JP2010008055A - 駐車支援装置 - Google Patents
駐車支援装置 Download PDFInfo
- Publication number
- JP2010008055A JP2010008055A JP2008164151A JP2008164151A JP2010008055A JP 2010008055 A JP2010008055 A JP 2010008055A JP 2008164151 A JP2008164151 A JP 2008164151A JP 2008164151 A JP2008164151 A JP 2008164151A JP 2010008055 A JP2010008055 A JP 2010008055A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- vehicle
- wheel
- conversion coefficient
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
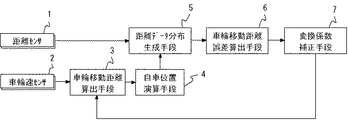
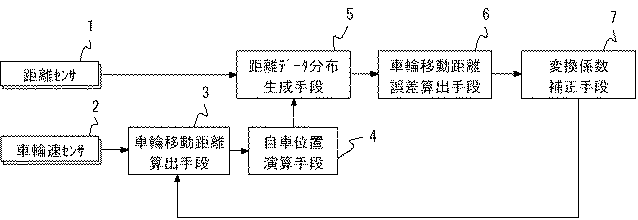
【解決手段】車輪速センサ2から計測されたパルス数に変換係数を乗ずることで車輪の移動距離を算出する車輪移動距離算出手段1と、車輪移動距離から自車両の位置を演算する自車位置演算手段4と、自車両の位置に基づき各距離センサ1によって得られた距離データの分布を各距離センサ1に対し生成する距離データ分布生成手段5と、各距離センサ1の距離データ分布を照合し、車輪の移動距離の誤差を算出する車輪移動距離誤差算出手段6と、車輪の移動距離の誤差に基づき車輪移動距離算出手段3にて用いられる変換係数を補正する変換係数補正手段7を備えている。
【選択図】図1
Description
(1)タイヤ空気圧の変化等によりタイヤ径が変化すると、車輪速センサから得られる車輪速に誤差が発生する。車輪速に誤差が発生すれば、車輪速に基づいて演算した自車両の移動距離に誤差が発生し、ひいては駐車区画の検知結果に誤差が発生することとなる。
(2)車輪速の誤差に左右のアンバランスが発生すると、車輪速に基づいて演算した自車両の移動方向に誤差が発生し、やはり駐車区画の検知結果に誤差が発生することになる。
以下、この発明の実施の形態1を図面に基づいて説明する。図1はこの発明の実施の形態1による駐車支援装置の構成を示すブロック図である。
図1において、距離センサ1は、車両と障害物の距離を計測するためのものであり、車両に所定の距離をおいて少なくとも2個搭載されている。車輪速センサ2は、左右の車輪に搭載され、車輪の回転に応じてパルスを生成する。車輪移動距離算出手段3は、車輪速センサ2から出力されたパルスを計測し、計測されたパルス数に変換係数を乗ずることで車輪の移動距離を算出する。自車位置演算手段4は、車輪移動距離算出手段3によって得られた左右の車輪の移動距離に基づいて自車位置を演算する。距離データ分布生成手段5は、自車位置演算手段4によって得られた自車位置に基づき、距離センサ1によって得られた距離データの分布を、各距離センサ1に対して生成する。車輪移動距離誤差算出手段6は、各距離センサ1に対し生成された複数の距離データ分布を照合し、車輪の移動距離の誤差を算出する。変換係数補正手段7は、車輪移動距離誤差算出手段6によって得られた車輪の移動距離の誤差に基づき、車輪移動距離算出手段3で用いられる前記変換係数を補正する。本実施の形態では、距離センサ1として超音波センサを用いることとするが、レーザレーダなど他の距離センサでもよい。また、本実施の形態では、車輪速センサ2は転舵しない従動輪(後輪)に搭載し、自車位置とは従動輪の中心の位置を指すものとするが、この限りではない。
また、図2において、11は自車両を示し、12は車両前方の側面に搭載された距離センサS1の検知範囲、13は車両後方のコーナーに搭載された距離センサS2の検知範囲を示す。
左右の車輪速差が所定値以内であるかどうかを判定するのは、車両がほぼ直進しているかどうかを判定するためである。車速が所定値以下であり、かつ、左右の車輪速の差が所定値以内である場合は、S103の処理に移る。
上記発明の実施の形態1では、左右の車輪速センサから得られたパルス数に左右の車輪で共通の変換係数αを乗じて各車輪の移動距離を算出した。しかし、本実施の形態2のように、左右独立して別々の変換係数を保持し、左車輪の変換係数αLは車両左側に搭載された少なくとも2個の距離センサに対する距離データ分布に基づき補正し、右車輪の変換係数αRは車両右側に搭載された少なくとも2個の距離センサに対する距離データ分布に基づき補正してもよい。
上記実施の形態1または実施の形態2では、距離センサS1として車両前方の側面に搭載した超音波センサを、距離センサS2として車両後方のコーナーに搭載した超音波センサを用いた。本実施の形態では、距離センサS1として車両前方のコーナーに搭載した超音波センサを、距離センサS2として車両後方のコーナーに搭載した超音波センサを用いた。本実施の形態の距離センサS1と距離センサS2の検知範囲を図8に示す。図8において、11は自車両を示し、71は車両前方のコーナーに搭載した距離センサ(超音波センサ)S1の検知範囲、13は車両後方のコーナーに搭載された距離センサ(超音波センサ)S2の検知範囲を示す。
上記実施の形態では、車両がほぼ直進しているかどうかを判定するために、車輪速センサから出力されるパルスに基づき算出された左右の車輪速の差が所定値以下であるかどうかで判定していたが、カーナビゲーションシステム等を搭載している車両であれば、車両に内蔵されている加速度センサの情報を利用し、当該加速度センサの横加速度が所定値以下の場合にのみ、変換係数補正手段による変換係数の補正を実施してもよい。
自動操舵により車両を検知した駐車区画へ誘導する機能を有する車両では、ハンドル角センサが搭載されている。本実施の形態では、車両がほぼ直進しているかどうかの判定に、このハンドル角センサの情報を利用し、ハンドル角の絶対値が所定値以下である場合に変換係数補正手段による変換係数の補正を実施してもよい。
4 自車位置演算手段、5 距離データ分布生成手段、6 車輪移動誤差算出手段、
7 変換係数補正手段。
Claims (8)
- 所定の距離をおいて車両に搭載され、障害物までの距離を測定する少なくとも2個の距離センサと、
上記車両の車輪に搭載され、当該車輪の回転に応じてパルスを出力する車輪速センサと、
上記車輪速センサから出力される上記パルスを計測し、計測されたパルス数に変換係数を乗ずることで上記車輪の移動距離を算出する車輪移動距離算出手段と、
上記車輪移動距離算出手段によって得られた上記車輪の移動距離から自車両の位置を演算する自車位置演算手段と、
上記自車位置演算手段によって得られた上記自車両の位置に基づき、上記距離センサによって得られた距離データの分布を上記各距離センサに対し生成する距離データ分布生成手段と、
上記距離データ分布生成手段によって生成された上記各距離センサの距離データ分布を照合し、上記車輪移動距離算出手段によって得られた上記車輪の移動距離の誤差を算出する車輪移動距離誤差算出手段と、
上記車輪移動距離誤差算出手段によって得られた上記車輪の移動距離の誤差に基づき、上記車輪移動距離算出手段にて用いられる上記変換係数を補正する変換係数補正手段を備えたことを特徴とする駐車支援装置。 - 上記距離センサは上記車両の左右両側にそれぞれ少なくとも2個ずつ搭載されると共に、上記変換係数は左右独立して1つずつ保持し、上記左側の変換係数は上記車両左側に搭載された上記距離センサの情報を用いて補正し、上記右側の変換係数は上記車両右側に搭載された上記距離センサの情報を用いて補正することを特徴とする請求項1に記載の駐車支援装置。
- 上記距離センサは、上記車両前方の側面に搭載された距離センサと、上記車両後方のコーナーに搭載された距離センサであることを特徴とする請求項1または請求項2に記載の駐車支援装置。
- 上記距離センサは、上記車両前方のコーナーに搭載された距離センサと、上記車両後方のコーナーに搭載された距離センサであることを特徴とする請求項1または請求項2に記載の駐車支援装置。
- 上記変換係数補正手段による上記変換係数の補正は、上記車両の車速が所定値以下である場合に実施することを特徴とする請求項1から請求項4のいずれか1項に記載の駐車支援装置。
- 上記変換係数補正手段による上記変換係数の補正は、上記車輪速センサから出力されるパルスに基づき算出された左右の車輪速の差が所定値以下である場合に実施することを特徴とする請求項1から請求項5のいずれか1項に記載の駐車支援装置。
- 上記変換係数補正手段による上記変換係数の補正は、上記車両に搭載された加速度センサによって得られる横加速度が所定値以下である場合に実施することを特徴とする請求項1から請求項6のいずれか1項に記載の駐車支援装置。
- 上記変換係数補正手段による上記変換係数の補正は、上記車両に搭載されたハンドル角センサによって得られるハンドル角の絶対値が所定値以下である場合に実施することを特徴とする請求項1から請求項7のいずれか1項に記載の駐車支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164151A JP4646045B2 (ja) | 2008-06-24 | 2008-06-24 | 駐車支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164151A JP4646045B2 (ja) | 2008-06-24 | 2008-06-24 | 駐車支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010008055A true JP2010008055A (ja) | 2010-01-14 |
| JP4646045B2 JP4646045B2 (ja) | 2011-03-09 |
Family
ID=41588758
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008164151A Expired - Fee Related JP4646045B2 (ja) | 2008-06-24 | 2008-06-24 | 駐車支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4646045B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130128892A (ko) * | 2012-05-18 | 2013-11-27 | 현대모비스 주식회사 | 주차 경로 오차를 최소화한 자동 주차 보조 시스템 및 주차 경로 산출시 오차 최소화 방법 |
| WO2014013861A1 (ja) * | 2012-07-18 | 2014-01-23 | アイシン精機株式会社 | 駐車支援装置 |
| US20140236412A1 (en) * | 2013-02-20 | 2014-08-21 | Electronics And Telecommunications Research Institute | Apparatus and method for automatically parking vehicle |
| CN106364484A (zh) * | 2015-07-20 | 2017-02-01 | 现代自动车株式会社 | 用于校正停车导向线的停车转向辅助系统及方法 |
| US10026239B2 (en) | 2015-12-09 | 2018-07-17 | Hyundai Motor Company | Apparatus and method for failure diagnosis and calibration of sensors for advanced driver assistance systems |
| CN110709302A (zh) * | 2017-06-13 | 2020-01-17 | 日立汽车系统株式会社 | 车辆控制装置 |
| WO2020249894A1 (fr) * | 2019-06-13 | 2020-12-17 | Psa Automobiles Sa | Système de stationnement automatique d'un véhicule |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002183719A (ja) * | 2000-12-13 | 2002-06-28 | Nissan Motor Co Ltd | 車両用周囲検出装置 |
| JP2003312414A (ja) * | 2002-04-25 | 2003-11-06 | Equos Research Co Ltd | 駐車支援装置 |
| JP2004210172A (ja) * | 2003-01-07 | 2004-07-29 | Toyota Industries Corp | 駐車支援装置 |
| JP2007145246A (ja) * | 2005-11-29 | 2007-06-14 | Denso Corp | 車両ドア接触回避支援装置 |
| JP2009040319A (ja) * | 2007-08-10 | 2009-02-26 | Alpine Electronics Inc | 運転支援装置 |
-
2008
- 2008-06-24 JP JP2008164151A patent/JP4646045B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002183719A (ja) * | 2000-12-13 | 2002-06-28 | Nissan Motor Co Ltd | 車両用周囲検出装置 |
| JP2003312414A (ja) * | 2002-04-25 | 2003-11-06 | Equos Research Co Ltd | 駐車支援装置 |
| JP2004210172A (ja) * | 2003-01-07 | 2004-07-29 | Toyota Industries Corp | 駐車支援装置 |
| JP2007145246A (ja) * | 2005-11-29 | 2007-06-14 | Denso Corp | 車両ドア接触回避支援装置 |
| JP2009040319A (ja) * | 2007-08-10 | 2009-02-26 | Alpine Electronics Inc | 運転支援装置 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101940727B1 (ko) * | 2012-05-18 | 2019-01-22 | 현대모비스 주식회사 | 주차 경로 오차를 최소화한 자동 주차 보조 시스템 및 주차 경로 산출시 오차 최소화 방법 |
| KR20130128892A (ko) * | 2012-05-18 | 2013-11-27 | 현대모비스 주식회사 | 주차 경로 오차를 최소화한 자동 주차 보조 시스템 및 주차 경로 산출시 오차 최소화 방법 |
| WO2014013861A1 (ja) * | 2012-07-18 | 2014-01-23 | アイシン精機株式会社 | 駐車支援装置 |
| JP2014019305A (ja) * | 2012-07-18 | 2014-02-03 | Aisin Seiki Co Ltd | 駐車支援装置 |
| US20140236412A1 (en) * | 2013-02-20 | 2014-08-21 | Electronics And Telecommunications Research Institute | Apparatus and method for automatically parking vehicle |
| CN106364484A (zh) * | 2015-07-20 | 2017-02-01 | 现代自动车株式会社 | 用于校正停车导向线的停车转向辅助系统及方法 |
| CN106364484B (zh) * | 2015-07-20 | 2019-09-10 | 现代自动车株式会社 | 用于校正停车导向线的停车转向辅助系统及方法 |
| US10026239B2 (en) | 2015-12-09 | 2018-07-17 | Hyundai Motor Company | Apparatus and method for failure diagnosis and calibration of sensors for advanced driver assistance systems |
| CN110709302A (zh) * | 2017-06-13 | 2020-01-17 | 日立汽车系统株式会社 | 车辆控制装置 |
| WO2020249894A1 (fr) * | 2019-06-13 | 2020-12-17 | Psa Automobiles Sa | Système de stationnement automatique d'un véhicule |
| FR3097185A1 (fr) * | 2019-06-13 | 2020-12-18 | Psa Automobiles Sa | Système de stationnement automatique d’un véhicule |
| CN113950441A (zh) * | 2019-06-13 | 2022-01-18 | 标致雪铁龙汽车股份有限公司 | 车辆的自动泊车系统 |
| CN113950441B (zh) * | 2019-06-13 | 2024-08-02 | 标致雪铁龙汽车股份有限公司 | 车辆的自动泊车系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4646045B2 (ja) | 2011-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4646045B2 (ja) | 駐車支援装置 | |
| US8686875B2 (en) | Parking support device | |
| CN105539437B (zh) | 对象检测装置 | |
| CN101484344B (zh) | 用于支持车辆停车过程的方法 | |
| JP4598048B2 (ja) | 駐車支援装置 | |
| US10466064B2 (en) | Odometry method for determining a position of a motor vehicle, control device and motor vehicle | |
| CN102372000A (zh) | 获取泊车位参数的装置和系统 | |
| CN101218516A (zh) | 目标检测设备及方法 | |
| JP6289546B2 (ja) | 駐車支援装置 | |
| JP2013054614A (ja) | 運転支援装置 | |
| KR20140104611A (ko) | 차량의 자동 주차 장치 및 이를 이용한 방법 | |
| JP2014054912A (ja) | 駐車支援システム | |
| JP2019007934A (ja) | 車両用の対象物検出装置および車両用の対象物検出装置における水平方向の軸ずれ判定方法 | |
| JP6279446B2 (ja) | 車上装置及び走行情報補正方法 | |
| WO2018230176A1 (ja) | 車両制御装置 | |
| CN105083374A (zh) | 用于控制后轮转向的方法 | |
| JP4875134B2 (ja) | 駐車支援装置 | |
| KR20160059823A (ko) | 차선 유지보조 시스템 및 방법 | |
| JP2011248532A (ja) | 先行車検出装置 | |
| JP5591185B2 (ja) | 車両の位置姿勢測定装置 | |
| KR101244475B1 (ko) | 주차 제어 방법 및 시스템 | |
| JP6256795B2 (ja) | 障害物検知装置 | |
| CN114248843B (zh) | 借助轮速度量确定转向参考状态 | |
| JP3979931B2 (ja) | 物標速度算出装置及びこれを使用する車両制御装置 | |
| JPH1195837A (ja) | ジャイロ誘導式無人搬送車の初期台車位置及び初期台車姿勢角決定方法並びに位置補正時の走行安定性の改善方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101116 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101130 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4646045 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |