JP2009197768A - 可変作用角機構の異常判定装置 - Google Patents
可変作用角機構の異常判定装置 Download PDFInfo
- Publication number
- JP2009197768A JP2009197768A JP2008043516A JP2008043516A JP2009197768A JP 2009197768 A JP2009197768 A JP 2009197768A JP 2008043516 A JP2008043516 A JP 2008043516A JP 2008043516 A JP2008043516 A JP 2008043516A JP 2009197768 A JP2009197768 A JP 2009197768A
- Authority
- JP
- Japan
- Prior art keywords
- operating angle
- working angle
- normal range
- angle
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Abstract
【課題】本発明は、可変作用角機構の異常判定装置に関し、内燃機関の可変作用角機構の異常を高精度に検出することを目的とする。
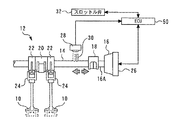
【解決手段】本発明の可変作用角機構の異常判定装置は、可変作用角機構12と、制御軸14と、この制御軸14を動かすためのアクチュエータとを有する。可変作用角機構12は、制御軸14を所定方向に動かした場合には内燃機関の気筒に設けられた吸気弁10の作用角を拡大させ、制御軸14を上記所定方向と逆の方向に動かした場合には吸気弁10の作用角を縮小させる。回転量センサ26は、上記アクチュエータの回転量を検出する。位置センサ28は、制御軸14の位置を検出する。ECU50は、回転量センサ26の出力と、位置センサ28の出力とに基づいて、可変作用角機構12の異常の有無を判定する。
【選択図】図1
【解決手段】本発明の可変作用角機構の異常判定装置は、可変作用角機構12と、制御軸14と、この制御軸14を動かすためのアクチュエータとを有する。可変作用角機構12は、制御軸14を所定方向に動かした場合には内燃機関の気筒に設けられた吸気弁10の作用角を拡大させ、制御軸14を上記所定方向と逆の方向に動かした場合には吸気弁10の作用角を縮小させる。回転量センサ26は、上記アクチュエータの回転量を検出する。位置センサ28は、制御軸14の位置を検出する。ECU50は、回転量センサ26の出力と、位置センサ28の出力とに基づいて、可変作用角機構12の異常の有無を判定する。
【選択図】図1
Description
本発明は、可変作用角機構の異常判定装置に関する。
内燃機関の吸気弁の作用角やリフト量を連続的に可変とする可変作用角機構が知られている。特開2007−170357号公報には、次のようなエンジン用動弁装置が開示されている。この動弁装置では、モータの回転動作をコントロールシャフトの直線方向の動作に変換し、コントロールシャフトの直線方向の動作に応じてバルブリフト量を可変させる。そして、この動弁装置では、回転センサにより検出されたモータの回転位置に基づいて、バルブリフト量を認識する。この動弁装置において、電源が瞬断した際に、回転センサにより検出された回転角度が消失し、現在のバルブリフト量を見失う場合がある。その場合、バルブリフト量とバルブタイミングとの関係が不適切となり、エンジンの失火またはノッキングが発生するおそれがある。この問題を解決するため、この動弁装置においては、コントロールシャフトの位置に応じてオン/オフする第1接点および第2接点を設けている(同公報の図3および図8参照)。それらの第1接点および第2接点は、バルブリフト量とバルブタイミングとの関係において失火領域およびノック領域の何れにも入らないような領域においてのみ第1接点および第2接点が共にオン状態となるように配置されている(同公報の段落0046)。そして、電源の瞬断のために、回転センサの検出回転角度が消失した場合には、第1接点および第2接点が共にオン状態となるような位置にコントロールシャフトを移動させることにより、失火およびノッキングを防止している(同公報の段落0050)。
コントロールシャフトを動かすモータの回転量をセンサで検出することによってバルブ作用角を認識する可変作用角機構においては、実際のバルブ作用角がECUの指令値に一致していないと、エミッション等が悪化する場合がある。近年のOBD(On-Board Diagnostic)規制においては、僅かなエミッション悪化を生じるに過ぎない異常であっても、車両がその異常を自動的に診断可能とすることが要求されている。このため、可変作用角機構においては、実際のバルブ作用角と制御指令値との間に差異(ずれ)が生ずる異常が発生した場合に、そのことを正確に診断することが求められている。
しかしながら、上述した従来のエンジン用動弁装置では、バルブ作用角が失火領域やノック領域に入っていないかどうかを確かめることができるのみであり、実際のバルブ作用角と制御指令値との間に差異が生じていないかどうかを精度良く診断することはできない。
本発明は、上記の点に鑑みてなされたものであり、内燃機関の可変作用角機構の異常を高精度に検出することのできる可変作用角機構の異常判定装置を提供することを目的とする。
第1の発明は、上記の目的を達成するため、可変作用角機構の異常判定装置であって、
制御軸と、該制御軸を動かすためのアクチュエータとを有し、前記制御軸を所定方向に動かした場合には内燃機関の気筒に設けられた弁の作用角を拡大させ、前記制御軸を前記所定方向と逆の方向に動かした場合には前記作用角を縮小させる可変作用角機構と、
前記アクチュエータの回転量を検出する回転量センサと、
前記制御軸の位置を検出する位置センサと、
前記回転量センサの出力と前記位置センサの出力とに基づいて、前記可変作用角機構の異常の有無を判定する異常判定手段と、
を備えることを特徴とする。
制御軸と、該制御軸を動かすためのアクチュエータとを有し、前記制御軸を所定方向に動かした場合には内燃機関の気筒に設けられた弁の作用角を拡大させ、前記制御軸を前記所定方向と逆の方向に動かした場合には前記作用角を縮小させる可変作用角機構と、
前記アクチュエータの回転量を検出する回転量センサと、
前記制御軸の位置を検出する位置センサと、
前記回転量センサの出力と前記位置センサの出力とに基づいて、前記可変作用角機構の異常の有無を判定する異常判定手段と、
を備えることを特徴とする。
また、第2の発明は、第1の発明において、
前記作用角の変化速度を検出する変化速度検出手段を備え、
前記異常判定手段は、前記変化速度が速い場合ほど、異常無しと判定する基準を緩和する判定基準緩和手段を含むことを特徴とする。
前記作用角の変化速度を検出する変化速度検出手段を備え、
前記異常判定手段は、前記変化速度が速い場合ほど、異常無しと判定する基準を緩和する判定基準緩和手段を含むことを特徴とする。
また、第3の発明は、第1または第2の発明において、
前記回転量センサは、前記作用角の変化に伴って連続的に変化する出力を発し、
前記位置センサは、前記制御軸が特定位置に来たときに出力を発し、
前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を前記回転量センサの出力に基づいて検出し、当該作用角と所定の基準作用角との偏差が正常範囲にあるか否かによって前記可変作用角機構の異常の有無を判定することを特徴とする。
前記回転量センサは、前記作用角の変化に伴って連続的に変化する出力を発し、
前記位置センサは、前記制御軸が特定位置に来たときに出力を発し、
前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を前記回転量センサの出力に基づいて検出し、当該作用角と所定の基準作用角との偏差が正常範囲にあるか否かによって前記可変作用角機構の異常の有無を判定することを特徴とする。
また、第4の発明は、第3の発明において、
前記偏差がプラスとなる方向の前記正常範囲の大きさと、前記偏差がマイナスとなる方向の前記正常範囲の大きさとを非対称とする正常範囲設定手段を備えることを特徴とする。
前記偏差がプラスとなる方向の前記正常範囲の大きさと、前記偏差がマイナスとなる方向の前記正常範囲の大きさとを非対称とする正常範囲設定手段を備えることを特徴とする。
また、第5の発明は、第4の発明において、
前記正常範囲設定手段は、前記偏差がプラスとなる方向の前記正常範囲の大きさと、前記偏差がマイナスとなる方向の前記正常範囲の大きさとの大小関係を、前記作用角の変化方向に応じて反転させることを特徴とする。
前記正常範囲設定手段は、前記偏差がプラスとなる方向の前記正常範囲の大きさと、前記偏差がマイナスとなる方向の前記正常範囲の大きさとの大小関係を、前記作用角の変化方向に応じて反転させることを特徴とする。
また、第6の発明は、第5の発明において、
前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を、前記回転量センサの出力がA−D変換される周期と同期した時間同期処理によって取得し、
前記正常範囲設定手段は、前記作用角が拡大する方向に変化している場合には、前記基準作用角を上回る側の前記正常範囲の大きさを、前記基準作用角を下回る側の前記正常範囲の大きさより大きくし、前記作用角が縮小する方向に変化している場合には、前記基準作用角を下回る側の前記正常範囲の大きさを、前記基準作用角を上回る側の前記正常範囲の大きさより大きくすることを特徴とする。
前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を、前記回転量センサの出力がA−D変換される周期と同期した時間同期処理によって取得し、
前記正常範囲設定手段は、前記作用角が拡大する方向に変化している場合には、前記基準作用角を上回る側の前記正常範囲の大きさを、前記基準作用角を下回る側の前記正常範囲の大きさより大きくし、前記作用角が縮小する方向に変化している場合には、前記基準作用角を下回る側の前記正常範囲の大きさを、前記基準作用角を上回る側の前記正常範囲の大きさより大きくすることを特徴とする。
また、第7の発明は、第5の発明において、
前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を割り込み処理によって取得し、
前記正常範囲設定手段は、前記作用角が拡大する方向に変化している場合には、前記基準作用角を下回る側の前記正常範囲の大きさを、前記基準作用角を上回る側の前記正常範囲の大きさより大きくし、前記作用角が縮小する方向に変化している場合には、前記基準作用角を上回る側の前記正常範囲の大きさを、前記基準作用角を下回る側の前記正常範囲の大きさより大きくすることを特徴とする。
前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を割り込み処理によって取得し、
前記正常範囲設定手段は、前記作用角が拡大する方向に変化している場合には、前記基準作用角を下回る側の前記正常範囲の大きさを、前記基準作用角を上回る側の前記正常範囲の大きさより大きくし、前記作用角が縮小する方向に変化している場合には、前記基準作用角を上回る側の前記正常範囲の大きさを、前記基準作用角を下回る側の前記正常範囲の大きさより大きくすることを特徴とする。
また、第8の発明は、第3乃至第7の発明の何れかにおいて、
前記基準作用角は、前記作用角が縮小する方向に変化している場合と、前記作用角が拡大する方向に変化している場合とで異なる値であることを特徴とする。
前記基準作用角は、前記作用角が縮小する方向に変化している場合と、前記作用角が拡大する方向に変化している場合とで異なる値であることを特徴とする。
第1の発明によれば、可変作用角機構の制御軸を動かすためのアクチュエータの回転量を検出する回転量センサの出力と、制御軸の位置を検出する位置センサの出力とに基づいて、可変作用角機構の異常の有無を高精度に判定することができる。すなわち、弁の実作用角が作用角指令値に追従しているかどうかを正確に検出することができる。よって、エミッションの悪化等を高精度に診断することができる。
第2の発明によれば、作用角の変化速度を検出し、作用角変化速度が速い場合ほど、異常無しと判定する基準を緩和することができる。作用角変化速度が速い場合ほど、回転量センサの出力を読み込む際のA−D変換誤差等が大きくなり易い傾向がある。このため、作用角変化速度にかかわらず異常判定基準を一定とすると、作用角変化速度が速い場合には、正常であるにもかかわらず異常であると誤判定するおそれがある。これに対し、第2の発明によれば、上記の傾向に合わせて、作用角が速い場合ほど異常判定基準を緩和することができる。このため、作用角変化速度にかかわらず、誤判定を確実に防止することができる。
第3の発明によれば、作用角の変化に伴って連続的な出力を発する回転量センサと、特定の制御軸位置で出力を発する位置センサとを用いて、可変作用角機構の異常の有無を高精度に判定することができる。また、特定の制御軸位置で出力を発する位置センサは安価であるので、製造コストを低減することができる。
第4の発明によれば、位置センサの出力発生タイミングにおいて回転量センサにより検出される作用角と、基準作用角との偏差がプラスとなる方向の正常範囲の大きさと、上記偏差がマイナスとなる方向の正常範囲の大きさとを非対称とすることができる。回転量センサの出力を読み込む際のA−D変換誤差は、プラス方向とマイナス方向との何れか一方向に発生する。このため、上記偏差の分布は、プラス方向とマイナス方向とで非対称となる傾向がある。第4の発明によれば、この傾向に対応して正常範囲を設定することができる。このため、可変作用角機構の異常の有無をより高い精度で判定することができる。
第5の発明によれば、上記偏差がプラスとなる方向の正常範囲の大きさと、上記偏差がマイナスとなる方向の正常範囲の大きさとの大小関係を、作用角の変化方向に応じて反転させることができる。回転量センサの出力を読み込む際のA−D変換誤差が発生する方向は、作用角の変化方向に応じて反転する性質がある。第4の発明によれば、この性質に対応して正常範囲を設定することができる。このため、可変作用角機構の異常の有無をより高い精度で判定することができる。
第6の発明によれば、位置センサの出力発生タイミングにおける作用角を時間同期処理によって取得する場合において、回転量センサの出力を読み込む際のA−D変換誤差の発生特性に合わせて、正常範囲を適切に設定することができる。このため、可変作用角機構の異常の有無をより高い精度で判定することができる。
第7の発明によれば、位置センサの出力発生タイミングにおける作用角を割り込み処理によって取得する場合において、回転量センサの出力を読み込む際のA−D変換誤差の発生特性に合わせて、正常範囲を適切に設定することができる。このため、可変作用角機構の異常の有無をより高い精度で判定することができる。
第8の発明によれば、作用角が縮小する方向に変化している場合と、作用角が拡大する方向に変化している場合とで、基準作用角を異なる値とすることができる。これにより、作用角の変化方向に応じて出力にヒステリシスが生ずる位置センサを用いた場合であっても、異常判定を適切に行うことができる。
以下、図面を参照してこの発明の実施の形態について説明する。なお、各図において共通する要素には、同一の符号を付して、重複する説明を省略する。
実施の形態1.
[システム構成の説明]
図1は、本発明の実施の形態1のシステム構成を説明するための図である。図1に示すように、本実施形態のシステムは、図示しない内燃機関(以下、「エンジン」と言う)の吸気弁10の作用角(以下、単に「作用角」とも言う)を連続的に可変とする可変作用角機構12を備えている。
[システム構成の説明]
図1は、本発明の実施の形態1のシステム構成を説明するための図である。図1に示すように、本実施形態のシステムは、図示しない内燃機関(以下、「エンジン」と言う)の吸気弁10の作用角(以下、単に「作用角」とも言う)を連続的に可変とする可変作用角機構12を備えている。
可変作用角機構12は、制御軸14と、この制御軸14を軸方向に直進移動させる制御軸駆動装置16とを有している。制御軸駆動装置16には、アクチュエータとしてのモータと、このモータの回転運動を直進運動に変換する運動変換機構(例えば螺旋カム等)とが内蔵されている。制御軸14と、制御軸駆動装置16の出力軸16Aとは、締結部材18を介して連結されている。
制御軸14の途中には、ローラーアーム20と、このローラーアーム20を挟んで両側に位置する一対の揺動カム22とが設けられている。ローラーアーム20のローラーには、図示しない吸気カム軸のカムが当接している。その吸気カム軸が回転すると、ローラーアーム20が揺動する。揺動カム22は、ローラーアーム20と共に揺動する。揺動カム22と吸気弁10との間には、ロッカーアーム24が配置されている。揺動カム22は、ロッカーアーム24に設けられたローラーに当接している。揺動カム22が揺動すると、ロッカーアーム24が揺動して、ロッカーアーム24が吸気弁10を押圧することにより、吸気弁10がリフト(開弁)する。
ローラーアーム20および揺動カム22の内周部には、互いに逆方向の螺旋状をなすヘリカルスプラインが形成されている。また、ローラーアーム20および揺動カム22の内側には、上記ヘリカルスプラインと噛み合うスライダギヤ(図示せず)が設置されている。このスライダギヤは、制御軸14と共に軸方向に移動する。制御軸14を軸方向に移動させると、上記ヘリカルスプラインとスライダギヤとの作用により、ローラーアーム20と揺動カム22との相対角度が変化する。その結果、吸気カム軸の回転に伴う揺動カム22の揺動範囲が変化することにより、吸気弁10のリフト量および作用角が変化する。
このようにして、可変作用角機構12では、制御軸駆動装置16によって制御軸14を一方向(例えば図1中の左方向)に移動させることにより吸気弁10の作用角を連続的に縮小させることができ、制御軸14をそれとは逆の方向(例えば図1中の右方向)に移動させることにより吸気弁10の作用角を連続的に拡大させることができる。なお、このような可変作用角機構12の詳細な構造は、例えば特開2001−263015号公報に記載されており、公知であるので、本明細書ではこれ以上の説明を省略する。
制御軸駆動装置16の近傍には、制御軸駆動装置16のモータの回転量を検出する回転量センサ26が設置されている。また、制御軸14の近傍には、制御軸14の位置を検出する位置センサ28が設置されている。本実施形態の位置センサ28は、制御軸14に設けられたターゲット30の位置を非接触で検出するように構成されている。制御軸駆動装置16のモータと、回転量センサ26と、位置センサ28とは、それぞれ、ECU(Electronic Control Unit)50に電気的に接続されている。また、ECU50には、エンジンの吸気通路に設置されたスロットル弁32が電気的に接続されている。
図2は、吸気弁10の実作用角と、回転量センサ26の出力値との関係を示す図である。回転量センサ26は、制御軸駆動装置16のモータの回転量に比例した連続的な(リニアな)出力を発する。吸気弁10の実作用角の変化は、制御軸駆動装置16のモータの回転量に比例する。よって、図2に示すように、回転量センサ26の出力値は、吸気弁10の実作用角の変化に伴って、連続的に(リニアに)変化する。すなわち、回転量センサ26の出力値(電圧値)と、吸気弁10の作用角の値とは、1対1に対応する。以下の説明において、回転量センサ26の出力値とは、吸気弁10の実作用角を表すものとする。
可変作用角機構12を備えたエンジンでは、吸気弁10の作用角を変化させることにより、スロットル弁32によらずに、吸入空気量を制御することができる。この場合、ECU50は、吸入空気量を制御するため、エンジンの運転状態に応じて、吸気弁10の目標作用角を設定する。そして、ECU50は、回転量センサ26の出力に基づいて吸気弁10の実作用角を把握し、その実作用角が目標作用角に一致するように、制御軸駆動装置16を制御する。
図3は、吸気弁10の実作用角と、位置センサ28の出力値との関係を示す図である。位置センサ28は、ターゲット30の位置、すなわち制御軸14の位置に応じて、間欠的に複数(本実施形態では三つ)のエッジ出力を発生する。よって、図3に示すように、位置センサ28は、吸気弁10の実作用角の変化に伴って、三つのエッジ出力を発生する。
位置センサ28は、制御軸14と共に移動するターゲット30が特定の位置に来たときにエッジ出力を発する。よって、位置センサ28がエッジ出力を発するときの吸気弁10の作用角は決まっている。そこで、本実施形態では、回転量センサ26の出力と、位置センサ28の出力との相対関係に基づいて、制御軸14がECU50の指令値通りに動いているか否かを判定することとした。すなわち、可変作用角機構12が正常であるときに位置センサ28からエッジ出力が発せられるべき制御軸14の位置における作用角の値(以下、「基準作用角」と称する)を予めECU50に記憶しておく。そして、エッジ出力が発生したときの作用角を回転量センサ26から読み込み、予め記憶された基準作用角と比較する。その両者の偏差が、所定の許容幅(この許容幅は、センサ計測誤差やソフトウェア処理誤差等に起因する検出誤差を考慮して、予め設定される)以下である場合には、制御軸14はECU50の指令値通りに正常に動いていると判断することができる。よって、この場合には、可変作用角機構12は正常であると判定することができる。これに対し、上記偏差が上記許容幅より大きい場合には、制御軸14の実際の位置と、ECU50の指令値との間に差異(ずれ)が生じていると判断できる。よって、この場合には、可変作用角機構12に異常が生じていると判定することができる。
ところで、回転量センサ出力は、所定のサンプリング周期毎にA−D変換されて、ECU50に読み込まれる。このため、位置センサ28からエッジ出力が発せられたときの回転量センサ値(作用角)であるとしてECU50において扱われる値は、厳密には、エッジ出力が発せられた瞬間の回転量センサ出力には一致しない。両者の間には、最大で、A−D変換周期(サンプリング周期)の分だけのタイミングのずれがある。このため、位置センサ28からエッジ出力が発せられたときの回転量センサ値として検出された値には、最大で、A−D変換周期の期間における回転量センサ値の変化量に相当する誤差が生じ得る。この誤差を以下「A−D変換誤差」と称する。
また、エッジ出力が発せられたときの回転量センサ値を読み込む際のソフトウェア処理には、時間同期処理と、割り込み処理(エッジ発生割り込み処理)との2種類がある。時間同期処理の場合には、エッジ出力が発生すると、次の(直後の)A−D変換タイミングにおいて、回転量センサ値が読み込まれる。これに対し、割り込み処理の場合には、エッジ出力が発生したタイミングで、回転量センサ値が読み込まれる。そして、何れの処理であるかによって、A−D変換誤差の発生の仕方が異なる。
図4は、時間同期処理の場合におけるA−D変換誤差の発生の仕方を表す図である。この図は、回転量センサ26の出力値が上昇中であるとき(作用角拡大方向に変化しているとき)にエッジ出力が発生した場合を示している。同図中、「AD」と記されているのがA−D変換タイミングである。図4中、エッジ出力が発生したタイミングにおける実際の回転量センサ値は、×印で示される。しかしながら、時間同期処理の場合には、エッジ出力が発生した直後のA−D変換タイミングで回転量センサ値が読み込まれる。このため、読み込まれる回転量センサ値は、図4中の○印で示す値となる。従って、図4の場合、ECU50において、エッジ出力が発生したときの回転量センサ値は、実際よりも大きな値として認識される。つまり、A−D変換誤差がプラス方向に発生する。
これに対し、図5は、割り込み処理の場合におけるA−D変換誤差の発生の仕方を表す図である。図5では、図4と同様に、回転量センサ26の出力値が上昇中であるときにエッジ出力が発生した場合を示している。割り込み処理の場合には、エッジ出力が発生すると、すぐに回転量センサ値が読み込まれる。このため、この場合には、エッジ出力発生の直前のA−D変換タイミングにおける回転量センサ値(図5中の○印)が読み込まれることとなる。従って、図5の場合、ECU50において、エッジ出力が発生したときの回転量センサ値は、実際よりも小さな値として認識される。つまり、A−D変換誤差がマイナス方向に発生する。
一方、回転量センサ26の出力値が下降中であるとき(作用角縮小方向に変化しているとき)にエッジ出力が発生した場合には、上記とは逆に、時間同期処理ではマイナス方向のA−D変換誤差が、割り込み処理ではプラス方向のA−D変換誤差が、それぞれ発生する。
また、図4および図5に示すように、A−D変換誤差の大きさは、回転量センサ値の変化の傾きに比例して大きくなる。このため、A−D変換誤差は、作用角の変化速度が速い場合ほど、大きくなる。
更に、エッジ出力発生タイミングにおける作用角として読み込まれる値には、上記A−D変換誤差のほかに、センサ計測誤差等も含まれる。センサ計測誤差等は、プラス方向とマイナス方向とで均等に分布する。
以上のことから、エッジ出力が発生したときの作用角として読み込まれる値に含まれる検出誤差の分布は、次のようになる。図6は、時間同期処理の場合であって、作用角が拡大方向に変化しているときにエッジ出力が発生した場合の検出誤差の分布を示す図である。この場合、検出誤差としては、プラス方向とマイナス方向とに均等に発生する誤差(センサ計測誤差等)に加えて、プラス方向にのみA−D変換誤差が発生する。このため、検出誤差は、図6に示すように、マイナス方向よりもプラス方向に大きく分布する。また、前述した理由により、作用角変化速度が速い場合ほど、検出誤差は大きくなる。
一方、図7は、時間同期処理の場合であって、作用角が縮小方向に変化しているときにエッジ出力が発生した場合の検出誤差の分布を示す図である。この場合、検出誤差としては、プラス方向とマイナス方向とに均等に発生する誤差に加えて、マイナス方向にのみA−D変換誤差が発生する。このため、検出誤差は、図6の場合とは逆に、プラス方向よりもマイナス方向に大きく分布する。この場合も、前述した理由により、作用角変化速度が速い場合ほど、検出誤差は大きくなる。
割り込み処理の場合の検出誤差の分布については、図示を省略するが、次のようになる。前述したように、割り込み処理の場合には、A−D変換誤差の発生する方向が時間同期処理の場合と逆になる。このため、割り込み処理の場合の検出誤差の分布は、作用角拡大方向に変化しているときにエッジ出力が発生した場合においては上述した図7と同様になり、作用角縮小方向に変化しているときにエッジ出力が発生した場合においては上述した図6と同様になる。
以上説明したように、エッジ出力発生タイミングにおける作用角として読み込まれる値に含まれる検出誤差の分布には、時間同期処理、割り込み処理の何れの場合においても、次のような傾向がある。
(1)検出誤差の発生し易さがプラス方向とマイナス方向とで非対称であり、且つ、作用角の変化方向に応じて、それらの大小関係が反転する。
(2)作用角変化速度が速い場合ほど、検出誤差が大きくなり易い。
(1)検出誤差の発生し易さがプラス方向とマイナス方向とで非対称であり、且つ、作用角の変化方向に応じて、それらの大小関係が反転する。
(2)作用角変化速度が速い場合ほど、検出誤差が大きくなり易い。
前述したように、本実施形態では、エッジ出力発生タイミングにおける作用角を読み込み、その作用角と、予め記憶された基準作用角との偏差が所定の許容幅以下であるかどうかによって、可変作用角機構12の異常を判定する。この場合に、上記偏差は、上記(1)の影響により、プラス方向およびマイナス方向の何れか一方向に大きくなり易い傾向があり、且つ、作用角の変化方向に応じてその方向が反転する。また、上記偏差は、上記(2)の影響により、作用角変化速度が速い場合ほど、大きくなり易い傾向がある。
従って、上記の許容幅を、作用角の変化方向や変化速度等によらずに常に一定の値にすると、適切な異常判定を行うことは困難である。そこで、本実施形態では、上記の事情に鑑みて、許容幅を次の二つの条件を満足するように設定することとした。
(i)エッジ出力発生タイミングにおける作用角と、基準作用角との偏差がプラスであるかマイナスであるかに応じて許容幅を非対称とし、且つ、作用角変化方向に応じて、プラス方向の許容幅とマイナス方向の許容幅との大小関係を反転させる。
(ii)作用角変化速度が速い場合ほど、許容幅を大きくする。
(i)エッジ出力発生タイミングにおける作用角と、基準作用角との偏差がプラスであるかマイナスであるかに応じて許容幅を非対称とし、且つ、作用角変化方向に応じて、プラス方向の許容幅とマイナス方向の許容幅との大小関係を反転させる。
(ii)作用角変化速度が速い場合ほど、許容幅を大きくする。
本実施形態によれば、許容幅を上記のように設定することにより、上記偏差の正負や、作用角の変化方向および変化速度などに応じて、許容幅を適切な値に設定することができる。このため、可変作用角機構12の異常を高精度に判定することができる。
なお、基準作用角の値は、各構成部品の設計値に基づいて算出することが可能である。よって、それらの設計値から基準作用角を算出し、その値を予めECU50に記憶しておけばよい。
ただし、可変作用角機構12の部品や位置センサ28が取り付けられる部品(例えばシリンダヘッドカバー)の設計公差、各部品の組み付け公差、あるいは位置センサ28内の各センサ素子の取り付け公差などによるばらつきを吸収して、より高精度な異常判定を行うためには、可変作用角機構12が正常な状態のときに学習を行うことによって基準作用角の値を決定することが望ましい。
そこで、本実施形態では、可変作用角機構12が正常な状態のときに実際に制御軸14を動かして作用角を変化させた上で、位置センサ28からのエッジ出力を検出することにより、基準作用角を学習することとした。そして、その基準作用角の学習値(以下、単に「学習値」という場合もある)を用いて、異常判定を行うこととした。これにより、上述したような各種の公差に起因する、個体によるばらつきを吸収することができるので、より高精度な異常判定を行うことができる。
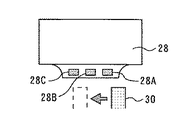
以下、図8および図9を参照して、位置センサ28について更に詳しく説明する。図8は、位置センサ28を拡大して示す図である。位置センサ28には、例えばホール素子などの三つのセンサ素子28A,28B,28Cが内蔵されている。図9は、ターゲット30が図8中の矢印のように移動した場合の、位置センサ28の出力を詳細に示す図である。図9中の上段は、センサ素子28Cを基準とするセンサ素子28Aおよび28Bの出力波形を示す。これらの出力波形に対し、所定の信号処理を施すことにより、図9中の下段に示すように、三つのエッジ出力が得られる。
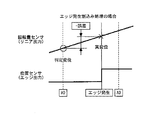
このような位置センサ28は、ターゲット30の移動方向によって、出力にヒステリシスが生ずるという特性を有している。すなわち、ターゲット30(制御軸14)が図中の右から左へ移動する場合と、左から右へ移動する場合とで、各エッジ出力の発せられる位置が異なる。図10は、制御軸14を両方向に移動させた場合の、回転量センサ26の出力と、位置センサ28の出力との経時変化を示す図である。
図10中の実線で示す位置センサ出力は、回転量センサ値が減少する方向に変化する場合、つまり作用角縮小方向に制御軸14が移動する場合のものである。この場合には、回転量センサ値が図10中の○で示す値であるときに、エッジ出力が発せられる。
これに対し、図10中の破線で示す位置センサ出力は、回転量センサ値が増大する方向に変化する場合、つまり作用角拡大方向に制御軸14が移動する場合のものである。この場合には、回転量センサ値が図10中の×で示す値であるときに、エッジ出力が発せられる。
このように、作用角が縮小する方向に変化している場合と、作用角が拡大する方向に変化している場合とでは、位置センサ28からエッジ出力が発せられるときの回転量センサ値(作用角)が異なる。このため、作用角縮小方向と作用角拡大方向とで別々の基準作用角を用意する必要がある。そこで、本実施形態では、作用角の変化方向毎に学習を行い、基準作用角の学習値を取得することとした。
[実施の形態1における具体的処理]
図11は、本実施形態において、基準作用角の学習値を取得する際にECU50が実行するルーチンのフローチャートである。本ルーチンは、時間同期処理の場合と、割り込み処理の場合とに共通である。
図11は、本実施形態において、基準作用角の学習値を取得する際にECU50が実行するルーチンのフローチャートである。本ルーチンは、時間同期処理の場合と、割り込み処理の場合とに共通である。
図11に示すルーチンによれば、まず、位置センサ28からエッジ出力が発せられたか否かが判別される(ステップ100)。エッジ出力が発せられたと判別された場合には、位置センサ28が発する三つのエッジ出力のうち、今回発生したエッジ出力についての学習が完了しているか否かが判別される(ステップ102)。
上記ステップ102で、今回発生したエッジ出力についての学習が未完了であった場合には、次に、回転量センサ26の出力値が読み込まれる(ステップ104)。続いて、作用角が縮小する方向(以下、「閉じ側」とも言う)へ変化している途中であるか否かが判別される(ステップ106)。
ECU50では、作用角が縮小する方向へ制御軸駆動装置16が駆動されている場合には、閉じ側フラグがオンとされる。よって、上記ステップ106で、閉じ側フラグがオンである場合には、作用角が縮小する方向へ変化中であると判別される。この場合には、上記ステップ104で読み込まれた回転量センサ値が、閉じ側の学習値として記憶される(ステップ108)。その後、当該エッジ出力について、作用角が縮小する方向の学習が完了した旨が記憶される(ステップ110)。
一方、上記ステップ106で、閉じ側フラグがオフである場合には、作用角が拡大する方向(以下、「開き側」とも言う)へ変化中であると判別される。この場合には、上記ステップ104で読み込まれた回転量センサ値が、開き側の学習値として記憶される(ステップ112)。その後、当該エッジ出力について作用角が拡大する方向の学習が完了した旨が記憶される(ステップ114)。
本実施形態では、上述した図11に示すルーチンが、位置センサ28の各エッジ出力に対して繰り返し実行されることにより、各エッジ出力毎の学習値を取得することができる。なお、上述した図11のルーチンによって学習を行う際には、学習値の誤差をできるだけ小さくするため、作用角の変化速度を、通常時よりも遅くすることが好ましい。しかしながら、前述したように、本システムでは、通常、吸気弁10の作用角を変化させることによって吸入空気量を制御している。このため、作用角変化速度を遅くすると、エンジントルクの変化速度が遅くなるので、運転者の要求するトルクを迅速に発生させることが困難となる。そこで、学習のために作用角変化速度を通常時より遅くする場合には、スロットル弁32の開度によって吸入空気量を制御するスロットル制御に切り替えることが好ましい。
なお、上述したような基本作用角の学習値を取得する処理は、可変作用角機構12が正常な状態のときに実行される。例えば新車完成時や整備工場での整備完了時であれば、可変作用角機構12が正常な状態であると保証することができる。従って、そのような場合において、学習を実行することが望ましい。
図12は、本実施形態において、基準作用角からのずれの許容幅を算出するためにECU50が実行するルーチンのフローチャートである。本ルーチンは、回転量センサ26の出力がA−D変換されてECU50に入力されるのに同期して、繰り返し実行される。本ルーチンは、時間同期処理の場合と、割り込み処理の場合とに共通である。
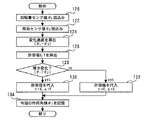
図12に示すルーチンによれば、まず、回転量センサ26の出力に基づいて、現在の作用角θ1が読み込まれる(ステップ120)。次いで、前回の作用角θ2が読み込まれる(ステップ122)。そして、現在の作用角θ1から前回の作用角θ2を減算することにより、作用角変化速度(θ1−θ2)が算出される(ステップ124)。
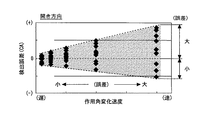
続いて、上記ステップ124で算出された作用角変化速度(θ1−θ2)に基づいて、許容幅XおよびYが算出される(ステップ126)。図13は、許容幅XおよびYと、作用角変化速度との関係を示すマップである。図13に示すように、許容幅Xは、前述した非対称の許容幅のうち、大きい方の値に相当し、許容幅Yは、小さい方の値に相当する。そして、これらの許容幅XおよびYは、作用角変化速度が速い場合ほど(つまり、上記ステップ124で算出された作用角変化速度(θ1−θ2)の絶対値が大きい場合ほど)、大きくなるように規定されている。上記ステップ126においては、このような図13に示すマップに基づいて、許容幅XおよびYが算出される。
次いで、作用角が拡大方向に変化中であるか否かが判別される(ステップ128)。このステップ128において、現在の作用角θ1が前回の作用角θ2より大きい場合には、作用角が拡大方向に変化中であると判断できる。この場合には、許容幅γに許容幅Xが代入され、許容幅κに許容幅Yが代入される(ステップ130)。すなわち、この場合には、γ>κとなる。
これに対し、ステップ128において、現在の作用角θ1が前回の作用角θ2より小さい場合には、作用角が縮小方向に変化中であると判断できる。この場合には、許容幅γに許容幅Yが代入され、許容幅κに許容幅Xが代入される(ステップ132)。すなわち、この場合には、γ<κとなる。
上記ステップ130または132の処理に続いて、上記ステップ120で読み込まれた今回の作用角値θ1が記憶される(ステップ134)。
次に、本実施形態において可変作用角機構12の異常を判定する際の具体的処理について説明するが、まず、時間同期処理の場合について説明する。
図14は、時間同期処理の場合において、可変作用角機構12の異常を判定する際にECU50が実行するルーチンのフローチャートである。本ルーチンは、回転量センサ26の出力がA−D変換されてECU50に入力されるのに同期して、繰り返し実行される。
図14に示すルーチンによれば、まず、位置センサ28からエッジ出力が発生したか否かが判別される(ステップ140)。このステップ140において、エッジ出力が発生していない場合には、本ルーチンの実行がそのまま終了される。
上記ステップ140において、エッジ出力が発生したと判別された場合には、次に、今回発生したそのエッジ出力についての基準作用角の学習が完了しているか否かが判別される(ステップ142)。このステップ142で、学習が完了していると判別された場合には、次に、前述した図12に示すルーチンのステップ134で記憶された現在の作用角θ1が、今回のエッジ出力発生タイミングにおける作用角として読み込まれる(ステップ144)。
一方、上記ステップ142において、今回発生したエッジ出力についての学習が未完了であると判別された場合には、異常判定を行うことができないので、本ルーチンの実行がそのまま終了される。
上記ステップ144の処理に続いて、今回発生したエッジ出力についての基準作用角の学習値θ3が読み込まれる(ステップ146)。なお、このステップ146では、上記ステップ128で作用角が拡大方向に変化中であると判断されている場合には開き側の学習値として記憶されている値が読み込まれ、上記ステップ128で作用角が縮小方向に変化中であると判断されている場合には閉じ側の学習値として記憶されている値が読み込まれる。
上記ステップ146の処理に続いて、許容幅γおよびκの値が読み込まれる(ステップ148)。次いで、判定値αおよびβが算出される(ステップ150)。このステップ150において、判定値αは、正常範囲の上限値であり、上記学習値θ3に上記許容幅γを加算した値(θ3+γ)として算出される。判定値βは、正常範囲の下限値であり、上記学習値θ3から許容幅κを減算した値(θ3−κ)として算出される。
続いて、上記ステップ144で読み込まれたエッジ出力発生タイミングにおける作用角θ1が、上記判定値αおよびβで規定される正常範囲内にあるか否かが判別される(ステップ152)。すなわち、次式が成り立つか否かが判別される。
β<θ1<α ・・・(1)
β<θ1<α ・・・(1)
上記ステップ152で、上記(1)式が成り立つと判別された場合には、吸気弁10の実作用角と、ECU50の指令値(制御目標値)との間に、有意なずれはないと判断できる。そこで、この場合には、可変作用角機構12は正常であると判定される(ステップ154)。これに対し、上記(1)式が成り立たないと判別された場合には、吸気弁10の実作用角と、ECU50の指令値との間に有意なずれが生じていると判断できる。そこで、この場合には、可変作用角機構12に異常が発生していると判定される(ステップ156)。
以上説明した時間同期処理の場合の異常判定ルーチンにおいては、上記ステップ150の処理に示されるように、許容幅γがプラス方向(基準作用角θ3を上回る方向)の許容幅とされ、許容幅κがマイナス方向(基準作用角θ3を下回る方向)の許容幅とされる。
作用角が拡大方向に変化中である場合には、上記ステップ130で述べたように、γ>κと設定される。すなわち、この場合には、プラス方向の許容幅γがマイナス方向の許容幅κより大きく設定される。前述した図6に示すように、時間同期処理の場合であって作用角が拡大方向(開き方向)に変化しているときの検出誤差は、マイナス方向よりもプラス方向に大きく分布する傾向がある。従って、上述した許容幅の設定は、この傾向に適合している。
一方、作用角が縮小方向に変化中である場合には、上記ステップ132で述べたように、γ<κと設定される。すなわち、この場合には、マイナス方向の許容幅κがプラス方向の許容幅γより大きく設定される。前述した図7に示すように、時間同期処理の場合であって作用角が縮小方向(閉じ方向)に変化しているときの検出誤差は、プラス方向よりもマイナス方向に大きく分布する傾向がある。従って、上述した許容幅の設定は、この傾向に適合している。
このように、時間同期処理の場合においては、図12および図14のルーチンを実行することにより、作用角の変化方向が拡大方向と縮小方向との何れの方向である場合であっても、検出誤差の分布傾向に適合するように、正常範囲を適切に設定することができる。このため、可変作用角機構12の異常判定を高精度に行うことができる。
また、図12および図14のルーチンの処理によれば、作用角変化速度が速い場合ほど、許容幅γおよびκを拡大することができる(図13参照)。このことは、作用角変化速度が速い場合ほど検出誤差が大きくなり易いという、前述した傾向と適合している。このように、本実施形態によれば、作用角変化速度に応じて正常範囲を適切に設定することができる。従って、可変作用角機構12の異常判定を高精度に行うことができる。
更に、図12および図14のルーチンの処理によれば、エッジ出力が発生したときの作用角の変化方向を判別し、その変化方向毎に記憶された基準作用角学習値と比較することによって、可変作用角機構12の異常判定を行うことができる。よって、作用角の変化方向(制御軸14の移動方向)によって出力にヒステリシスが生ずるような位置センサ28を用いた場合であっても、異常判定を適切に実行することができる。
次に、割り込み処理の場合について説明する。図15は、割り込み処理の場合において、可変作用角機構12の異常を判定する際にECU50が実行するルーチンのフローチャートである。本ルーチンは、位置センサ28からのエッジ出力が発生した場合に、割り込み処理によって実行される。
図15に示すルーチンによれば、まず、今回発生したエッジ出力についての基準作用角の学習が完了しているか否かが判別される(ステップ160)。このステップ160で、今回発生したエッジ出力についての学習が完了していると判別された場合には、次に、前述した図12に示すルーチンのステップ134で記憶された現在の作用角θ1が、今回のエッジ出力発生タイミングにおける作用角として読み込まれる(ステップ162)。
一方、上記ステップ160において、今回発生したエッジ出力についての学習が未完了であると判別された場合には、異常判定を行うことができないので、本ルーチンの実行がそのまま終了される。
上記ステップ162の処理に続いて、今回発生したエッジ出力についての基準作用角の学習値θ3が読み込まれる(ステップ164)。なお、このステップ164では、上記ステップ128で作用角が拡大方向に変化中であると判断されている場合には開き側の学習値として記憶されている値が読み込まれ、上記ステップ128で作用角が縮小方向に変化中であると判断されている場合には閉じ側の学習値として記憶されている値が読み込まれる。
上記ステップ164の処理に続いて、許容幅γおよびκの値が読み込まれる(ステップ166)。次いで、判定値αおよびβが算出される(ステップ168)。このステップ168において、判定値αは、正常範囲の上限値であり、上記学習値θ3に上記許容幅κを加算した値(θ3+κ)として算出される。判定値βは、正常範囲の下限値であり、上記学習値θ3から許容幅γを減算した値(θ3−γ)として算出される。
続いて、上記ステップ162で読み込まれたエッジ出力発生タイミングにおける作用角θ1が、上記判定値αおよびβで規定される正常範囲内にあるか否かが判別される(ステップ170)。すなわち、次式が成り立つか否かが判別される。
β<θ1<α ・・・(2)
β<θ1<α ・・・(2)
上記ステップ170で、上記(2)式が成り立つと判別された場合には、吸気弁10の実作用角と、ECU50の指令値(制御目標値)との間に、有意なずれはないと判断できる。そこで、この場合には、可変作用角機構12は正常であると判定される(ステップ172)。これに対し、上記(2)式が成り立たないと判別された場合には、吸気弁10の実作用角と、ECU50の指令値との間に有意なずれが生じていると判断できる。そこで、この場合には、可変作用角機構12に異常が発生していると判定される(ステップ174)。
以上説明した割り込み処理の場合の異常判定ルーチンにおいては、上記ステップ168の処理に示されるように、許容幅κがプラス方向(基準作用角θ3を上回る方向)の許容幅とされ、許容幅γがマイナス方向(基準作用角θ3を下回る方向)の許容幅とされる。
作用角が拡大方向に変化中である場合には、上記ステップ130で述べたように、γ>κと設定される。すなわち、この場合には、マイナス方向の許容幅γがプラス方向の許容幅κより大きく設定される。前述したように、割り込み処理の場合であって作用角が拡大方向(開き方向)に変化しているときの検出誤差は、プラス方向よりもマイナス方向に大きく分布する傾向がある。従って、上述した許容幅の設定は、この傾向と適合している。
一方、作用角が縮小方向に変化中である場合には、上記ステップ132で述べたように、γ<κと設定される。すなわち、この場合には、プラス方向の許容幅κがマイナス方向の許容幅γより大きく設定される。前述したように、割り込み処理の場合であって作用角が縮小方向(閉じ方向)に変化しているときの検出誤差は、マイナス方向よりもプラス方向に大きく分布する傾向がある。従って、上述した許容幅の設定は、この傾向と適合している。
このように、割り込み処理の場合においては、図12および図15のルーチンを実行することにより、作用角の変化方向が拡大方向と縮小方向との何れの方向である場合であっても、検出誤差の分布傾向に適合するように、正常範囲を適切に設定することができる。このため、可変作用角機構12の異常判定を高精度に行うことができる。
以上説明した実施の形態1においては、制御軸14がその軸方向に直進移動するものとして説明したが、本発明は、制御軸14が回転し、その回転位置に応じて吸気弁10の作用角を変化させるように構成されている可変作用角機構にも適用可能である。
また、本実施の形態1においては、許容幅γおよびκが前記第4の発明における「正常範囲の大きさ」に相当している。ECU50が、図12のルーチン並びに図14または図15のルーチンの処理を実行することにより前記第1の発明における「異常判定手段」が、上記ステップ120〜124の処理を実行することにより前記第2の発明における「変化速度検出手段」が、上記ステップ126の処理を実行することにより前記第2の発明における「判定基準緩和手段」が、上記ステップ150の処理を実行することにより前記第4、第5および第6の発明における「正常範囲設定手段」が、上記ステップ168の処理を実行することにより前記第4、第5および第7の発明における「正常範囲設定手段」が、それぞれ実現されている。
実施の形態2.
次に、図16を参照して、本発明の実施の形態2について説明するが、上述した実施の形態1との相違点を中心に説明し、同様の事項については、その説明を簡略化または省略する。本実施形態のハードウェア構成は、前述した図1の構成と同様である。本実施形態は、ECU50に、前述した図11に示すルーチンと、後述する図16に示すルーチンとを実行させることにより、実現することができる。
次に、図16を参照して、本発明の実施の形態2について説明するが、上述した実施の形態1との相違点を中心に説明し、同様の事項については、その説明を簡略化または省略する。本実施形態のハードウェア構成は、前述した図1の構成と同様である。本実施形態は、ECU50に、前述した図11に示すルーチンと、後述する図16に示すルーチンとを実行させることにより、実現することができる。
前述した実施の形態1では、作用角変化速度を検出し、その作用角変化速度が速くなるほど、正常範囲の許容幅が大きくなるように制御している。このため、作用角変化速度が様々に変化するようなシステムに好適に対応可能である。
これに対し、本実施形態のシステムでは、作用角が拡大方向(開き側)に変化する場合と、作用角が縮小方向(閉じ側)に変化する場合とで、作用角変化速度がそれぞれ一定の所定速度となるように制御される。この場合、作用角拡大方向の変化速度を、作用角縮小方向の変化速度より速くすることが望ましい。一般に、作用角拡大方向については、加速性を向上させるために作用角変化速度を速くすることが好ましく、作用角縮小方向については、減速ショックを緩和するために作用角変化速度を遅くすることが好ましいからである。
上述したように、本実施形態のシステムでは、作用角変化速度は、高速(作用角拡大方向)と低速(作用角縮小方向)との2種類だけである。このため、本実施形態では、図13に示すようなマップを用いる必要はないので、上記2種類の作用角変化速度に対応する許容幅(定数A,B,CおよびD)のみを予めECU50に記憶しておくこととした。
[実施の形態2における具体的処理]
以下、本実施形態における具体的処理を時間同期処理の場合について説明する。図16は、時間同期処理の場合において、可変作用角機構12の異常を判定する際にECU50が実行するルーチンのフローチャートである。本ルーチンは、回転量センサ26の出力がA−D変換されてECU50に入力されるのに同期して、繰り返し実行される。
以下、本実施形態における具体的処理を時間同期処理の場合について説明する。図16は、時間同期処理の場合において、可変作用角機構12の異常を判定する際にECU50が実行するルーチンのフローチャートである。本ルーチンは、回転量センサ26の出力がA−D変換されてECU50に入力されるのに同期して、繰り返し実行される。
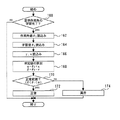
図16に示すルーチンによれば、まず、回転量センサ26の出力に基づいて、現在の作用角θ1が読み込まれる(ステップ180)。次いで、前回の作用角θ2が読み込まれる(ステップ182)。続いて、作用角が拡大方向に変化中であるか否かが判別される(ステップ184)。
上記ステップ184において、現在の作用角θ1が前回の作用角θ2より大きい場合には、作用角が拡大方向に変化中であると判断できる。この場合には、プラス方向の許容幅γに定数Aが代入され、マイナス方向の許容幅κに定数Bが代入される(ステップ186)。これに対し、ステップ184において、現在の作用角θ1が前回の作用角θ2より小さい場合には、作用角が縮小方向に変化中であると判断できる。この場合には、プラス方向の許容幅γに定数Cが代入され、マイナス方向の許容幅κに定数Dが代入される(ステップ188)。
ここで、上記定数A〜Dは、A>B、C<D、A>D、B>Cの各関係を満足するように設定されている。
上記ステップ186または188の処理に続いて、位置センサ28のエッジ出力が発生したか否かが判別される(ステップ190)。このステップ190において、エッジ出力が発生したと判別された場合には、上記ステップ180で読み込まれた作用角θ1は、今回のエッジ出力発生タイミングにおける作用角に相当する。この場合には、次に、今回発生したエッジ出力についての基準作用角の学習が完了しているか否かが判別される(ステップ192)。このステップ192で、今回発生したエッジ出力についての学習が完了していると判別された場合には、次に、今回発生したエッジ出力についての基準作用角の学習値θ3が読み込まれる(ステップ194)。
上記ステップ194の処理に続いて、判定値αおよびβが算出される(ステップ196)。このステップ196において、判定値αは、正常範囲の上限値であり、上記学習値θ3に上記プラス方向の許容幅γを加算した値(θ3+γ)として算出される。判定値βは、正常範囲の下限値であり、上記学習値θ3からマイナス方向の許容幅κを減算した値(θ3−κ)として算出される。
続いて、上記ステップ180で読み込まれたエッジ出力発生タイミングにおける作用角θ1が、上記判定値αおよびβで規定される正常範囲内にあるか否かが判別される(ステップ198)。すなわち、次式が成り立つか否かが判別される。
β<θ1<α ・・・(3)
β<θ1<α ・・・(3)
上記ステップ198で、上記(3)式が成り立つと判別された場合には、吸気弁10の実作用角と、ECU50の指令値(制御目標値)との間に、有意なずれはないと判断できる。そこで、この場合には、可変作用角機構12は正常であると判定される(ステップ200)。これに対し、上記(3)式が成り立たないと判別された場合には、吸気弁10の実作用角と、ECU50の指令値との間に有意なずれが生じていると判断できる。そこで、この場合には、可変作用角機構12に異常が発生していると判定される(ステップ202)。
なお、上記ステップ190においてエッジ出力が発生していないと判別された場合、あるいは上記ステップ192において今回発生したエッジ出力についての学習が未完了であると判別された場合には、本ルーチンの実行がそのまま終了される。
前述したように、時間同期処理の場合であって作用角が拡大方向に変化しているときの検出誤差は、マイナス方向よりもプラス方向に大きく分布する傾向がある。この傾向に鑑みて、本実施形態によれば、上記ステップ186において、A>Bであるので、プラス方向の許容幅γをマイナス方向の許容幅κより大きく設定することができる。このため、上記の傾向に適合させることができる。
また、時間同期処理の場合であって作用角が縮小方向に変化しているときの検出誤差は、プラス方向よりもマイナス方向に大きく分布する傾向がある。この傾向に鑑みて、本実施形態によれば、上記ステップ188において、C<Dであるので、マイナス方向の許容幅κをプラス方向の許容幅γより大きく設定することができる。このため、上記の傾向に適合させることができる。
また、本実施形態では、前述したように、作用角拡大方向については作用角変化速度が所定の高速度とされ、作用角縮小方向については作用角変化速度が所定の低速度とされる。このため、作用角拡大方向の検出誤差が、作用角縮小方向の検出誤差よりも大きくなり易い傾向がある。この傾向に鑑みて、本実施形態によれば、上記ステップ186および188において、A>D、B>Cであるので、作用角が拡大方向に変化している場合の正常範囲を、作用角が縮小方向に変化している場合の正常範囲より大きくすることができる。このため、上記の傾向に適合させることができる。
以上のように、本実施形態によれば、前述した実施の形態1と同様の効果が得られる。なお、本実施形態では、時間同期処理の場合について説明したが、割り込み処理の場合には、上記ステップ196において、プラス方向の許容幅とマイナス方向の許容幅とを入れ換えればよい。すなわち、κをプラス方向の許容幅とし、γをマイナス方向の許容幅とすればよい。
10 吸気弁
12 可変作用角機構
14 制御軸
16 制御軸駆動装置
16A 出力軸
18 締結部材
20 ローラーアーム
22 揺動カム
24 ロッカーアーム
26 回転量センサ
28 位置センサ
30 ターゲット
32 スロットル弁
50 ECU
12 可変作用角機構
14 制御軸
16 制御軸駆動装置
16A 出力軸
18 締結部材
20 ローラーアーム
22 揺動カム
24 ロッカーアーム
26 回転量センサ
28 位置センサ
30 ターゲット
32 スロットル弁
50 ECU
Claims (8)
- 制御軸と、該制御軸を動かすためのアクチュエータとを有し、前記制御軸を所定方向に動かした場合には内燃機関の気筒に設けられた弁の作用角を拡大させ、前記制御軸を前記所定方向と逆の方向に動かした場合には前記作用角を縮小させる可変作用角機構と、
前記アクチュエータの回転量を検出する回転量センサと、
前記制御軸の位置を検出する位置センサと、
前記回転量センサの出力と前記位置センサの出力とに基づいて、前記可変作用角機構の異常の有無を判定する異常判定手段と、
を備えることを特徴とする可変作用角機構の異常判定装置。 - 前記作用角の変化速度を検出する変化速度検出手段を備え、
前記異常判定手段は、前記変化速度が速い場合ほど、異常無しと判定する基準を緩和する判定基準緩和手段を含むことを特徴とする請求項1記載の可変作用角機構の異常判定装置。 - 前記回転量センサは、前記作用角の変化に伴って連続的に変化する出力を発し、
前記位置センサは、前記制御軸が特定位置に来たときに出力を発し、
前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を前記回転量センサの出力に基づいて検出し、当該作用角と所定の基準作用角との偏差が正常範囲にあるか否かによって前記可変作用角機構の異常の有無を判定することを特徴とする請求項1または2記載の可変作用角機構の異常判定装置。 - 前記偏差がプラスとなる方向の前記正常範囲の大きさと、前記偏差がマイナスとなる方向の前記正常範囲の大きさとを非対称とする正常範囲設定手段を備えることを特徴とする請求項3記載の可変作用角機構の異常判定装置。
- 前記正常範囲設定手段は、前記偏差がプラスとなる方向の前記正常範囲の大きさと、前記偏差がマイナスとなる方向の前記正常範囲の大きさとの大小関係を、前記作用角の変化方向に応じて反転させることを特徴とする請求項4記載の可変作用角機構の異常判定装置。
- 前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を、前記回転量センサの出力がA−D変換される周期と同期した時間同期処理によって取得し、
前記正常範囲設定手段は、前記作用角が拡大する方向に変化している場合には、前記基準作用角を上回る側の前記正常範囲の大きさを、前記基準作用角を下回る側の前記正常範囲の大きさより大きくし、前記作用角が縮小する方向に変化している場合には、前記基準作用角を下回る側の前記正常範囲の大きさを、前記基準作用角を上回る側の前記正常範囲の大きさより大きくすることを特徴とする請求項5記載の可変作用角機構の異常判定装置。 - 前記異常判定手段は、前記位置センサの出力発生タイミングにおける作用角を割り込み処理によって取得し、
前記正常範囲設定手段は、前記作用角が拡大する方向に変化している場合には、前記基準作用角を下回る側の前記正常範囲の大きさを、前記基準作用角を上回る側の前記正常範囲の大きさより大きくし、前記作用角が縮小する方向に変化している場合には、前記基準作用角を上回る側の前記正常範囲の大きさを、前記基準作用角を下回る側の前記正常範囲の大きさより大きくすることを特徴とする請求項5記載の可変作用角機構の異常判定装置。 - 前記基準作用角は、前記作用角が縮小する方向に変化している場合と、前記作用角が拡大する方向に変化している場合とで異なる値であることを特徴とする請求項3乃至7の何れか1項記載の可変作用角機構の異常判定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008043516A JP2009197768A (ja) | 2008-02-25 | 2008-02-25 | 可変作用角機構の異常判定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008043516A JP2009197768A (ja) | 2008-02-25 | 2008-02-25 | 可変作用角機構の異常判定装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009197768A true JP2009197768A (ja) | 2009-09-03 |
Family
ID=41141533
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008043516A Pending JP2009197768A (ja) | 2008-02-25 | 2008-02-25 | 可変作用角機構の異常判定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009197768A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011174416A (ja) * | 2010-02-24 | 2011-09-08 | Toyota Motor Corp | 可変動弁システム |
| EP2525064A1 (en) * | 2010-01-15 | 2012-11-21 | Toyota Jidosha Kabushiki Kaisha | Valve working angle variable system |
| JP2013024141A (ja) * | 2011-07-21 | 2013-02-04 | Toyota Motor Corp | 可変動弁機構の制御装置 |
| WO2018068875A1 (de) * | 2016-10-12 | 2018-04-19 | Daimler Ag | Ventiltriebvorrichtung |
-
2008
- 2008-02-25 JP JP2008043516A patent/JP2009197768A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2525064A1 (en) * | 2010-01-15 | 2012-11-21 | Toyota Jidosha Kabushiki Kaisha | Valve working angle variable system |
| EP2525064A4 (en) * | 2010-01-15 | 2014-07-30 | Toyota Motor Co Ltd | SYSTEM WITH VARIABLE VALVE WORKING ANGLE |
| US9850824B2 (en) | 2010-01-15 | 2017-12-26 | Toyota Jidosha Kabushiki Kaisha | Valve working angle variable system |
| JP2011174416A (ja) * | 2010-02-24 | 2011-09-08 | Toyota Motor Corp | 可変動弁システム |
| JP2013024141A (ja) * | 2011-07-21 | 2013-02-04 | Toyota Motor Corp | 可変動弁機構の制御装置 |
| WO2018068875A1 (de) * | 2016-10-12 | 2018-04-19 | Daimler Ag | Ventiltriebvorrichtung |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4525797B2 (ja) | バルブ特性変更機構の異常判定装置 | |
| JP4196294B2 (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| US10738691B2 (en) | Control device and control method for vehicle drive mechanism | |
| JP4074463B2 (ja) | 内燃機関の可変動弁装置における制御軸回転角位置センサ出力基準位置学習装置 | |
| JP2009197768A (ja) | 可変作用角機構の異常判定装置 | |
| JP4736601B2 (ja) | モータ制御装置 | |
| JP4382531B2 (ja) | 可変動弁システム | |
| JP4941353B2 (ja) | 可変作用角機構の異常判定装置 | |
| JP2007247430A (ja) | 可変動弁機構の制御装置 | |
| JP4888160B2 (ja) | 内燃機関の可変動弁装置 | |
| JP4852992B2 (ja) | 内燃機関の制御装置 | |
| JP2013024141A (ja) | 可変動弁機構の制御装置 | |
| JP5935138B2 (ja) | カム機構の制御装置 | |
| JP2009197767A (ja) | 可変作用角機構の異常判定装置 | |
| JP2007077917A (ja) | 可変動弁機構の異常判定装置 | |
| JP4661600B2 (ja) | 可変動弁機構の制御装置 | |
| JP4978585B2 (ja) | 可変動弁機構の異常判定装置 | |
| JP2011226331A (ja) | 内燃機関の可変動弁装置 | |
| US20130085654A1 (en) | Control apparatus and control method for variable mechanism | |
| JP2008291747A (ja) | 診断装置 | |
| JP4983738B2 (ja) | 異常判定装置 | |
| JP4400648B2 (ja) | 診断装置 | |
| JP4894286B2 (ja) | 内燃機関の可変動弁機構制御装置 | |
| JP4645339B2 (ja) | モータ制御装置 | |
| JP2007051602A (ja) | 内燃機関の可変動弁装置 |