面図である。また、図15(a),図15(b)は、第3の実施の形態の用紙搬送装置を用紙の搬送方向に対する一の側方から見た模式的な側面図である。また、図16は、第3の実施の形態の用紙搬送装置の制御系の一例を示す機能ブロック図である。
第3の実施の形態の用紙搬送装置1Cは、第1の実施の形態の用紙搬送装置1Aにおいて、給紙ローラ対2L,2Rの間に、用紙Pに対する圧着を解除可能な押さえローラ対8を備える。なお、第3の実施の形態の用紙搬送装置1Cにおいて、押さえローラ対8及び押さえローラ対8に関連する構成以外は、第1の実施の形態の用紙搬送装置1Aと同じ構成であるので、同じ番号を付して詳細な説明は省略する。
押さえローラ対8は、用紙Pの搬送方向に対して中央に配置される非駆動ローラ80と、非駆動ローラ80に対向配置される押さえローラ81を備える。非駆動ローラ80は、駆動ローラ20L及び駆動ローラ20Rと独立した軸に支持されて同軸上に配置される。また、押さえローラ81は、従動ローラ21L及び従動ローラ21Rと独立した軸に支持されて同軸上に配置される。
用紙搬送装置1Cは、押さえローラ対8による用紙Pの挟持及び挟持の解除を行う圧着離間機構9を備える。圧着離間機構9は、押さえローラ対8を構成する非駆動ローラ80と押さえローラ81の何れか、本例では押さえローラ81を、用紙Pに対して圧着及び離間する方向に移動可能に支持する支持部材90を備える。また、圧着離間機構9は、押さえローラ81を用紙Pに対して圧着及び離間する方向に移動させるソレノイド及びバネ等を有した駆動部91を備える。
<第3の実施の形態の用紙搬送装置の動作例>
図17は、第3の実施の形態の用紙搬送装置の動作の一例を示すフローチャート、図18は、第3の実施の形態の用紙搬送装置における曲がり補正制御及びシワ補正制御の一例を示す動作説明図で、次に、各図を参照して第3の実施の形態の用紙搬送装置1C及び画像形成装置100Aの動作例について説明する。なお、図18において、用紙Pに対して従動ローラが圧着されている給紙ローラ対及び押さえローラが圧着されている押さえローラ対は実線で示し、従動ローラが離間して圧着が解除されている給紙ローラ対及び押さえローラが離間して圧着が解除されている押さえローラ対は模式的に破線で示している。
用紙搬送装置1Cは、図4で説明した画像形成装置100Aに組み込まれ、画像形成処理に先立って、制御部6は、ステップSC1の処理で、情報設定部7から紙情報を入手する。そして、制御部6は、ステップSC2の処理で、情報設定部7から入手した紙情報に基づき、図7に示すテーブル300を参照して再圧着フラグNとシワ補正時間Tを設定する。
用紙搬送装置1Cは、画像形成装置100Aの給紙トレイ200内に収容された用紙Pが、給紙部201の分離繰出ローラ202により1枚毎に分離され、給紙ローラ203によって検知センサ5に給紙される。ここで、画像形成装置100Aの給紙トレイ200から用紙Pを給紙する工程では、圧着離間機構9を制御して押さえローラ81を用紙Pに対して離間する位置に退避させ、押さえローラ対8では用紙Pが挟持されない状態とする。
制御部6は、ステップSC3の処理で、搬送される用紙Pが曲がっているか否かを検知センサ5の出力から検知し、用紙Pが曲がっている場合は、用紙Pの曲がり量を検知する。
制御部6は、検知センサ5の出力から図18(a)に示すように用紙Pが曲がっていると検知すると、ステップSC4の処理で、用紙Pの曲がりを補正する補正制御を行う。用紙Pの曲がり補正制御では、制御部6は、検知センサ5で検知された用紙Pの曲がり量に基づいて、用紙Pの曲がりを補正するために必要な給紙モータ3L及び給紙モータ3Rの駆動時間及び回転数等を設定する。
制御部6は、用紙Pの曲がり量に基づき設定された駆動時間及び回転数で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの回転速度に差を付けて駆動する。これにより、用紙Pにおいて駆動ローラ20Lによって搬送される搬送方向に対する左側と、駆動ローラ20Rによって搬送される右側で搬送量を異ならせて、図18(b)に二点鎖線で示す状態から、図18(b)に実線で示すように、用紙Pにおいて先行している側と遅延している側の先端位置を揃える。
制御部6は、検知センサ5で検知された用紙Pの曲がり量に基づいて給紙モータ3Lと給紙モータ3Rを制御して、用紙Pの曲がりを補正すると、給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの駆動を停止する。
用紙Pの曲がり補正制御では、用紙Pの幅方向において左右の両側に配置される駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて用紙Pを搬送することで、図18(b)に示すように、用紙Pは幅方向にシワPeが生じる。そこで、ステップSC5の処理で、用紙Pのシワを補正する補正制御を行う。
用紙Pのシワ補正制御では、制御部6は、圧着離間機構4Rを制御して、従動ローラ21Rを用紙Pから離間させる。これにより、用紙Pは、給紙ローラ対2L側では、駆動ローラ20Lと従動ローラ21Lとの間に挟持されて圧着された状態が保持されると共に、給紙ローラ対2R側では、駆動ローラ20Rと従動ローラ21Rによる圧着が解除される。
制御部6は、従動ローラ21Rによる用紙Pの圧着を解除すると、ステップSC6の処理で、用紙Pから離間している押さえローラ81を、圧着離間機構9を制御して用紙Pに圧着させ、用紙Pを非駆動ローラ80と押さえローラ81との間に挟持する。
これにより、曲がり補正制御で用紙Pに発生したシワPeは、用紙Pのコシによる復元力と、曲がり補正制御でシワが発生しやすい用紙Pの中央付近を押さえローラ対8で押さえることで伸ばされ、図18(c)に示すように、用紙Pはシワの無い平らな状態に戻される。
制御部6は、ステップSC7の処理で、再圧着フラグNが従動ローラ21Rによる再圧着有と設定されているか、再圧着無と設定されているかを判断する。
制御部6は、再圧着フラグNが従動ローラ21Rによる再圧着有と設定されていると、ステップSC8の処理で、紙情報に基づいて予め設定したシワ補正時間Tが経過した後、圧着離間機構4Rを制御して、従動ローラ21Rで用紙Pを駆動ローラ20Rに圧着する。
そして、制御部6は、ステップSC9の処理で、給紙ローラ対2Lと給紙ローラ対2Rの双方で駆動ローラ20L,20Rと従動ローラ21L,21Rにより用紙Pを挟持した状態で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rを同速度で駆動し、用紙Pを搬送する。
制御部6は、再圧着フラグNが従動ローラ21Rによる再圧着無と設定されていると、ステップSC9の処理で、給紙ローラ対2Lで駆動ローラ20Lと従動ローラ21Lにより用紙Pを挟持した状態で給紙モータ3Lを制御して駆動ローラ20Lを駆動し、用紙Pを搬送する。なお、シワ補正制御後に用紙Pを搬送する工程では、圧着離間機構9を制御して押さえローラ81を用紙Pから離間させ、非駆動ローラ80と押さえローラ81による挟持を解除しても良い。
画像形成装置100Aでは、中間転写体16上のトナー像との位置が一致するタイミングで、再圧着フラグNに基づいて駆動ローラ20Lまたは駆動ローラ20L,20Rが回転を開始することにより、用紙Pが2次転写部17Aに給紙される。
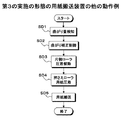
<第3の実施の形態の用紙搬送装置の他の動作例>
図19は、第3の実施の形態の用紙搬送装置の動作の他の例を示すフローチャートで、次に、各図を参照して第3の実施の形態の用紙搬送装置1C及び画像形成装置100Aの他の動作例について説明する。
用紙搬送装置1Cは、画像形成装置100Aの給紙トレイ200内に収容された用紙Pが、給紙部201の分離繰出ローラ202により1枚毎に分離され、給紙ローラ203によって検知センサ5に給紙される。ここで、画像形成装置100Aの給紙トレイ200から用紙Pを給紙する工程では、圧着離間機構9を制御して押さえローラ81を用紙Pに対して離間する位置に退避させ、押さえローラ対8では用紙Pが挟持されない状態とする。
制御部6は、ステップSD1の処理で、搬送される用紙Pが曲がっているか否かを検知センサ5の出力から検知し、用紙Pが曲がっている場合は、用紙Pの曲がり量を検知する。
制御部6は、検知センサ5の出力から用紙Pが曲がっていると検知すると、ステップSD2の処理で、用紙Pの曲がりを補正する補正制御を行う。用紙Pの曲がり補正制御では、制御部6は、検知センサ5で検知された用紙Pの曲がり量に基づいて、用紙Pの曲がりを補正するために必要な給紙モータ3L及び給紙モータ3Rの駆動時間及び回転数等を設定する。
制御部6は、用紙Pの曲がり量に基づき設定された駆動時間及び回転数で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの回転速度に差を付けて駆動する。これにより、用紙Pにおいて駆動ローラ20Lによって搬送される搬送方向に対する左側と、駆動ローラ20Rによって搬送される右側で搬送量を異ならせて、用紙Pにおいて先行している側と遅延している側の先端位置を揃える。
制御部6は、検知センサ5で検知された用紙Pの曲がり量に基づいて給紙モータ3Lと給紙モータ3Rを制御して、用紙Pの曲がりを補正すると、給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの駆動を停止する。
用紙Pの曲がり補正制御では、用紙Pの幅方向において左右の両側に配置される駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて用紙Pを搬送することで、用紙Pは幅方向にシワが生じる。そこで、ステップSD3の処理で、用紙Pのシワを補正する補正制御を行う。
用紙Pのシワ補正制御では、制御部6は、圧着離間機構4Rを制御して、従動ローラ21Rを用紙Pから離間させる。これにより、用紙Pは、給紙ローラ対2L側では、駆動ローラ20Lと従動ローラ21Lとの間に挟持された状態が保持されると共に、給紙ローラ対2R側では、駆動ローラ20Rと従動ローラ21Rによる挟持が解除される。
制御部6は、従動ローラ21Rによる用紙Pの圧着を解除すると、ステップSD4の処理で、用紙Pから離間している押さえローラ81を、圧着離間機構9を制御して用紙Pに圧着させ、用紙Pを非駆動ローラ80と押さえローラ81との間に挟持する。
これにより、曲がり補正制御で用紙Pに発生したシワは、用紙Pのコシによる復元力と、曲がり補正制御でシワが発生しやすい用紙Pの中央付近を押さえローラ対8で押さえることで伸ばされ、用紙Pはシワの無い平らな状態に戻される。
制御部6は、シワ補正制御で押さえローラ対8により用紙Pを挟持すると、給紙ローラ対2Lで駆動ローラ20Lと従動ローラ21Lにより用紙Pを挟持した状態で、給紙モータ3Lを制御して駆動ローラ20Lを駆動し、用紙Pを搬送する。シワ補正制御で従動ローラ21Rを用紙Pから離間させたことで、シワ補正制御後の用紙Pの搬送工程では、給紙ローラ対2Rの側では駆動ローラ20Lと従動ローラ21Rにより用紙Pが挟持されていない。ただし、押さえローラ対8で非駆動ローラ80と押さえローラ81で用紙Pを挟持することで、用紙Pの搬送を安定して行える。
画像形成装置100Aでは、中間転写体16上のトナー像との位置が一致するタイミングで、再圧着フラグNに基づいて駆動ローラ20Lが回転を開始することにより、用紙Pが2次転写部17Aに給紙される。
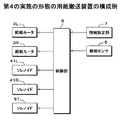
<第4の実施の形態の用紙搬送装置の構成例>
図20及び図21は、第4の実施の形態の用紙搬送装置の一例を示す構成図で、図20(a)は、第4の実施の形態の用紙搬送装置を駆動ローラの側から見た模式的な平面図、図20(b)は、第4の実施の形態の用紙搬送装置を従動ローラの側から見た模式的な平面図である。また、図21(a),図21(b)は、第4の実施の形態の用紙搬送装置を用紙の搬送方向に対する一の側方から見た模式的な側面図である。また、図22は、第4の実施の形態の用紙搬送装置の制御系の一例を示す機能ブロック図である。
第4の実施の形態の用紙搬送装置1Dは、第2の実施の形態の用紙搬送装置1Bにおいて、給紙ローラ対2L,2Rの間に、用紙Pに対する圧着を解除可能な押さえローラ対8を備える。なお、第4の実施の形態の用紙搬送装置1Dにおいて、押さえローラ対8及び押さえローラ対8に関連する構成以外は、第2の実施の形態の用紙搬送装置1Bと同じ構成であるので、同じ番号を付して詳細な説明は省略する。
押さえローラ対8は、用紙Pの搬送方向に対して中央に配置される非駆動ローラ80と、非駆動ローラ80に対向配置される押さえローラ81を備える。非駆動ローラ80は、駆動ローラ20L及び駆動ローラ20Rと独立した軸に支持されて同軸上に配置される。また、押さえローラ81は、従動ローラ21L及び従動ローラ21Rと独立した軸に支持されて同軸上に配置される。
用紙搬送装置1Dは、押さえローラ対8による用紙Pの挟持及び挟持の解除を行う圧着離間機構9を備える。圧着離間機構9は、押さえローラ対8を構成する非駆動ローラ80と押さえローラ81のいずれか、本例では押さえローラ81を、用紙Pに対して圧着及び離間する方向に移動可能に支持する支持部材90を備える。また、圧着離間機構9は、押さえローラ81を用紙Pに対して圧着及び離間する方向に移動させるソレノイド及びバネ等を有した駆動部91を備える。
<第4の実施の形態の用紙搬送装置の動作例>
図23は、第4の実施の形態の用紙搬送装置の動作の一例を示すフローチャート、図24及び図25は、第4の実施の形態の用紙搬送装置における曲がり補正制御及びシワ補正制御の一例を示す動作説明図で、次に、各図を参照して第4の実施の形態の用紙搬送装置1D及び画像形成装置100Aの動作例について説明する。なお、図24及び図25において、用紙Pに対して従動ローラが圧着されている給紙ローラ対及び押さえローラが圧着されている押さえローラ対は実線で示し、従動ローラが離間して圧着が解除されている給紙ローラ対及び押さえローラが離間して圧着が解除されている押さえローラ対は模式的に破線で示している。
用紙搬送装置1Dは、画像形成装置100Aの給紙トレイ200内に収容された用紙Pが、給紙部201の分離繰出ローラ202により1枚毎に分離され、給紙ローラ203によって検知センサ5に給紙される。ここで、画像形成装置100Aの給紙トレイ200から用紙Pを給紙する工程では、圧着離間機構9を制御して押さえローラ81を用紙Pに対して離間する位置に退避させ、押さえローラ対8では用紙Pが挟持されない状態とする。
制御部6は、ステップSE1の処理で、搬送される用紙Pが曲がっているか否かを検知センサ5の出力から検知し、用紙Pが曲がっている場合は、用紙Pの曲がり量と曲がり方向を検知する。
制御部6は、ステップSE2の処理で、シワ補正制御で従動ローラ21Lと従動ローラ21Rのどちらを用紙Pから離間させて、用紙Pに対する圧着を解除するか、検知センサ5で検知された用紙Pの曲がり方向に基づき選択する。
例えば、検知センサ5で検知された用紙Pの曲がり方向が、図24(a)に示すように、用紙Pの搬送方向に対して右側が先行する右先行の場合は、シワ補正制御で用紙Pに対する圧着を解除する従動ローラとして、従動ローラ21Rが選択される。一方、用紙Pの曲がり方向が、図25(a)に示すように左先行の場合は、シワ補正制御で用紙Pに対する圧着を解除する従動ローラとして、従動ローラ21Lが選択される。
制御部6は、検知センサ5の出力から用紙Pが曲がっていると検知すると、ステップSE3の処理で、用紙Pの曲がり補正制御を行う。用紙Pの曲がり補正制御では、制御部6は、検知センサ5で検知された用紙Pの曲がり量と曲がり方向に基づいて、用紙Pの曲がりを補正するために必要な給紙モータ3L及び給紙モータ3Rの駆動時間及び回転数等を設定する。
制御部6は、用紙Pの曲がり量と曲がり方向に基づき設定された駆動時間及び回転数で給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの回転速度に差を付けて駆動する。これにより、用紙Pにおいて駆動ローラ20Lによって搬送される搬送方向に対する左側と、駆動ローラ20Rによって搬送される右側で搬送量を異ならせて、用紙Pにおいて先行している側と遅延している側の先端位置を揃える。
例えば、検知センサ5で検知された用紙Pの曲がり方向が、図24(a)に示すように右先行の場合は、用紙Pの先行している側の駆動ローラ20Rの駆動は停止し、用紙Pの遅延している側の駆動ローラ20Lを駆動する。または、駆動ローラ20Rを駆動ローラ20Lより低速で駆動する。これにより、駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて、図24(b)に二点鎖線で示す状態から、図24(b)に実線で示すように、用紙Pにおいて先行している右側の先端位置に遅延している左側の先端位置を揃える。
一方、検知センサ5で検知された用紙Pの曲がり方向が、図25(a)に示すように左先行の場合は、用紙Pの先行している側の駆動ローラ20Lの駆動は停止し、用紙Pの遅延している側の駆動ローラ20Rを駆動する。または、駆動ローラ20Lを駆動ローラ20Rより低速で駆動する。これにより、駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて、図25(b)に二点鎖線で示す状態から、図25(b)に実線で示すように、用紙Pにおいて先行している左側の先端位置に遅延している右側の先端位置を揃える。
制御部6は、検知センサ5で検知された用紙Pの曲がり量と曲がり方向に基づいて給紙モータ3Lと給紙モータ3Rを制御して、用紙Pの曲がりを補正すると、給紙モータ3Lと給紙モータ3Rを制御して、駆動ローラ20Lと駆動ローラ20Rの駆動を停止する。
用紙Pの曲がり補正制御では、用紙Pの幅方向において左右の両側に配置される駆動ローラ20Lと駆動ローラ20Rによる搬送量に差を付けて用紙Pを搬送することで、図24(b)及び図25(b)に示すように、用紙Pは幅方向にシワPeが生じる。そこで、ステップSE4の処理で、用紙Pのシワを補正する補正制御を行う。
用紙Pのシワ補正制御では、制御部6は、検知センサ5で検知された用紙Pの曲がり方向に基づき上述したステップSE2の処理で選択された従動ローラを用紙Pから離間させて、曲がり補正制御によってシワが発生した側の従動ローラによる用紙Pに対する圧着を解除する。
例えば、検知センサ5で検知された用紙Pの曲がり方向が右先行であると、制御部6は、図24(b)に示すように圧着離間機構4Rを制御して、従動ローラ21Rを用紙Pから離間させる。これにより、用紙Pは、給紙ローラ対2L側では、駆動ローラ20Lと従動ローラ21Lとの間に挟持されて圧着された状態が保持されると共に、給紙ローラ対2R側では、駆動ローラ20Rと従動ローラ21Rによる圧着が解除される。
一方、検知センサ5で検知された用紙Pの曲がり方向が左先行であると、制御部6は、図25(b)に示すように圧着離間機構4Lを制御して、従動ローラ21Lを用紙Pから離間させる。これにより、用紙Pは、給紙ローラ対2R側では、駆動ローラ20Rと従動ローラ21Rとの間に挟持されて圧着された状態が保持されると共に、給紙ローラ対2L側では、駆動ローラ20Lと従動ローラ21Lによる圧着が解除される。
制御部6は、用紙Pの曲がり方向に基づき従動ローラ21Lまたは従動ローラ21Rによる用紙Pの圧着を解除すると、ステップSE5の処理で、用紙Pから離間している押さえローラ81を、圧着離間機構9を制御して用紙Pに圧着させ、用紙Pを非駆動ローラ80と押さえローラ81との間に挟持する。
これにより、曲がり補正制御で用紙Pに発生したシワPeは、用紙Pのコシによる復元力と、曲がり補正制御でシワが発生しやすい用紙Pの中央付近を押さえローラ対8で押さえることで伸ばされ、図24(c)及び図25(c)に示すように、用紙Pはシワの無い平らな状態に戻される。
制御部6は、シワ補正制御で押さえローラ対8により用紙Pを挟持すると、ステップSE6の処理で、給紙ローラ対2Lまたは給紙ローラ対2Rで駆動ローラと従動ローラにより用紙Pを挟持した状態で、給紙モータ3Lまたは給紙モータ3Rを制御して駆動ローラ20Lまたは駆動ローラ20Rを駆動し、用紙Pを搬送する。シワ補正制御で従動ローラ21Lまたは従動ローラ21Rを用紙Pから離間させたことで、シワ補正制御後の用紙Pの搬送工程では、一方の給紙ローラ対の側では駆動ローラと従動ローラにより用紙Pが挟持されていない。ただし、押さえローラ対8で非駆動ローラ80と押さえローラ81で用紙Pを挟持することで、用紙Pの搬送を安定して行える。
画像形成装置100Aでは、中間転写体16上のトナー像との位置が一致するタイミングで、再圧着フラグNに基づいて駆動ローラ20Lまたは駆動ローラ20R、あるいは駆動ローラ20Lと駆動ローラ20Rの双方が回転を開始することにより、用紙Pが2次転写部17Aに給紙される。
1A〜1D・・・用紙搬送装置、2L,2R・・・給紙ローラ対、20L,20R・・・駆動ローラ、21L,21R・・・従動ローラ、3L,3R・・・給紙モータ、4L,4R・・・圧着離間機構、5・・・検知センサ、6・・・制御部、7・・・情報設定部、8・・・押さえローラ対、80・・・非駆動ローラ、81・・・押さえローラ、9・・・圧着離間機構