JP2010026654A - 運転者状態判定装置および運転者状態判定方法 - Google Patents
運転者状態判定装置および運転者状態判定方法 Download PDFInfo
- Publication number
- JP2010026654A JP2010026654A JP2008185142A JP2008185142A JP2010026654A JP 2010026654 A JP2010026654 A JP 2010026654A JP 2008185142 A JP2008185142 A JP 2008185142A JP 2008185142 A JP2008185142 A JP 2008185142A JP 2010026654 A JP2010026654 A JP 2010026654A
- Authority
- JP
- Japan
- Prior art keywords
- driver
- state
- line
- careless
- sight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Traffic Control Systems (AREA)
Abstract
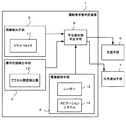
【解決手段】視線検出手段および操作状態検出手段の少なくともいずれか1つと、環境識別手段と、不注意状態判定手段とを備える。視線検出手段は、運転者の視線の状態を検出する。操作状態検出手段は、運転者による車両の操作状態を検出する。環境識別手段は、車両周辺の環境を検出する。不注意状態判定手段は、視線検出手段および操作状態検出手段の少なくともいずれか1つにより検出された検出値とそれぞれの閾値とを比較し、その比較結果に基づいて運転者の不注意状態を判定する。それぞれの閾値は、環境識別手段により検出された環境に応じて変わる。
【選択図】図1
Description
視線検出手段2は、ドライバカメラ11を含み、運転者の視線の状態を検出する。視線検出手段2は、運転者の視線の状態として、視線停留時間を検出する。ここで視線停留時間とは、運転者が一点を見つめている間の時間である。ドライバカメラ11は、例えば、CCDカメラなどで構成され、運転者の顔を撮影する。視線検出手段2は、撮影された運転者の顔画像から運転者の視線を検出する。運転者の視線が所定時間以上、同一の方向を向いている場合、視線検出手段2は、運転者の視線が停留していると認識し、視線停留時間を算出する。本実施形態では、通常、人間が1秒間に視線を動かすことのできる回数が3回程度であることを考慮して、上記所定時間は、例えば0.35(sec)に設定される。また、本実施形態では、視線検出手段2の精度を考慮して、視線が所定の角度範囲、例えば±2.5°以内の場合に、同一方向を向いている状態とする。視線検出手段2は、検出した視線停留時間を不注意状態判定手段5に出力する。なお、視線検出手段2は、運転者の視線停留時間を検出するものであれば、上記CCDカメラ以外にどのような構成でも構わない。また、ここで示された数値は、本発明を何ら限定するものではない。
図2は、本実施形態に係る運転者状態判定装置1による運転者の状態判定の流れを示すフローチャートである。図2に示すフローチャートによる処理は、不注意状態判定手段5によって制御される。図2に示す処理は、例えば、車両のイグクッションがONの間、あるいは、車両が走行している間、繰り返し実行される。以下、図2に示すフローチャートの説明をする。
2 視線検出手段
3 操作状態検出手段
4 環境識別手段
5 不注意状態判定手段
6 支援手段
7 外界通知手段
11 ドライバカメラ
12 アクセル開度検出器
13 レーダー
14 ナビゲーションシステム
20 自車両
21 他車両
22 歩行者
Claims (16)
- 運転者の状態を判定する装置であって、
運転者の視線の状態を検出する視線検出手段および運転者による車両の操作状態を検出する操作状態検出手段の少なくともいずれか1つと、
車両周辺の環境を識別する環境識別手段と、
前記視線検出手段および前記操作状態検出手段の少なくともいずれか1つにより検出された検出値とそれぞれの閾値とを比較し、その比較結果に基づいて運転者の不注意状態を判定する不注意状態判定手段とを備え、
前記それぞれの閾値は、前記環境識別手段により識別された環境に応じて変わることを特徴とする、運転者状態判定装置。 - 前記視線検出手段は、前記視線の状態として、運転者の視線停留時間を検出することを特徴とする、請求項1に記載の運転者状態判定装置。
- 前記操作状態検出手段は、前記車両の操作状態として、アクセル開度を検出することを特徴とする、請求項1に記載の運転者状態判定装置。
- 前記不注意状態判定手段は、前記視線停留時間が前記閾値以上である場合に、運転者が不注意状態であると判定することを特徴とする、請求項2に記載の運転者状態判定装置。
- 前記不注意状態判定手段は、前記アクセル開度の移動平均と前記アクセル開度との差である修正アクセル開度から算出した該修正アクセル開度の標準偏差が前記閾値以上である場合に、運転者が不注意状態であると判定することを特徴とする、請求項3に記載の運転者状態判定装置。
- 前記視線検出手段は、前記視線の状態として、運転者の視線停留時間を検出し、
前記操作状態検出手段は、前記車両の操作状態として、アクセル開度を検出し、
前記不注意状態判定手段は、前記アクセル開度の移動平均と前記アクセル開度との差である修正アクセル開度から算出した該修正アクセル開度の標準偏差が前記閾値以上である場合、または前記視線停留時間が前記閾値以上である場合に、運転者が不注意状態であると判定することを特徴とする、請求項1に記載の運転者状態判定装置。 - 前記環境識別手段は、前記車両の先行車の有無を識別することを特徴とする、請求項1から6のいずれか1項に記載の運転者状態判定装置。
- 不注意状態判定手段は、前記先行車が存在する場合、前記閾値を前記先行車が存在しない場合より高くすることを特徴とする、請求項7に記載の運転者状態判定装置。
- 運転者の状態を判定する装置であって、
運転者の視線の状態を検出する視線検出手段と、
運転者による車両の操作状態を検出する操作状態検出手段と、
前記視線検出手段より検出された検出値および前記操作状態検出手段により検出された検出値とそれぞれの閾値とを比較し、その比較結果に基づいて運転者の不注意状態を判定する不注意状態判定手段とを備える、運転者状態判定装置。 - 前記不注意状態判定手段は、前記視線検出手段より検出された検出値または前記操作状態検出手段により検出された検出値の少なくともいずれか一方が、前記閾値以上である場合に、運転者が不注意状態であると判定することを特徴とする、請求項9に記載の運転者状態判定装置。
- 前記不注意状態判定手段は、運転者が不注意状態であると判定した場合、運転者を支援する支援手段に対して、運転者への支援を要求することを特徴とする、請求項1から10のいずれか1項に記載の運転者状態判定装置。
- 前記不注意状態判定手段は、前記支援手段である、プリクラッシュ・セーフティシステムに対して、運転者への注意喚起を要求することを特徴とする、請求項11に記載の運転者状態判定装置。
- 前記不注意状態判定手段は、運転者が不注意状態であると判定した場合、前記車両の外界へ通知を行う外界通知手段に対して、外界への注意喚起を要求することを特徴とする、請求項1から12のいずれか1項に記載の運転者状態判定装置。
- 前記不注意状態判定手段は、前記外界通知手段である、インフラ協調システムに対して、歩行者や接近車両への注意喚起を要求することを特徴とする、請求項13に記載の運転者状態判定装置。
- 運転者の状態を判定する方法であって、
運転者の視線の状態を検出する視線検出ステップおよび運転者による車両の操作状態を検出する操作状態検出ステップの少なくともいずれか1つのステップと、
車両周辺の環境を識別する環境識別ステップと、
前記視線検出ステップおよび前記操作状態検出ステップの少なくともいずれか1つのステップにより検出された検出値とそれぞれの閾値とを比較し、その比較結果に基づいて運転者の不注意状態を判定する不注意状態判定ステップとを備え、
前記それぞれの閾値は、前記環境識別ステップにより識別された環境に応じて変わることを特徴とする、運転者状態判定方法。 - 運転者の状態を判定する方法であって、
運転者の視線の状態を検出する視線検出ステップと、
運転者による車両の操作状態を検出する操作状態検出ステップと、
前記視線検出ステップより検出された検出値および前記操作状態検出ステップにより検出された検出値とそれぞれの閾値とを比較し、その比較結果に基づいて運転者の不注意状態を判定する不注意状態判定ステップとを備える、運転者状態判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008185142A JP4973953B2 (ja) | 2008-07-16 | 2008-07-16 | 運転者状態判定装置および運転者状態判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008185142A JP4973953B2 (ja) | 2008-07-16 | 2008-07-16 | 運転者状態判定装置および運転者状態判定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010026654A true JP2010026654A (ja) | 2010-02-04 |
| JP4973953B2 JP4973953B2 (ja) | 2012-07-11 |
Family
ID=41732452
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008185142A Expired - Fee Related JP4973953B2 (ja) | 2008-07-16 | 2008-07-16 | 運転者状態判定装置および運転者状態判定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4973953B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012143999A1 (ja) | 2011-04-18 | 2012-10-26 | トヨタ自動車株式会社 | ドライバ状態判定装置 |
| JP2019123434A (ja) * | 2018-01-18 | 2019-07-25 | マツダ株式会社 | ドライバ状態判定装置 |
| EP3754626A1 (en) | 2019-06-21 | 2020-12-23 | Yazaki Corporation | Vehicle warning system |
| WO2025215812A1 (ja) * | 2024-04-12 | 2025-10-16 | 三菱電機モビリティ株式会社 | 情報処理装置及び情報処理方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06251273A (ja) * | 1993-02-23 | 1994-09-09 | Mitsubishi Electric Corp | 運転者状態判定装置 |
| JPH07201000A (ja) * | 1993-12-28 | 1995-08-04 | Mazda Motor Corp | 車両の制御装置 |
| JP2000326757A (ja) * | 1999-05-18 | 2000-11-28 | Mitsubishi Electric Corp | 危険接近防止装置 |
| JP2002367100A (ja) * | 2001-06-12 | 2002-12-20 | Nissan Motor Co Ltd | 運転者状態検出装置 |
| JP2007073011A (ja) * | 2005-09-09 | 2007-03-22 | Fuji Heavy Ind Ltd | 運転状態推定装置 |
| JP2007133692A (ja) * | 2005-11-10 | 2007-05-31 | Toyota Motor Corp | 運転行動評価装置 |
| JP2007293625A (ja) * | 2006-04-25 | 2007-11-08 | Toyota Motor Corp | 運転支援システム並びに該システムを構成する運転支援装置および異常状態発信装置 |
-
2008
- 2008-07-16 JP JP2008185142A patent/JP4973953B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06251273A (ja) * | 1993-02-23 | 1994-09-09 | Mitsubishi Electric Corp | 運転者状態判定装置 |
| JPH07201000A (ja) * | 1993-12-28 | 1995-08-04 | Mazda Motor Corp | 車両の制御装置 |
| JP2000326757A (ja) * | 1999-05-18 | 2000-11-28 | Mitsubishi Electric Corp | 危険接近防止装置 |
| JP2002367100A (ja) * | 2001-06-12 | 2002-12-20 | Nissan Motor Co Ltd | 運転者状態検出装置 |
| JP2007073011A (ja) * | 2005-09-09 | 2007-03-22 | Fuji Heavy Ind Ltd | 運転状態推定装置 |
| JP2007133692A (ja) * | 2005-11-10 | 2007-05-31 | Toyota Motor Corp | 運転行動評価装置 |
| JP2007293625A (ja) * | 2006-04-25 | 2007-11-08 | Toyota Motor Corp | 運転支援システム並びに該システムを構成する運転支援装置および異常状態発信装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012143999A1 (ja) | 2011-04-18 | 2012-10-26 | トヨタ自動車株式会社 | ドライバ状態判定装置 |
| JPWO2012143999A1 (ja) * | 2011-04-18 | 2014-07-28 | トヨタ自動車株式会社 | ドライバ状態判定装置 |
| US9082283B2 (en) | 2011-04-18 | 2015-07-14 | Toyota Jidosha Kabushiki Kaisha | Driver condition assessment device |
| JP2019123434A (ja) * | 2018-01-18 | 2019-07-25 | マツダ株式会社 | ドライバ状態判定装置 |
| JP7056164B2 (ja) | 2018-01-18 | 2022-04-19 | マツダ株式会社 | ドライバ状態判定装置 |
| EP3754626A1 (en) | 2019-06-21 | 2020-12-23 | Yazaki Corporation | Vehicle warning system |
| WO2025215812A1 (ja) * | 2024-04-12 | 2025-10-16 | 三菱電機モビリティ株式会社 | 情報処理装置及び情報処理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4973953B2 (ja) | 2012-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3663155B1 (en) | Autonomous driving system | |
| JP5345350B2 (ja) | 車両の運転支援装置 | |
| KR102005253B1 (ko) | 극도로 빠르게 접근하는 차량들에 응답하는 차선 보조 시스템 | |
| JP6084598B2 (ja) | 標識情報表示システム及び標識情報表示方法 | |
| JP5267570B2 (ja) | 運転支援装置 | |
| US20120101711A1 (en) | Collision Warning Apparatus | |
| JP5899992B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| CN105513420B (zh) | 车辆用交叉路口关联警报装置 | |
| CN107444406A (zh) | 车辆辅助驾驶系统及方法 | |
| JP5768335B2 (ja) | 車両の右折時走行支援装置及び右折時走行支援方法 | |
| EP2363846A1 (en) | System and method for collision warning | |
| KR20180078986A (ko) | 센서 융합 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 | |
| KR20200017971A (ko) | 차량 및 그 제어방법 | |
| KR20180078983A (ko) | 센서 융합 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 | |
| JP2016527602A (ja) | 自動車のための運転者アシストシステムで真の障害物と見かけの障害物との間の区別をする方法 | |
| JP4984876B2 (ja) | 車両間通信装置及び車両間通信システム | |
| JP5210064B2 (ja) | 車両の衝突防止装置 | |
| JP2010072836A (ja) | 周辺監視装置 | |
| JP4973953B2 (ja) | 運転者状態判定装置および運転者状態判定方法 | |
| JP6019575B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP4946005B2 (ja) | 運転者心理状態判定装置及び運転者心理状態判定システム | |
| JP4766058B2 (ja) | 情報提供装置、情報提供システム、車両及び情報提供方法 | |
| JP6548147B2 (ja) | 車両用制御装置 | |
| JP5655399B2 (ja) | 右折時走行支援装置、右折時走行支援方法 | |
| KR20230010858A (ko) | 차량의 가변차로 탈출장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100923 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110901 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120123 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120229 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120315 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120328 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4973953 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150420 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |