JP2010012586A - 作業工具 - Google Patents
作業工具 Download PDFInfo
- Publication number
- JP2010012586A JP2010012586A JP2008177156A JP2008177156A JP2010012586A JP 2010012586 A JP2010012586 A JP 2010012586A JP 2008177156 A JP2008177156 A JP 2008177156A JP 2008177156 A JP2008177156 A JP 2008177156A JP 2010012586 A JP2010012586 A JP 2010012586A
- Authority
- JP
- Japan
- Prior art keywords
- tool
- axis direction
- dynamic vibration
- space
- long axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D17/00—Details of, or accessories for, portable power-driven percussive tools
- B25D17/24—Damping the reaction force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2211/00—Details of portable percussive tools with electromotor or other motor drive
- B25D2211/006—Parallel drill and motor spindles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2211/00—Details of portable percussive tools with electromotor or other motor drive
- B25D2211/06—Means for driving the impulse member
- B25D2211/061—Swash-plate actuated impulse-driving mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2217/00—Details of, or accessories for, portable power-driven percussive tools
- B25D2217/0073—Arrangements for damping of the reaction force
- B25D2217/0076—Arrangements for damping of the reaction force by use of counterweights
- B25D2217/0092—Arrangements for damping of the reaction force by use of counterweights being spring-mounted
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2250/00—General details of portable percussive tools; Components used in portable percussive tools
- B25D2250/091—Electrically-powered tool components
- B25D2250/095—Electric motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2250/00—General details of portable percussive tools; Components used in portable percussive tools
- B25D2250/245—Spatial arrangement of components of the tool relative to each other
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2250/00—General details of portable percussive tools; Components used in portable percussive tools
- B25D2250/371—Use of springs
- B25D2250/381—Leaf springs
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Percussive Tools And Related Accessories (AREA)
Abstract
【解決手段】 本発明にかかる作業工具としてのハンマドリルは、本体部103内において、駆動モータ111よりも運動変換部113側の空間であって、運動変換部113の外縁によって当該空間の内側が規定され、且つ駆動モータ111のモータ外郭によって当該空間の外側が規定される内部空間110に動吸振器151が配置された構成とされる。
【選択図】 図3
Description
ところで、振動低減効果を図るのに有効な上記動吸振器を工具本体に搭載した作業工具の設計に際しては、工具本体内の空きスペースを有効的に利用することによって、当該動吸振器を無理なく搭載することができ、以って作業工具全体が大型化するのを回避する技術が要請される。
運動変換部は、揺動部材及び駆動子を含み、先端工具の長軸方向に関し駆動モータよりも先端工具側に配設される構成とされる。揺動部材は、モータ出力軸の回転により先端工具の長軸方向に揺動動作する部材として構成される。駆動子は、モータ出力軸に平行に配置され、揺動部材の揺動のうちの長軸方向成分を介して先端工具の長軸方向に直線運動する部材として構成される。空気バネ室は、駆動子に連接する構成とされる。打撃子は、駆動子の直線運動により空気バネ室を介して、すなわち空気バネの作用によって先端工具を打撃する打撃部材として構成される。
内部空間は、工具本体内において、駆動モータよりも運動変換部側の空間であって、運動変換部の外縁によって当該空間の内側が規定され、且つ駆動モータのモータ外郭によって当該空間の外側が規定される空間として構成される。
動吸振器は、ウェイトと、当該ウェイトを工具本体に対して弾発状に支持する弾性部材を含む構成とされ、弾性部材によって弾発状に支持されたウェイトが弾性部材の弾発力に抗しながら先端工具の長軸方向に直線運動することで、加工作業時における前記工具本体の制振をなす。なお、本発明における「ウェイトの直線運動」に関しては、この直線運動方向が、先端工具の長軸方向のみに限られるものではなく、先端工具の長軸方向の成分を少なくとも有していれば足りる。また、この動吸振器は、上記内部空間に配置される構成とされる。
この作業工具における工具本体、駆動モータ、モータ出力軸、運動変換部、空気バネ室、打撃子及び動吸振器の構成に関しては、前述の工具本体、駆動モータ、モータ出力軸、運動変換部、空気バネ室、打撃子及び動吸振器の構成と同様とされる。
動力伝達部は、保持要素及び伝達ギアを含む構成とされる。保持要素は、先端工具の長軸方向に延在して先端工具を保持する要素として構成される。伝達ギアは、モータ出力軸の回転に伴って保持要素を軸まわりに回転させて前記先端工具を回転駆動する伝達ギアとして構成される。
内部空間は、工具本体内において、駆動モータよりも運動変換部側の空間であって、運動変換部の外縁或いは駆動モータのモータ外郭によって当該空間の内側が規定され、且つ伝達ギアのギア外郭によって当該空間の外側が規定される空間として構成される。そして、この内部空間に動吸振器が配置される。
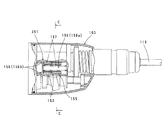
本発明にかかる作業工具の第1実施の形態に関しては、図1〜図3が参照される。図1は第1実施の形態のハンマドリル101の全体構成を示す側断面図である。また図2は、図1中のハンマドリル101につき図1とは別の部位の側断面を部分的に示す図である。図3は、図2中のハンマドリル101のA−A線に関する断面構造を示す図である。
次に、本発明にかかる作業工具の第2実施の形態につき説明する。この第2実施の形態は、第1実施の形態の動吸振器151の構成についての変更例であって、その他の構成に関しては第1実施の形態と同様である。この第2実施の形態に関しては、図4及び図5が参照される。図4には、第2実施の形態のハンマドリル101の側断面を部分的に示す図であり、図5は、図4中のハンマドリル101のB−B線に関する断面構造を示す図である。これら図4及び図5において、図1〜図3に示す構成要素と同一の構成要素には同一の符号を付している。
次に、本発明にかかる作業工具の第3実施の形態につき説明する。この第3実施の形態は、第1実施の形態の動吸振器151の構成についての変更例であって、その他の構成に関しては第1実施の形態と同様である。この第3実施の形態に関しては、図6及び図7が参照される。図6には、第3実施の形態のハンマドリル101の側断面を部分的に示す図であり、図7は、図6中のハンマドリル101のC−C線に関する断面構造を示す図である。これら図6及び図7において、図1〜図3に示す構成要素と同一の構成要素には同一の符号を付している。
次に、本発明にかかる作業工具の第4実施の形態につき説明する。この第4実施の形態は、第1実施の形態の動吸振器151の構成についての変更例であって、その他の構成に関しては第1実施の形態と同様である。この第4実施の形態に関しては、図8〜図10が参照される。図8には、第4実施の形態のハンマドリル101の側断面を部分的に示す図であり、図9は、図8中のハンマドリル101のD−D線に関する断面構造を示す図である。更に、図10には、図9に示す形態の類似の形態を示す断面構造が示される。これら図8〜図10において、図1〜図3に示す構成要素と同一の構成要素には同一の符号を付している。
次に、本発明にかかる作業工具の第5実施の形態につき説明する。この第5実施の形態は、第4実施の形態の動吸振器451の配置についての変更例であって、その他の構成に関しては第4実施の形態と同様である。この第5実施の形態に関しては、図11及び図12が参照される。図11は、第5実施の形態のハンマドリル101の側断面を部分的に示す図であり、図12は、図11中のハンマドリル101のE−E線に関する断面構造を示す図である。これら図11及び図12において、図8及び図9に示す構成要素と同一の構成要素には同一の符号を付している。
103 本体部(工具本体)
103a ブラケット
105 モータハウジング
107 ギアハウジング
109 ハンドグリップ
110 内部空間
111 駆動モータ
111a モータ出力軸
113 運動変換部
115 打撃要素
117 動力伝達部
119 ハンマビット(先端工具)
120 内部空間
121 駆動ギア
123 被動ギア
124 係合部材
125 被動軸
126 軸受
127 回転体
128 揺動ロッド
129 揺動リング
131 第1伝達ギア
133 第2伝達ギア
135 スリーブ
137 ツールホルダ
141 シリンダ
143 ストライカ
145 インパクトボルト
151,251,351,451,551,552,553,554 動吸振器
153 動吸振器本体
155 ウェイト
156 バネ収容空間(バネ収容部)
156a 第1バネ収容空間
156b 第2バネ収容空間
157 コイルバネ
157a バネ前端
157b バネ後端
158 バネ前端止着部
159 バネ後端止着部
455 ウェイト
457 板バネ
457a,457b バネ端部
Claims (5)
- 長軸の先端工具を直線状に駆動させて当該先端工具に所定の加工作業を遂行させる作業工具であって、
工具本体と、
前記工具本体に収容された駆動モータと、
前記先端工具の長軸方向に延在する前記駆動モータのモータ出力軸と、
前記モータ出力軸の回転により前記先端工具の長軸方向に揺動動作する揺動部材と、前記モータ出力軸に平行に配置され、前記揺動部材の揺動のうちの長軸方向成分を介して前記先端工具の長軸方向に直線運動する駆動子とを含み、前記先端工具の長軸方向に関し前記駆動モータよりも前記先端工具側に配設される運動変換部と、
前記駆動子に連接する空気バネ室と、
前記駆動子の直線運動により前記空気バネ室を介して前記先端工具を打撃する打撃子と、
前記工具本体内において、前記駆動モータよりも前記運動変換部側の空間であって、前記運動変換部の外縁によって当該空間の内側が規定され、且つ前記駆動モータのモータ外郭によって当該空間の外側が規定される内部空間と、
ウェイトと、当該ウェイトを前記工具本体に対して弾発状に支持する弾性部材とを含み、前記弾性部材によって弾発状に支持された前記ウェイトが前記弾性部材の弾発力に抗しながら前記先端工具の長軸方向に直線運動することで、加工作業時における前記工具本体の制振をなすとともに、前記内部空間に配置される動吸振器と、
を有することを特徴とする作業工具。 - 請求項1に記載の作業工具であって、
前記動吸振器は、前記内部空間において、前記先端工具の長軸方向と交差する方向に関する前記工具本体の断面に関し前記揺動部材と前記駆動子とを結ぶ線上から外れた位置に配置された構成であることを特徴とする作業工具。 - 請求項1または2に記載の作業工具であって、
前記弾性部材は、前記ウェイトを弾発状に支持するコイルバネとして構成され、
前記ウェイトは、当該ウェイトの前面側及び後面側の少なくとも一方において前記先端工具の長軸方向に凹み状に延在するバネ収容部を備え、前記バネ収容部が前記コイルバネの一端部を収容する構成であることを特徴とする作業工具。 - 長軸の先端工具を直線状に駆動させて当該先端工具に所定の加工作業を遂行させる作業工具であって、
工具本体と、
前記工具本体に収容された駆動モータと、
前記先端工具の長軸方向に延在する前記駆動モータのモータ出力軸と、
前記モータ出力軸の回転により前記先端工具の長軸方向に揺動動作する揺動部材と、前記モータ出力軸に平行に配置され、前記揺動部材の揺動のうちの長軸方向成分を介して前記先端工具の長軸方向に直線運動する駆動子とを含み、前記先端工具の長軸方向に関し前記駆動モータよりも前記先端工具側に配設される運動変換部と、
前記駆動子に連接する空気バネ室と、
前記駆動子の直線運動により前記空気バネ室を介して前記先端工具を打撃する打撃子と、
前記先端工具の長軸方向に延在して前記先端工具を保持する保持要素と、前記モータ出力軸の回転に伴って前記保持要素を軸まわりに回転させて前記先端工具を回転駆動する伝達ギアとを含む動力伝達部と、
前記工具本体内において、前記駆動モータよりも前記運動変換部側の空間であって、前記運動変換部の外縁或いは前記駆動モータのモータ外郭によって当該空間の内側が規定され、且つ前記伝達ギアのギア外郭によって当該空間の外側が規定される内部空間と、
ウェイトと、当該ウェイトを前記工具本体に対して弾発状に支持する弾性部材とを含み、前記弾性部材によって弾発状に支持された前記ウェイトが前記弾性部材の弾発力に抗しながら前記先端工具の長軸方向に直線運動することで、加工作業時における前記工具本体の制振をなすとともに、前記内部空間に配置される動吸振器と、
を有することを特徴とする作業工具。 - 請求項4に記載の作業工具であって、
前記動吸振器は、前記内部空間において、前記先端工具の長軸方向と交差する方向に関する前記工具本体の断面に関し前記駆動子から工具上側に外れた位置に配置された構成であることを特徴とする作業工具。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008177156A JP5336781B2 (ja) | 2008-07-07 | 2008-07-07 | 作業工具 |
| CN200910138197A CN101623861A (zh) | 2008-07-07 | 2009-05-08 | 作业工具 |
| US12/458,062 US8347981B2 (en) | 2008-07-07 | 2009-06-30 | Power tool |
| EP15178713.2A EP2962811B1 (en) | 2008-07-07 | 2009-07-03 | Power tool |
| EP09008781.8A EP2143530B1 (en) | 2008-07-07 | 2009-07-03 | Power tool |
| RU2009125998/02A RU2496632C2 (ru) | 2008-07-07 | 2009-07-06 | Приводной инструмент |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008177156A JP5336781B2 (ja) | 2008-07-07 | 2008-07-07 | 作業工具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010012586A true JP2010012586A (ja) | 2010-01-21 |
| JP5336781B2 JP5336781B2 (ja) | 2013-11-06 |
Family
ID=41092035
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008177156A Active JP5336781B2 (ja) | 2008-07-07 | 2008-07-07 | 作業工具 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8347981B2 (ja) |
| EP (2) | EP2143530B1 (ja) |
| JP (1) | JP5336781B2 (ja) |
| CN (1) | CN101623861A (ja) |
| RU (1) | RU2496632C2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013111460A1 (ja) * | 2012-01-26 | 2013-08-01 | 株式会社マキタ | 打撃工具 |
| JP2013212545A (ja) * | 2012-03-30 | 2013-10-17 | Hitachi Koki Co Ltd | 打撃工具 |
| WO2021100703A1 (ja) * | 2019-11-19 | 2021-05-27 | 京セラインダストリアルツールズ株式会社 | 電動工具 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5336781B2 (ja) * | 2008-07-07 | 2013-11-06 | 株式会社マキタ | 作業工具 |
| JP5496812B2 (ja) * | 2010-08-03 | 2014-05-21 | 株式会社マキタ | 作業工具 |
| DE102010040173A1 (de) | 2010-09-02 | 2012-03-08 | Hilti Aktiengesellschaft | Handwerkzeugmaschine |
| JP6278830B2 (ja) * | 2014-05-16 | 2018-02-14 | 株式会社マキタ | 打撃工具 |
| CN107107322B (zh) * | 2014-11-12 | 2020-05-08 | 株式会社牧田 | 冲击工具 |
| CN105881460A (zh) * | 2015-02-15 | 2016-08-24 | 苏州宝时得电动工具有限公司 | 动力工具 |
| US10661426B2 (en) * | 2016-02-19 | 2020-05-26 | Makita Corporation | Work tool with vibration dampers |
| EP3697574B1 (en) | 2017-10-20 | 2025-03-19 | Milwaukee Electric Tool Corporation | Percussion tool |
| EP3511365A1 (de) | 2018-01-15 | 2019-07-17 | LANXESS Deutschland GmbH | Hr glasfasern in schwingbauteilen |
| EP3511364A1 (de) | 2018-01-15 | 2019-07-17 | LANXESS Deutschland GmbH | Hr glasfasern in schwingbauteilen |
| CN214723936U (zh) | 2018-01-26 | 2021-11-16 | 米沃奇电动工具公司 | 冲击工具 |
| WO2019195508A1 (en) * | 2018-04-04 | 2019-10-10 | Milwaukee Electric Tool Corporation | Rotary hammer |
| JP7624319B2 (ja) * | 2021-02-04 | 2025-01-30 | 株式会社マキタ | 打撃工具 |
| JP7585085B2 (ja) * | 2021-02-22 | 2024-11-18 | 株式会社マキタ | 打撃工具 |
| US11642769B2 (en) * | 2021-02-22 | 2023-05-09 | Makita Corporation | Power tool having a hammer mechanism |
| JP7585091B2 (ja) * | 2021-03-03 | 2024-11-18 | 株式会社マキタ | 回転打撃工具 |
| JP2024007799A (ja) * | 2022-07-06 | 2024-01-19 | 株式会社マキタ | ハンマドリル |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004154903A (ja) * | 2002-11-07 | 2004-06-03 | Makita Corp | 作業工具 |
| JP2006062044A (ja) * | 2004-08-27 | 2006-03-09 | Makita Corp | 作業工具 |
| JP2007237301A (ja) * | 2006-03-07 | 2007-09-20 | Hitachi Koki Co Ltd | 電動工具 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2875731A (en) | 1956-03-23 | 1959-03-03 | Buckeye Steel Castings Co | Vibration absorbers for reciprocating tools |
| US3845827A (en) * | 1971-08-05 | 1974-11-05 | Stihl Maschf Andreas | Portable implement,especially motor chain saw |
| DE3540964A1 (de) * | 1985-11-19 | 1987-05-21 | Bosch Gmbh Robert | Motorisch angetriebenes handwerkzeug fuer bohrenden oder schlagbohrenden betrieb |
| JP3843914B2 (ja) * | 2002-08-27 | 2006-11-08 | 松下電工株式会社 | ハンマードリル |
| EP1415768A1 (de) | 2002-10-31 | 2004-05-06 | Atlas Copco Electric Tools GmbH | Schwingungstilger |
| DE602004026134D1 (de) * | 2003-04-01 | 2010-05-06 | Makita Corp | Kraftwerkzeug |
| WO2005105386A1 (ja) | 2004-04-30 | 2005-11-10 | Makita Corporation | 作業工具 |
| GB2433909B (en) | 2004-08-27 | 2008-09-03 | Makita Corp | Power tool |
| JP4326452B2 (ja) * | 2004-10-26 | 2009-09-09 | パナソニック電工株式会社 | 衝撃工具 |
| US8261851B2 (en) * | 2005-04-11 | 2012-09-11 | Makita Corporation | Electric hammer |
| US7383895B2 (en) * | 2005-08-19 | 2008-06-10 | Makita Corporation | Impact power tool |
| EP2012978B1 (en) * | 2006-03-07 | 2016-08-03 | Hitachi Koki Co., Ltd. | Electrical power tool |
| DE102006029363A1 (de) | 2006-06-27 | 2008-01-03 | Robert Bosch Gmbh | Elektrohandwerkzeug |
| JP4863942B2 (ja) | 2006-08-24 | 2012-01-25 | 株式会社マキタ | 打撃工具 |
| US8485274B2 (en) * | 2007-05-14 | 2013-07-16 | Makita Corporation | Impact tool |
| US7806201B2 (en) * | 2007-07-24 | 2010-10-05 | Makita Corporation | Power tool with dynamic vibration damping |
| US8196674B2 (en) * | 2008-03-05 | 2012-06-12 | Makita Corporation | Impact tool |
| JP5214343B2 (ja) * | 2008-06-19 | 2013-06-19 | 株式会社マキタ | 作業工具 |
| JP5336781B2 (ja) * | 2008-07-07 | 2013-11-06 | 株式会社マキタ | 作業工具 |
| JP5290666B2 (ja) * | 2008-08-29 | 2013-09-18 | 株式会社マキタ | 打撃工具 |
| JP5361504B2 (ja) * | 2009-04-10 | 2013-12-04 | 株式会社マキタ | 打撃工具 |
-
2008
- 2008-07-07 JP JP2008177156A patent/JP5336781B2/ja active Active
-
2009
- 2009-05-08 CN CN200910138197A patent/CN101623861A/zh active Pending
- 2009-06-30 US US12/458,062 patent/US8347981B2/en active Active
- 2009-07-03 EP EP09008781.8A patent/EP2143530B1/en active Active
- 2009-07-03 EP EP15178713.2A patent/EP2962811B1/en active Active
- 2009-07-06 RU RU2009125998/02A patent/RU2496632C2/ru active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004154903A (ja) * | 2002-11-07 | 2004-06-03 | Makita Corp | 作業工具 |
| JP2006062044A (ja) * | 2004-08-27 | 2006-03-09 | Makita Corp | 作業工具 |
| JP2007237301A (ja) * | 2006-03-07 | 2007-09-20 | Hitachi Koki Co Ltd | 電動工具 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013111460A1 (ja) * | 2012-01-26 | 2013-08-01 | 株式会社マキタ | 打撃工具 |
| JP2013151055A (ja) * | 2012-01-26 | 2013-08-08 | Makita Corp | 打撃工具 |
| US9724814B2 (en) | 2012-01-26 | 2017-08-08 | Makita Corporation | Impact tool |
| JP2013212545A (ja) * | 2012-03-30 | 2013-10-17 | Hitachi Koki Co Ltd | 打撃工具 |
| WO2021100703A1 (ja) * | 2019-11-19 | 2021-05-27 | 京セラインダストリアルツールズ株式会社 | 電動工具 |
| JPWO2021100703A1 (ja) * | 2019-11-19 | 2021-05-27 | ||
| JP7325530B2 (ja) | 2019-11-19 | 2023-08-14 | 京セラインダストリアルツールズ株式会社 | 電動工具 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100000751A1 (en) | 2010-01-07 |
| EP2962811B1 (en) | 2020-06-24 |
| JP5336781B2 (ja) | 2013-11-06 |
| RU2009125998A (ru) | 2011-01-20 |
| CN101623861A (zh) | 2010-01-13 |
| EP2962811A1 (en) | 2016-01-06 |
| EP2143530A1 (en) | 2010-01-13 |
| EP2143530B1 (en) | 2015-09-16 |
| US8347981B2 (en) | 2013-01-08 |
| RU2496632C2 (ru) | 2013-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5336781B2 (ja) | 作業工具 | |
| JP5214343B2 (ja) | 作業工具 | |
| JP4863942B2 (ja) | 打撃工具 | |
| RU2510326C2 (ru) | Ударный инструмент | |
| JP5128998B2 (ja) | 手持式作業工具 | |
| JP4195818B2 (ja) | 電動ハンマ | |
| JP4659737B2 (ja) | 作業工具 | |
| US8016047B2 (en) | Electrical power tool with anti-vibration mechanisms of different types | |
| CN104066556B (zh) | 冲击工具 | |
| EP2018939B1 (en) | Power tool with vibration damping mechanism | |
| JP5767511B2 (ja) | 往復動式作業工具 | |
| JP5147449B2 (ja) | 作業工具 | |
| WO2016076377A1 (ja) | 打撃工具 | |
| JP5009060B2 (ja) | 打撃工具 | |
| JP4805288B2 (ja) | 電動ハンマ | |
| JP6612496B2 (ja) | 打撃工具 | |
| JP2010052118A (ja) | 打撃工具 | |
| JP2013163234A (ja) | 打撃工具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130624 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130730 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130802 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5336781 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |