JP2010000019A - 施肥装置 - Google Patents
施肥装置 Download PDFInfo
- Publication number
- JP2010000019A JP2010000019A JP2008160200A JP2008160200A JP2010000019A JP 2010000019 A JP2010000019 A JP 2010000019A JP 2008160200 A JP2008160200 A JP 2008160200A JP 2008160200 A JP2008160200 A JP 2008160200A JP 2010000019 A JP2010000019 A JP 2010000019A
- Authority
- JP
- Japan
- Prior art keywords
- mud
- fertilizer
- measuring
- fertilization
- electrical conductivity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000003337 fertilizer Substances 0.000 title claims abstract description 88
- 230000004720 fertilization Effects 0.000 claims abstract description 57
- 239000002689 soil Substances 0.000 claims abstract description 33
- 230000035558 fertility Effects 0.000 claims abstract description 32
- 238000005259 measurement Methods 0.000 claims description 16
- 230000007423 decrease Effects 0.000 claims description 10
- 238000009331 sowing Methods 0.000 claims description 3
- 238000000034 method Methods 0.000 description 12
- 238000003860 storage Methods 0.000 description 9
- 241000209094 Oryza Species 0.000 description 6
- 235000007164 Oryza sativa Nutrition 0.000 description 6
- 235000009566 rice Nutrition 0.000 description 6
- 238000007542 hardness measurement Methods 0.000 description 4
- 241000196324 Embryophyta Species 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000005527 soil sampling Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 239000004020 conductor Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 231100000502 fertility decrease Toxicity 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
Images



Landscapes
- Fertilizing (AREA)
- Transplanting Machines (AREA)
Abstract
走行手段が走行した「位置情報:P」に関連付けて「泥部の電気伝導度:EC」、「泥部の深度:D」「泥部の硬度:H」を取得したら(101)、「泥部の硬度:H」が軟らかいと「施肥量:Y」を0とし(107、108)、さらに「泥部の電気伝導度:EC」と「泥部の深度:D」とから「肥沃度:F」を算出するとともに(109)、この「肥沃度:F」に基づいて「施肥量:Y」を算出する(111)。
【効果】 土壌特性に応じた施肥を行うことができ、かつ効率的に施肥を行うことができる。
【選択図】 図4
Description
このような施肥装置として、水田の硬盤層から水田表面までの距離を検出する水田深さ検出装置を備えたものが知られ、水田の深さが深くなると施肥量を少量にするようになっている(特許文献1)
また、予め土壌サンプリング車などによって土壌データとその測定位置とを記憶しておき、この測定結果に応じて施肥量を変化させながら施肥を行う施肥装置も知られている(特許文献2)。
しかしながら、水田によっては場所毎に土壌特性が異なっている場合があり、均一に施肥をした場合、場所によっては過剰施肥となって倒伏や米品質が低下することがあるなど、同じ水田でも品質のばらつきが発生するという問題があった。
また、特許文献2の施肥装置では、予め土壌データを土壌サンプリング車などによって収集しなければならず、リアルタイムに土壌特性を測定して施肥を行うことができないものであった。
このような問題に鑑み、本発明は土壌特性に応じた施肥を行うことができ、かつ効率的に施肥を行うことの可能な施肥装置を提供するものである。
上記測定手段は、土壌特性としての泥部の深度を測定する深度測定手段と、土壌特性としての泥部の電気伝導度を測定する電気伝導度測定手段とを備え、
さらに、上記泥部の深度および電気伝導度とから肥沃度を求めるとともに、該肥沃度に応じて上記施肥手段による施肥量を制御する制御手段を設けたことを特徴としている。
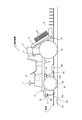
上記水田Fは、走行手段2が走行する硬盤層Faの上に泥部Fbが形成された状態となっており、走行手段2は泥部Fbに沈んだ状態で硬盤層Fa上を走行するようになっている。また本実施例では、通常は張られている泥部Fbの上部の水が予め抜かれている。
そして上記施肥装置1によれば、走行手段2が水田Fを走行すると、上記測定手段5が走行した部分の泥部Fbの土壌特性を測定し、制御手段6で泥部Fbの肥沃度を求めるとともに、施肥手段4を制御して土壌特性に応じた適切な量の肥料を施肥し、併せて上記植付手段3により苗Rの植付を行うようになっている。
このようにすることで、水田F全体の土壌特性を均一とすることができ、また土壌特性の測定と同時に苗Rの植付を行うことができるので、安定した収穫を期待できるとともに効率的な農作業を行うことができる。
上記植付手段3は従来公知であって詳細な説明は省略するが、苗Rを走行手段2の幅方向に等間隔に植付けるととともに、走行手段2の走行速度に応じて所定間隔で苗Rを植えるようになっている。
また走行手段2には、走行手段2の位置を測定する位置測定手段7と、走行手段2の絶対速度を測定する速度測定手段8とが設けられている。
位置測定手段7にはGPS(Global Positioning System)を用いることができ、走行手段2が水田Fを走行すると、該走行手段2の位置情報を順次取得するようになっている。
上記速度測定手段8は、超音波速度計など、水田Fの表面に対する走行手段2の対地絶対速度を測定するセンサであって、走行手段2が備える速度計では、泥部Fbにより車輪が空転すると正確な速度が測定できないことから、速度測定手段8による絶対速度を測定するようになっている。
このような施肥手段4は、植付手段3で植えつけられる苗Rの列数に応じて設けられ、上記ノズル13は苗Rが植付けられる位置をめがけて肥料を散布するようになっている。
また、本実施例では、上記ノズル13は上記植付手段3よりも前方に設けられており、走行手段2が走行すると、先にノズル13から肥料を散布し、その後植付手段3が肥料の散布された位置に苗Rを植付けるようになっている。
なお、ノズル13を植付手段3の植付位置近傍に位置させ、植付と同時に施肥するようにしても良く、施肥手段4で施肥する肥料は粒状に限らず、液状であっても良い。
上記深度測定手段14は、上記走行手段2の下面に設けられた第1ポテンショメータ14aと、第1ポテンショメータ14aに回転可能に設けられた第1ロッド14bと、該第1ロッド14bの先端に設けられたフロート14cとから構成されている。
フロート14cは泥部Fbの表面に浮上するようになっており、泥部Fbの深さが変化して走行手段2の位置が上下に変動すると、走行手段2に対して相対的に上下動するようになっている。
走行手段2に対してフロート14cが上下動することにより、上記第1ロッド14bが第1ポテンショメータ14aを中心に回転し、第1ポテンショメータ14aはこの第1ロッド14bの回転角度に基づいて泥部Fbの深さの変化を測定する。
上記電極15aは、走行手段2に対して絶縁状態で車輪2aに固定されており、その外径は車輪2aと略同径もしくは若干小径となっている。このため、泥部Fbには電極15aの一部が常時沈下しており、この沈下量は上記沈下センサによって測定される。
このように、本実施例の電気伝導度測定手段15は2つの電極15aを備えており、いわゆる2端子法により電気伝導度を測定するようになっている。
具体的には、上記電流発生手段が一方の電極15aに電流を印加すると、この電流は泥部Fbを介して他方の電極15aに流れ、上記電圧測定手段は2つの電極15a,15a間の電圧を測定する。
そして、電気伝導度算出手段は、上記沈下センサによる電極15aの沈下量と、2つの電極15a,15a間を流れる電流値と、電圧測定手段が測定した電圧とから、泥部Fbの電気伝導度を算出するようになっている。
なお、上記電極15aとして、車輪2aが導電体である場合には上記電極15aに代えて該車輪2aをそのまま用いることが可能である。
上記第2ロッド16bは第2ポテンショメータ16aから下方に向けて設けられており、走行手段2の進行方向前方に付勢された状態で、その下端が泥部Fb内に挿入されるようになっている。
このような構成により、走行手段2が走行すると、泥部Fbの抵抗によって第2ロッド16bの下端が後方に押され、これにより第2ロッド16bが第2ポテンショメータ16aに対して回転するので、第2ポテンショメータ16aはこの第2ロッド16bの回転角度に基づいて泥部Fbの硬さの変化を測定する。
なお、第2ポテンショメータ16aに代えて、歪センサやロードセルを設け、泥部Fbの抵抗により、第2ロッド16bに印加された応力を検出して、硬さの変化を測定するようにしてもよい。
信号処理部21は、それぞれ位置測定手段7、速度測定手段8、深度測定手段14、電気伝導度測定手段15、硬軟測定手段16から、それぞれ走行手段2の位置情報および絶対速度、泥部Fbの深度、泥部Fbの電気伝導度、泥部Fbの硬さの情報を入力し、処理するようになっている。
施肥量算出部22では、水田Fの各位置ごとに、上記深度測定手段14、電気伝導度測定手段15、硬軟測定手段16が測定した各土壌特性に関するデータから、後述する手順で施肥量を算出するようになっている。
上記施肥手段制御部23は、上記施肥手段4の送出手段12を制御し、上記施肥量算出部22が算出した施肥量に応じて上記施肥手段4による施肥量を制御するようになっている。
上記植付手段制御部24は、上記速度測定手段8による走行手段2の絶対速度に基づいて、苗Rを等間隔で植付るよう、上記植付手段3の動作を制御するようになっている。
上記記憶部25には、位置測定手段7が測定した位置情報とともに、その位置情報に関する上記土壌特性のデータや施肥量を記憶し、また以下に説明する施肥量の算出に使用する各定数などを記憶し、さらに、過去の土壌特性の測定データや施肥量を記憶するようになっている。
上記入力表示手段26は、上記測定手段5による測定結果や上記施肥量算出部22が算出した施肥量などを表示するモニタや、上記記憶部25に施肥量の算出に使用する各定数などを登録するための入力手段を備えている。
最初に、作業者の操作により走行手段2が水田F内に入ると、上記位置測定手段7が走行手段2の位置を測定し、この「位置情報:P」が制御手段6の信号処理部21を介して施肥量算出部22に取得される。
これと同時に、上記深度測定手段14、電気伝導度測定手段15、硬軟測定手段16がそれぞれ「泥部の電気伝導度:EC」、「泥部の深度:D」、「泥部の硬度:H」を測定し、それぞれ信号処理部21を介して施肥量算出部22に取得される(101)。
これらのデータが記憶部25に記憶されていない場合には、そのまま後述する手順(107)に移行し、これら過去のデータが記憶されている場合には、これに基づいて水田Fの中の各位置ごとに「過去の肥沃度:Fo」を算出する(103)。このときの計算式は以下の通りである。
Fo=ECo×Do…(式1)
次に、水田Fの中の各位置毎の「過去の肥沃度:Fo」から、水田F全体の「過去の肥沃度の平均値:Fa」および「過去の肥沃度の標準偏差:Fd」を算出する(104)。
さらに、施肥量算出部22は「位置情報:P」に関連付けられた「過去の硬度:Ho」を呼び出すとともに、あわせて水田F全体の「過去の硬度の平均値:Ha」および「過去の硬度の標準偏差:Hd」をそれぞれ算出する(105)。ここで、過去のデータとしては直近のデータを用いることが望ましい。
そして、施肥量算出部22は「肥沃度の基準値:Fs」を算出する(106)。このときの計算式は以下の通りである。
Fs=Fa(1+C)…(式2)
ここで、Cは任意定数で適宜変更可能であり、通常は0に設定されている。
なお上記「肥沃度の基準値:Fs」については、別途測定した水田Fの土壌特性などから、推定した値を使用することも可能である。さらには、これらの値の算出を予め作業前に行っておくことで、施肥量の算出時間を短縮できる。
H>A×Ht…(式3)
ここで、Aは任意定数で適宜変更可能であり、通常は1に設定されている。またHtは「泥部の硬度の閾値」を示し、使用する水田Fの土壌特性にあわせて個別に設定可能な経験値等のパラメータとなっている。
そして、「泥部の硬度:H」が上記条件式を満たさない場合、施肥量算出部22は「施肥量:Y」を0とする(108)。
すなわち、設定した閾値を下回る程度に泥部15bが軟らかい場合には、稲が高く伸びることで倒伏しやすくなることから、施肥をせず生育を抑えるようにしている。なお、この場合に施肥量を0とはせずに少なくして、最低限の肥料を施肥するように設定することも可能である。
F=EC×D…(式4)
上記式4により、本実施例では「泥部の電気伝導度:EC」が高くなるに応じて肥沃度が高く、低くなるに応じて肥沃度が低くなるように算出され、また「泥部の深度:D」が深くなるに応じてい肥沃度が高く、浅くなるに応じて肥沃度が低くなるように算出されるようになっている。
「肥沃度:F」が「肥沃度の閾値:Ft」を越える場合、その位置の泥部Fbは十分に肥沃であると考えられるので、この場合、施肥量算出部22は過剰施肥とならないよう、「施肥量:Y」を0とする(108)。
Y=K[1−N{(F−Fs)/Fd}]…(式5)
ここで、「施肥量:Y」は一苗あたりの施肥量であり、Nは施肥量増減の可変パラメータであって任意に設定可能な数値である。
上記式5により、本実施例では「肥沃度:F」が高くなるに応じて施肥量を少なく、低くなるに応じて施肥量を多くするように「施肥量:Y」が算出されるようになっている。
なお、上記式5において、「過去の肥沃度の標準偏差:Fd」を、上記「肥沃度の基準値:Fs」としてもよい。
Y=K[1−L{(D−Ds)/Ds}]…(式6)
ここで、「施肥量:Y」とは一苗あたりの施肥量である。また、Dsは田起こし、代掻きをする際の泥部15bの深度の設計値、あるいは目標値である。さらに、Lは施肥量増減の可変パラメータであって任意に設定可能な数値である。そしてKは一苗あたりの慣行施肥量(kg/10a)であって株密度や環境保全を考慮した施肥量の最大値を言う。
上記式6のように、本実施例では「泥部の深度:D」が深いときには施肥量が少なく、浅いときには施肥量が多くなるように「施肥量:Y」が算出されるようになっている。
これにより、次回の施肥の際にはこの記憶部25に記憶したこれらのデータを使用することができ、また、記憶部25に記憶されたデータを用いて水田Fの土壌特性や施肥量に関する水田F全体についての分布図等のマップを作成することができ、効率的な稲の育成のための分析を行うことができる。
このとき、走行手段2は泥部Fbにより車輪2aがスリップする場合があるため、車輪2aの回転に基づく速度に基づいて施肥や植付を行うと、これらの間隔が一定とはならなくなる。
このため、施肥手段制御部23は上記速度測定手段8により走行手段2の絶対速度を用いて、施肥手段4により等間隔に施肥を行うようにし、さらに上記植付手段制御部24は、上記施肥手段4が施肥した位置に苗Rを植えつけるようになっている。
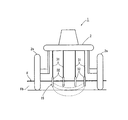
上記電極32の一部は泥部Fb内に挿入されるようになっており、走行手段2の走行に伴って回転するとともに、該電極32の沈下量は図示しない沈下センサによって測定されている。
このように、本実施例の電気伝導度測定手段15は4つの電極32を備えており、いわゆる4端子法により電気伝導度を測定するようになっている。
具体的には、上記電流発生手段は外側に位置する2つの電極32の間で電流を流し、上記電圧測定手段は内側に位置する2つの電極32間の電圧を測定するようになっている。
そして、電気伝導度算出手段15は、上記沈下センサによる電極32の沈下量と、電圧測定手段が測定した電圧とから、泥部Fbの電気伝導度を算出するようになっている。
なお、円盤状の電極32を省略し、ステー31の先端部分を電極として直接泥部15bに挿入した構成や、外側の2つの電極32を第1実施例のように両側の車輪2aに設け、内側の2つの電極32をこれらの間に設けた2つのステー31の先端に設けた構成としてもよい。
また、このようなステー31および円盤状の電極32を使用した構成において、上記第1実施例のような2端子法による電気伝導度測定手段15を構成することも可能である。
さらに、硬軟測定手段16の第2ロッド16bをステー31として利用することも可能である。
また、上記植付手段3に代えて、水田Fに種を播く播種手段を設けてもよく、また稲だけに限らず、その他水耕作物にも使用することができる。
さらに、上記実施例では水田Fから水を抜いた状態での使用について説明したが、水田Fに水を張った状態で使用する場合は、上記施肥手段4のノズル13の先端を泥部Fbの内部に挿入した状態で施肥を行うことで、泥部Fbに十分に施肥を行うことができる。
3 植付手段 4 施肥手段
5 測定手段 14 深度測定手段
15 電気伝導度測定手段 16 硬軟測定手段
Claims (8)
- 硬盤層上の泥部を走行する走行手段と、上記泥部の土壌特性を測定する測定手段と、泥部に肥料を施す施肥手段とを備えた施肥装置において、
上記測定手段は、土壌特性としての泥部の深度を測定する深度測定手段と、土壌特性としての泥部の電気伝導度を測定する電気伝導度測定手段とを備え、
さらに、上記泥部の深度および電気伝導度とから肥沃度を求めるとともに、該肥沃度に応じて上記施肥手段による施肥量を制御する制御手段を設けたことを特徴とする施肥装置。 - 上記肥沃度は、泥部の深度が深くなるに応じて高く、泥部の電気伝導度が高くなるに応じて高くなり、泥部の深度が浅くなるに応じて低く、泥部の電気伝導度が低くなるに応じて低くなるよう算出され、
上記制御手段は、肥沃度が高くなるに応じて上記施肥手段による施肥量を少なくし、もしくは施肥をせず、肥沃度が低くなるに応じて施肥量を多くするよう制御することを特徴とする請求項1に記載の施肥装置。 - 上記測定手段は、土壌特性としての泥部の硬軟を測定する硬軟測定手段を備え、上記制御手段は、上記泥部の硬軟に応じて上記施肥手段による施肥量を制御することを特徴とする請求項1または請求項2のいずれかに記載の施肥装置。
- 上記制御手段は、泥部が軟らかい場合には、施肥量を少なくするもしくは施肥をしないことを特徴とする請求項3に記載の施肥装置。
- 上記走行手段の位置を測定する位置測定手段を設け、
上記制御手段は、位置測定手段が測定した各位置毎に、上記測定手段が測定した土壌特性を記憶するとともに、同じ位置における過去の土壌特性を加味して施肥量を算出することを特徴とする請求項1ないし請求項4のいずれかに記載の施肥装置。 - 上記電気伝導度測定手段は、泥部に挿入される2つの電極を備え、2つの電極間の泥部の電気伝導度を測定することを特徴とする請求項1ないし請求項5のいずれかに記載の施肥装置。
- 上記電気伝導度測定手段は、所定間隔で走行手段に設けられて泥部に挿入される4つの電極を備え、外側の2つの電極間に電流を流すとともに、内側の2つの電極間の電圧を測定して泥部の電気伝導度を測定することを特徴とする請求項1ないし請求項5のいずれかに記載の施肥装置。
- 上記走行手段に、苗の植付けを行う植付手段または、種を播く播種手段のいずれかを設け、上記施肥手段による施肥と同時に、苗の植付けまたは種を播くことを特徴とする請求項1ないし請求項7のいずれかに記載の施肥装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008160200A JP5704293B2 (ja) | 2008-06-19 | 2008-06-19 | 施肥装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008160200A JP5704293B2 (ja) | 2008-06-19 | 2008-06-19 | 施肥装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010000019A true JP2010000019A (ja) | 2010-01-07 |
| JP5704293B2 JP5704293B2 (ja) | 2015-04-22 |
Family
ID=41582266
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008160200A Active JP5704293B2 (ja) | 2008-06-19 | 2008-06-19 | 施肥装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5704293B2 (ja) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012055212A (ja) * | 2010-09-08 | 2012-03-22 | Ishikawa Prefecture | 苗移植機 |
| JP2013146219A (ja) * | 2012-01-19 | 2013-08-01 | Ishikawa Prefecture | 施肥作業機 |
| CN104472088A (zh) * | 2014-11-13 | 2015-04-01 | 沈阳远大科技园有限公司 | 利用检测施肥溶液及土壤中ec值确定植物施肥量的方法 |
| JP2015159739A (ja) * | 2014-02-26 | 2015-09-07 | 井関農機株式会社 | 苗移植機 |
| JP2016086669A (ja) * | 2014-10-30 | 2016-05-23 | 井関農機株式会社 | 苗移植機 |
| JP2017153382A (ja) * | 2016-02-29 | 2017-09-07 | 井関農機株式会社 | 作業車両 |
| JP2018093834A (ja) * | 2016-12-16 | 2018-06-21 | 三菱マヒンドラ農機株式会社 | 移植機 |
| CN112461899A (zh) * | 2020-11-04 | 2021-03-09 | 农芯科技(广州)有限责任公司 | 一种变量施肥系统及其控制方法 |
| CN113163713A (zh) * | 2019-03-07 | 2021-07-23 | 洋马动力科技有限公司 | 施肥图制作装置以及施肥图制作方法 |
| CN113661822A (zh) * | 2021-09-16 | 2021-11-19 | 上海联适导航技术股份有限公司 | 一种基于温度补偿的变量施肥方法及系统 |
| CN115004916A (zh) * | 2022-06-01 | 2022-09-06 | 上海联适导航技术股份有限公司 | 实时变量施肥设备、施肥方法及农业机械 |
| JP2023133751A (ja) * | 2022-03-14 | 2023-09-27 | 井関農機株式会社 | 農作業機 |
| JP2024108376A (ja) * | 2023-01-31 | 2024-08-13 | 井関農機株式会社 | 作業車両 |
| JP7704242B1 (ja) * | 2024-03-11 | 2025-07-08 | 井関農機株式会社 | 田植え機 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6888951B2 (ja) * | 2016-12-16 | 2021-06-18 | 三菱マヒンドラ農機株式会社 | 施肥作業機 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63254912A (ja) * | 1987-04-10 | 1988-10-21 | 井関農機株式会社 | 施肥装置付き水田用農作業機 |
| JPS63313510A (ja) * | 1987-06-15 | 1988-12-21 | Kubota Ltd | 施肥作業車 |
| JPH0491714A (ja) * | 1990-08-07 | 1992-03-25 | Yanmar Agricult Equip Co Ltd | 農作業機の土壌調整装置 |
| JPH0463646B2 (ja) * | 1986-05-10 | 1992-10-12 | Kubota Kk | |
| JPH0837808A (ja) * | 1994-08-03 | 1996-02-13 | Kubota Corp | 水田用作業機 |
| JPH09127033A (ja) * | 1995-10-26 | 1997-05-16 | Toho Keisoku Kenkyusho:Kk | 堆積物測定方法及びその装置 |
| JP2934994B2 (ja) * | 1991-10-24 | 1999-08-16 | 農林水産省農業研究センター所長 | 遠隔栽培制御システム |
| JPH11262310A (ja) * | 1998-03-17 | 1999-09-28 | Yanmar Agricult Equip Co Ltd | 精密農法 |
| JP2002245845A (ja) * | 2001-02-16 | 2002-08-30 | Kansai Electric Power Co Inc:The | 高導電性炭素複合体及びその製造方法 |
-
2008
- 2008-06-19 JP JP2008160200A patent/JP5704293B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0463646B2 (ja) * | 1986-05-10 | 1992-10-12 | Kubota Kk | |
| JPS63254912A (ja) * | 1987-04-10 | 1988-10-21 | 井関農機株式会社 | 施肥装置付き水田用農作業機 |
| JPS63313510A (ja) * | 1987-06-15 | 1988-12-21 | Kubota Ltd | 施肥作業車 |
| JPH0491714A (ja) * | 1990-08-07 | 1992-03-25 | Yanmar Agricult Equip Co Ltd | 農作業機の土壌調整装置 |
| JP2934994B2 (ja) * | 1991-10-24 | 1999-08-16 | 農林水産省農業研究センター所長 | 遠隔栽培制御システム |
| JPH0837808A (ja) * | 1994-08-03 | 1996-02-13 | Kubota Corp | 水田用作業機 |
| JPH09127033A (ja) * | 1995-10-26 | 1997-05-16 | Toho Keisoku Kenkyusho:Kk | 堆積物測定方法及びその装置 |
| JPH11262310A (ja) * | 1998-03-17 | 1999-09-28 | Yanmar Agricult Equip Co Ltd | 精密農法 |
| JP2002245845A (ja) * | 2001-02-16 | 2002-08-30 | Kansai Electric Power Co Inc:The | 高導電性炭素複合体及びその製造方法 |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012055212A (ja) * | 2010-09-08 | 2012-03-22 | Ishikawa Prefecture | 苗移植機 |
| JP2013146219A (ja) * | 2012-01-19 | 2013-08-01 | Ishikawa Prefecture | 施肥作業機 |
| JP2015159739A (ja) * | 2014-02-26 | 2015-09-07 | 井関農機株式会社 | 苗移植機 |
| JP2016086669A (ja) * | 2014-10-30 | 2016-05-23 | 井関農機株式会社 | 苗移植機 |
| CN104472088A (zh) * | 2014-11-13 | 2015-04-01 | 沈阳远大科技园有限公司 | 利用检测施肥溶液及土壤中ec值确定植物施肥量的方法 |
| JP2017153382A (ja) * | 2016-02-29 | 2017-09-07 | 井関農機株式会社 | 作業車両 |
| JP2018093834A (ja) * | 2016-12-16 | 2018-06-21 | 三菱マヒンドラ農機株式会社 | 移植機 |
| CN113163713A (zh) * | 2019-03-07 | 2021-07-23 | 洋马动力科技有限公司 | 施肥图制作装置以及施肥图制作方法 |
| KR20210135985A (ko) * | 2019-03-07 | 2021-11-16 | 얀마 파워 테크놀로지 가부시키가이샤 | 시비 맵 작성 장치 및 시비 맵 작성 방법 |
| KR102901188B1 (ko) * | 2019-03-07 | 2025-12-17 | 얀마 파워 테크놀로지 가부시키가이샤 | 시비 맵 작성 장치 및 시비 맵 작성 방법 |
| CN112461899A (zh) * | 2020-11-04 | 2021-03-09 | 农芯科技(广州)有限责任公司 | 一种变量施肥系统及其控制方法 |
| CN113661822A (zh) * | 2021-09-16 | 2021-11-19 | 上海联适导航技术股份有限公司 | 一种基于温度补偿的变量施肥方法及系统 |
| JP2023133751A (ja) * | 2022-03-14 | 2023-09-27 | 井関農機株式会社 | 農作業機 |
| JP7601035B2 (ja) | 2022-03-14 | 2024-12-17 | 井関農機株式会社 | 農作業機 |
| CN115004916A (zh) * | 2022-06-01 | 2022-09-06 | 上海联适导航技术股份有限公司 | 实时变量施肥设备、施肥方法及农业机械 |
| JP2024108376A (ja) * | 2023-01-31 | 2024-08-13 | 井関農機株式会社 | 作業車両 |
| JP7720034B2 (ja) | 2023-01-31 | 2025-08-07 | 井関農機株式会社 | 作業車両 |
| JP7704242B1 (ja) * | 2024-03-11 | 2025-07-08 | 井関農機株式会社 | 田植え機 |
| WO2025192094A1 (ja) * | 2024-03-11 | 2025-09-18 | 井関農機株式会社 | 田植え機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5704293B2 (ja) | 2015-04-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5704293B2 (ja) | 施肥装置 | |
| US12364187B2 (en) | Systems and methods for control, monitoring and mapping of agricultural applications | |
| EP3691436B1 (en) | Systems and apparatuses for soil and seed monitoring | |
| EP3586579B1 (en) | Method of mitigating compaction and a compaction mitigation system | |
| JP6704130B2 (ja) | 農作業支援システム | |
| US10390478B2 (en) | Application control and monitoring apparatus, systems, and methods | |
| US20210161059A1 (en) | Guidance working depth compensation | |
| JP6318805B2 (ja) | 圃場形状決定装置 | |
| JP2013146219A (ja) | 施肥作業機 | |
| US10820475B2 (en) | Agricultural implement and procedure for on-the-go soil nitrate testing | |
| JP7596489B2 (ja) | 作業関連情報管理装置および作業関連情報管理システム | |
| JP2014161307A (ja) | 作業マップ作成装置、および作業車両 | |
| JP2020201578A (ja) | 圃場管理システム | |
| Shearer et al. | Precision planting and crop thinning | |
| CN117178701A (zh) | 基于北斗的水稻直播机田间行驶辅助驾驶系统及方法 | |
| CN116616018A (zh) | 播种控制方法及播种机 | |
| JP7704242B1 (ja) | 田植え機 | |
| Semichev et al. | Automated attachment device for controlling position of agricultural implements in an aggregate | |
| EP3979780B1 (en) | Methods of operating tillage implements | |
| Amiama-Ares et al. | Manual GPS guidance system for agricultural vehicles | |
| US20210045284A1 (en) | Tillage implements, systems, and methods for working a field | |
| WO2024165931A1 (en) | Apparatus for mapping tire pressure of an agricultural implement through a field, and related control systems and methods | |
| Reddy | Agricultural Soil Compaction | |
| CN115152379A (zh) | 多功能测量的变量施肥系统 | |
| Jasa et al. | Field Efficiency Influences FROM Steering Adjustments USING Analysis OF Traffic Patterns |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20110121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20110121 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20110531 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120907 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5704293 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |