JP2010023809A - 車両駆動用アクチュエータ - Google Patents
車両駆動用アクチュエータ Download PDFInfo
- Publication number
- JP2010023809A JP2010023809A JP2008191197A JP2008191197A JP2010023809A JP 2010023809 A JP2010023809 A JP 2010023809A JP 2008191197 A JP2008191197 A JP 2008191197A JP 2008191197 A JP2008191197 A JP 2008191197A JP 2010023809 A JP2010023809 A JP 2010023809A
- Authority
- JP
- Japan
- Prior art keywords
- bevel gear
- connecting member
- vehicle
- gear
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 105
- 239000000463 material Substances 0.000 claims description 21
- 230000008878 coupling Effects 0.000 claims description 9
- 238000010168 coupling process Methods 0.000 claims description 9
- 238000005859 coupling reaction Methods 0.000 claims description 9
- 230000008929 regeneration Effects 0.000 claims description 6
- 238000011069 regeneration method Methods 0.000 claims description 6
- 230000009467 reduction Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 6
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 239000013585 weight reducing agent Substances 0.000 description 5
- 230000000694 effects Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000005549 size reduction Methods 0.000 description 2
- 241000270295 Serpentes Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images







Landscapes
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
- Gear Transmission (AREA)
- Retarders (AREA)
Abstract
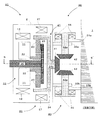
【解決手段】車両駆動用アクチュエータA1は、電動モータ10と、電動モータ10の回転を車軸26に伝達して車輪を回転駆動する車輪駆動ユニット20と、車輪を操舵制動する舵角制御機構40とを備え、車両駆動ユニット20は、電動モータ10の回転を減速して車軸26へ伝達すると共に動力を分配可能な遊星ギア機構21を備え、遊星ギア機構21によって分配された動力によって舵角制御機構40を作動させるように構成される。
【選択図】図1
Description
図1には、第1実施形態における車両駆動用アクチュエータA1を示す概略構成図が示されており、車両に搭乗した運転者側から視て右側後輪に搭載した状態を、車両前方(車両進行方向)から視た図面である。図2(a)には、図1中、一点鎖線B−B´で指示された上視図が示されている。
第1実施形態の変形例として、例えば、車両駆動ユニット20内に配設されたクラッチ27を省略しても、同様の効果を奏することが実現できる。
次に、図4及び図5に記載された図面を参照にしつつ、本発明の第2実施形態について説明する。第2実施形態は、車両停止時のみに作動可能な車両駆動用アクチュエータA1であり、操舵ユニット30の構成形態と、舵角制御機構40の構成形態とが第1実施形態と相違し、他は同様であるため、この相違点を主に説明する。
次に、図6〜図8に記載された図面を参照にしつつ、本発明の第3実施形態について説明する。第3実施形態も、車両停止時のみに作動可能な車両駆動用アクチュエータA1であり、操舵ユニット30の構成形態と、舵角制御機構40の構成形態とが第2実施形態と相違し、他は同様であるため、この相違点を主に説明する。
1:車体、 10:電動モータ、 11:モータステータ、 12:モータロータ
2:ハウジング、 20:車輪駆動ユニット、 21:遊星ギア減速機構、 22:サンギア、23:プラネタリギア、 24:リングギア、 24a:連結シャフト 25:プラネタリキャリア、26:車両駆動軸、 27:クラッチ
30:操舵ユニット、 31a、b:連結材、 32a、b:連結材、 33〜35:連結材、 34a、b:軸支点、 35a、b:軸支点
40:舵角制御機構、 41〜43:かさ歯車、 42a、43a:シャフト
44、45:クラッチ 46:シャフト、 46a:共有シャフト、 47:ウォームギア、 48:ウォームホイール
Claims (10)
- 電動モータと、前記電動モータの回転を車軸に伝達して車輪を回転駆動する車輪駆動ユニットと、前記車輪を操舵制動する舵角制御機構とを備えた車両駆動用アクチュエータであって、
前記車両駆動ユニットは、前記電動モータの回転を減速して前記車軸へ伝達すると共に動力を分配可能な遊星ギア機構を備え、
前記遊星ギア機構によって分配された動力によって前記舵角制御機構を作動させるように構成される、
ことを特徴とする車両駆動用アクチュエータ。 - 前記遊星ギア機構は、サンギアに前記電動モータの回転を入力し、プラネタリキャリアから前記車軸へ回転を出力すると共に、リングギアから出力される動力によって前記舵角制御機構を作動させるように構成される、
ことを特徴とする請求項1に記載の車両駆動用アクチュエータ。 - 前記舵角制御機構は、
前記リングギアと共に回転可能に軸支された第1のかさ歯車と、
前記第1のかさ歯車に噛合して回動する第2のかさ歯車と、
前記第2のかさ歯車を固定状態と解放状態とに切換える第2の切換え機構と、
前記第2のかさ歯車に対して前記第1のかさ歯車を挟んで対向して配設された第3のかさ歯車と、
前記第3のかさ歯車を固定状態と解放状態とに切換える第3の切換え機構とを備え、
前記第2のかさ歯車は、一端が前記車体側に連結された第1の連結材の他端に回転可能に軸支されると共に、一端が前記車輪駆動ユニット側に連結され且つ前記第1の連結材と軸支点を共有する第2の連結材の他端に回転可能に軸支され、
前記第3のかさ歯車は、一端が前記車体側に連結された第3の連結材の他端に回転可能に軸支されると共に、一端が前記車輪駆動ユニット側に連結され且つ前記第3の連結材と軸支点を共有する第4の連結材の他端に回転可能に軸支される、
ことを特徴とする請求項2に記載の車両駆動用アクチュエータ。 - 前記舵角制御機構は、
前記リングギアと共に回転可能に軸支された第1のかさ歯車と、
前記第1のかさ歯車に噛合して回動する第2のかさ歯車とを備え、
前記第2のかさ歯車は、一端が前記車体側に連結された第1の連結材の他端に固定されると共に、一端が前記車輪駆動ユニット側に連結され且つ前記第1の連結材と軸支点を共有する第2の連結材の他端に回転可能に軸支され、
前記軸支点の鉛直上には、
一端が前記車体側に連結された第3の連結材と、一端が前記車輪駆動ユニット側に連結された第4の連結材との共有する軸支点が回転可能に支持されている、
ことを特徴とする請求項2に記載の車両駆動用アクチュエータ。 - 前記舵角制御機構は、
前記リングギアと共に回転可能に軸支されたウォームギアと、
前記ウォームギアに噛合して回動可能とするウォームホイールと、
前記ウォームホイールの径方向に回動可能に支持された第1の連結材とを備え、
前記ウォームホイールは、一端が前記車体側に回動可能に連結されると共に、他端は前記車輪駆動ユニット側に連結された第2の連結材に軸支されており、
前記ウォームホイールの径方向に回動可能に支持された前記第1の連結材の他端は、前記車体側に回動可能に支持されている、
ことを特徴とする請求項2に記載の車両駆動用アクチュエータ。 - 電動モータと、前記電動モータの回転を車軸に伝達して車輪を回転駆動する車輪駆動ユニットと、前記車輪を操舵制動する舵角制御機構とを備えた車両駆動用アクチュエータであって、
前記車両駆動ユニットは、前記電動モータからの動力を複数に分配可能な動力分配機構を備え、
前記舵角制御機構は、
前記動力分配機構によって分配された動力によって回転駆動される第1のかさ歯車と、
前記第1のかさ歯車に噛合して回動する第2のかさ歯車と、
前記第2のかさ歯車を固定状態と解放状態とに切換える第2の切換え機構と、
前記第2のかさ歯車に対して前記第1のかさ歯車を挟んで対向して配設された第3のかさ歯車と、
前記第3のかさ歯車を固定状態と解放状態とに切換える第3の切換え機構とを備え、
前記第2のかさ歯車は、一端が前記車体側に連結された第1の連結材の他端に回転可能に軸支されると共に、一端が前記車輪駆動ユニット側に連結され且つ前記第1の連結材と軸支点を共有する第2の連結材の他端に回転可能に軸支され、
前記第3のかさ歯車は、一端が前記車体側に連結された第3の連結材の他端に回転可能に軸支されると共に、一端が前記車輪駆動ユニット側に連結され且つ前記第3の連結材と軸支点を共有する第4の連結材の他端に回転可能に軸支される、
ことを特徴とする車両駆動用アクチュエータ。 - 前記舵角制御機構は、
前記動力分配機構によって分配された動力によって回転駆動される第1のかさ歯車と、
前記第1のかさ歯車に噛合して回動する第2のかさ歯車とを備え、
前記第2のかさ歯車は、一端が前記車体側に連結された第1の連結材の他端に固定されると共に、一端が前記車輪駆動ユニット側に連結され且つ前記第1の連結材と軸支点を共有する第2の連結材の他端に回転可能に軸支され、
前記軸支点の鉛直上には、
一端が前記車体側に連結された第3の連結材と、一端が前記車輪駆動ユニット側に連結された第4の連結材との共有する軸支点が回転可能に支持されている、
ことを特徴とする請求項5に記載の車両駆動用アクチュエータ。 - 前記舵角制御機構は、
前記動力分配機構によって分配された動力によって回転駆動されるウォームギアと、
前記ウォームギアに噛合して回動可能とするウォームホイールと、
前記ウォームホイールの径方向に回動可能に支持された第1の連結材とを備え、
前記ウォームホイールは、一端が前記車体側に回動可能に連結されると共に、他端は前記車輪駆動ユニット側に連結された第2の連結材に軸支されており、
前記ウォームホイールの径方向に回動可能に支持された前記第1の連結材の他端は、前記車体側に回動可能に支持されている、
ことを特徴とする請求項5に記載の車両駆動用アクチュエータ。 - 前記動力分配機構は、前記電動モータの回転を減速して前記車軸へ伝達すると共に動力を分配可能な遊星ギア機構によって構成される、
ことを特徴とする請求項6乃至8の何れか一項に記載の車両駆動用アクチュエータ。 - 前記舵角制御機構は、
前記電動モータの力行時と回生時との駆動状態に合わせ、
前記第2の切換え機構の固定または解放状態と、前記第3の切換え機構の固定または解放状態とを、反転させる、
ことを特徴とする請求項3または6に記載の車両駆動用アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008191197A JP5239582B2 (ja) | 2008-07-24 | 2008-07-24 | 車両駆動用アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008191197A JP5239582B2 (ja) | 2008-07-24 | 2008-07-24 | 車両駆動用アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010023809A true JP2010023809A (ja) | 2010-02-04 |
| JP5239582B2 JP5239582B2 (ja) | 2013-07-17 |
Family
ID=41730016
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008191197A Expired - Fee Related JP5239582B2 (ja) | 2008-07-24 | 2008-07-24 | 車両駆動用アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5239582B2 (ja) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103273957A (zh) * | 2013-05-30 | 2013-09-04 | 方群 | 非圆齿轮传动式汽车转向装置 |
| CN103382985A (zh) * | 2013-07-04 | 2013-11-06 | 银川威力减速器有限公司 | 脱挂式架空索道缆车的行星减速装置 |
| JP2014087170A (ja) * | 2012-10-24 | 2014-05-12 | Seiko Epson Corp | 電気機械装置、並びに、これを備える移動体およびロボット |
| CN104265841A (zh) * | 2014-08-25 | 2015-01-07 | 南京金鑫传动设备有限公司 | 大功率矿渣微粉磨主齿轮箱 |
| KR101736412B1 (ko) | 2016-03-29 | 2017-05-16 | 홍윤석 | 전기 자동차용 구동장치 |
| US9663141B2 (en) | 2015-06-26 | 2017-05-30 | Jtekt Corporation | Vehicular steering system |
| KR101751511B1 (ko) | 2016-03-29 | 2017-06-27 | 홍윤석 | 전기 자동차용 구동장치 |
| CN111572627A (zh) * | 2020-06-17 | 2020-08-25 | 上海智御动力技术有限公司 | 内外轮转角分配装置 |
| WO2021044469A1 (ja) * | 2019-09-02 | 2021-03-11 | ヤマハ発動機株式会社 | 操舵モジュール |
| WO2021045110A1 (ja) * | 2019-09-02 | 2021-03-11 | ヤマハ発動機株式会社 | 操舵モジュール |
| WO2021044471A1 (ja) * | 2019-09-02 | 2021-03-11 | ヤマハ発動機株式会社 | モジュール |
| CN113124136A (zh) * | 2021-05-21 | 2021-07-16 | 博能传动(苏州)有限公司 | 一种搅拌用伞齿斜齿马达 |
| CN113187879A (zh) * | 2021-05-20 | 2021-07-30 | 博能传动(苏州)有限公司 | 一种搅拌专用齿轮箱 |
| KR20240129539A (ko) * | 2023-02-20 | 2024-08-27 | 주식회사 리눅 | 서보형 바퀴 장치가 포함된 이동체 |
| CN119796316A (zh) * | 2024-11-27 | 2025-04-11 | 比亚迪股份有限公司 | 转向系统、底盘总成和车辆 |
| CN119840408A (zh) * | 2025-01-09 | 2025-04-18 | 河南工业大学 | 一种单电机舵轮 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105584359A (zh) * | 2016-03-28 | 2016-05-18 | 泉州鑫豪工程机械科技有限公司 | 挖掘机转向驱动桥 |
| FR3079980B1 (fr) * | 2018-04-10 | 2020-05-22 | Valeo Systemes Thermiques | Actionneur electrique pour un systeme de chauffage, ventilation et/ou climatisation pour vehicule automobile |
| JP7143748B2 (ja) * | 2018-12-07 | 2022-09-29 | 株式会社豊田中央研究所 | 転舵機能付き車両駆動装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06247158A (ja) * | 1993-02-26 | 1994-09-06 | Nippon Sharyo Seizo Kaisha Ltd | 車輪駆動装置 |
| JP2004090903A (ja) * | 2002-09-03 | 2004-03-25 | Yoichiro Sawa | モータ付き車輪装置 |
| JP2005119548A (ja) * | 2003-10-17 | 2005-05-12 | Nissan Motor Co Ltd | 電気自動車のサスペンション装置 |
| JP2007145069A (ja) * | 2005-11-24 | 2007-06-14 | Toyota Motor Corp | 車両用駆動輪構造 |
| JP2007145071A (ja) * | 2005-11-24 | 2007-06-14 | Toyota Motor Corp | 車両用駆動輪構造 |
| JP2007145070A (ja) * | 2005-11-24 | 2007-06-14 | Toyota Motor Corp | 車両用駆動輪構造 |
| JP2008001129A (ja) * | 2006-06-20 | 2008-01-10 | Nissan Motor Co Ltd | 後輪操舵装置 |
| JP2009262915A (ja) * | 2008-04-01 | 2009-11-12 | Denso Corp | 車両駆動用アクチュエータ及び車両 |
-
2008
- 2008-07-24 JP JP2008191197A patent/JP5239582B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06247158A (ja) * | 1993-02-26 | 1994-09-06 | Nippon Sharyo Seizo Kaisha Ltd | 車輪駆動装置 |
| JP2004090903A (ja) * | 2002-09-03 | 2004-03-25 | Yoichiro Sawa | モータ付き車輪装置 |
| JP2005119548A (ja) * | 2003-10-17 | 2005-05-12 | Nissan Motor Co Ltd | 電気自動車のサスペンション装置 |
| JP2007145069A (ja) * | 2005-11-24 | 2007-06-14 | Toyota Motor Corp | 車両用駆動輪構造 |
| JP2007145071A (ja) * | 2005-11-24 | 2007-06-14 | Toyota Motor Corp | 車両用駆動輪構造 |
| JP2007145070A (ja) * | 2005-11-24 | 2007-06-14 | Toyota Motor Corp | 車両用駆動輪構造 |
| JP2008001129A (ja) * | 2006-06-20 | 2008-01-10 | Nissan Motor Co Ltd | 後輪操舵装置 |
| JP2009262915A (ja) * | 2008-04-01 | 2009-11-12 | Denso Corp | 車両駆動用アクチュエータ及び車両 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014087170A (ja) * | 2012-10-24 | 2014-05-12 | Seiko Epson Corp | 電気機械装置、並びに、これを備える移動体およびロボット |
| CN103273957A (zh) * | 2013-05-30 | 2013-09-04 | 方群 | 非圆齿轮传动式汽车转向装置 |
| CN103382985A (zh) * | 2013-07-04 | 2013-11-06 | 银川威力减速器有限公司 | 脱挂式架空索道缆车的行星减速装置 |
| CN104265841A (zh) * | 2014-08-25 | 2015-01-07 | 南京金鑫传动设备有限公司 | 大功率矿渣微粉磨主齿轮箱 |
| US9663141B2 (en) | 2015-06-26 | 2017-05-30 | Jtekt Corporation | Vehicular steering system |
| KR101736412B1 (ko) | 2016-03-29 | 2017-05-16 | 홍윤석 | 전기 자동차용 구동장치 |
| KR101751511B1 (ko) | 2016-03-29 | 2017-06-27 | 홍윤석 | 전기 자동차용 구동장치 |
| WO2021044469A1 (ja) * | 2019-09-02 | 2021-03-11 | ヤマハ発動機株式会社 | 操舵モジュール |
| WO2021045110A1 (ja) * | 2019-09-02 | 2021-03-11 | ヤマハ発動機株式会社 | 操舵モジュール |
| WO2021044471A1 (ja) * | 2019-09-02 | 2021-03-11 | ヤマハ発動機株式会社 | モジュール |
| CN111572627A (zh) * | 2020-06-17 | 2020-08-25 | 上海智御动力技术有限公司 | 内外轮转角分配装置 |
| CN113187879A (zh) * | 2021-05-20 | 2021-07-30 | 博能传动(苏州)有限公司 | 一种搅拌专用齿轮箱 |
| CN113124136A (zh) * | 2021-05-21 | 2021-07-16 | 博能传动(苏州)有限公司 | 一种搅拌用伞齿斜齿马达 |
| KR20240129539A (ko) * | 2023-02-20 | 2024-08-27 | 주식회사 리눅 | 서보형 바퀴 장치가 포함된 이동체 |
| KR102849414B1 (ko) | 2023-02-20 | 2025-08-22 | 주식회사 리눅 | 서보형 바퀴 장치가 포함된 이동체 |
| CN119796316A (zh) * | 2024-11-27 | 2025-04-11 | 比亚迪股份有限公司 | 转向系统、底盘总成和车辆 |
| CN119840408A (zh) * | 2025-01-09 | 2025-04-18 | 河南工业大学 | 一种单电机舵轮 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5239582B2 (ja) | 2013-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5239582B2 (ja) | 車両駆動用アクチュエータ | |
| JP4909807B2 (ja) | ハイブリッド車両の駆動装置 | |
| CN109130815B (zh) | 动力装置的支承结构 | |
| JP5625999B2 (ja) | 駆動装置 | |
| JP5757337B2 (ja) | 車両用電動駆動装置 | |
| JP5349988B2 (ja) | 電気自動車用駆動システム | |
| JP2010519886A (ja) | 入れ子状可変界磁発電電動機械 | |
| JP2011143754A (ja) | ハイブリッド車の駆動装置 | |
| JP2019050706A (ja) | 電気自動車用駆動装置 | |
| JP2011038637A (ja) | 車両用駆動装置および車両の駆動方法 | |
| WO2013080982A1 (ja) | 動力伝達装置 | |
| KR20180121407A (ko) | 기어 전동 장치 | |
| JP6097494B2 (ja) | 電気車駆動システム | |
| JP5263577B2 (ja) | 車両駆動用アクチュエータ | |
| JP5634746B2 (ja) | 建設機械旋回機構の駆動装置 | |
| JP5834688B2 (ja) | 車両の駆動装置 | |
| US11692619B2 (en) | Power transmission device | |
| JP2019050705A (ja) | 電気自動車用駆動装置 | |
| JP6156632B2 (ja) | 車両のトランスアクスル装置 | |
| JP6794913B2 (ja) | 歯車伝動装置 | |
| JP2007145070A (ja) | 車両用駆動輪構造 | |
| JP6678099B2 (ja) | 駆動装置及び車椅子 | |
| JP7276560B2 (ja) | 電動駆動装置 | |
| JP2018112221A (ja) | 動力装置 | |
| JP2021109628A (ja) | 車両用駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110420 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130318 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5239582 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |