JP2009195581A - X線透視撮影装置およびこれを用いたx線透視撮影システム - Google Patents
X線透視撮影装置およびこれを用いたx線透視撮影システム Download PDFInfo
- Publication number
- JP2009195581A JP2009195581A JP2008042309A JP2008042309A JP2009195581A JP 2009195581 A JP2009195581 A JP 2009195581A JP 2008042309 A JP2008042309 A JP 2008042309A JP 2008042309 A JP2008042309 A JP 2008042309A JP 2009195581 A JP2009195581 A JP 2009195581A
- Authority
- JP
- Japan
- Prior art keywords
- ray
- ray generator
- support frame
- column
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 127
- 238000003384 imaging method Methods 0.000 claims description 83
- 230000001678 irradiating effect Effects 0.000 claims description 2
- 210000001015 abdomen Anatomy 0.000 description 23
- 210000003141 lower extremity Anatomy 0.000 description 22
- 238000002697 interventional radiology Methods 0.000 description 18
- 238000000034 method Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 11
- 238000012360 testing method Methods 0.000 description 7
- 239000003638 chemical reducing agent Substances 0.000 description 6
- 238000001514 detection method Methods 0.000 description 6
- 230000003028 elevating effect Effects 0.000 description 6
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 238000002594 fluoroscopy Methods 0.000 description 5
- 238000005452 bending Methods 0.000 description 4
- 230000003187 abdominal effect Effects 0.000 description 2
- 238000007459 endoscopic retrograde cholangiopancreatography Methods 0.000 description 2
- 241000272201 Columbiformes Species 0.000 description 1
- 238000002583 angiography Methods 0.000 description 1
- 210000000013 bile duct Anatomy 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 238000009608 myelography Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 208000016853 pontine tegmental cap dysplasia Diseases 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 230000002485 urinary effect Effects 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/548—Remote control of the apparatus or devices
Abstract
【解決手段】 被検体Pを載置する天板40を有する支持枠30でX線発生器60を支持する支柱部50を支持し、この支柱部50を、前記支持枠30側の支柱部50の端部と、X線発生器60側の端部とが、前記支持枠30の長手方向にずれる形状とする。この形状の支柱部50をA10方向に回転させる支柱部回転機構500mと、前記X線発生器60をA11方向に回転させる第2のX線発生器回転機構600mとにより、前記支柱部50とX線発生器60とを回転させて該支柱部50及びX線発生器60を被検体Pの透視及び/又は撮影部位に位置決めする。また、このX線透視撮影装置1を使用してX線透視撮影システムを構築するときは、X線透視撮影装置1と、該透視撮影台1に電力を供給するX線高電圧装置と、これらを統合的に操作する遠隔操作卓とから構築する。
【選択図】 図2
Description
(1)前記支柱部は、前記支持枠側から前記X線発生器側に向かって斜め方向にせり出す。
(2)前記支柱部は、前記X線発生器側に向かって前記支持枠の長手方向と短手の両方に延びる。
(3)前記支柱部は、前記支持枠から離れる方向に向かって凸となるように湾曲する。
前記X線検出器を前記支持枠の長手方向又は短手方向にスライドさせるX線検出器スライド機構を備えた。
前記X線検出器を回転させるX線検出器回転機構を備えた。
前記X線検出器スライド機構及び/又は前記X線検出器回転機構に、前記支柱部のスライド状態を検知する検出器と、前記X線発生器に従動するように前記X線検出器をスライド及び/又は回転させるX線検出器移動制御装置とを備えた。
前記表示装置は、多関節のアームにより前記スタンド部に支持される。
(1)術者は被検体のあらゆる方向からアクセスすることができるので、種々のIVR手技から健康診断にいたるまで、多種多様の用途に使用することができる。
(2)しかも、IVR手技においては、複数の術者が、被検体の両側側から被検体にアクセスできるので、IVR手技を効率良く行うことができる。
(3)また、多人数でIVR手技に取り組むことができるので、難度の高い手術の場合においても短時間で手術を終えることが可能である。その結果、被検体Pの負荷を低減することができる。
(4)さらに、X線透視撮影装置を従来と同様に使用することも可能である。
被検体Pに照射するX線を発生する後述のX線発生器60に電力を供給するX線高電圧装置2と、これらの機器を統合的に操作する遠隔操作卓3とを備えて構成される。上記システムを構成する機器のうち、X線透視撮影装置1とX線高電圧装置2は、被検体Pの透視撮影を行なう撮影室100に設置され、遠隔操作卓3は、撮影室100に隣接する操作室200に設置される。
なお、撮影室100と操作室200との間には、窓200wが設けられ、操作室200から撮影室100の様子を監視することができるようになっているが、この窓200wも、撮影室100からのX線を遮蔽できるように、鉛入りガラスなどで構成されている。
そして、IVRの術式に応じて、撮影技師W1,W2が遠隔操作卓3を操作して、被検体Pに照射するX線の強度などを調節する。
遠隔操作卓3に入力されたX線の強度と照射間隔情報に基づいて、X線高電圧装置2は、透視又は撮影に対応した管電圧(後述のX線管球の陽極と陰極間に印加する電圧)、管電流(後述のX線管球の陽極と陰極間に流れる電流)になる電力をX線発生器60に供給する。
<X線透視撮影装置の全体構成>
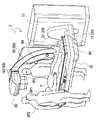
図2に示すように、本発明による第1の実施形態のX線透視撮影装置1は、床面に設置されるスタンド部10と、スタンド部10に支持され、スタンド部10の一側面側に突出する支持腕部20と、支持腕部20に支持され、支持腕部20の突出方向とほぼ直交する方向に延びる支持枠30と、支持枠30に支持され、被検体Pを載置する天板40とを備える。
A2方向…スタンド部10に対する支持枠30の昇降動方向(床面鉛直方向)
A3方向…支持枠30の起倒動方向(支持腕部20の突出方向を軸とした回転方向)
A4方向…支持枠30に対する支柱部50の長手動方向(支持枠30の長手方向)
A5方向…支持枠30に対する支柱部50の左右動方向(支持腕部20の突出方向)
A6方向…支柱部50の先端部に対する第1のX線発生器60の回転動方向(A5方向を中心とした回転方向)
A7方向…支持枠30に対するFPD70の長手動方向(支持枠30の長手方向)
A8方向…支持枠30に対するFPD70の左右動方向(支持腕部20の突出方向)
A9方向…FPD70の回転動方向(床面鉛直方向を中心とした回転方向)
A10方向…支持腕部20に対する支柱部50の支柱本体52を回転させる支柱本体回転動方向(支持腕部20を軸とした回転方向)
A11方向…支柱部50の先端部に対する第2のX線発生器60の回転動方向(A4方向を中心とした回転方向)。
図3は、上記支柱部回転機構500m及び第2のX線発生器回転機構600mも含めた本発明の第1の実施形態によるX線透視撮影装置1の模式図である。
以下、図2〜図15を用いてX線透視撮影装置1の各構成要素を詳細に説明すると共に、各構成要素を動作させる機構についても合わせて説明する。
スタンド部10は、X線透視撮影装置1全体を支える筐体である。このスタンド部10の内部には、図6に示すように、支持腕部20をスタンド部10に対して昇降させるA2方向昇降機構12m及び支持腕部20をスタンド部10に対して回転させるA3方向回転機構13mなどが収納されている。また、これらの機構を支持する骨格10sに隣接する側板11には、各構成要素を制御する制御基板が多数実装されている。
支持腕部20は、スタンド部側連結片21と支持枠側連結片22とを備え、スタンド部側連結片21が前述の回転軸部13sを介してスタンド部10に支持される。
つまり、支持腕部20が、回転軸部13sを介してスタンド部10のA3方向回転機構13mに軸支されることになり、図2の矢印A3方向に回転自在に構成される。
また、すでに述べたように、A3方向回転機構13mが昇降ユニット12uに支持されているので、支持腕部20は、図2の矢印A2方向に昇降自在に構成される。
支持枠30は、前述のA1方向スライド機構22mにより、支持腕部20に対して支持腕部20の突出方向と直交する方向(図2のA1方向)にスライド可能に構成されている。この支持枠30の上部には、被検体Pを載せる天板40が設けられている。本例のX線透視撮影装置1では、天板40は固定されているが、支持枠30に対してスライド自在に構成しても良い。
支柱部50は、A4方向スライド機構30mにより支持枠30の長手方向にスライド自在に構成される基底部51と、前記支持腕部20に設けられた後述の支柱部回転機構500mによってA10方向(図2を参照)に回転可能な支柱本体52と、支柱本体52の先端でX線発生器60を支持する連結部53とを備える。
この支柱部回転機構500mは、図10に示すように、支柱部50に固定される軸550及びギヤ551と、前記支柱部50の支柱本体52を回転自在に支持するハウジング(支持腕部20)に設けた前記軸550を軸支する軸受け552と、前記ハウジング(支持腕部20)に設けた前記支柱本体52を回転させる駆動力を発生するためのモータ553と、このモータ553に連結されたギヤ554及び減速機555と、この減速機555の回転駆動力を前記支柱本体52に伝達するための前記ハウジング(支持腕部20)に設けたプーリ556及び前記支柱部50に設けたプーリ557と、前記プーリ556とプーリ557とを連結するベルト558と、前記支柱本体52の回転角度情報を検出するエンコーダ559とを備え構成される。このように構成された支柱部回転機構500mにより、モータ553を回転させて支柱本体52を被検体Pの透視及び/又は撮影部位に位置決めする。
X線発生器60は、支柱部50の先端側に取り付けられ、被検体PにX線を照射する機器である。X線発生器60は、公知の構成を有するものを使用すれば良く、X線高電圧装置2から電力供給を受けてX線を発生させるX線管球を有する。
また、X線発生器60には、X線の照射範囲を制限する公知の可動絞りや、特定のエネルギーのX線を選択的に透過させるX線フィルタなどを設けてもかまわない。
したがって、主動滑車532を回転させることにより回転軸部53sを回転させることができ、その結果、回転軸部53sのうち、従動滑車533と反対の端部に固定されるX線発生器60を支柱部50の先端部(連結部53の先端部)に対して図2のA6方向に回転させることができる。これによって、X線の照射方向を天板40の長手方向に振ることができる。
このように構成された第2のX線発生器回転機構600mにより、モータ604をA11方向に回転させてX線発生器60を被検体Pの透視及び/又は撮影部位に位置決めする。
FPD70は、複数の検出素子が二次元アレイ状に配置されて構成されており、X線発生器60から照射され、被検体Pを透過したX線の入射量に応じた画像データを検出する機器である。このFPD70は、図7に示すように、支持枠30の内部にあって、FPD駆動機構70mの上に配置されており、X線発生器60を支持する支柱部50とは、機構的に連結されていない。
したがって、回転軸部73sを図2の矢印A9方向に回転させることにより、FPD70を回転させることができる。この回転軸部73sは、FPD70を90°単位で回転させるようになっている。即ち、回転軸部73sと第2モータ731とを備える回転機構(X線検出器回転機構)は、FPD70の縦横を変えるための構成である。
表示装置80は、図2に示すように、2枚の並列されたモニタ81,82からなり、多関節のアーム800によりスタンド部10に支持されている。
モニタ81,82は、被検体Pの透視、撮影映像を表示することができる。また、2枚のモニタ81,82のうち、一方をX線透視撮影装置1以外の機器から入力した映像を表示することに使用しても良い。例えば、内視鏡映像や超音波診断映像などを表示しても良い。
上記支柱部50及びX線発生器60の項で説明したように、X線発生器60を支持する支柱部50を、該支柱部50の支持枠30側の端部と、X線発生器60側の端部とが、前記支持枠30の長手方向にずれている構造とし(図4を参照)、さらに前記支柱部50の支柱本体52をA10方向(図2を参照)に回転させる支柱部回転機構500m(図10を参照)と、該支柱本体52で支持されるX線発生器60をA11方向(図2を参照)に回転させるための第2のX線発生器回転機構600m(図11を参照)を設けた。これによって、術者は被検体Pの頭部、腹部、下肢部及びこれらの両側側のいずれからもアクセスすることが可能である。
1) 支柱部50を、支持枠30の長手方向と幅方向にスライドさせて(図7のA4方向スライド機構30m及びA5方向スライドユニット51uを参照)被検体Pの腹部の透視/及び又は撮影に適する位置に位置決めする。
1) 支柱部50を、支持枠30の長手方向と幅方向にスライドさせて(図7のA4方向スライド機構30m及びA5方向スライドユニット51uを参照)被検体Pの下肢部の透視/及び又は撮影に適する位置に位置決めする。
そして、この位置決め後に、第1のX線発生器回転機構53mを動作させてX線の照射方向を決め、この照射方向に対応した位置にX線検出器70を位置決めする。なお、必要に応じて支柱部50を支持枠30の長手方向及び/又は短手方向(左右方向)にスライドさせて上記構成要素の位置決めを行う。
上記のX線透視撮影装置1を用いたX線透視撮影システムを使用した透視撮影の状態を図16〜図18に基づいて説明する。なお、これらの図には、透視撮影システムのうち、X線透視撮影装置1のみを示す。また、同図の破線は、FPD70の移動範囲を示す。
もちろん、図16(B)に示すように、支持枠30を支持腕部20に対して紙面の左側に移動させた状態としても良い。この場合、支柱部50の傍に立つ術者OP3の背後にスタンド部10が存在しないため、術者OP3の背後に補助者が立ったり、術者OP3の使用する手術道具などを配置することができる。
図16(A)の状態から図17(A)の状態にするときは、支持枠30を支持腕部20に対して紙面左側に移動させると共に、支柱部50を支持枠30に対して紙面右側に移動させる。一方、図16(B)の状態から図17(A)の状態にするときは、支持枠30を支持腕部20に対して動かすことなく、支柱部50を支持枠30に対して紙面右方向に移動させる。この図17(A)の場合でも、やはりX線発生器60を挟んで被検体Pの両側側に術者OP1,OP3の立ち位置を確保することができるので、IVRに好適である。
但し、支持枠30に対して天板40を移動させたときに、支持枠30から突出する天板40の部分に曲げ応力が作用するため、支持枠30に対して天板40を長手方向に移動させることができる範囲をあまり大きくすることはできない。
上記したように、術者がX線透視撮影装置1に載置された被検体Pのあらゆる方向からアクセスすることにより、上記X線透視撮影システムを種々の術式に適用することができる。
例えば、図5に示すように、X線発生器60とFPD70によるX線検出器と(以下、X線撮影系と記す)を位置決めした場合は、肺生検、経皮経肝胆管ドレナージ(Percutaneous Transhepatic Cholangio Drainage:PTCD)、脊髄腔造影(ミエログラフィー)に適用できる。
また、多人数でIVR手技に取り組むことができるので、難度の高い手術の場合においても短時間で手術を終えることが可能である。その結果、被検体Pの負荷を低減することができる。
図20は、本発明の第2の実施形態によるX線透視撮影装置で、被検体Pへのアクセスエリアを必要とせず、従来のX線透視撮影装置と同様にX線発生器60の端部と支持枠30側の端部とがずれることなく位置決めした場合のX線透視撮影装置1'の模式図である。
このままでは、X線発生器60は、被検体Pの透視撮影部位から紙面左方向にずれた状態になるので、前記X線発生器スライド機構によりX線発生器60を紙面左方向(スタンド10側)に移動させて、被検体Pの透視撮影部位に位置決めする。勿論、この場合、必要に応じて上記第2のX線発生器回転機構600mを動作させることも可能である。
例えば、X線検出器としてFPDを用いたが、イメージインテシファイヤとTVカメラとを組み合わせたもの等の他のX線検出器を用いても良い。
また、上記構成要素の回転や移動機構も、上記実施形態に限定するものではなく、回転や移動が可能であれば、どのような機構を用いても構わない。
Claims (11)
- 床面に載置されるスタンド部と、このスタンド部に支持され、前記スタンド部の一側面側に突出する支持腕部と、この支持腕部に支持され、前記支持腕部の突出方向とほぼ直交する方向に延びる支持枠と、この支持枠に支持され、前記被検体を載置する天板と、前記被検体にX線を照射するX線発生器と、前記支持枠に支持され、前記X線発生器を支持する支柱部と、前記支持枠の内部で前記X線発生器と対向して配置され、前記被検体を透過したX線を検出するX線検出器と、前記支持腕部を軸とした方向に前記支柱部を回転させる支柱部回転機構と、前記X線発生器を前記支持腕部の突出方向に回転させる第1のX線発生器回転機構と、前記X線発生器を前記支持枠の長手方向に回転させる第2のX線発生器回転機構と、前記被検体の透視及び/又は撮影映像を表示する表示装置とを備えたことを特徴とするX線透視撮影装置。
- 前記X線発生器の固定部に前記第1のX線発生器回転機構と前記第2のX線発生器回転機構とを備えたことを特徴とする請求項1に記載のX線透視撮影装置。
- 前記第2のX線発生器回転機構による前記X線発生器の回転角度は、前記支柱部回転機構による前記支柱部の回転角度と同じであって、前記第2のX線発生器回転機構による前記X線発生器の回転方向は、前記支柱部の回転方向と逆方向であることを特徴とする請求項1又は2に記載のX線透視撮影装置。
- 前記支柱部回転機構に前記支柱部の回転角度を検出する支柱部回転角度検出器と、前記第2のX線発生器回転機構に前記X線発生器の回転角度を検出するX線発生器回転角度検出器とを備え、前記検出器で検出した前記支柱部の回転角度情報と前記X線発生器の回転角度情報とを用いて前記X線検出器より得られる画像の被検体の頭―足方向が前記表示装置に表示される出力画像の上下方向に一致するように前記X線検出器を前記支柱部に従動して制御するX線検出器回転制御装置を備えたことを特徴とする請求項1に記載のX線透視撮影装置。
- さらに、前記X線発生器を前記支持枠の短手方向にスライドするX線発生器スライド機構を備えたことを特徴とする請求項1に記載のX線透視撮影装置。
- 前記支柱部は、前記X線発生器側に向かって前記支持枠の長手方向と幅方向の両方に延びていることを特徴とする請求項1に記載のX線透視撮影装置。
- 前記支柱部が、前記支持枠から離れる方向に向かって凸となるように湾曲していることを特徴とする請求項1に記載のX線透視撮影装置。
- 前記支柱部を前記支持枠の長手方向又は短手方向にスライドさせる基底部を備えたことを特徴とする請求項1に記載のX線透視撮影装置。
- 前記X線検出器を前記支持枠の長手方向又は短手方向にスライドさせるX線検出器スライド機構を備えたことを特徴とする請求項1に記載のX線透視撮影装置。
- 前記X線検出器を回転させるX線検出器回転機構を備えたことを特徴とする請求項1に記載のX線透視撮影装置。
- 撮影室に載置される請求項1乃至10のいずれか1項に記載のX線透視撮影装置と、前記撮影室に設置され、前記X線発生器に電力を供給するX線高電圧装置と、前記撮影室とは別の操作室に設置され、前記X線透視撮影装置及び前記X線高電圧装置を統合的に操作する遠隔操作卓とを備えたことを特徴とするX線透視撮影システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008042309A JP2009195581A (ja) | 2008-02-25 | 2008-02-25 | X線透視撮影装置およびこれを用いたx線透視撮影システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008042309A JP2009195581A (ja) | 2008-02-25 | 2008-02-25 | X線透視撮影装置およびこれを用いたx線透視撮影システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009195581A true JP2009195581A (ja) | 2009-09-03 |
| JP2009195581A5 JP2009195581A5 (ja) | 2011-04-07 |
Family
ID=41139791
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008042309A Pending JP2009195581A (ja) | 2008-02-25 | 2008-02-25 | X線透視撮影装置およびこれを用いたx線透視撮影システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009195581A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101457099B1 (ko) | 2011-11-25 | 2014-10-31 | (주)젬스메디컬 | 의료용 3d 디지털 방사선 촬영 시스템의 튜브 지지대, 메인 구동부 및 이를 이용한 촬영 포지션 조정 방법 |
| JP2021053168A (ja) * | 2019-09-30 | 2021-04-08 | 富士フイルム株式会社 | 放射線撮影装置及び放射線撮影装置の制御方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001008931A (ja) * | 1999-06-16 | 2001-01-16 | Siemens Ag | 多機能x線診断装置 |
| JP2004065807A (ja) * | 2002-08-09 | 2004-03-04 | Hitachi Medical Corp | X線撮影システム |
| JP2005287660A (ja) * | 2004-03-31 | 2005-10-20 | Shimadzu Corp | 放射線透視撮影装置 |
-
2008
- 2008-02-25 JP JP2008042309A patent/JP2009195581A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001008931A (ja) * | 1999-06-16 | 2001-01-16 | Siemens Ag | 多機能x線診断装置 |
| JP2004065807A (ja) * | 2002-08-09 | 2004-03-04 | Hitachi Medical Corp | X線撮影システム |
| JP2005287660A (ja) * | 2004-03-31 | 2005-10-20 | Shimadzu Corp | 放射線透視撮影装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101457099B1 (ko) | 2011-11-25 | 2014-10-31 | (주)젬스메디컬 | 의료용 3d 디지털 방사선 촬영 시스템의 튜브 지지대, 메인 구동부 및 이를 이용한 촬영 포지션 조정 방법 |
| JP2021053168A (ja) * | 2019-09-30 | 2021-04-08 | 富士フイルム株式会社 | 放射線撮影装置及び放射線撮影装置の制御方法 |
| US11510640B2 (en) | 2019-09-30 | 2022-11-29 | Fujifilm Corporation | Radiography apparatus and method for controlling radiography apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4179564B2 (ja) | X線透視撮影台およびx線透視撮影システム | |
| KR100946999B1 (ko) | 레일시스템 및 이를 이용한 엑스선촬영장치 | |
| JP2010082431A (ja) | X線画像診断装置及びx線装置 | |
| JP4481392B2 (ja) | X線診断装置 | |
| EP3342349B1 (en) | Robotic operating table and hybrid operating system | |
| WO2008012864A1 (en) | Method of controlling x-ray diagnosis device | |
| WO2001078603A1 (fr) | Dispositif de radiographie | |
| JP2013128585A (ja) | X線診断装置 | |
| JP4508326B2 (ja) | X線透視撮影装置 | |
| JPH09117442A (ja) | X線診断装置 | |
| JP2010158257A (ja) | 放射線画像撮影装置および放射線画像撮影システム | |
| JPH09140689A (ja) | X線撮影システム及びその制御方法 | |
| JP2003339686A (ja) | X線撮影装置 | |
| JP4393462B2 (ja) | X線撮影装置 | |
| EP1245189B1 (en) | Apparatus for x-ray fluoroscopy and radiography | |
| JPH08336518A (ja) | 医用x線透視装置 | |
| JP2009195581A (ja) | X線透視撮影装置およびこれを用いたx線透視撮影システム | |
| JPH08112272A (ja) | 2方向x線透視撮影装置 | |
| JPH11206744A (ja) | X線診断装置 | |
| JP2006246989A (ja) | X線透視撮影台 | |
| JP4672759B2 (ja) | X線透視撮影台 | |
| JP5091506B2 (ja) | X線診断装置 | |
| JP2007301409A (ja) | X線診断装置の制御方法 | |
| JP2004216193A (ja) | 2方向x線透視撮影装置 | |
| JP2001190548A (ja) | X線透視撮影装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110222 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130906 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131118 |