JP2010032515A - サンプル管ラックの取扱方法およびその実験室システム - Google Patents
サンプル管ラックの取扱方法およびその実験室システム Download PDFInfo
- Publication number
- JP2010032515A JP2010032515A JP2009172309A JP2009172309A JP2010032515A JP 2010032515 A JP2010032515 A JP 2010032515A JP 2009172309 A JP2009172309 A JP 2009172309A JP 2009172309 A JP2009172309 A JP 2009172309A JP 2010032515 A JP2010032515 A JP 2010032515A
- Authority
- JP
- Japan
- Prior art keywords
- storage rack
- storage
- rack
- shelf
- transfer system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0418—Plate elements with several rows of samples
- G01N2035/042—Plate elements with several rows of samples moved independently, e.g. by fork manipulator
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0418—Plate elements with several rows of samples
- G01N2035/0422—Plate elements with several rows of samples carried on a linear conveyor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0418—Plate elements with several rows of samples
- G01N2035/0425—Stacks, magazines or elevators for plates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0474—Details of actuating means for conveyors or pipettes
- G01N2035/0482—Transmission
- G01N2035/0484—Belt or chain
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/025—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations having a carousel or turntable for reaction cells or cuvettes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/026—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations having blocks or racks of reaction cells or cuvettes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/028—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations having reaction cells in the form of microtitration plates
Abstract
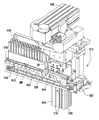
【解決手段】該実験室システムは、複数の収納ラックSRを収納するための複数の棚を持った収納部分と、該収納ラックSRからサンプル管を処分するための廃棄ユニットと、該収納部分中に、収納ラックSRを搭載するための、該収納部分から収納ラックSRを取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニットに持ってくるためのロボット移送システム510とを含む。
【選択図】図5
Description
18 廃棄ユニット
94 対応する開口部
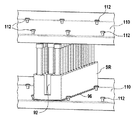
110 棚
112 T−ピン
510 ロボット移送システム
518 台
526 連結素子
528 センサー
620 傾斜モジュール
622 ラック停止位置
640、642 廃棄容器
650 傾向板
Claims (13)
- −複数の収納ラック(SR)を収納するための複数の棚(110)を持った収納部分(14)と、該収納ラック(SR)からサンプル管を処分するための廃棄ユニット(18)と、
−該収納部分(14)中に、収納ラック(SR)を搭載するための、該収納部分(14)から収納ラック(SR)を取り出すための、および所定の収納時間が経過した後に収納ラックを、該廃棄ユニット(18)に持ってくるためのロボット移送システム(510)とから成っていることを特徴とする実験室サンプル管ラックの取扱用実験室システム。 - 該ロボット移送システム(510)は、搬送される収納ラック(SR)と連結するための連結素子(526)であって、そこに連結されるときに、収納ラック(SR)上に押し/引き力を移す連結素子(526)と、移送される収納ラック(SR)を運ぶための台(518)とを含み、該台(518)は、高さ調整装置に接続され、
収納ラック(SR)が該台(518)上に引かれる場合には、該高さ調整装置が棚レベルに関してわずかに該台(518)を引き下げ、また収納ラック(SR)が、台(518)から押される場合には、該高さ調整装置が、棚レベルに関してわずかに上に、該台(518)を引き上げることを特徴とする請求項1記載の実験室システム。 - 該連結素子(526)は、収納ラック(SR)の対応する開口部(94)と噛み合わせるためのL−形状のフックであることを特徴とする請求項2記載の実験室システム。
- 各棚110は、収納ラック(SR)用の受取仕切りを形成するように、また該棚(110)上へ摺動するときに収納ラック(SR)の適当なガイドを提供するように、棚(110)上に配列された複数のT−ピン(112)を含むことを特徴とする請求項1〜3のいずれか1項に記載の実験室システム。
- 該収納部分(14)の棚(110)は、収納位置中に十分に挿入された収納ラック(SR)を保持するための複数の高められた保持素子(114)からなる棚を含むことを特徴とする請求項1〜4のいずれか1項に記載の実験室システム。
- 該廃棄ユニット(18)は、廃棄容器(640、642)上に置かれたラック停止位置を持った傾斜モジュール(620)を含み、収納ラック(SR)中に含まれるサンプル管(S)が、下の廃棄容器(640、642)中に落ちるように、該傾斜モジュール(620)は、ロボット移送システム(510)によってラック停止位置(622)中に搭載される該収納ラック(SR)上に傾斜するように設計されていることを特徴とする請求項1〜5のいずれか1項に記載の実験室システム。
- 該ラック停止位置(622)は、収納ラック(SR)が傾斜モジュール(620)中に傾斜するときの位置において、収納ラック(SR)を保持するためのT−形状またはL−形状の断面を持ったガイド素子を含むことを特徴とする請求項6記載の実験室システム。
- 落下サンプル管(S)を廃棄容器(640、642)中に導くために、該傾斜モジュール(620)と該廃棄容器(640、642)の間に、偏向板(650)が置かれていることを特徴とする請求項6または7のいずれか1項に記載の実験室システム。
- 該ロボット移送システム(510)が、それ自身を測定することができる独習システムをさらに含み、該独習システムが、棚(110)に沿って定められた位置にマーキングを含むことを特徴とする請求項1〜8のいずれか1項に記載の実験室システム。
- 該ロボット移送システム(110)は、収納ラック(SR)中での存在および/またはサンプル管(S)の高さを感知するためのセンサー(528)を含むことを特徴とする請求項1〜9のいずれか1項に記載の実験室システム。
- 実験室システムの収納部分(14)であって、複数の収納ラック(SR)を収納するための複数の棚(110)を含む該収納部分(14)と、ゲートを経由して該収納部分(14)中に該収納ラック(SR)を搭載しまた該収納部分(14)から該収納ラック(SR)を取り出すためのロボット移送システム(510)とを操作する方法であって、初期操作の以下の工程;
−該ロボット移送システム(510)が、トップ棚または底棚の1つに向けて移動する;
−該ロボット移送システム(510)が、トップ棚または底棚の第1端に向けて移動しかつセンサーによって、第1収納ラック端位置を定める第1マーキングを同定する;
−ロボット移送システム(510)が、トップ棚または底棚に沿って反対の棚端に向けて移動しかつセンサーによって、第1および第2収納ラック端位置の間の距離を測定することにより、第2収納ラック端位置を定める第2マーキングを同定する;
−該ロボット移送システム(510)が、センサーによって、第2および第3収納ラック端位置の間の距離を測定することにより、それが、第3収納ラック端位置を定める第3マーキングを同定するまで、トップ棚または底棚の各他の1つに対して垂直に移動し;
−該ロボット移送システム(510)が、棚に沿って反対の棚端に向けて移動しかつセンサーによって、第3および第4収納ラック端位置の間の距離を測定することにより、第4収納ラック端位置を定める第4マーキングを同定する;
−該ロボット移送システム(510)のCPU中で、水平収納ラック端位置間の距離を、収納ラック位置の数で割ることにより、また垂直収納ラック端位置間の距離を、棚の数により割ることにより、各収納位置間の距離を計算する;ならびに
−4つの収納ラック端位置の絶対座標を蓄える工程を含むことを特徴とする方法。 - −複数の収納ラック(SR)を収納するための複数の棚(110)を持った収納部分(14)と、
−廃棄ユニット(18)と、
−ロボット移送システム(510)とから成っている実験室システム中の実験室サンプル管ラックの取扱方法であって、
a)ロボット移送システム(510)により、ゲートを経由して、収納ラック(SR)を、収納部分(14)中に搭載する工程と、
b)必要により、ゲートを経由して、ロボット移送システム(510)により、収納ラック(SR)を収納部分(14)から取り出す工程と、
c)所定の時間後に、ロボット移送システム(510)により、収納ラック(SR)を廃棄ユニット(18)中に持ち込む工程と、
d)廃棄ユニット(18)を経由して、サンプル管を廃棄する工程とから成ることを特徴とする方法。 - e)センサー(528)により、サンプル管(S)が、廃棄後の収納ラック(SR)中に、残存しているかどうかを感知する工程と、
f)収納ラック(SR)を停止位置に移送する工程および/または残ったサンプル管(S)を、異なった収納ラック(SR)に預けて、c)およびd)工程を反復する工程をさらに含んでいることを特徴とする請求項12記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08013460 | 2008-07-25 | ||
| EP08013460.4 | 2008-07-25 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010032515A true JP2010032515A (ja) | 2010-02-12 |
| JP2010032515A5 JP2010032515A5 (ja) | 2011-11-24 |
| JP5322819B2 JP5322819B2 (ja) | 2013-10-23 |
Family
ID=40243721
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009172309A Active JP5322819B2 (ja) | 2008-07-25 | 2009-07-23 | サンプル管ラックの取扱方法およびその実験室システム |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US8423174B2 (ja) |
| EP (1) | EP2148208B1 (ja) |
| JP (1) | JP5322819B2 (ja) |
| CN (2) | CN105116158B (ja) |
| CA (1) | CA2673499C (ja) |
| ES (1) | ES2582205T3 (ja) |
| HK (1) | HK1218158A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011102295A1 (ja) | 2010-02-17 | 2011-08-25 | 三菱重工業株式会社 | 溶接方法および超伝導加速器 |
| JP2015521737A (ja) * | 2012-06-25 | 2015-07-30 | インペコ ホールディング リミテッドInpeco Holding Ltd. | 実験室自動化システムと連携する生体製品容器の保存用ストレージから搬出された生体製品容器を収容するマルチラック装置 |
| JP2017009604A (ja) * | 2015-06-19 | 2017-01-12 | エフ.ホフマン−ラ ロシュ アーゲーF. Hoffmann−La Roche Aktiengesellschaft | 固体廃棄物の除去 |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2148204B1 (en) * | 2008-07-25 | 2013-01-02 | F. Hoffmann-La Roche AG | A laboratory storage and retrieval system and a method to handle laboratory sample tubes |
| ES2582205T3 (es) | 2008-07-25 | 2016-09-09 | F. Hoffmann-La Roche Ag | Método y sistema de laboratorio para manipular gradillas de tubos de muestra |
| JP5340975B2 (ja) * | 2010-01-29 | 2013-11-13 | 株式会社日立ハイテクノロジーズ | 自動分析装置 |
| DE102010016029A1 (de) * | 2010-03-19 | 2011-09-22 | LCTech GmbH | Robotiksystem |
| BR112014010955A2 (pt) * | 2011-11-07 | 2017-06-06 | Beckman Coulter Inc | sistema e método para processar amostras |
| BR112014011043A2 (pt) | 2011-11-07 | 2017-06-13 | Beckman Coulter Inc | detecção de recipiente de espécime |
| US9381524B2 (en) | 2011-11-08 | 2016-07-05 | Becton, Dickinson And Company | System and method for automated sample preparation |
| DE102012013022A1 (de) * | 2012-06-29 | 2014-04-24 | Liebherr-Verzahntechnik Gmbh | Vorrichtung zur automatisierten Handhabung von Werkstücken |
| CN102728428B (zh) * | 2012-07-21 | 2014-07-02 | 深圳市华测检测技术股份有限公司 | 试管废液自动收集设备 |
| US9619692B2 (en) * | 2012-09-24 | 2017-04-11 | Siemens Healthcare Diagnostics Inc. | Image capture-based predictive control device |
| US9535083B2 (en) | 2012-12-17 | 2017-01-03 | Beckman Coulter, Inc. | Method and system using sample processing system and storage units |
| GB2509758A (en) * | 2013-01-14 | 2014-07-16 | Stratec Biomedical Ag | A laboratory module for storing and moving samples |
| CA2903013C (en) | 2013-03-08 | 2021-05-11 | Siemens Healthcare Diagnostics Inc. | Tube characterization station |
| EP2804002B1 (en) | 2013-05-15 | 2019-09-25 | F. Hoffmann-La Roche AG | Laboratory automated system with common sample buffer module |
| TWI554453B (zh) * | 2013-07-26 | 2016-10-21 | 國璽幹細胞應用技術股份有限公司 | 具觀察組件之生物產品儲藏設備 |
| CN106170703B (zh) * | 2014-04-17 | 2017-12-29 | 深圳迈瑞生物医疗电子股份有限公司 | 样本架移动机构、样本架传送装置及样本分析设备 |
| RU2677987C2 (ru) * | 2014-05-28 | 2019-01-22 | Инпеко Холдинг Лтд. | Устройство для хранения и извлечения больших количеств пробирок |
| EP2952905A1 (en) * | 2014-06-06 | 2015-12-09 | Stratec Biomedical AG | Laboratory module for storing and feeding to further processing of samples |
| CN104588147B (zh) * | 2015-01-30 | 2016-06-15 | 上海创司杰医疗科技有限公司 | 采血管理系统所用的采血管架 |
| CN109414826B (zh) * | 2016-07-14 | 2022-02-22 | 西门子医疗保健诊断公司 | 用于基于样品架成像数据的动态拾取和放置选择顺序的方法、系统和装置 |
| EP3621741B1 (en) * | 2017-05-10 | 2022-12-28 | Siemens Healthcare Diagnostics Inc. | Sample rack for sample analysis system |
| WO2018208752A1 (en) * | 2017-05-10 | 2018-11-15 | Siemens Healthcare Diagnostics Inc. | Sample rack handler and rotation assembly for a sample analysis system |
| US11420820B2 (en) | 2017-05-12 | 2022-08-23 | Thermo Fisher Scientific Oy | Waste bin carrier and automated receptacle handling system |
| EP3415005B1 (en) * | 2017-06-16 | 2022-08-03 | Liconic Ag | Automatic blood bank |
| EP3474018B1 (en) * | 2017-10-18 | 2020-07-22 | Roche Diagnostics GmbH | A method to store sample tubes in a laboratory storage and retrieval system |
| EP3489694A1 (en) | 2017-11-24 | 2019-05-29 | Roche Diagnostics GmbH | Sample vessel and cap transportation |
| CN107867551A (zh) * | 2017-12-12 | 2018-04-03 | 上海高素自动控制系统有限公司 | 一种快速旋转落管装置 |
| EP4219014A1 (en) * | 2018-01-23 | 2023-08-02 | F. Hoffmann-La Roche AG | Tube tray for secondary tubes and secondary tube handling module |
| EP3746799B1 (en) | 2018-01-31 | 2024-04-03 | Laboratory Corporation of America Holdings | Sample sorting system, method of sorting samples and computer program product |
| EP3746226A4 (en) * | 2018-02-02 | 2021-11-10 | Thermo CRS Ltd. | AUTOMATED LABORATORY SYSTEM AND ASSOCIATED SYSTEMS, PROCESSES AND DEVICES |
| CN108273425B (zh) * | 2018-03-27 | 2021-04-09 | 吉林大学第一医院 | 一种医学试管混匀的一体化装置 |
| JP7325171B2 (ja) * | 2018-03-29 | 2023-08-14 | シスメックス株式会社 | ラックの搬送方法、検体測定システム |
| IT201800006485A1 (it) * | 2018-06-20 | 2019-12-20 | Apparecchiatura per estrarre contenitori farmaceutici, quali flaconi, da relativi elementi di supporto costituiti da un vassoio | |
| JP2020049642A (ja) * | 2018-09-28 | 2020-04-02 | セイコーエプソン株式会社 | 制御装置、ロボットシステム、及びロボット |
| CN109342222B (zh) * | 2018-11-07 | 2024-03-26 | 湖南科技大学 | 霍普金森压杆系统 |
| USD907987S1 (en) | 2019-03-07 | 2021-01-19 | Gen-Probe Incorporated | Serpentine retainer spring for a receptacle rack |
| CN113557434A (zh) | 2019-03-07 | 2021-10-26 | 简·探针公司 | 加工仪器中用于运输和保持消耗品的系统和方法 |
| USD907465S1 (en) | 2019-03-07 | 2021-01-12 | Gen-Probe Incorporated | Serpentine retainer spring for a receptacle rack |
| CN109985686A (zh) * | 2019-04-29 | 2019-07-09 | 迈克医疗电子有限公司 | 样本架和样本分析仪 |
| EP3882849A1 (en) * | 2020-03-16 | 2021-09-22 | F. Hoffmann-La Roche AG | Method for determining characteristics of a sample vessel in an in-vitro diagnostics system, analyzing device, and in-vitro diagnostics system |
| CN111637675B (zh) * | 2020-06-01 | 2021-06-04 | 迪瑞医疗科技股份有限公司 | 一种样本低温自动储存设备及方法 |
| CN112659570B (zh) * | 2021-01-08 | 2022-07-12 | 深圳市柏明胜医疗器械有限公司 | 一种采血试管自动化处理器械 |
| NO347211B1 (en) * | 2021-12-21 | 2023-07-10 | Autostore Tech As | Trash handling arrangement for an automated storage system |
| CN114225996B (zh) * | 2021-12-29 | 2024-04-16 | 南京红十字血液中心 | 一种试管收纳递送装置及系统 |
| CN114291469B (zh) * | 2021-12-29 | 2023-04-07 | 南昌大学第一附属医院 | 一种基于物联网技术的输血相容性检测标本智能管理设备 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63191942A (ja) * | 1987-02-04 | 1988-08-09 | Kurimoto Iron Works Ltd | 自動試料調製方法 |
| JPH06138132A (ja) * | 1992-10-22 | 1994-05-20 | Hitachi Ltd | 自動分析装置および検体検査自動化システム |
| JPH07287018A (ja) * | 1994-04-19 | 1995-10-31 | Hitachi Ltd | 試料管ラック識別装置 |
| JPH08254A (ja) * | 1994-06-22 | 1996-01-09 | Kirin Brewery Co Ltd | ローラボトルハンドリングシステム |
| JPH09211005A (ja) * | 1996-01-30 | 1997-08-15 | Olympus Optical Co Ltd | 検査用検体自動搬送システム |
| JP2000118616A (ja) * | 1998-10-19 | 2000-04-25 | Toyota Autom Loom Works Ltd | スタッカクレーンの制御方法、スタッカクレーン及び自動倉庫 |
| JP2001505518A (ja) * | 1995-10-10 | 2001-04-24 | オムニセル テクノロジーズ インコーポレイテッド | 薬剤分与装置および方法 |
| JP2008044732A (ja) * | 2006-08-17 | 2008-02-28 | Daifuku Co Ltd | 物品収納設備 |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4364907A (en) * | 1981-06-18 | 1982-12-21 | Eastman Kodak Company | Process for recovery of rhodium values |
| ES514124A0 (es) | 1981-07-20 | 1983-12-16 | American Hospital Supply Corp | Dispositivo de carga y transferencia para presentar a un analizador quimico recipientes de muestras de fluidos corporales y para retirarlos y alimentarlos seguidamente. |
| JPH07110654B2 (ja) * | 1988-06-17 | 1995-11-29 | 麒麟麦酒株式会社 | 容器供給装置 |
| US5143193A (en) * | 1988-06-30 | 1992-09-01 | Ronald Geraci | Automated library article terminal |
| US5056437A (en) * | 1990-05-15 | 1991-10-15 | Republic Storage Systems Company, Inc. | Device for initializing an automated warehousing system |
| DE4023149A1 (de) | 1990-07-20 | 1992-01-23 | Kodak Ag | Vorrichtung zum abtasten von behaeltern mit einer fluessigkeit |
| WO1995005590A1 (en) * | 1993-08-16 | 1995-02-23 | Akzo Nobel N.V. | Method and instrument for automatically performing analysis relating to thrombosis and hemostasis |
| JP2947146B2 (ja) * | 1995-09-29 | 1999-09-13 | 株式会社島津製作所 | オ−トサンプラ |
| US6129428A (en) | 1996-08-05 | 2000-10-10 | Kendro Laboratory Products Gmbh | Storage device for objects, storage station and air-conditioned cabinet |
| JP3032159B2 (ja) * | 1996-09-24 | 2000-04-10 | 株式会社日立製作所 | 分析システム |
| AUPP058197A0 (en) * | 1997-11-27 | 1997-12-18 | A.I. Scientific Pty Ltd | Pathology sample tube distributor |
| DE19819812C2 (de) * | 1998-05-04 | 2000-11-02 | Olympus Diagnostica Gmbh | Laborprimärprobenverteiler mit einer Verteileinrichtung |
| JP2000123448A (ja) | 1998-10-21 | 2000-04-28 | Nec Yonezawa Ltd | 磁気テープ装置 |
| US6068437A (en) * | 1998-11-24 | 2000-05-30 | Lab-Interlink | Automated laboratory specimen organizer and storage unit |
| FR2788042A1 (fr) * | 1999-01-04 | 2000-07-07 | Pierre Chaumat | Systeme modulaire automatique de stockage haute densite de microplaques en atmosphere controlee |
| CH690645C1 (de) | 1999-09-02 | 2002-08-30 | Liconic Ag | LAGERANLAGE UND LAGERBEHäLTNIS MIT LAGERANLAGE |
| JP2002002909A (ja) | 2000-06-19 | 2002-01-09 | Shinko Electric Co Ltd | ストッカ用ロボットの教示確認方法 |
| KR20030027965A (ko) * | 2000-08-23 | 2003-04-07 | 유니버시티 오브 버지니아 페이턴트 파운데이션 | 냉동기용 자동 저장 및 회수 장치와 그 관련 방법 |
| US20020064881A1 (en) * | 2000-11-30 | 2002-05-30 | Devlin William Jackson | Method for automatically storing and reprocessing patient specimen's in an automatic clinical analyzer |
| US6588625B2 (en) * | 2001-04-24 | 2003-07-08 | Abbott Laboratories | Sample handling system |
| JP3694490B2 (ja) | 2002-03-29 | 2005-09-14 | アロカ株式会社 | 検体前処理システム |
| JP3740428B2 (ja) | 2002-03-29 | 2006-02-01 | アロカ株式会社 | 検体前処理システム |
| JP2004075363A (ja) | 2002-08-21 | 2004-03-11 | Hitachi Koki Co Ltd | 自動保管装置 |
| JP3882714B2 (ja) * | 2002-08-21 | 2007-02-21 | 日立工機株式会社 | 自動保管装置 |
| AU2003287568A1 (en) | 2002-11-08 | 2004-06-03 | Irm, Llc | Systems and methods of sorting samples |
| US7314341B2 (en) * | 2003-01-10 | 2008-01-01 | Liconic Ag | Automatic storage device and climate controlled cabinet with such a device |
| EP1496365B1 (de) * | 2003-07-11 | 2014-06-04 | Tecan Trading AG | Vorrichtung und Verfahren zum Transportieren von Objekten |
| JP4047826B2 (ja) * | 2004-03-25 | 2008-02-13 | 東京エレクトロン株式会社 | 縦型熱処理装置及び移載機構の自動教示方法 |
| GB0415307D0 (en) * | 2004-07-08 | 2004-08-11 | Rts Thurnall Plc | Automated store |
| US20060013730A1 (en) * | 2004-07-16 | 2006-01-19 | Pollock Paul W | Method and apparatus for handling labware within a storage device |
| DE102004058216B4 (de) * | 2004-11-29 | 2007-08-02 | Topik Didaktik Gmbh | Kommissionieranordnung, insbesondere für eine Apotheke |
| KR101326384B1 (ko) * | 2005-06-30 | 2013-11-11 | 놀리텍 엘엘씨 | 모놀리식 이미지 인식 디바이스 및 방법 |
| FR2888328B1 (fr) * | 2005-07-08 | 2013-09-20 | Horiba Abx Sas | Procede automatise de preparation d'analyse d'echantillons de sang total et dispositif automatise pour sa mise en oeuvre |
| JP2007161453A (ja) * | 2005-12-15 | 2007-06-28 | Tsubakimoto Chain Co | 棚位置自動ティーチング装置 |
| CN101970115B (zh) * | 2006-01-23 | 2014-03-12 | 纽克塞斯生物系统公司 | 用于储藏、取回和管理样品的自动化系统 |
| US7708702B2 (en) * | 2006-01-26 | 2010-05-04 | Roche Diagnostics Operations, Inc. | Stack magazine system |
| CN101190525A (zh) * | 2006-11-22 | 2008-06-04 | 富士迈半导体精密工业(上海)有限公司 | 自动校正机械手臂 |
| EP1939561A3 (de) * | 2006-12-07 | 2008-07-23 | Tecan Trading AG | Kompaktlagersystem und dessen Verwendung |
| JP5056047B2 (ja) * | 2007-02-15 | 2012-10-24 | 富士通株式会社 | ライブラリ装置とその位置制御方法 |
| US8556564B2 (en) * | 2007-06-26 | 2013-10-15 | Siemens Healthcare Diagnostics Inc. | Mobile sample storage and retrieval unit for a laboratory automated sample handling worksystem |
| ITMI20072386A1 (it) * | 2007-12-19 | 2009-06-20 | Dachi S R L | "apparato di deposito, conservazione e recupero automatico di campioni di materiale biologico in un magazzino refrigerato" |
| EP2148204B1 (en) * | 2008-07-25 | 2013-01-02 | F. Hoffmann-La Roche AG | A laboratory storage and retrieval system and a method to handle laboratory sample tubes |
| ES2582205T3 (es) | 2008-07-25 | 2016-09-09 | F. Hoffmann-La Roche Ag | Método y sistema de laboratorio para manipular gradillas de tubos de muestra |
| US8176747B2 (en) * | 2008-07-31 | 2012-05-15 | Hamilton Storage Technologies, Inc. | Tube picking mechanism for an automated, ultra-low temperature storage and retrieval system |
-
2009
- 2009-07-17 ES ES09009330.3T patent/ES2582205T3/es active Active
- 2009-07-17 EP EP09009330.3A patent/EP2148208B1/en active Active
- 2009-07-21 CA CA2673499A patent/CA2673499C/en active Active
- 2009-07-23 JP JP2009172309A patent/JP5322819B2/ja active Active
- 2009-07-23 US US12/460,821 patent/US8423174B2/en active Active
- 2009-07-24 CN CN201510532141.2A patent/CN105116158B/zh active Active
- 2009-07-24 CN CN200910164939.0A patent/CN101632949A/zh active Pending
-
2012
- 2012-11-26 US US13/685,284 patent/US8694153B2/en active Active
-
2016
- 2016-05-30 HK HK16106079.3A patent/HK1218158A1/zh unknown
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63191942A (ja) * | 1987-02-04 | 1988-08-09 | Kurimoto Iron Works Ltd | 自動試料調製方法 |
| JPH06138132A (ja) * | 1992-10-22 | 1994-05-20 | Hitachi Ltd | 自動分析装置および検体検査自動化システム |
| JPH07287018A (ja) * | 1994-04-19 | 1995-10-31 | Hitachi Ltd | 試料管ラック識別装置 |
| JPH08254A (ja) * | 1994-06-22 | 1996-01-09 | Kirin Brewery Co Ltd | ローラボトルハンドリングシステム |
| JP2001505518A (ja) * | 1995-10-10 | 2001-04-24 | オムニセル テクノロジーズ インコーポレイテッド | 薬剤分与装置および方法 |
| JPH09211005A (ja) * | 1996-01-30 | 1997-08-15 | Olympus Optical Co Ltd | 検査用検体自動搬送システム |
| JP2000118616A (ja) * | 1998-10-19 | 2000-04-25 | Toyota Autom Loom Works Ltd | スタッカクレーンの制御方法、スタッカクレーン及び自動倉庫 |
| JP2008044732A (ja) * | 2006-08-17 | 2008-02-28 | Daifuku Co Ltd | 物品収納設備 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011102295A1 (ja) | 2010-02-17 | 2011-08-25 | 三菱重工業株式会社 | 溶接方法および超伝導加速器 |
| JP2015521737A (ja) * | 2012-06-25 | 2015-07-30 | インペコ ホールディング リミテッドInpeco Holding Ltd. | 実験室自動化システムと連携する生体製品容器の保存用ストレージから搬出された生体製品容器を収容するマルチラック装置 |
| EP2864796B1 (en) | 2012-06-25 | 2016-09-14 | Inpeco Holding Ltd | Multiple rack apparatus for accommodating biological product containers unloaded from a storage for the preservation of the same interfaced with a laboratory automation system |
| JP2017009604A (ja) * | 2015-06-19 | 2017-01-12 | エフ.ホフマン−ラ ロシュ アーゲーF. Hoffmann−La Roche Aktiengesellschaft | 固体廃棄物の除去 |
| US11385247B2 (en) | 2015-06-19 | 2022-07-12 | Roche Molecular Systems, Inc. | Solid waste removal |
Also Published As
| Publication number | Publication date |
|---|---|
| US8694153B2 (en) | 2014-04-08 |
| ES2582205T3 (es) | 2016-09-09 |
| CN101632949A (zh) | 2010-01-27 |
| CA2673499A1 (en) | 2010-01-25 |
| US20100049358A1 (en) | 2010-02-25 |
| EP2148208A3 (en) | 2010-05-19 |
| US20130085597A1 (en) | 2013-04-04 |
| CN105116158A (zh) | 2015-12-02 |
| JP5322819B2 (ja) | 2013-10-23 |
| HK1218158A1 (zh) | 2017-02-03 |
| CN105116158B (zh) | 2017-05-31 |
| CA2673499C (en) | 2015-12-29 |
| EP2148208B1 (en) | 2016-04-13 |
| EP2148208A2 (en) | 2010-01-27 |
| US8423174B2 (en) | 2013-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5322819B2 (ja) | サンプル管ラックの取扱方法およびその実験室システム | |
| JP5243364B2 (ja) | 研究室の保存・搬出システムおよび研究室試料試験管を取り扱う方法 | |
| EP2530025B1 (en) | Alignment element for sample tube racks | |
| JP4458577B2 (ja) | 容器供給のための分析機器用自動サンプルハンドラー | |
| EP2148205B1 (en) | A method and laboratory system for handling sample tubes and an image analysing unit | |
| ES2368672T3 (es) | Aparato para depositar , conservar y recuperar automáticamente muestras de material biológico en un depósito refrigerado. | |
| US10775400B2 (en) | Feeding apparatus | |
| JP2010531460A (ja) | ラボラトリー自動サンプル・ハンドリング・ワークシステムのための移動式サンプル保管・取出し装置 | |
| CN111637675B (zh) | 一种样本低温自动储存设备及方法 | |
| JP2010032515A5 (ja) | ||
| CN109414826B (zh) | 用于基于样品架成像数据的动态拾取和放置选择顺序的方法、系统和装置 | |
| US20230107207A1 (en) | Automatic device for the automated conduct of analyses, notably medical analyses | |
| CN218930612U (zh) | 标本储存库 | |
| CN115327141A (zh) | 样本处理装置及其控制方法、实验室系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20100525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111012 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111012 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130702 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130716 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5322819 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |