JP2010029991A - 物品移載用ロボット装置 - Google Patents
物品移載用ロボット装置 Download PDFInfo
- Publication number
- JP2010029991A JP2010029991A JP2008195526A JP2008195526A JP2010029991A JP 2010029991 A JP2010029991 A JP 2010029991A JP 2008195526 A JP2008195526 A JP 2008195526A JP 2008195526 A JP2008195526 A JP 2008195526A JP 2010029991 A JP2010029991 A JP 2010029991A
- Authority
- JP
- Japan
- Prior art keywords
- bucket
- robot
- article
- loading
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Manipulator (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
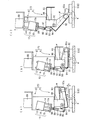
【解決手段】物品受渡ステーション3において、物品供給手段4から受取った物品Wを、所定の積込み容器に積付ける物品移載用ロボット装置2であって、ロボットベース部20と、ロボットベース部20に回動自在に連結された多関節ロボットアーム部21と、ロボットアーム部21の先端に回動自在に連結されたロボットハンド部23とを含み、ロボットハンド部23は、バケット保持部8と、物品を収容するためのバケット部9からなり、バケット部9は、バケット保持部8に対して傾動可能に保持され、かつ角度調整駆動部12によって傾き角度の調整が可能とされる。
【選択図】 図1
Description
ロボットベース部と、前記ロボットベース部に回動自在に連結された多関節ロボットアーム部と、前記ロボットアーム部の先端に回動自在に連結されたロボットハンド部とを含み、
前記ロボットハンド部は、バケット保持部と、前記物品を収容するためのバケット部とからなり、
前記バケット部は、バケット保持部に対して傾動可能に保持され、かつ角度調整駆動部によって傾き角度の調整が可能とされていることを特徴とする物品移載用ロボット装置である。
3 受渡ステーション
4 ワーク供給コンベア
5,6 積込みパレット
8 バケット保持部
9 バケット部
10 衝撃吸収手段
11 着脱手段
12 角度調整駆動部
20 ロボットベース部
21 ロボットアーム部
23 ロボットハンド部
89 開閉検出スイッチ
W ワーク
Claims (6)
- 物品受渡ステーションにおいて物品供給手段から受取った物品を、所定の積込み容器に積付ける物品移載用ロボット装置であって、
ロボットベース部と、前記ロボットベース部に回動自在に連結された多関節ロボットアーム部と、前記ロボットアーム部の先端に回動自在に連結されたロボットハンド部とを含み、
前記ロボットハンド部は、バケット保持部と、前記物品を収容するためのバケット部とからなり、
前記バケット部は、バケット保持部に対して傾動可能に保持され、かつ角度調整駆動部によって傾き角度の調整が可能とされていることを特徴とする物品移載用ロボット装置。 - 前記角度調整駆動部が、非作動の状態では、バケット部が自重で傾動するように構成されていることを特徴とする請求項1に記載の物品移載用ロボット装置。
- 前記バケット部が、バケット保持部に対して着脱手段を介して着脱自在に保持されていることを特徴とする請求項1または2に記載の物品移載用ロボット装置。
- 前記ロボットハンド部は、前記バケット部が受けた衝撃を吸収する衝撃吸収手段を備えていることを特徴とする請求項1〜3のいずれか1つに記載の物品移載用ロボット装置。
- 前記ロボットハンド部は、前記バケット部を傾動させて積込み容器内に物品を積付ける際に、バケット部が積込み容器内の積付け対象部に接触したときの高さを検出する高さ検出手段を備えることを特徴とする請求項1〜4のいずれか1つに記載の物品移載用ロボット装置。
- バケット部の上方への変位によって衝撃力を受けたことを検出する衝撃検出手段が設けられることを特徴とする請求項1〜5のいずれか1つに記載の物品移載用ロボット装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008195526A JP5139191B2 (ja) | 2008-07-29 | 2008-07-29 | 物品移載用ロボット装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008195526A JP5139191B2 (ja) | 2008-07-29 | 2008-07-29 | 物品移載用ロボット装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010029991A true JP2010029991A (ja) | 2010-02-12 |
| JP5139191B2 JP5139191B2 (ja) | 2013-02-06 |
Family
ID=41735111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008195526A Expired - Fee Related JP5139191B2 (ja) | 2008-07-29 | 2008-07-29 | 物品移載用ロボット装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5139191B2 (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101442431B1 (ko) * | 2010-07-13 | 2014-09-18 | 니혼 덴산 산쿄 가부시키가이샤 | 산업용 로보트 |
| CN104176511A (zh) * | 2014-08-26 | 2014-12-03 | 冯晓龙 | 一种码砖机器人 |
| CN105773583A (zh) * | 2016-05-20 | 2016-07-20 | 合肥工业大学 | 一种四工位机械手 |
| CN108297110A (zh) * | 2018-04-12 | 2018-07-20 | 苏州菱麦自动化设备科技有限公司 | 一种投篮机械手装置 |
| CN108860834A (zh) * | 2018-07-06 | 2018-11-23 | 常熟市中联光电新材料有限责任公司 | 机械手自动移袋装置 |
| CN109436641A (zh) * | 2018-10-18 | 2019-03-08 | 广东利迅达机器人系统股份有限公司 | 一种电镀线搬运上下料系统 |
| CN112193846A (zh) * | 2020-09-27 | 2021-01-08 | 王全明 | 一种运行稳定且不易脱落桶码垛机器人 |
| CN112591477A (zh) * | 2020-11-11 | 2021-04-02 | 东风汽车集团有限公司 | 一种差厚板料垛拆垛方法 |
| WO2021205425A1 (en) * | 2020-04-08 | 2021-10-14 | Prodieco Unlimited Company | Transfer apparatus and a method for transferring product from one level to another level |
| JP2023160421A (ja) * | 2022-04-22 | 2023-11-02 | サントリーホールディングス株式会社 | 回収装置および資材供給システム |
| WO2025127059A1 (ja) * | 2023-12-14 | 2025-06-19 | 川崎重工業株式会社 | ロボットシステム |
| JP7759521B1 (ja) * | 2025-04-04 | 2025-10-23 | ヤマザキマザック株式会社 | 工作機械システム、工作機械システムの動作方法、および、プログラム |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0419093A (ja) * | 1990-05-14 | 1992-01-23 | Meidensha Corp | ロボットの衝突検出装置 |
| JPH0666979U (ja) * | 1993-03-08 | 1994-09-20 | 株式会社明電舎 | 産業用マニプレータ等のハンド部衝撃吸収機構 |
| JPH079542U (ja) * | 1993-07-27 | 1995-02-10 | 株式会社阪村機械製作所 | 圧造成形機の打痕防止装置 |
| JPH0717491U (ja) * | 1993-09-02 | 1995-03-28 | 多摩川精機株式会社 | ロボット用ハンドリングツール |
| JPH07124878A (ja) * | 1993-10-29 | 1995-05-16 | Meidensha Corp | 産業用マニプレータ |
| JPH11123492A (ja) * | 1997-10-27 | 1999-05-11 | Mitsubishi Materials Corp | ロボットハンド |
| JP2001105379A (ja) * | 1999-10-12 | 2001-04-17 | Smc Corp | 緩衝機能付き電動ハンド |
| JP2007118175A (ja) * | 2005-09-27 | 2007-05-17 | Yaskawa Electric Corp | 搬送システム |
| JP3140032U (ja) * | 2007-12-03 | 2008-03-13 | 高津 豊 | フォークリフト用除雪バケット |
-
2008
- 2008-07-29 JP JP2008195526A patent/JP5139191B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0419093A (ja) * | 1990-05-14 | 1992-01-23 | Meidensha Corp | ロボットの衝突検出装置 |
| JPH0666979U (ja) * | 1993-03-08 | 1994-09-20 | 株式会社明電舎 | 産業用マニプレータ等のハンド部衝撃吸収機構 |
| JPH079542U (ja) * | 1993-07-27 | 1995-02-10 | 株式会社阪村機械製作所 | 圧造成形機の打痕防止装置 |
| JPH0717491U (ja) * | 1993-09-02 | 1995-03-28 | 多摩川精機株式会社 | ロボット用ハンドリングツール |
| JPH07124878A (ja) * | 1993-10-29 | 1995-05-16 | Meidensha Corp | 産業用マニプレータ |
| JPH11123492A (ja) * | 1997-10-27 | 1999-05-11 | Mitsubishi Materials Corp | ロボットハンド |
| JP2001105379A (ja) * | 1999-10-12 | 2001-04-17 | Smc Corp | 緩衝機能付き電動ハンド |
| JP2007118175A (ja) * | 2005-09-27 | 2007-05-17 | Yaskawa Electric Corp | 搬送システム |
| JP3140032U (ja) * | 2007-12-03 | 2008-03-13 | 高津 豊 | フォークリフト用除雪バケット |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101442431B1 (ko) * | 2010-07-13 | 2014-09-18 | 니혼 덴산 산쿄 가부시키가이샤 | 산업용 로보트 |
| CN104176511A (zh) * | 2014-08-26 | 2014-12-03 | 冯晓龙 | 一种码砖机器人 |
| CN105773583A (zh) * | 2016-05-20 | 2016-07-20 | 合肥工业大学 | 一种四工位机械手 |
| CN108297110A (zh) * | 2018-04-12 | 2018-07-20 | 苏州菱麦自动化设备科技有限公司 | 一种投篮机械手装置 |
| CN108297110B (zh) * | 2018-04-12 | 2024-05-31 | 苏州菱麦自动化设备科技有限公司 | 一种投篮机械手装置 |
| CN108860834A (zh) * | 2018-07-06 | 2018-11-23 | 常熟市中联光电新材料有限责任公司 | 机械手自动移袋装置 |
| CN109436641A (zh) * | 2018-10-18 | 2019-03-08 | 广东利迅达机器人系统股份有限公司 | 一种电镀线搬运上下料系统 |
| WO2021205425A1 (en) * | 2020-04-08 | 2021-10-14 | Prodieco Unlimited Company | Transfer apparatus and a method for transferring product from one level to another level |
| CN112193846A (zh) * | 2020-09-27 | 2021-01-08 | 王全明 | 一种运行稳定且不易脱落桶码垛机器人 |
| CN112591477A (zh) * | 2020-11-11 | 2021-04-02 | 东风汽车集团有限公司 | 一种差厚板料垛拆垛方法 |
| JP2023160421A (ja) * | 2022-04-22 | 2023-11-02 | サントリーホールディングス株式会社 | 回収装置および資材供給システム |
| JP7685465B2 (ja) | 2022-04-22 | 2025-05-29 | サントリーホールディングス株式会社 | 回収装置および資材供給システム |
| WO2025127059A1 (ja) * | 2023-12-14 | 2025-06-19 | 川崎重工業株式会社 | ロボットシステム |
| JP7759521B1 (ja) * | 2025-04-04 | 2025-10-23 | ヤマザキマザック株式会社 | 工作機械システム、工作機械システムの動作方法、および、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5139191B2 (ja) | 2013-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5139191B2 (ja) | 物品移載用ロボット装置 | |
| KR102115983B1 (ko) | 컨테이너 내에 배치된 공작물을 자동으로 제거하기 위한 장치 | |
| CN105492348B (zh) | 机器人纸箱卸载机 | |
| US5419669A (en) | Installation for lining an internal wall of an enclosure with brickwork | |
| CN101715381B (zh) | 板材切割中心的装载/卸载系统、其送料盘和装卸方法 | |
| JP7145673B2 (ja) | 荷役装置 | |
| US7039499B1 (en) | Robotic storage buffer system for substrate carrier pods | |
| CN210753836U (zh) | 末端执行器、机器人和货物分拣系统 | |
| JP7560110B2 (ja) | 物品移載装置、吸着機構及び物品移載方法 | |
| JP7401285B2 (ja) | 自動倉庫システム | |
| JP2017149572A (ja) | 整列搬送装置 | |
| KR100245531B1 (ko) | 판상체 및 고하중체를 수직에 가까운 방향으로 적재하기 위한 프레임 및 수평 캐리지를 갖춘 배출수단 | |
| JPH037571B2 (ja) | ||
| CN217291311U (zh) | 一种自动化加工系统 | |
| JPS61197398A (ja) | 物品取扱い装置 | |
| JP5842846B2 (ja) | 工作機械 | |
| JP7669422B2 (ja) | 取出装置、取出方法、制御装置およびプログラム | |
| CN116809838A (zh) | 车架横梁铆接系统及铆接方法 | |
| KR101948876B1 (ko) | 팔레트 리프팅 장치 | |
| TW202327943A (zh) | 堆棧容納結構 | |
| JPH07187317A (ja) | 窯業製品の移載装置 | |
| JPH079378A (ja) | 物品自動取扱装置 | |
| WO2014136541A1 (ja) | ワーク搬送方法及びワーク搬送システム | |
| CN110116901B (zh) | 一种三轴自动上料机器人系统 | |
| JP3529803B2 (ja) | 板材加工機の製品搬出装置およびその装置を用いた搬出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110713 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120906 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120918 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121115 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151122 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |